SiLNIKI KROKOWE
Zasada działania silników krokowych
Na rysunku 2.1 przedstawiono zasadę działania silnika krokowego na przykładzie silnika z wirnikiem czynnym.
Rys 2.1. Zasada działania silnika krokowego. [5]
Przy zasilaniu kolejnych cewek stojana napięciem, strumień stojana, a więc i wirnik, będą zajmowały kolejno 4 takie położenia (zilustrowane na rysunku 2.1), w których występuje zgodność strumieni magnesów wirnika i uzwojenia stojana. Jest to czterotaktowy cykl komutacji, po którym wirnik wróci do sytuacji wyjściowej.
Kąt skoku w mierze elektrycznej jest tym mniejszy, im większa jest liczba taktów komutacji k w cyklu i wynosi: ![]()
. Zmniejszać skok można bądź na drodze konstrukcyjnej, bądź na drodze elektrycznej. [5]
Czym większa prędkość obrotowa silnika krokowego, tym jest on słabszy. Wynika to z kilku przyczyn. Rysunek 2.2 pokazuje uproszczoną charakterystykę silnika. Na osi poziomej zaznaczona jest częstotliwość impulsów sterujących określających prędkość obrotową, na pionowej - moment obrotowy, który określa siłę. Punkt A pokazuje maksymalną częstotliwość rozruchu. Przy większej częstotliwości silnik w ogóle nie ruszy. Jeśli jednak silnik ruszy przy mniejszej prędkości, można go stopniowo rozpędzić do prędkości większej. Punkt B wyznacza maksymalną prędkość silnika. Większej nie da się osiągnąć. Punkty A i B mają małe znaczenie praktyczne, ponieważ dotyczą silnika nieobciążonego. Jeśli silnik ma ruszyć i to od razu pod obciążeniem, trzeba zacząć od mniejszej prędkości - pokazuje to przykładowy punkt C. Jeśli już silnik zacznie pracować, można stopniowo zwiększyć jego prędkość aż do wartości wyznaczonej przez punkt D.[3]
Rys. 2.2. Charakterystyki momentu silnika skokowego w funkcji prędkości. [3]
Uproszczona charakterystyka z rysunku 2.2a nie pokazuje wszystkich właściwości silnika. Wspomniane wcześniej rezonanse mechaniczne spowodują, że przy sterowaniu pełnokrokowym dla pewnej częstotliwości impulsów silnik w ogóle nie będzie pracował. Pokazuje to, znów w uproszczeniu, rysunek 2.2b. Dokładnej charakterystyki nie sposób podać, bo częstotliwość rezonansu mechanicznego zależy nie tylko od silnika, ale i od obciążenia. Charakterystyka będzie dużo gładsza przy sterowaniu półkrokowym, tym bardziej przy mikrokrokowym. W każdym razie w prawidłowo zaprojektowanym systemie albo rezonanse są zmniejszone (wyeliminowane), albo zakres częstotliwości roboczych jest mniejszy i nie grozi wpadnięciem w taki obszar. [3]
Istotnym zagadnieniem w pracy układu napędowego z silnikiem skokowym jest analiza i odpowiedni dobór stałej elektromechanicznej TM układu. Przebieg w czasie drogi kątowej wirnika silnika skokowego będzie zależał zarówno od częstotliwości impulsów prądu zasilania, jak i od stałej TM co ilustruje rysunek 2.3.
Rys. 2.3. Przebieg w czasie drogi kątowej wirnika silnika skokowego. [2]
Częstotliwość pracy silnika skokowego oraz odpowiadający jej przebieg drogi kątowej muszą być dokładnie przeanalizowane w kontekście przewidywanego zastosowania silnika, ponieważ w wielu przypadkach oscylacyjny przebieg drogi kątowej α (rysunek 2.3) jest nie do przyjęcia z punktu widzenia wymagań mechanizmu napędzanego [2].
W takim przypadku pomocne może być zastosowanie sterowania półkrokowego albo mikrokrokowego.
Rodzaje silników krokowych
Obecnie istnieje duża liczba różnorodnych typów silników krokowych. Na rysunku 2.4 przedstawiono podział silników krokowych ze względu na ich budowę.
Podstawowymi rodzajami wirujących silników krokowych są silniki z magnesem stałym, silniki o zmiennej reluktancji oraz silniki hybrydowe - te trzy typy silników zostały omówione dokładniej poniżej. Silnikiem z innej rodziny silników krokowych są liniowe silniki krokowe, które dokładniej zostały omówione w podrozdziale 2.2.4.
Rys.2.4. Podział rodzajów silników. [12]
Silniki krokowe z magnesami trwałymi
Silniki krokowe z magnesami stałymi mogą być wykonane w wersji jednosegmentowej i wielosegmentowej. Silnik jednosegmentowy może mieć na wirniku podobnie do klasycznej maszyny synchronicznej bieguny jawne lub utajone. Na rysunku 2.5 przedstawiono silnik z biegunami jawnymi, natomiast na rysunku 2.6 przedstawiono silnik z biegunami utajonymi [11].
Silniki krokowe o magnesach trwałych na wirniku można również podzielić na magnesowane osiowo lub promieniowo. Silnik krokowy o wirniku czynnym często nazywany jest również silnikiem kubkowymi. Jest to silnik o wirniku wytwarzającym strumień magnetyczny i o stojanie z uzwojeniem sterującym. Wirnik silnika stanowią magnesy trwałe. Silnik tego typu są tanie, charakteryzują się niską rozdzielczością o typowych wartościach kąta 7,50 - 150 tj. 24 - 48 kroków na obrót. Rotor silnika nie posiada zębów, lecz jest namagnesowany naprzemiennie biegunami N i S tak, iż bieguny te są usytuowane w linii prostej równoległej do osi rotora.
Namagnesowane bieguny rotora wpływają na zwiększenie indukcji magnetycznej, dlatego silniki z magnesem trwałym w porównaniu z silnikami o zmiennej reluktancji mają lepszą charakterystykę momentową.
Silniki o zmiennej reluktancji
Oprócz szeroko stosowanych jednosegmentowych silników krokowych często bywają stosowane silniki wielosegmentowe. Wśród jednosegmentowych silników krokowych o wirniku reluktancyjnym rozróżnić można takie, w których na jeden biegun stojana przypada jeden ząb wirnika i takie, w których na jeden biegun stojana przypada kilka zębów wirnika.
Obydwie odmiany mogą być wykonana w wariancie symetrycznym bądź niesymetrycznym. W budowie symetrycznej uzwojenia dwóch przeciwległych biegunów tworzą pasmo, natomiast budowa niesymetryczna charakteryzuje się tym, że całe uzwojenie jednego pasma jest umieszczone na jednym biegunie. Działanie silnika skokowego o wirniku reluktancyjnym opiera się na wykorzystaniu momentu reluktancyjnego. Silnik ten składa się z rotora o wielu zębach wykonanego z miękkiej stali i uzwojonego stojana. Kiedy uzwojenia stojana są zasilane stałym prądem, bieguny namagnesowują się. Ruch pojawia się na skutek przyciągania zębów rotora przez zasilane bieguny stojana. Zasadę działania przedstawia rysunek 2.7.
Rys 2.7. Zasada działania silnika krokowego o zmiennej reluktancji. [12]
Strumień w obwodzie magnetycznym opisany jest zależnością 1.
f = IZ / Rm (1)
i jest funkcją przepływu Iz oraz reluktancji. Linie pola magnetycznego wykazują dążenie do zamknięcia w obwodzie o najmniejszej reluktancji. W ten sposób powstaje moment obrotowy, który dąży do ustawienia wirnika w położeniu q = 0.
Silniki hybrydowe
Silniki hybrydowe są najnowocześniejszym typem silników krokowych. Silnik hybrydowy jest bardziej kosztownym niż silnik z magnesem trwałym cechuje się za to lepszymi parametrami, jeśli chodzi o rozdzielczość i szybkość. Zasada działania silnika opiera się na tym, że magnes trwały umieszczony na wirniku lub na stojanie wytwarza jednako biegunowy strumień magnetyczny, który zamyka się w obwodzie magnetycznym: stojan - szczelina powietrzna -wirnik. Po zasileniu uzwojenia stojana impulsem sterującym, wzbudzony strumień magnetyczny pod jednym biegunem stojana dodaje się do strumienia magnesów trwałych, pod drugim zaś odejmuje się. Wirnik zostaje wprowadzony w ruch tak, by osie zębów stojana i wirnika bieguna o strumieniu wzmacniającym pole magnetyczne pokryły się.
Typowe kąty silnika hybrydowego mieszczą się w zakresie 3,6 - 0,9 tj. 100 - 400 kroków na obrót. Silnik hybrydowy łączy w sobie zalety silnika ze zmienną reluktancją i silnika z magnesem stałym. Wirnik silnika ma wiele zębów i posiada osiowo namagnesowane magnesy umieszczone koncentrycznie wokół osi. Budowa silnika hybrydowego została przedstawiona na rysunku 2.8.
Rys. 2.8. Budowa silnika hybrydowego. [9]
Zęby rotora zapewniają lepszą drogę przepływowi magnetycznemu, co polepsza charakterystyki momentu spoczynkowego i dynamicznego w porównaniu z silnikami z magnesem stałym i reluktancyjnym.
Krokowe silniki liniowe
Najczęściej stosowane są liniowe silniki skokowe reluktancyjne i hybrydowe, znacznie rzadziej elektrodynamiczne. Liniowy reluktancyjny silnik krokowy jest odpowiednikiem wielosegmentowego wirującego reluktancyjnego silnika skokowego. Rdzeń stojana i nabiegunniki są wykonane z blachy elektrotechnicznej. Hybrydowy, liniowy silnik krokowy składa się z ruchomego biegunnika i nieruchomego stojana. Stojan stanowi uzębiona płyta z materiału ferromagnetycznego. Część ruchoma składa się z dwu rdzeni ferromagnetycznych, pomiędzy którymi znajduje się magnes trwały. Na każdym rdzeniu znajduje się uzwojenie. Rdzenie mają zęby, które znajdują się w takiej odległości od siebie, by odpowiadały podziałce zębowej stojana. Zaletą liniowego silnika skokowego jest bezpośrednia zamiana impulsowych sygnałów wejściowych na przemieszczenie liniowe. Stwierdzono, że liniowe silniki skokowe mają większą dokładność i sprawność oraz lepsze charakterystyki dynamiczne w porównaniu silnikami krokowymi z wirującymi wałami w połączeniu z mechanizmami przetwarzania ruchu obrotowego na postępowy.
Sposoby sterowania silnikami krokowymi
Przy opisywaniu sposobów sterowania silnikami krokowymi można wyróżnić dwa podziały ze względu na sposób sterowanie silnikami. Pierwszy z nich dotyczy sposobu zasilania uzwojeń silnika - na unipolarne i bipolarne. Podział ten został bliżej opisany poniżej. Drugi podział związany jest ze sposobem, w jaki jest modelowany sygnał zasilający silnik. Ten podział zawiera w sobie następujące rodzaje sterowania:
sterowanie jednofazowe (falowe)
pełnokrokowe
półkrokowe
mikrokrokowe
Rodzaje te zostały omówione w kolejnych podrozdziałach.
Silniki unipolarne i bipolarne
Wśród silników krokowych można wyróżnić dwa podstawowe typy: unipolarne i bipolarne. Silnik bipolarny o dwóch fazach ma jedno uzwojenie na fazę, natomiast unipolarny ma jedno uzwojenie z odczepem pośrodku. Istnieją także silniki wyposażone w dwa uzwojenia na fazę. Mogą one pracować zarówno w trybie unipolarnym jak i bipolarnym. Na rysunku 2.9 przedstawiono różnice w budowie pomiędzy silnikami unipolarnymi a bipolarnymi.
Rys. 2.9. Budowa silnika: a) unipolarnego, b) bipolarnego. [11]
Przy sterowaniu bipolarnym całe pasmo uzwojenia bierze udział w pracy w danym momencie, natomiast przy sterowaniu unipolarnym w danym momencie jest włączona połowa pasma.
W silniku bipolarnym do zmiany pola magnetycznego w rdzeniu wystarcza jeden przełącznik dwupozycyjny, lub dwa tranzystory włączane na przemian. W przypadku silnika unipolarnego do kluczowania prądu wystarczy jeden tranzystor na fazę. Sterowanie unipolarne zapewnia przepływ prądu w danym uzwojeniu tylko w jednym kierunku, podczas gdy sterowanie bipolarne zapewnia przepływ prądu w dwóch kierunkach. Zaletą wariantu unipolarnego jest prostszy układ połączeń i mniejsza liczba tranzystorów, wadą zaś to, że jednocześnie pracuje tylko połowa uzwojenia, a zatem nie wytwarza się moment obrotowy o pełnej wartości. Zaletą sterowani bipolarnego jest dobre wykorzystanie momentu obrotowego dzięki temu, że całe uzwojenie jest w stanie prądowym po otrzymaniu impulsu.
Silniki bipolarne wymagają bardziej rozbudowanego układu sterowania, co zostało zobrazowane na rysunku 2.10.
Rys. 2.10. Sposoby sterowania silnika: a) unipolarnego b) bipolarnego. [11]
Sterowanie pełnokrokowe (jednofazowe)
W sterowaniu pełnokrokowym (jednofazowym) w danym momencie zasilana jest tylko jedna faza. W przypadku silnika dwufazowego stojan jest zasilany zgodnie z sekwencją A C B D. Wynikiem tego rodzaju sterowania jest wykonanie pełnego kroku. Na rysunku 2.11 zostało przedstawione położenie wału silnika w zależności od kroku.
Rys. 2.11. Położenie wału silnika dla pracy jednofazowej [11]
Przy pracy pełnokrokowej w danym momencie zasilane jest tylko jedno uzwojenie - na rysunku 2.12 pokazano sekwencję załączeń, oraz przebiegi sterujące dla poszczególnych uzwojeń przy sterowaniu falowym.
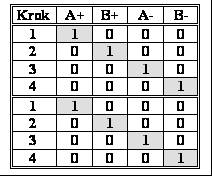
Rys. 2.12. Tabela załączeń oraz przebiegi sterujące przy sterowaniu falowym [3]
Dla silników o uzwojeniach unipolarnych i bipolarnych przy takich samych parametrach uzwojeń taki sposób zasilania wywołuje te same położenie mechaniczne. Wadą takiego sposobu sterowania jest to, że silniki o uzwojeniach unipolarnych wykorzystują tylko 25%,a o uzwojeniach bipolarnych 50% całkowitego uzwojenia silnika w danej chwili czasu. Oznacza to, że nie wykorzystuje się maksymalnego momentu wyjściowego silnika.
Sterowanie pełnokrokowe (dwufazowe)
W sterowaniu dwufazowym inaczej pełnokrokowym w każdej chwili czasu zasilane są dwie fazy stojan jest zasilany zgodnie z sekwencją AC CB BD DA. Wynikiem tego rodzaju sterowania są takie same ruchy jak przy sterowaniu jednofazowym z tym, że pozycja wirnika jest przesunięta o pół kroku - zostało to pokazane na rysunku 2.13.
Rys.2.13. Położenie wału silnika dla pracy dwufazowej.[11].
Na rysunku 2.14 przedstawiono tablicę załączeń oraz przebiegi sterujące dla tego rodzaju sterowania.
Rys. 2.14. Tabela załączeń oraz przebiegi sterujące przy sterowaniu pełnokrokowym, dwufazowym [3]
Sterowanie półkrokowe
Sterowanie półkrokowe jest kombinacją sterowania dwufazowego i jednofazowego. Co drugi krok jest zasilana tylko jedna faza, a w pozostałych krokach zasilane są dwie fazy. Stojan silnika dwufazowego jest zasilany zgodnie z sekwencją A AC C CB B BD D DA. Wynikiem tego są obroty wirnika równe połowie tych ze sterowania z jedną lub dwiema fazami włączonymi. Sterowanie pół krokowe może zredukować efekt rezonansu mechanicznego, który ujawnia silnie w dwóch poprzednich rodzajach sterowania. Poszczególne fazy położenia wirnika zostały pokazane na rysunku 2.15.
Rys.2.15. Położenia wału silnika dla pracy ze sterowaniem półkrokowym [11]
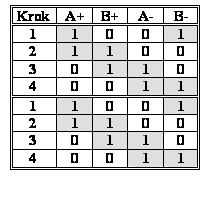
Przy sterowaniu półkrokowym wymagane jest naprzemienne zasilanie jednego z uzwojeń, a następnie dwóch uzwojeń silnika krokowego. Przebiegi sterujące zostały przedstawione na rysunku 2.16.

Rys. 2.16. Tabela załączeń oraz przebiegi sterujące przy sterowaniu półkrokowym [3]
Sterowanie mikrokrokowe
W sterowaniu mikrokrokowym prądy w uzwojeniach zmieniają się płynnie rozbijając w ten sposób pełen krok na wiele mniejszych tak zwanych mikrokroków. Praca z mikrokrokiem polega na obracaniu polem magnetycznym stojana w sposób bardziej płynny niż w sterowaniu pełno i półkrokowym. Powoduje to mniejsze drgania i umożliwia bezszumowe poruszanie silnika do poziomu częstotliwości 0 Hz. Dzięki pracy z mikrokrokiem możliwe jest uzyskanie dokładniejszego pozycjonowania. Istniej wiele różnych typów mikrokroku o podziale od 1/3 do 1/32 pełnego kroku lub jeszcze mniejszym.
Silnik krokowy jest silnikiem synchronicznym. Oznacza to, że stabilne położenia zatrzymania wirnika jest zsynchronizowane z polem magnetycznym stojana. Obroty wirnika uzyskuje się przez obracanie pola, wirnik podąża do nowego położenia stabilnego. Moment M wytwarzany przez silnik jest funkcją momentu spoczynkowego Ms i odległości pomiędzy polem magnetycznym stojana a pozycją wirnika Qp został przedstawiony zależnością (2).[7]
M = Ms · sin(Qs - Qr) (2)
gdzie:
Qs i Qr są wyrażone w stopniach elektrycznych.
Zależność między kątami mechanicznymi i elektrycznymi dana jest wzorem 3:
Qel = (n/4) Qmech (3)
gdzie:
n - oznacza ilość kroków na obrót
Kiedy silnik sterowany jest w sposób pełno lub półkrokowy, pole magnetyczne stojana obraca się o odpowiednio 90o i 45o stopni elektrycznych na każdy krok silnika. Z zależności (3) widać, że w silniku powstaje moment pulsujący. Dzieje się tak, dlatego, że Qs i Qr nie są stałe w czasie ze względu na nieciągłe zmiany Qs.
Wytwarzanie momentu obrotowego o 45º i 90º jest proste, gdyż potrzebne są tylko dwa stany załączenia prądu: włączony i wyłączony. Aby zapewnić pracę mikrokrokową silnika trzeba zapewnić taki układ sterowania, który wytworzy sygnały o poziomach pośrednich pomiędzy maksymalną i minimalną wartością sygnału źródła. Dzięki takiemu wymuszeniu prądy w pasmach silnika wytwarzają wektor strumienia magnetycznego, którego położenie w przestrzeni jest określone przez wartość tych prądów.
Dla danego kierunku pola magnetycznego stojana poziomy prądu odpowiadające temu kierunkowi można obliczyć z wzorów (4) oraz (5):
IA = I max · sin Qs (4)
IA = I max · cos Qs (5)
Używając różnych wartości Ion oraz 0 w obu uzwojeniach możemy uzyskać 8 różnych kombinacji prądów w uzwojeniach. To daje osiem pozycji, przy których włączona jest jedna bądź dwie fazy odpowiadających kierunkom indukcji magnetycznej od 0,45 do 315 stopni elektrycznych. Jest zatem możliwe wybranie dowolnego kąta elektrycznego kroku np. ¼ ,1/8 ,1/32. [7]
Na rysunku 2.17 przedstawiono przebieg sygnałów sterujących przy sterowaniu mikrokrokowym.
Rys. 2.17 Przebieg sterujący przy sterowaniu mikrokrokowym [9]
W zależności od typu sterownika można napotkać różne kształty sygnału sterującego. Na rysunku 2.18 zostały przedstawione przykładowe przebiegi sterujące napięciem fazy silnika krokowego.
Rys. 2.18. Przykładowe przebiegi sterujące napięciem fazy silnika przy sterowaniu mikrokrokowym a) przebieg sinusoidalny, b) przebieg „wypełniony”, c) przebieg „trójkątny”
Rys. 2.5. Silnik z biegunami jawnymi. [12]
Rys. 2.6. Silnik z biegunami utajonymi. [12]
on
Wyszukiwarka
Podobne podstrony:
Układy sterowania silnikami elektrycznymi
badanie silnika krokowego, mechanika, BIEM- POMOCE, automatyka i sterowanie
209 układy sterowania silnikami JBZ2Z2BZ7CS6T5ZAF22SVX5BZP2W7C2D763IN7A
Najprostszy sterownik silników krokowych, ELEKTRONIKA
dudziński,układy napędowe,Układy sterownia silnika
2005 02 Sterownik silnika krokowego
2005 09 Sterownik silnika krokowego
Wykorzystanie bramek mocy do sterowania silnika krokowego, ZSE nr
podstawy sterowania silnikami krokowymi cziii LW4UI5JIORSYVSGPT4E25HEC6P25JSSQIZYDF7Y
podstawy sterowania silnikami krokowymi czii UMY4BWPPWLXRIMFWEJEHJLHDOJOZ4OQ5AVNYGBI
sterownik silnika krokowego
1997 07 Sterownik dwufazowych silników krokowych
Sterownik silnika krokowego 2
2005 02 Sterownik silnika krokowego
HB205SN sterownik silników krokowych 2 fazowych
Silniki krokowe i sterowanie portem LPT OCForum
2005 09 Sterownik silnika krokowego
więcej podobnych podstron