Spis treści:
1. Omów schemat funkcjonalny typowego układu sterowania automatycznego z pętlą sprzężenia zwrotnego.
2. Scharakteryzuj dwa podstawowe zadania realizowane w układach sterowania autom.-zadanie przestawiania i nadążania.
3. Opisz typowe sytuacje, w których projektant układów regulacji zmuszony jest do poszukiwania kompromisowych rozwiązań.
4. Wymień podstawowe modele liniowych obiektów dynamicznych (modele wej-wyj oraz model w przestrzeni stanu). Omów wzajemne związki między tymi modelami.
5. Opisz klasę równoważności podobnych modeli w przestrzeni
6. Zdefiniuj macierz fundamentalną liniowego jednorodnego r-nia
różniczkowego x'(t) = A*x(t) , x(t0)∈Rn. Opisz znane Ci sposoby wyznaczania takiej macierzy.
9. Co to jest „diagonalizacja“ modelu w przestrzeni stanu? Procedura takiej diagonalizacji. Czy każda macierz stanu da się zdiagonalizować?
10. Podaj definicje BIBO stabilności liniowego obiektu dynamiczn.
11. Podaj definicję oraz kryterium stabilności asymptotycznej liniowego obiektu dynamicznego
12. Podaj definicje oraz kryterium stabilności wewnętrznej liniowego obiektu dynamicznego
14. Zdefiniuj pojecie uchybu sterowania. Omów główne przyczyny pojawienia się uchybów. Jakie środki, aby ograniczyć wartość uchybu.
15. Podaj definicje astatyzmu I stopnia układu regulacji automatycznej.
16. Dany jest układ zamknięty z jednostkowym, ujemnym sprzężeniem zwrotnym, obejmującym tor główny złożony z szeregowo połączonych korektora Gc(s)=(s-1)/s oraz obiektu Gp(s)=2/(s-1). Dlaczego taki sposób korekcji jest niedopuszczalny?
17. Dany jest model: (rysunek) Podaj warunki, jakie należy nałożyć na wartości nastaw k oraz T, aby w tym układzie doprowadzić do zerowania się ustalonego uchybu położeniowego. Jaka będzie wówczas wartość ustalonego uchybu prędkościowego?
18. Wymień zasady wykreślania linii pierwiastkowych.
19. Uzasadnij reguły kreślenia LP
20. Wykreśl orientacyjny przebieg linii pierw dla zadanego przykładu f przenoszenia… Jakie wnioski płyną z tego przebiegu?
21. Scharakteryzuj pojęcie dobrej określoności liniowego układu dynamicznego. Podaj prosty przykład układu ze sprzężeniem zwrotnym, który nie jest dobrze określony. Zinterpretuj własności takiego układu w oparciu o metodę linii pierwiastkowych.
22. Omów bezpośrednie (w dziedzinie czasu) oraz pośrednie (w dziedzinie częstotliwości) wskaźniki jakości regulacji, odnoszące się do (i) stabilności układu zamkniętego oraz do (ii) szybkości procesów przejściowych w tym układzie.
23. Omów podst charakter oraz praktyczne wskaźniki opisujące człon dynamiczny I rzędu
24. Omów podst charakter oraz praktyczne wskaźniki opisujące człon dynamiczny II rzędu
25. Scharakter prostą metodę syntezy ukł regulacji, w której człon dynamiczny II rzędu wykorzystywany jest jako pewna wzorcowa f-kcja przenoszenia projektowanego ukł zamknietego
26. Dany jest układ, w którym człon k/(s(1+s)) w torze głównym objęty jest jednostkowym ujemnym sprzężeniem zwrotnym. Zakł, że k>0 jest nastawą swobodną, rozważ wpływ wart tej nastawy na własności odp skokowej i charakter modułu tego układu
27. Opisz typ monotoniczności następujących praktycznych wskaźników jakości regulacji, odpowiadających wzorcowej funkcji przenoszenia drugiego rzędu …
28. Scharakter prostą metodę syntezy układów regulacji, opartą na koncepcji pary biegunów dominujących wybranej f przenoszenia
29. Dany jest ukł, w którym tor głowny tworzy regulator Gr(s) szeregowo połączony z obiektem Gp(s), zaś ujemne sprzężenie zwr ma charakter jedn. Omów motywy, które legły u podstaw tej metody syntezy regulatora w oparciu o wzór…
30. Uzasadnij tezę, ze obecnośc zer f-kcji przenoszenia ukł otwartego w prawej półpł zespol może w istotny sposób ograniczać statyczną dokładn regulacji.
31. Omów właściwości oraz zastosowanie korektora (regulatora) przyspieszającego fazę LEAD. Posługując się metodą linią pierwiastkowych oraz metodą charakterystycznych częstotliwościowych, podaj stosowne interpretacyjne motywujące użycie takiego korektora w układzie regulacji automatycznej. (rys.)
32. Omów własności oraz zastosowanie korektora (regulatora) opóźniającego fazę LAG. Posługując się metodą linii pierwiastkowych oraz metoda charakterystyk częstotliwościowych, podaj stosowne interpretacje motywujące użycie takiego korektora w ukł. regulacji auto.
33. Wyznacz asymptotyczne charakterystyki Bodego
35. podaj kryterium Nyquista
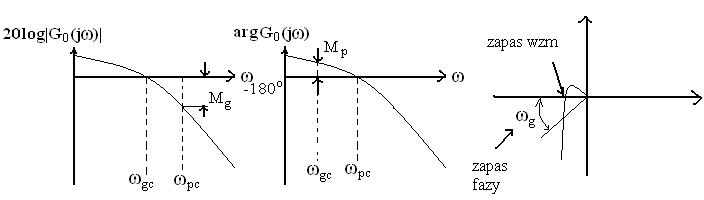
36. Podaj definicje zapasów (marginesów) wzmocnienia oraz fazy układu regulacji ze sprzężeniem zwrotnym. Interpretacje tych definicji w oparciu o charakterystyki Nyquista i Bodego otwartego układu regulacji.
37. Scharakter głowne zał metody korekcji liniowych ukł dynam ze sprzężeniem zwrotnym w oparciu o charakter częstotliwość
38. Omów rolę członu całkującego w korektorze dynamiki toru głównego układu regulacji. Przedstaw interpretacje w oparciu o linie pierwiastkowe oraz charakterystyki częstotliwościowe.
40. Metody strojenia regulatorów PID
42. zaproponuj sposoby identyfikacji parametrów podst członów dynam I i II rzędu na podst odpowiednio dobranych empirycznych danych pozyskanych w dziedzinie czasu i częstotliwości
1. Wielkość zadana podawana jest na zadajnik, którego zadaniem jest dopasowanie tego sygnału, aby był zrozumiały dla urządzenia sterującego( ograniczenie sygnału, filtracja, perkompensacja, dostarczenie sygnału różnicowego). Sterownik ma za zadanie wypracować sygnał sterujący, na podstawie sygnału różnicowego=wielkość zadana-wielkosc sterowana(uchyb). Sygnał sterujący oddziaływuje na obiekt w ten sposób, aby naśladował on w jak największym stopniu sygnał zadany. Czujnik w torze sprzężenia zwrotnego dostarcza informacji o efektywności procesu sterowania. Zadania sterownika:-zapewnianie układowi zamkniętemu stabilności; -ograniczanie wpływu zakłóceń;- ograniczanie wpływu niepewności wiedzy o obiekcie(nieliniowość, niestacjoarność charakterystyk).
2. Zadanie przestawiania: -rzadkie, ale gwałtowne zmiany sygnału zadającego, - duży(istotny) wpływ zakłóceń, - mały uchyb e(t) możliwy tylko dla chwil czasu wystarczająco odległych od momentu zmiany sygnału zadającego., emax—dopuszczalny uchyb, Ts-czas ustalania // |e(t)|=<max, dla każdego t>=Ts Np. sterowanie windą || Zadanie nadążania:-ciągłe zmiany o niegwałtownym
charakterze; - wpływ zakłóceń we wstępnych procesach projektowania do pominięcia; - mały uchyb e(t) dla każdej chwili sterowania
3. Nie można np.: uzyskac dużej dokładności sterowania i krótkiego czasu wykonania.Ramię robota może szybko i z dużym przeregulowaniem (czyli ryzykując zniszczenie przedmiotu) dosunąć go do ściany, albo dokładnie lecz powoli przesunąc go bez takiej groźby.
4. (a) modele wejściowo-wyjściowe (modele transmitancyjne) - nadają się dobrze do opisu procesów, których wyjścia przyjmują wartości rzeczywiste i charakteryzują się wykładniczą zmianą w czasie wartości wyjścia w odpowiedzi na skokową zmianę ich wejścia. || g(t) - odp impulsowa ukl dynamicznego //G(s) - transmitancja uk dyn //Y(s)=G(s)*U(s) || y(t)=g(t)*u(t)= 0∫tg(τ)*u(t-τ)dτ =0∫t g(t-τ)*u(τ)dτ splot || U(s) i Y(s) mogą być wektorami, czyli G(s) jest macierzą operatorowych transm: g(t)G(s) : G(s)=L[g(t)] , g(t)=L-1[G(s)]
(b) modele w przestrzeni stanu: x'(t)=Ax(t)+Bu(t) równ stanu(rel dynam) //y(t)=Cx(t)+Du(t) równ wyjścia, obserwacji, rel statyczn // gdzie: x(t)wektor stanu / u(t) wekt wejść (pobudzeń) / y(t) wekt wyjść (obserwacji, pomiarów) || zmienne stanu - zbiór (o min liczności) wielkości, których znajomość wraz z inform o aktualnym i przyszłym sterowaniu (u(t), t>=t0) jednoznacznie opisuje przyszłe (t>=t0) zachowanie się danego układu || Zwiazek miedzy tymi modelami:
G(s)=C(sI-A)-1B+D=CΦ(s)B+D // g(t)= L-1[G(s)]=L-1[C(sI-A)-1 B+D]= CΦ(t)B+D
5. Dane są dwa n - wymiarowe modele w przestrzeni stanu:
x'(t) = Axx(t) + Bxux(t) , x(0). z'(t) = Azz(t) + Bzuz(t) , z(0)
yx(t) = Cxx(t) + Dxux(t) yz(t) = Czz(t) + Dzuz(t)
Takie modele nazywamy parametrycznie podobnymi, jeżeli istnieje taka nieosobliwa macierz P∈Rn x n (macierz podobieństwa), że:
Az = P-1AxP // Bz = P-1Bx // Cz = CxP // Dz = Dx
*Modele te nazywamy podobnymi o ile są parametrycznie podobne a ponadto : ux(t) = uz(t) = u(t) oraz x(0) = Pz(0)
*Modele parametryc podobne mają taką samą operatorową transmitancję. Posiadają również identyczne odp impulsowe i skokowe:
Dla modeli podobnych ponadto:
x(t) = P*z(t) // yx(t) = yz(t) = y(t)
6. DEF: Φ(t)=exp(At), x(t0)∈R , gdzie , exp(At), - macierz fundamentalna macierzy A|| można ją wyrazić przez jej postać operatorową: Φ(s)=(sI-A)-1 ||| Sposoby wyznaczania: a) MF można wyznaczyć z operatorowego opisu zmiennych stanu. Wiedząc, że operatorowa postać Φ(s) MF wynosi Φ(s)=(sI-A)-1, natomiast MF: Φ(t)=L-1[Φ(s)]=L-1[(sI-A)-1]=exp(At) /// b) korzystając z macierzy modalnej (diagonalizująca macierz podobieństwa) M = [x1 ; x2 ;…;xn] , M∈Rn x n - macierz modalna zawierająca wektory własne xi, i∈{1,…,n} macierzy A. Jeżeli przyjmiemy zał (o jednokrotności wart własnych mac A):

λi=λj dla i≠j oraz i,j∈{1,…,n} ; wektory własne xi≠0 macierzy A spełniają równanie Axi=λixi które można wyrazić przez AM=MΛ , gdzie: Λ= ![]()
Λ∈Rn x m - macierz diagonalna zawierająca wartości własne λi macierzy A . Ze wzoru AM=MΛ wynika, że A=MΛM-1 zaś Λ=M-1AM, co oznacza, że macierze te są podobne, czyli: eAt = def.=
dla każdego i zachodzi zatem (MΛM-1)i= (MΛiM-1),czyli eAt = M eΛt M-1 ,gdzie eΛt = ![]()
, a jesli przyjmiemy za M-1
jako M-1 = ![]()
,yi∈Cn i∈{1,…,n} wtedy mamy do czynienia, z diadyczną postacią MF: eAt = ![]()
9. Diagonalizacja (diag)macierzy stanu odpowiada sprowadzeniu pierwotnego stanowego modelu {A,b,c} do podobnej postaci o równoległej (odprzężonej) strukturze {M−1AM,M−1b,cM}. W wyniku diag mac stanu przyjmuje postać mac diagonalnej. Elementami są wartości własne macierzy stanu. PROCEDURA: Aby wyznaczyć zbiór wartości własnych macierzy A (λ1λ2,..,λn) należy rozw równ char det(λiIn-A)=0 z czego wyznaczyć spektrA{λ1λ2…λn} nast. wyliczamy wektory własne z równ (A -λiIn)xi = 0, stąd otrzymamy przykładowe rozw x1 x2..xn i otrzymujemy macierz modalna M = [x1 x2..xn] , M∈Rn x n teraz wyliczamy mac odwr do mac modal M, M-1 = ![]()
, liczymy MF z jej postaci diadycznej i wykonujemy spr czy M diagonalizuje mac A M-1AM=A
Aby macierz można było zdiagonalizować musi być spełnione zał o jednokrotności wartości własnych (zał: λi=λj dla i≠j oraz i,j∈{1,…,n}) macierzy A. Jeśli to nie jest spełnione (występują wielokrotne wartości własne) diagonalizacja jest możliwa o ile tylko liczba liniowo niezależnych wektorów własnych związanych z daną wartością własną λ∈spectrA badanej macierzy równa się arytmetycznej krotności tej wartości własnej (wielokrotność arytmetyczna równa geometrycznej)
10. System reprezentowany przez g(t) (G(s))) jest Lp-stabilny(stabil w sensie Lp) gdy: 1) u∈Lp y∈Lp ; 2) ||y||p≤ c||u||p dla pewnej stałej c≥0 oraz dla każdego u∈Lp,gdy przyjmiemy p=∞ mamy do czynienia z L∞ stabilność w sensie BIBO, czyli każdemu ograniczonemu wejściu odpowiada ograniczone wyjście. Kryterium stabiln: wszystkie bieguny transmitancji G(s) muszą leżeć w lewej otwartej półpłaszczyźnie płaszczyzny zespolonej (części rzeczywiste wszystkich biegunów muszą być ujemne)
11. Ukł. x'(t)=Ax(t) jest asymptotycznie stabilnygdy dla dowolnych war początk x(0)∈Rn zachodzi limt->∞||x(t)||= 0. Asympt. stab. definiuje się tylko dla ukł. autonomicznego(o zerowym pobudzeniu u(t)=0). Kryterium AS: wszystkie wartości własne macierzy A muszą leżeć w lewej otwartej półpłaszczyźnie płaszcz. zespolonej.
12. Ukł. jest wewn stabilny gdy jest BIBO stabilny dla każdej pary wej-wyjście możliwej do wyróżnienia w tym układzie. Ponadto ukł jest wewn stab, gdy żadna z transmitancji stanowiących elementy odwr macierzy nie posiada biegunów w prawej domkniętej półpłaszczyźnie płaszczyzny zespolonej. Kryterium:1)wyznacznik mianownika nie posiada zer w prawej domkniętej półpłaszczyźn płaszczyzny zespol; 2) w iloczynie (w mianowniku) nie występują skreślenia w parach złożonych z zera i bieguna z prawej domkniętej półpłaszcz płaszcz zespol.
14. Uchyb - różnica pomiędzy wielkością zadaną a wielkością sterowaną e(t) = r(t)-c(t) Pewne informacje o uchybie niesie sygnał różnicowy przetwarzany przez sterownik. Przyczyny pojawiania się uchybu: - zakłócenia(na wejściu obiektu sterowanego, pomiarowe) // - skończone wzmocnienie prędkościowe i położeniowe. Uchyb można ograniczyć stosując odpowiedni regulator, poprzez dążenie do jak największego wzmocnienia
15. Stabilny ukł. regulacji automatycznej charakteryzuje się astatyzmem I rzędu, jeżeli posiada skończone i niezerowe wzmocnienie prędkościowe kv≠0 i kv≠∞; kv=lims->0 sGc(s)Gp(s); Transmitancja otwartej pętli G0(s) ukł sterowania o astatyźmie I rzędu posiada pojedynczy biegun w zerze. Dodatkowo ukł ten charakteryz się zerowym wzmocnieniem przyspieszeniowym ka =0.
Oraz: Błąd dla: r(t) = 1(t) = 0 ; r(t)=t*1(t)=1/ kv ; r(t)=(t2/2)*1(t)= ∞.
Przykładowy astatyzm I rzędu: brak astatyzmu:
16. Stosując podany korektor układ zamknięty starci wewnętrzną stabilność. Istnieje bowiem zasada, że korektor nie może eliminować niestabilnych biegunów obiektu (leżących w prawej domkniętej półpłaszczyźnie płaszczyzny zespolonej).
Taki sposób regulacji jest nie dopuszczalny, ponieważ zgodnie z definicją o stabilności wewnętrznej nie może być skreśleń zer z biegunami w prawej półpłaszcz płaszcz zespolonej. Jeżeli nawet byśmy dokonali tego skreślenia to i tak układ posiada biegun w zerze, więc będzie niestabilny. Czyli regulacja jest niedopuszczalna.
17. Dany jest model:
E(s)=k*R(s)-2C(s) // C(s)=E(s)- ((1+sT)/s)*(1/s2(s+1)) stąd
Gre(s)=E(s)/C(s)=k/(1+(2(1+sT)/s)*1/( s2(s+1))) zatem
e(∞)=lims->0 sGre(s)R(s)= lims->0 sGre(s)*1/s= lims->0 (k/( s2(s+1)+2(1+sT)))=0
czyli k,T∈R
18. 1)LP są symetryczne względem osi rzeczywistej płaszczyzny zespolonej
2) LP zaczynają się (dla k=0)w biegunach i kończą (dla k∞)w zerach transmitancji, włączając zera w ∞
3) LP posiadają asymptoty o następujących właściwościach: *asymptoty są półprostymi wychodzącymi z centroid:

*kąt między asymptotami a osią rzeczywistą:
d) LP na osi rzeczywistej mogą leżeć tylko na lewo od nieparzystej liczby punktów kontrolnych (rzeczywistych biegunów i zer transmitancji G0(s), licząc od punktu o największej wartości)
e) punkty wspólne gałęzi LP (punkty spotkania i odejścia) należą do zbioru rozwiązań równania N(s)*D'(s)-N'(s)*D(s)=0 gdzie G0(s)=N(s)/D(s)
f) kąt odejścia LP od danego zespolonego bieguna pi dany jest wzorem
gdzie reprezentuje argument
wektora poprowadzonego od bieguna pj (zera zj) do bieguna pi tej transmitancji
g) kąt odejścia
LP od danego zespolonego zera zi transmitancji dany jest wzorem
gdzie reprezentuje argument wektora prowadzonego od bieguna pj (zera zj) do zera zi tej transmitancji
19. (i) gdy 1+k[L(s)/M(s)] (inaczej - 1+kG0) - pierwiastki M(s)+kL(s)
Jeżeli k=0 to otrzymujemy M(s)=0 zatem LP zaczynają się w biegunach G0 Jeżeli k→nieskończ. to M(s)+kL(s)=0 L(s)=-[M(s)/k] lim(k→nieskończ.)[-M(s)/k]=L(s) zatem LP kończą się w zerach
20. wnioski: - można określić zakres stabilności // - można określić przeregulowania i szybkość układu
21. Aby ukł sterowania był dobrze określony (czyli realizowalny), muszą istnieć wszystkie operatorowe transmitancje zdefiniowane dla zewn sygnałów oraz dla wyróżnionych wewn sygn tego układu. Warunek dobrej określoności można sformułować: mianownik ukł zamkn musi być różny od zera, czyli 1+Gp(s)Gc(s)Gs(s)≠0. Warunek konieczny i wystarczający: wyznacznik 1+Gp(s)Gc(s)Gs(s) nie może być ściśle właściwą, wymierną funkcją zmiennej zespolonej s. Czyli Gp(s)Gc(s)Gs(s)≠-1. Przykład: Gp(s)=(-s+1)/(s+2) // Gc(s)=(s+3)/(s+4) // Gs(s)=(s+5)/(s+6) Gp(s)Gc(s)Gs(s)|s->∞≠-1
22. w dziedzinie czasu: -odp skokowa: h(t)=L-1[G(s)/s] - jest to odp na pobudzenie funkcją skokową (jedynką Haeviside'a) 1(t) przy zerowych war początkowych // -odp impuls: g(t)=L-1[G(s)] - jest to odp na pobudzenie deltą Diraca δ(t) przy zer war pocz. //-czas sterowania(ustalania) - TsΔ //-czas wystąpienia przeregulowania TK (czas maksimum) //-współ tłumienia
w dziedzinie częstotl: -pulsacja drgań tłumionych
//-pulsacja drgań nietłumionych (naturalnych) ωn=1/τ //-pulsacja rezonansowa ωr={ ω: M(ω)=Mmax} M(ω) - amplitudowa char. //3dB pasmo przenoszenia ω3dB={ω:M(ω3dB)=M(0)/sqrt2} //-zapas wzmocnienia Mg,Δg Mg+=20log(kmax/k0) (odporność stabilności zamkniętego ukł regulacji na wzrost odporności parametru k0 ukł otwartego) Mg- =20log(k0/kmin) (odporność stabilności zamkniętego ukł w przypadku spadku wart parametru k0) //-zapas fazy Mp, Δp Mp=Mp(α)=arctan((α-1)/(2*sqrt(α)))
Wskaźnik jakości powinien być tak zdefiniowany, aby mierzył żądane cechy przebiegu przejściowego e(t) z dostateczną dokładnością. Nie może nim być sam uchyb e(t) ponieważ jest on funkcją czasu.
23.
(a) odp skokowa (b) charakter. częstotliwościowe
Jest to człon inercyjny. Pulsacja 3dB pasma przenoszenia członu I rzędu wynosi ω3dB=1/T czemu odpowiadają następujące wart charakterystyki amplitudowej i fazowe tego członu: M(ω3dB)=1/sqrt2=0,707, φ(ω3dB)=-45o
24.
(a) odp skokowa (b) charakter. częstotliwościowe
Jest to człon oscylacyjny. Wskaźniki:
25. Rozważając prosty układ zamknięty: Znamy Gp(s), a szukamy Gc(s) Transmitancja ukł zamkn wynosi:G(s)=(Gc(s)Gp(s))/(1+Gc(s)Gp(s)) Porównujemy transmitancję ukł zamkn z transm wzorcową: Gw(s)=G(s)
(Gc(s)Gp(s))/(1+Gc(s)Gp(s))=(k)/(1+2ζτs+τ2s2) Obliczamy odpowiednie współ k,ζ,τ, a z nich odpowiednie wskaźniki(wcześniejsze zał). Zaprojektowany sterownik musi całkowicie skompensować dynamiczne działanie sterowanego obiektu.
26. po obliczeniach: τ=1/sqrt(k), ζ=1/2sqrt(k) , ωn=1/τ=sqrt(k), ω0=sqrt(1-k)
dla odp skokowej: im większe k tym mniejsze tłumienie i szybszy czas ustalania
dla modułu ukł: M(ω)=( ωn2)/(sqrt((ωn2- ω)2+(2ζωnω)2))=(k)/(sqrt((k-ω)2+(ω2))
27. κ(ζ)=exp((-πζ)/(sqrt(1-ζ2))) maleje eksponentalnie //-Mr(ζ)=1/(2ζsqrt(1-ζ)) maleje nieliniowo //-Tκ(ζ,τ)=(πτ)/( sqrt(1-ζ2)) rośnie nieliniowo // TsΔ(ζ,τ)=(|τ*ln(Δ*sqrt(1-ζ2)))|/(ζ) maleje nieliniowo
//-ω3dB(ζ,τ)=(sqrt(1-2ζ2+sqrt((1-2ζ2) 2+1)))/(τ) malejąca nieliniowo //- ωr(ζ,τ)=(sqrt(1-2ζ2))/(τ) //
28. Zakłada się, że o dynamicznych właściwościach zamkniętego układu sterowania decyduje para sprzężonych biegunów jego transmitancji, położonych na płaszczyźnie zespolonej w obszarze określonym wymaganiami projektowymi dotyczącymi przede wszystkim stabilności. s*=-α*+jβ*=-ζ/τ +j*(sqrt(1-ζ2)/(τ)). Obszar definiuje się jako wspólną część: -półpłaszczyzny leżącej na lewo od s=σ0 σ0=(-ζTsΔ)/(TsΔ)≈(-3/(Ts5%))≈(-4/(Ts2%)) //-stożka wyznaczonego kątami Φκ i -φκ: φκ=arccos(ζ), gdy ζ=(|ln(κ)|)/(sqrt(π2+ln2(κ)))
29.Sygnałowa transmitancja układu zamkn: G(s)=(Gr(s)Gp(s))/(1+Gr(s)Gp(s)) // Transmitancja wzorcowa: Gw(s) Transmitancję sterownika wyznacza się z: (Gr(s)Gp(s))/(1+Gr(s)Gp(s))|Gr(s)=?=Gw(s) Gr(s)=(1/( Gp(s)))*(Gw(s)/(1-Gw(s))) // Wynika więc, że zaprojektowany regulator musi całkowicie skompensować dynamiczne działanie sterowanego obiektu. Takie postepowanie ma ograniczone znaczenie praktyczne ze względu na stabilność i dobrą określoność. Wynika również, że w przypadku obiektu całkującego należałoby stosować różniczkowanie w głównym torze sterowania. Dodatkowo względny rząd transmitancji wzorcowej nie może być mniejszy od wzgl rzędu transmitancji sterowanego obiektu.
30. Jak wiemy, gdy k∞ to pierw transmitancji dążą do zer. Mamy więc ograniczoną regulację, ponieważ dla pewnego k pierwiastki przejdą na prawą półpłaszcz co spowoduje utratę stabilności układu. Dokładność też będzie ogranicz, gdyż zależy od wzmocnienia. Zera funkcji przenoszenia są szkodliwe ze względu na dokładność. W związku z tym musimy ograniczać wzmocnienie, aby układ był stabilny. Zera w prawej półpłaszczyźnie nie pozwalają na stosowanie dużych wzmocnień. Skoro jest ograniczenie nastawu wzmocnienia nie możemy zminimalizować uchybu.
31. Użycie korektora lead poprawia wszystkie własności projektowanego układu sterowania stosunku do układu, w którym znajduje się sterownik proporcjonalny. Użycie korektora lead prowadzi do wzrostu statycznej dokładności oraz poprawienia się zdolności układu zamkn do przeciwdziałania zakłóceniom oddziałującym na sterowany obiekt. Stosując korektor lead nusimy liczyć się z koniecznością zapewnienia większych sygn. Sterujących.
32. Sterownik typu lag zastosowany w układzie sterowania prowadzi do zmniejszenia przeregulowania odp skokowej (astatyzm I i II rzędu). Sterownik niekorzystnie wpływa na czas ustalania odpowiedzi skokowej projektowanego astatycznego układu zamkn. Sterownik pozwala na zmniejszenie ustalonego błędu prędkościowego ale odbywa się to kosztem obniżenia szybkości procesów przejściowych i wzrostu przeregulowania odpowiedzi skokowej.
33. Np.:
35.
- Jeżeli otwarty układ regulacji jest stabilny to zamkn ukł tez jest stab
- jeżeli nie jest stabil(posiada bieguny w prawej półpłaszcz płaszcz zespol)
Z=N+P, gdzie: Z-liczba biegunów zamkn ukł leżących w prawej półpł zespolonej // P - liczba biegunów ukł otwartego należących do prawej półpłaszcz zespolonej // N - liczba okrążeń punktu kontrolnego (-1,j0) zgodnych z ruchem wskazówek zegara przy poruszaniu się wzdłuż charakterystyki Nyquista dla pulsacji ω∈(-∞,+∞).
36. zapas wzmocnienia: Mg=Δg=20log(1/|G0(jωpc)|), gdzie arg(G0(jωpc))=180o
zapas fazy: Mp=Δp=180o+arg(G0(jωgc)), gdzie ωgc=|G0(jωpc)|=1
37. -poprawa własności dynamicznych i statycznych
38. rola członu całkującego: - zwiększa wzmocnienie w zapasie przenoszenia kosztem opóźnienia fazy o π/2 // -zwiększa dokładność //-poprawia uchyb położeniowy. Z linii pierwiastkowych możemy wywnioskować, że układ z członem całkującym jest wolniejszy natomiast dokładniejszy.
40. Metody strojenia PID: strojenie regulatora PID polega na rozbiciu (dekompozycji) zadania projektowego na mniejsze (cząstkowe) automatyczne zadania, w których standardowymi metodami stroimy kolejne nastawy kp,ki,kd. METODY: częstotliwościowa, linii pierwiastkowych, dominujących biegunów.
42. pierwszego rzędu: czasowa - dane aproksymujemy funkcją odpowiedzi skokowej/impulsowej (zależy od danych) naszej transmitancji pierwszego rzędu skokowa h(t)=L-1[Gp(s)/s] // -impulsowa g(t)=L-1[Gp(s)] otrzymujemy odpowiednie parametry naszej transmitancji /// częstotliwościowa - dane aproksymujemy funkcją przenoszenia (transmitancji) odpowiednio: -amplitudowa |G(jω)| // -fazowa arg(G(jω)) ||| drugiego rzędu: czasowa - tak samo, tylko aproksymujemy inną funkcję /// częstotliwościowa - tak samo tylko inna funkcja.
Wyszukiwarka
Podobne podstrony:
przykladowe-zagadnienia, Automatyka
Przykładowe zagadnienia
Seminarium XI przykładowe zagadnienia
Seminarium XIII przykładowe zagadnienia
Wykład VIII Przykłady kodowania automatów asynchronicznycvh II
Wykład III Przykłady kodowania automatów synchronicznych
!!! Zagadnienia, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem, Opracowan
Przykładowe zagadnienia na egzamin z PPP, ZiIP, ZiIP, R2, SI, polimery
Ściąga z automatyki - zagadnienia, automatyka, Ściąga
LASERY zagadnienia, Automatyka, Lasery
Przykładowe zagadnienia do egzaminu z przedmiotu - Psychologia osób niepełnosprawnych, Pomoce naukow
Seminarium VIII przykładowe zagadnienia
Seminarium V przykładowe zagadnienia
Seminarium X przykładowe zagadnienia
Zarządzanie Strategiczne – przykładowe zagadnienia (2)
przykladowe zagadnienia na egzamin, gr D (BSW), fizjologia-testy, testy
Uskom przykładowe zagadnienia na zaliczenie
Przykładowe zagadnienia na egzamin z historii politycznej Polski XXw sciaga
Seminarium VI przykładowe zagadnienia
więcej podobnych podstron