2tom216
5. MASZYNY ELEKTRYCZNE 434
Silniki skokowe o magnesach trwałych charakteryzuje stosunkowo duży kąt skoku podstawowego, ze względu na wzrost strumienia rozproszonego magnesów przy zwiększaniu p. Najczęściej są to skoki 15" lub 7" 30'. Silniki te mają za to momenty wydawane znacznie większe niż reluktancyjne, większe współczynniki tłumienia oscylacji wirnika (istnieje bowiem stałe podmagnesowanie obwodu strumieniem magnesów) i zdolność „zapamiętywania” położenia po wyłączeniu zasilania (skutkiem polaryzacji wirnika i uzębienia stojana). Silniki reluktancyjne, szczególnie reduktorowe, można natomiast budować na bardzo małe skoki (nawet po 2000 skoków na obrót), co może mieć znaczenie przy stosowaniu ich do pozycjonowania różnego typu urządzeń.
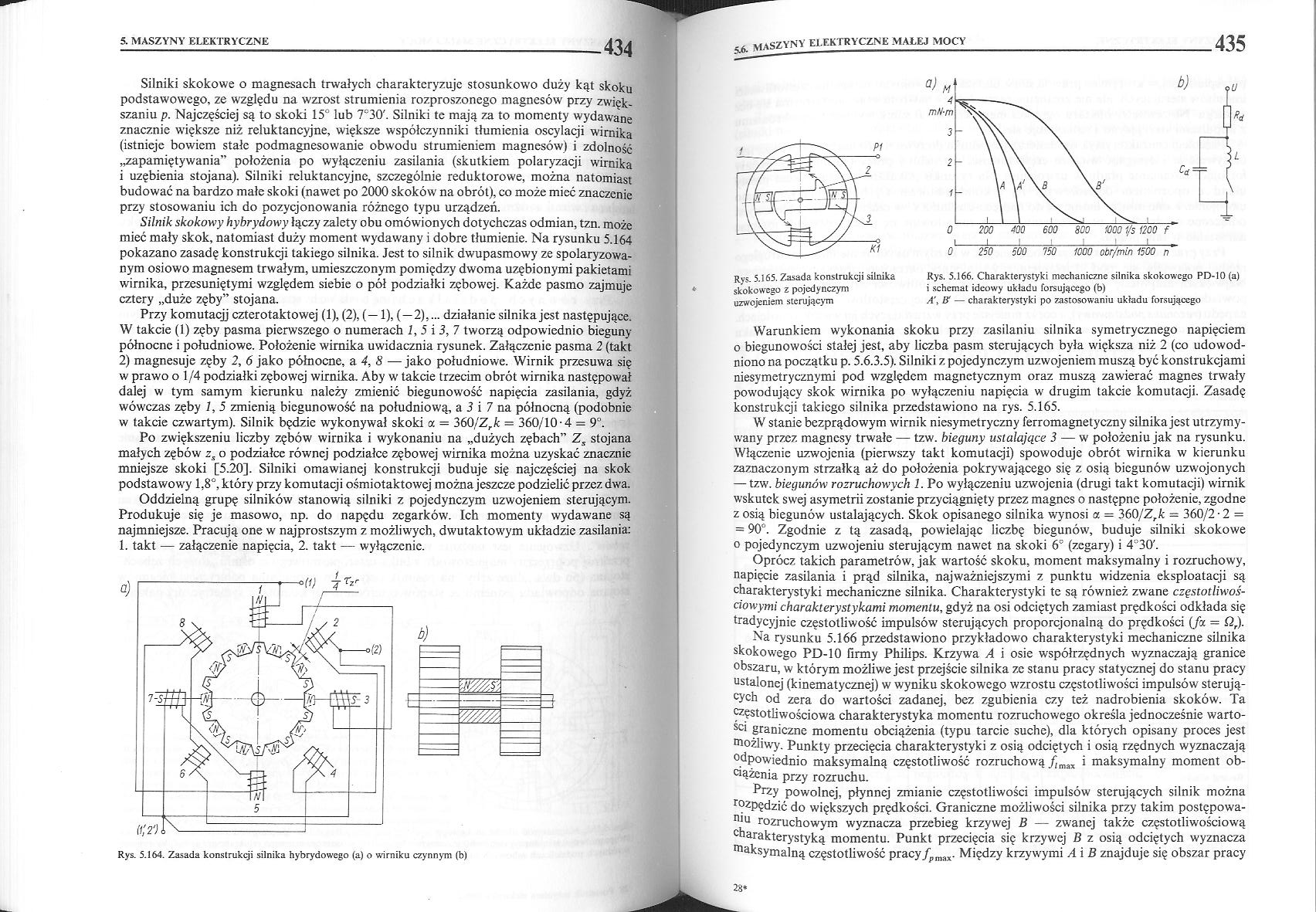
Silnik skokowy hybrydowy łączy zalety obu omówionych dotychczas odmian, tzn. może mieć mały skok, natomiast duży moment wydawany i dobre tłumienie. Na rysunku 5.164 pokazano zasadę konstrukcji takiego silnika. Jest to silnik dwupasmowy ze spolaryzowanym osiowo magnesem trwałym, umieszczonym pomiędzy dwoma uzębionymi pakietami wirnika, przesuniętymi względem siebie o pół podziałki zębowej. Każde pasmo zajmuje cztery „duże zęby” stojana.
Przy komutacjj czterotaktowej (1), (2), (—1), (—2),... działanie silnika jest następujące. W takcie (1) zęby pasma pierwszego o numerach 1, 5 i 3, 7 tworzą odpowiednio bieguny północne i południowe. Położenie wirnika uwidacznia rysunek. Załączenie pasma 2 (takt 2) magnesuje zęby 2, 6 jako północne, a 4, 8 — jako południowe. Wirnik przesuwa się w prawo o 1/4 podziałki zębowej wirnika. Aby w takcie trzecim obrót wirnika następował dalej w tym samym kierunku należy zmienić biegunowość napięcia zasilania, gdyż wówczas zęby 1, 5 zmienią biegunowość na południową, a 5 i 7 na północną (podobnie w takcie czwartym). Silnik będzie wykonywał skoki a = 360jZrk = 360/10-4 = 9°.
Po zwiększeniu liczby zębów wirnika i wykonaniu na „dużych zębach” Z, stojana małych zębów zs o podziałce równej podziałce zębowej wirnika można uzyskać znacznie mniejsze skoki [5.20]. Silniki omawianej konstrukcji buduje się najczęściej na skok podstawowy 1,8", który przy komutacji ośmiotaktowej można jeszcze podzielić przez dwa.
Oddzielną grupę silników stanowią silniki z pojedynczym uzwojeniem sterującym. Produkuje się je masowo, np. do napędu zegarków. Ich momenty wydawane są najmniejsze. Pracują one w najprostszym z możliwych, dwutaktowym układzie zasilania: 1. takt — załączenie napięcia, 2. takt — wyłączenie.
Rys. 5.164. Zasada konstrukcji silnika hybrydowego (a) o wirniku czynnym (b)

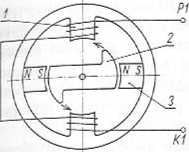
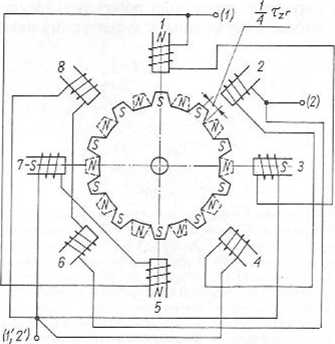
Rys. 5.165. Zasada konstrukcji silnika skokowego z pojedynczym uzwojeniem sterującym
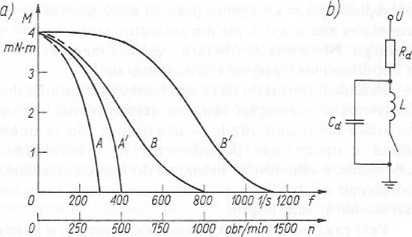
Rys. 5.166. Charakterystyki mechaniczne silnika skokowego PD-10 (a) i schemat ideowy układu forsującego (b)
A\ B' — charakterystyki po zastosowaniu układu forsującego
Warunkiem wykonania skoku przy zasilaniu silnika symetrycznego napięciem o biegunowości stałej jest, aby liczba pasm sterujących była większa niż 2 (co udowodniono na początku p. 5.Ó.3.5). Silniki z pojedynczym uzwojeniem muszą być konstrukcjami niesymetrycznymi pod względem magnetycznym oraz muszą zawierać magnes trwały powodujący skok wirnika po wyłączeniu napięcia w drugim takcie komutacji. Zasadę konstrukcji takiego silnika przedstawiono na rys. 5.165.
W stanie bezprądowym wirnik niesymetryczny ferromagnetyczny silnika jest utrzymywany przez magnesy trwałe — tzw. bieguny ustalające 3 — w położeniu jak na rysunku. Włączenie uzwojenia (pierwszy takt komutacji) spowoduje obrót wirnika w kierunku zaznaczonym strzałką aż do położenia pokrywającego się z osią biegunów uzwojonych — tzw. biegunów rozruchowych 1. Po wyłączeniu uzwojenia (drugi takt komutacji) wirnik wskutek swej asymetrii zostanie przyciągnięty przez magnes o następne położenie, zgodne z osią biegunów ustalających. Skok opisanego silnika wynosi a = 360/Zrk = 360/2 • 2 = = 90°. Zgodnie z tą zasadą, powielając liczbę biegunów, buduje silniki skokowe o pojedynczym uzwojeniu sterującym nawet na skoki 6° (zegary) i 4“30'.
Oprócz takich parametrów, jak wartość skoku, moment maksymalny i rozruchowy, napięcie zasilania i prąd silnika, najważniejszymi z punktu widzenia eksploatacji są charakterystyki mechaniczne silnika. Charakterystyki te są również zwane częstotliwościowymi charakterystykami momentu, gdyż na osi odciętych zamiast prędkości odkłada się tradycyjnie częstotliwość impulsów sterujących proporcjonalną do prędkości (fot = Qr).
Na rysunku 5.166 przedstawiono przykładowo charakterystyki mechaniczne silnika skokowego PD-10 firmy Philips. Krzywa A i osie współrzędnych wyznaczają granice obszaru, w którym możliwe jest przejście silnika ze stanu pracy statycznej do stanu pracy ustalonej (kinematycznej) w wyniku skokowego wzrostu częstotliwości impulsów sterujących od zera do wartości zadanej, bez zgubienia czy też nadrobienia skoków. Ta częstotliwościowa charakterystyka momentu rozruchowego określa jednocześnie warto-SC1 graniczne momentu obciążenia (typu tarcic suche), dla których opisany proces jest możliwy. Punkty przecięcia charakterystyki z osią odciętych i osią rzędnych wyznaczają odpowiednio maksymalną częstotliwość rozruchową fm3X i maksymalny moment obnażenia przy rozruchu.
Przy powolnej, płynnej zmianie częstotliwości impulsów sterujących silnik można rozpędzić do większych prędkości. Graniczne możliwości silnika przy takim postępowaniu rozruchowym wyznacza przebieg krzywej B — zwanej także częstotliwościową cbarakterystyką momentu. Punkt przecięcia się krzywej B z osią odciętych wyznacza maksymalną częstotliwość pracy fpmM- Między krzywymi A i B znajduje się obszar pracy
Wyszukiwarka
Podobne podstrony:
instalacje173 Tablica 9. Dane techniczne silników skokowych o magnesach trwałych, produkowanych prze
2tom215 5. MASZYNY ELEKTRYCZNE 432 że w granicznym przypadku wirnik silnika skokowego może opóźnić s
instalacje082 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 48 Silnik hybrydowy o magnesach trwały
Image 83 87 Do zaler silników krokowych (skokowych) z magnesami trwałymi należą [25,24]: -
2tom217 5. MASZYNY ELEKTRYCZNE 436 przyspieszonej, w którym co prawda silnik nadąża za powolnymi zmi
instalacje134 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 148 Rys. 5.5. Szkic konstrukcyjny silnika sko
• Silniki DC i magnesem trwałym • Silniki ILBC • Silniki krokowe • • Silniki retuktancyine • Silniki
2tom181 5. MASZYNY ELEKTRYCZNE 364 silnik należy odłączyć od sieci, gdyż zacznie wirować w kierunku
19 Model wektorowego układu sterowania silnika synchronicznego z magnesami trwałymi. (2os) dr inż. R
ELEKTRYCZNE Tadeusz GlinkaMASZYNYelektryczne WZBUDZANE MAGNESAMI TRWAŁYMI
CCI20111111�169 14.9. Grzanie się silników Straty mocy, jakie zachodzą w każdej maszynie elektryczne
2tom174 5. MASZYNY ELEKTRYCZNE 3505.5.6. Silniki prądu stałego 5.5.6.I. Rodzaje silników i ich
2tom210 5. MASZYNY ELEKTRYCZNE 422 (tzw. kąt histerezy) o jaki pierwsza harmoniczna strumienia opóźn
2tom211 5. MASZYNY ELEKTRYCZNE 424 M. = — /vR2y + XL2 VA~ ViR+UXdsin9L+ URcosSL)
więcej podobnych podstron