2tom239
6. NAPĘD ELEKTRYCZNY 480
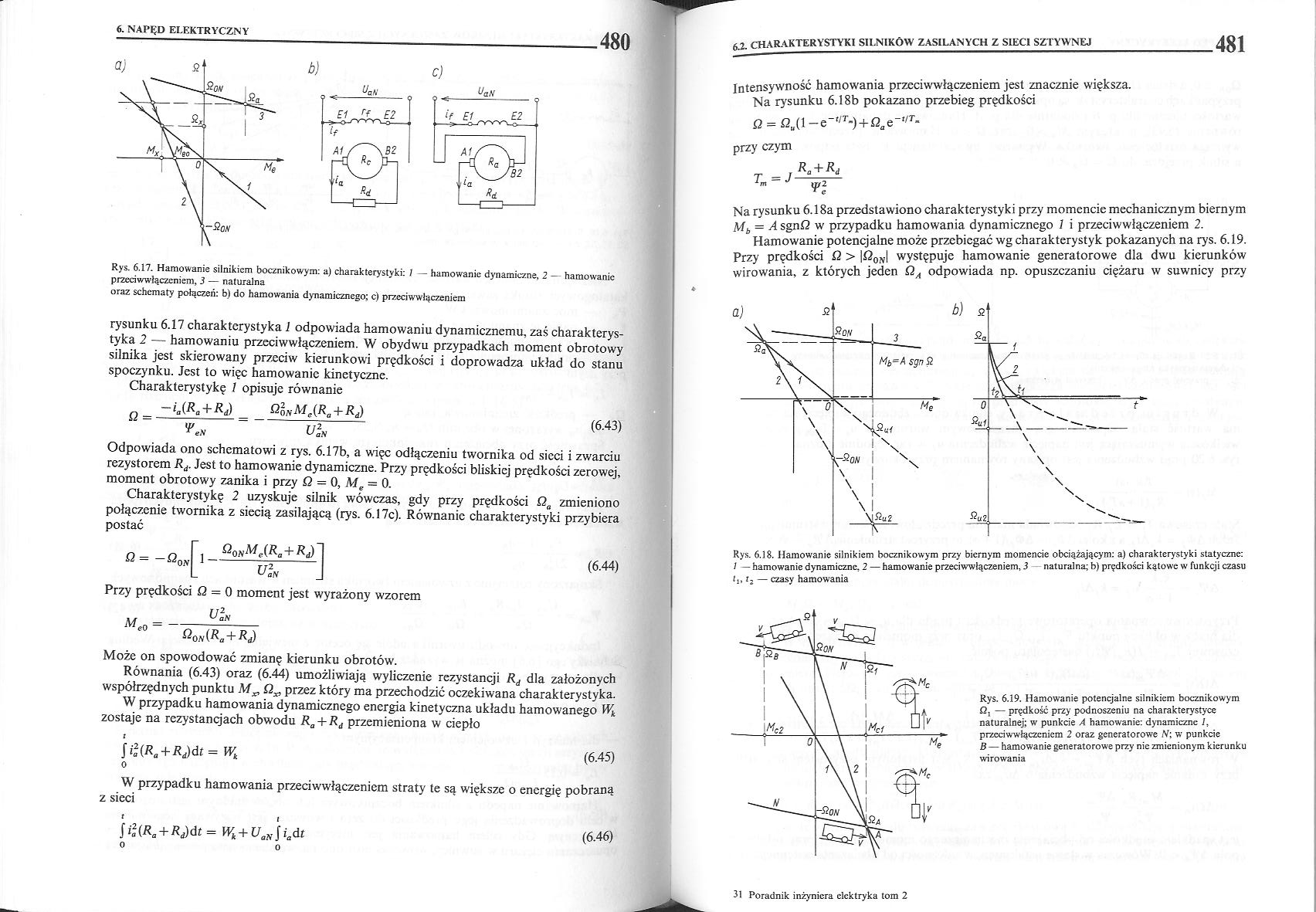
Rys. 6.17. Hamowanie silnikiem bocznikowym: a) charakterystyki: / — hamowanie dynamiczne, 2 — hamowanie przeciwwłączeniem, 3 — naturalna
oraz schematy połączeń: b) do hamowania dynamicznego; c) przeciwwłączeniem
rysunku 6.17 charakterystyka 1 odpowiada hamowaniu dynamicznemu, zaś charakterystyka 2 — hamowaniu przeciwwłączeniem. W obydwu przypadkach moment obrotowy silnika jest skierowany przeciw kierunkowi prędkości i doprowadza układ do stanu spoczynku. Jest to więc hamowanie kinetyczne.
Charakterystykę 1 opisuje równanie
^ —‘„(R-a + R-d) Qo.\M(R+Rd)
Q =---=--—2- (6.43)
* eN ugN
Odpowiada ono schematowi z rys. 6.17b, a więc odłączeniu twornika od sieci i zwarciu rezystorem Rd. Jest to hamowanie dynamiczne. Przy prędkości bliskiej prędkości zerowej, moment obrotowy zanika i przy Q = 0, = 0.
Charakterystykę 2 uzyskuje silnik wówczas, gdy przy prędkości Qa zmieniono połączenie twornika z siecią zasilającą (rys. 6.17c). Równanie charakterystyki przybiera postać
Q = —Qn
(6.44)
Przy prędkości Q = 0 moment jest wyrażony wzorem
Może on spowodować zmianę kierunku obrotów.
Równania (6.43) oraz (6.44) umożliwiają wyliczenie rezystancji Rd dla założonych współrzędnych punktu (2„ przez który ma przechodzić oczekiwana charakterystyka.
W przypadku hamowania dynamicznego energia kinetyczna układu hamowanego Wk zostaje na rezystancjach obwodu Ra + Rd przemieniona w ciepło
(6.45)
\i1(Ra + Rd)dt=Wk
W przypadku hamowania przeciwwłączeniem straty te są większe o energię pobraną
\il(Ra + Rd)dt-
Wk+UaN\iadt
(6.46)
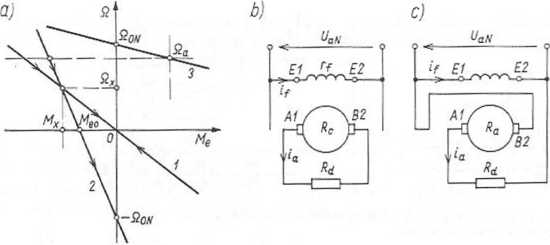
Intensywność hamowania przeciwwłączeniem jest znacznie większa. Na rysunku 6.18b pokazano przebieg prędkości
Q = Qu(\ —e~'IT-) + Qae~'IT‘
przy czym
Tm
= J
Na rysunku 6.18a przedstawiono charakterystyki przy momencie mechanicznym biernym \ib = A sgni2 w przypadku hamowania dynamicznego 1 i przeciwwłączeniem 2.
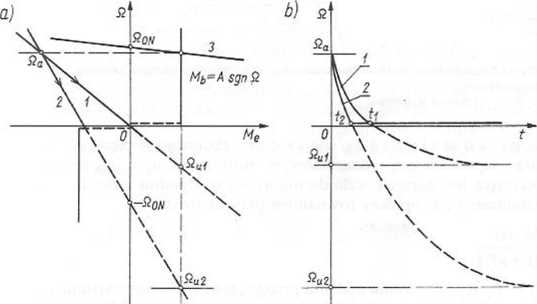
Hamowanie potencjalne może przebiegać wg charakterystyk pokazanych na rys. 6.19. Przy prędkości S2 > |Ó0N| występuje hamowanie generatorowe dla dwu kierunków wirowania, z których jeden 0A odpowiada np. opuszczaniu ciężaru w suwnicy przy
Rys. 6.18. Hamowanie silnikiem bocznikowym przy biernym momencie obciążającym: a) charakterystyki statyczne: 1 — hamowanie dynamiczne. 2 — hamowanie przeciwwłączeniem, 3 naturalna; b) prędkości kątowe w funkcji czasu 11, r2 — czasy hamowania
Rys. 6.19. Hamowanie potencjalne silnikiem bocznikowym — prędkość przy podnoszeniu na charakterystyce naturalnej; w punkcie A hamowanie: dynamiczne 1, przeciwwłączeniem 2 oraz generatorowe N: w punkcie B — hamowanie generatorowe przy nic zmienionym kierunku wirowania
31 Poradnik inżyniera elektryka tom 2
Wyszukiwarka
Podobne podstrony:
2tom243 6. NAPĘD ELEKTRYCZNY 488 Rys. 6.27. Hamowanie silnikiem szeregowym (schematy i charakterysty
Rys. 6. Schemat połączeń silników: a) bocznikowego, charakterystyka mechaniczna, b) szeregowego,
2tom242 6. NAPĘD ELEKTRYCZNY 486 6. NAPĘD ELEKTRYCZNY 486 Rys. 6.24. Charakterystyka silnika szerego
2tom256 6. NAPĘD ELEKTRYCZNY 514 6. NAPĘD ELEKTRYCZNY 514 Rys. 6.57. Charakterystyki statyczne silni
2tom234 6. NAPĘD ELEKTRYCZNY 470 Przykładowy przebieg rj = f(MJMs) pokazano na rys. 6.6. Nowoczesne
2tom238 6. NAPĘD ELEKTRYCZNY 478 Odciążony silnik zwiększa swą prędkość do ok. Qorl = V<j}llxPeN,
2tom241 6. NAPĘD ELEKTRYCZNY 484 Rys. 6.22. Silnik szeregowy prądu stałego: a) schemat połączeń; b)
2tom251 6. .NAPĘD ELEKTRYCZNY 504 Rys. 6.45. Praca ciągła silnika przy zmiennym obciążeniu 1 — przeb
CCF20111125�009 (4) frcapudniawa f „ pnyhamawia fQ hamlcma Rys. 14. Hamownie silnikiem bocznikowym.
Symulacje charakterystyk diody elektroluminescencyjnej Rys 17. Układ do wyznaczania charakteiystyki
3tom300 9. INSTALACJE ELEKTRYCZNE 602 9. INSTALACJE ELEKTRYCZNE 602 / 2 Rys. 9.17. Schematy pól rozd
482 2 ,4 MkAffJOtiCt ELEKTRyCZNE MATERIAŁÓW RYS U 17 Schematyczne przedstawienie zalcimrfci prze wod
2tom232 Napęd elektryczny prof. dr bab. inż. Kazimierz Bisztyga6.1. Równanie ruchu napędu Układ napę
2tom233 6. NAPĘD ELEKTRYCZNY 468 W niektórych mechanizmach występuje zależność momentu obrotowego od
2tom235 6. NAPĘD ELEKTRYCZNY 472 a) c 25 Bu / V b) s 2u »e mĄ/ i A ■
2tom236 6. NAPĘD ELEKTRYCZNY 4742 At, Obliczenia takie najlepiej prowadzić na EMC, w której łatwo wp
2tom237 6. NAPĘD ELEKTRYCZNY 476 oraz z uwzględnieniem funkcji wartości początkowych O •
2tom246 6. NAPĘD ELEKTRYCZNY 494 Rys. 6.33. Oscylacyjny przebieg prędkości kątowej a — przy odciążen
więcej podobnych podstron