2tom210
5. MASZYNY ELEKTRYCZNE 422
(tzw. kąt histerezy) o jaki pierwsza harmoniczna strumienia opóźnia się względem wywołującego go prądu i z kolei obliczyć moment histerezowy.
Moment histerezowy, niezależny od prędkości wirnika, wg [5.20] jest określony wzorem
(5.185) w którym *Plmax— maksymalny strumień skojarzony.
Permasyny
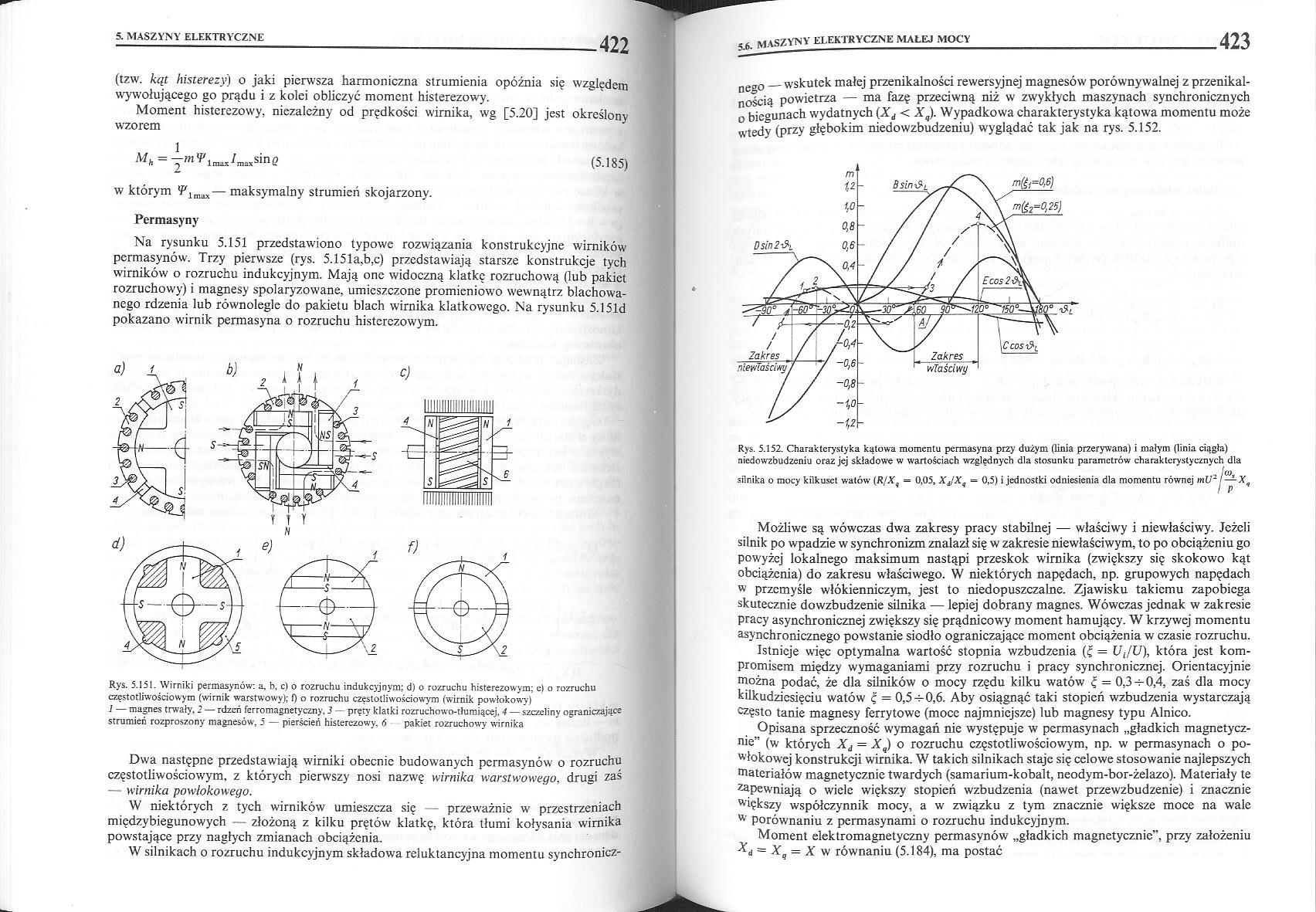
Na rysunku 5.151 przedstawiono typowe rozwiązania konstrukcyjne wirników permasynów. Trzy pierwsze (rys. 5.151a,b,c) przedstawiają starsze konstrukcje tych wirników' o rozruchu indukcyjnym. Mają one widoczną klatkę rozruchową (lub pakiet rozruchowy) i magnesy spolaryzowane, umieszczone promieniowo wewnątrz blachowa-nego rdzenia lub równolegle do pakietu blach wirnika klatkowego. Na rysunku 5.151d pokazano warnik permasyna o rozruchu histerczowym.
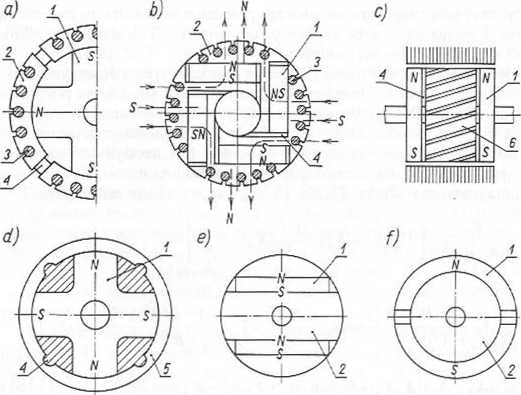
Rys. 5.151. Wirniki permasynów: a, b, c) o rozruchu indukcyjnym; d) o rozruchu histerezowym; c) o rozruchu częstotliwościowym (wirnik warstwowy); f) o rozruchu częstotliwościowym (wirnik powłokowy)
1 — magnes trwały, 2 — rdzeń ferromagnetyczny, 3 — pręty klatki rozruchowo-tłurniącej. 4 — szczeliny ograniczające strumień rozproszony magnesów, 5 — pierścień histerezowy. 6 pakiet rozruchowy wirnika
Dwa następne przedstawiają wirniki obecnie budowanych permasynów o rozruchu częstotliwościowym, z których pierwszy nosi nazwę wirnika warstwowego, drugi zas — wirnika powłokowego.
W niektórych z tych wirników umieszcza się — przeważnie w przestrzeniach międzybiegunowych — złożoną z kilku prętów klatkę, która tłumi kołysania wirnika powstające przy nagłych zmianach obciążenia.
W silnikach o rozruchu indukcyjnym składowa reluktancyjna momentu synchronicz-
0_wskutek małej przenikalności rewersyjnej magnesów porównywalnej z przenikal-
nością powietrza — ma fazę przeciwną niż w zwykłych maszynach synchronicznych o biegunach wydatnych (Xd < Xq). Wypadkowa charakterystyka kątowa momentu może wtedy (przy głębokim niedowzbudzeniu) wyglądać tak jak na rys. 5.152.
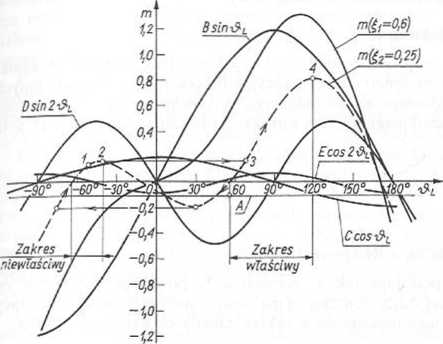
Rys. 5.152. Charakterystyka kałowa momentu permasyna przy dużym (linia przerywana) i małym (linia ciągła) niedowzbudzeniu oraz jej składowe w wartościach względnych dla stosunku parametrów charakterystycznych dla
silnika o mocy kilkuset watów (RfX. = 0,05, XJX.
im
■■ 0,5) i jednostki odniesienia dla momentu równej mU2 —Xq
Możliwe są wówczas dwa zakresy pracy stabilnej — właściwy i niewłaściwy. Jeżeli silnik po wpadzie w synchronizm znalazł się w zakresie niewłaściwym, to po obciążeniu go powyżej lokalnego maksimum nastąpi przeskok wirnika (zwiększy się skokowo kąt obciążenia) do zakresu właściwego. W niektórych napędach, np. grupowych napędach w przemyśle włókienniczym, jest to niedopuszczalne. Zjawisku takiemu zapobiega skutecznie dowzbudzenie silnika — lepiej dobrany magnes. Wówczas jednak w zakresie pracy asynchronicznej zwiększy się prądnicowy moment hamujący. W krzywej momentu asynchronicznego powstanie siodło ograniczające moment obciążenia w czasie rozruchu.
Istnieje więc optymalna wartość stopnia wzbudzenia (ę = UJU), która jest kompromisem między wymaganiami przy rozruchu i pracy synchronicznej. Orientacyjnie można podać, że dla silników o mocy rzędu kilku watów ć = 0,3 ^-0,4, zaś dla mocy kilkudziesięciu watów £ = 0,5-^0,6. Aby osiągnąć taki stopień wzbudzenia wystarczają często tanie magnesy ferrytowe (moce najmniejsze) lub magnesy typu Alnico.
Opisana sprzeczność wymagań nie występuje w pcrmasynach „gładkich magnetycznie” (w których Xd = Xq) o rozruchu częstotliwościowym, np. w permasynach o powłokowej konstrukcji wirnika. W takich silnikach staje się celowe stosowanie najlepszych materiałów magnetycznie twardych (samarium-kobalt, neodym-bor-żelazo). Materiały te zapewniają o wiele większy stopień wzbudzenia (nawet przewzbudzenie) i znacznie większy współczynnik mocy, a w związku z tym znacznie większe moce na wale w porównaniu z permasynami o rozruchu indukcyjnym.
Moment elektromagnetyczny permasynów „gładkich magnetycznie”, przy założeniu = Xq = X w równaniu (5.184), ma postać
Wyszukiwarka
Podobne podstrony:
2tom215 5. MASZYNY ELEKTRYCZNE 432 że w granicznym przypadku wirnik silnika skokowego może opóźnić s
2tom216 5. MASZYNY ELEKTRYCZNE 434 Silniki skokowe o magnesach trwałych charakteryzuje stosunkowo du
2tom211 5. MASZYNY ELEKTRYCZNE 424 M. = — /vR2y + XL2 VA~ ViR+UXdsin9L+ URcosSL)
2tom212 5. MASZYNY ELEKTRYCZNE 426 Redukcja prędkości wirnika w stosunku do prędkości synchronicznej
2tom213 5. MASZYNY ELEKTRYCZNE 428 Tablica 5.79. Dane techniczne mikrosilników synchronicznych jedno
2tom214 5. MASZYNY ELEKTRYCZNE 430 5. MASZYNY ELEKTRYCZNE 430 Rys. 5.159. Sposób połączenia uzwojeni
2tom217 5. MASZYNY ELEKTRYCZNE 436 przyspieszonej, w którym co prawda silnik nadąża za powolnymi zmi
2tom218 5. MASZYNY ELEKTRYCZNE System powstawania maszyn elektrycznych reprezentuje etap konstruowan
2tom219 5. MASZYNY ELEKTRYCZNE 440 i---- Etap powstawania mo
Maszyna elektryczna Herman Hollerith (1860-1929) - jako pierwszy sięgnął po elektryczność, jako źród
2tom179 5. MASZYNY ELEKTRYCZNE 360 n, do tt„ux za pomocą zmniejszania strumienia magnetycznego i jed
- 25 - KOZŁOWSKA ALICJA Kat. Maszyn Elektrycznych i Transformatorów 171. Metoda wyznaczania rozkładu
2tom163 5. MASZYNY ELEKTRYCZNE uwzględniając początkowy moment rozruchowy MIATr,jaki powinien być ro
2tom191 5. MASZYNY ELEKTRYCZNE 384 Jeżeli <5 oznacza kąt zawarty miedzy osią szczotek a osią magn
Moduł 724[01].Z3 Maszyny elektryczne i układy napędowe 216 724[01].Z3.01 Eksploatowanie
więcej podobnych podstron