2tom130
5. MASZYNY ELEKTRYCZNE 262
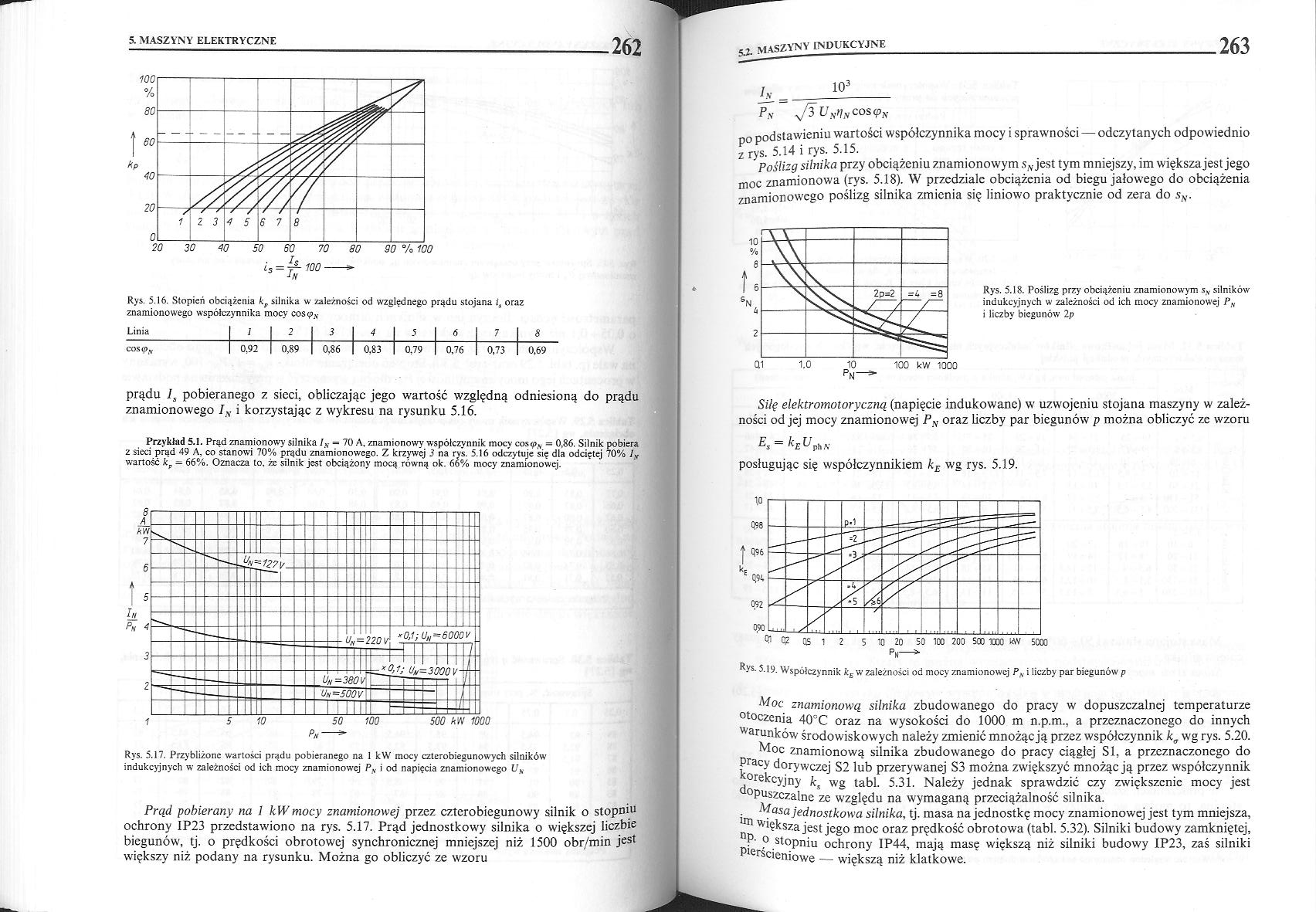
Rys. 5.16. Stopień obciążenia kp silnika w zależności od względnego prądu stojana i, oraz znamionowego współczynnika mocy cos <pA.
|
Linia |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
1 8 |
|
cos q>N |
1 0,92 |
1 0,89 |
1 0,86 |
1 0,83 |
1 0,79 |
1 0,76 |
1 0,73 |
1 0,69 |
prądu Is pobieranego z sieci, obliczając jego wartość względną odniesioną do prądu znamionowego IN i korzystając z wykresu na rysunku 5.16.
Przykład 5.1. Prąd znamionowy silnika Is = 70 A, znamionowy współczynnik mocy cos<piV = 0,86. Silnik pobiera z sieci prąd 49 A, co stanowi 70% prądu znamionowego. Z krzywej 3 na ryś. 5.16 odczytuje się dla odciętej 70% /v wartość kp - 66%. Oznacza to, że silnik jest obciążony mocą równą ok. 66% mocy znamionowej.
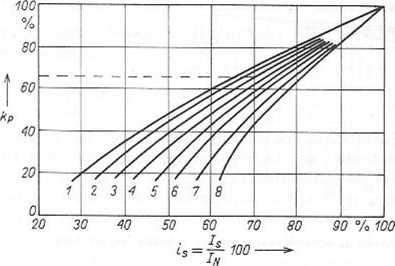
Rys. 5.17. Przybliżone wartości prądu pobieranego na 1 kW mocy czterobiegunowych silników indukcyjnych w zależności od ich mocy znamionowej Ps i od napięcia znamionowego Uh
Prąd pobierany na I kW mocy znamionowej przez czterobiegunowy silnik o stopniu ochrony IP23 przedstawiono na rys. 5.17. Prąd jednostkowy silnika o większej liczbie biegunów, tj. o prędkości obrotowej synchronicznej mniejszej niż. 1500 obr/min jest większy niż podany na rysunku. Można go obliczyć ze wzoru
Ps V;T L'v^.vcos<piV
no podstawieniu wartości współczynnika mocy i sprawności — odczytanych odpowiednio i rys. 5.14 i rys. 5.15.
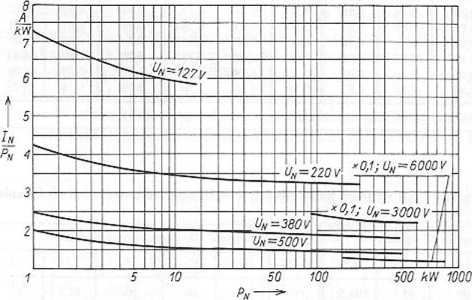
Poślizg silnika przy obciążeniu znamionowym slVjest tym mniejszy, im większa jest jego moc znamionowa (rys. 5.18). W przedziale obciąż.enia od biegu jałowego do obciążenia znamionowego poślizg silnika zmienia się liniowo praktycznie od zera do ss.
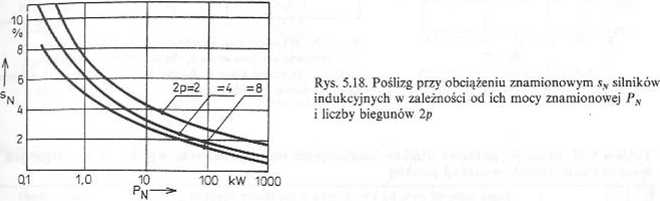
Silę elektromotoryczną (napięcie indukowane) w uzwojeniu stojana maszyny w zależności od jej mocy znamionowej Ps oraz liczby par biegunów p można obliczyć ze wzoru
Ps = phK
posługując się współczynnikiem kE wg rys. 5.19.
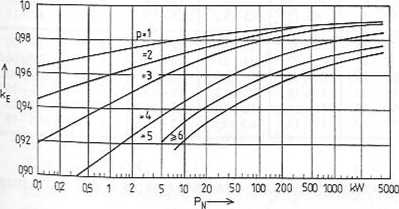
Rys- Współczynnik kE w zależności od mocy znamionowej P, i liczby par biegunów p
Moc znamionową silnika zbudowanego do pracy w dopuszczalnej temperaturze otoczenia 40°C oraz na wysokości do 1000 m n.p.m., a przeznaczonego do innych warunków środowiskowych należy zmienić mnożąc ją przez współczynnik k„ wg rys. 5.20.
Moc znamionową silnika zbudowanego do pracy ciągłej SI, a przeznaczonego do Pracy dorywczej S2 lub przerywanej S3 można zwiększyć mnożąc ją przez współczynnik rekcyjny wg tabl. 5.31. Należy jednak sprawdzić czy zwiększenie mocy jest Pttszczalne ze względu na wymaganą przcciążalność silnika, im •asa Jednostkowa silnika, tj. masa na jednostkę mocy znamionowej jest tym mniejsza, Wlększa jest jego moc oraz prędkość obrotowa (tabl. 5.32). Silniki budowy zamkniętej, ?■ ? s*opniu ochrony IP44, mają masę większą niż silniki budowy IP23, zaś silniki Cr$cieniowe — większą niż klatkowe.
Wyszukiwarka
Podobne podstrony:
Str312 (2) L, Rys. 16.1.4. Połączenie wałów reduktora i silnika elektrycznego 2. POWIERZCHNIE OPOROW
Image175 ■ To warto wiedzieć ■ To warto wiedzieć fSI Elektroda górna Elektroda dolna Rys. 16 i Rys.
Rys. 16.4.4 382 Oś wału silnika elektrycznego V r-*- Charakterystyka techniczna Pse
IMG00312 312 Rys. 16.1.4. Połączenie wałów reduktora i silnika elektrycznego2. POWIERZCHNIE OPOROWE
2tom124 5. MASZYNY ELEKTRYCZNE 250 5. MASZYNY ELEKTRYCZNE 250 Rys. 5.8. Schemat zastępczy maszyny in
2tom131 5. MASZYNY ELEKTRYCZNE264265 Tablica 5.31. Współczynnik zwiększenia mocy silników przeznaczo
2tom132 5. MASZYNY ELEKTRYCZNE 266 gdzie: ap — liczba pierścieni ślizgowych w maszynie; vp — prędkoś
2tom133 5. MASZYNY ELEKTRYCZNE Tablica 5.33. Dane techniczne rozruszników olejowych serii ARf i ARd
2tom134 5. MASZYNY ELEKTRYCZNE 270 Za pomocą przełącznika gwiazda-trójkąt załącza się tylko silniki
2tom135 5. MASZYNY ELEKTRYCZNE 272 a) b) O
2tom136 5. MASZYNY ELEKTRYCZNE 274 Regulacja za pomocą rezystancji w obwodzie wirnika może być stos
2tom137 5. MASZYNY ELEKTRYCZNE 276 Przy tym sposobie hamowania prędkość obrotowa urządzenia napędzan
2tom138 5. MASZYNY ELEKTRYCZNE 278 w wirniku oraz Ras w stojanie można wpływać zarówno na pochylenie
2tom139 5. MASZYNY ELEKTRYCZNE 280 Połączenia Y,/D„ oraz D, / Y,2, są stosowane w silnikach o zbliżo
2tom149 5. MASZYNY ELEKTRYCZNE 300 Rys. 5.38. Schemat połączeń uzwojeń indukcyjnego regulatora
więcej podobnych podstron