M018
Punkt zwrotu 1.
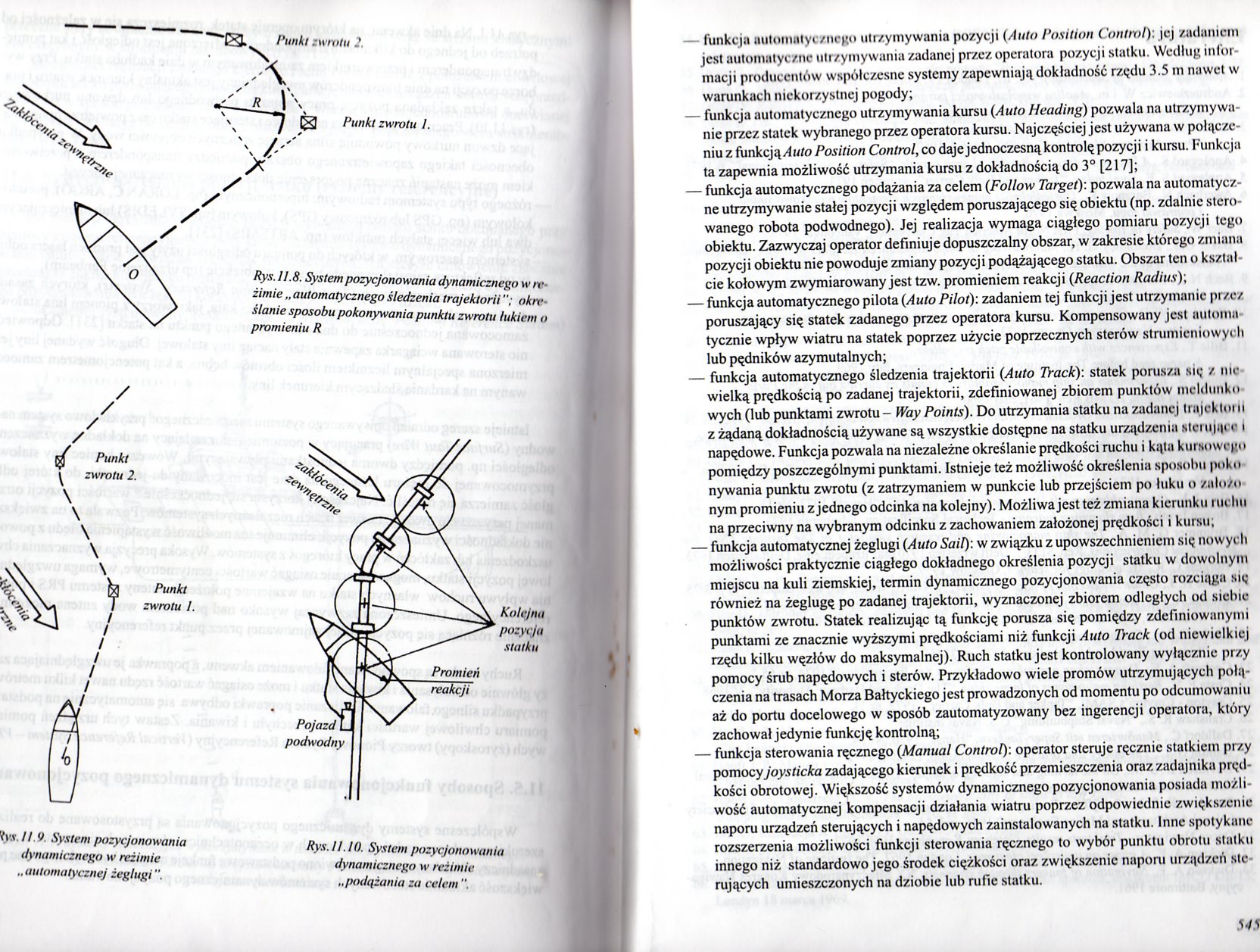
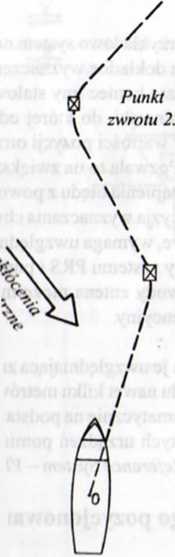
Rys. 11.8. System pozycjonowania dynamicznego w reżimie „ automatycznego śledzenia trajektoriiokre sianie sposobu pokonywania punktu zwrotu lukiem o promieniu R
tys.UM. System pozycjonowania dynamicznego w reżimie „ automatycznej żeglugi”,
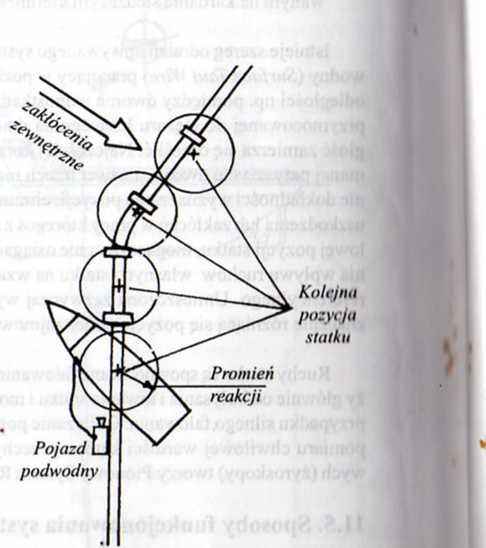
Rys.ll.lt). System pozycjonowania dynamicznego w reżimie podążania za celem

funkcja automatycznego utrzymywania pozycji (Auto Position Control): jej zadaniem jest automatyczne utrzymywania zadanej przez operatora pozycji statku. Według informacji producentów współczesne systemy zapewniają dokładność rządu 3.5 m nawet w warunkach niekorzystnej pogody;
— funkcja automatycznego utrzymywania kursu (Auto Heading) pozwala na utrzymywanie przez statek wybranego przez operatora kursu. Najczęściej jest używana w połączeniu z ftinkcjązlu/o Position Control, co dajejednoczesną kontrolę pozycji i kursu. Funkcja ta zapewnia możliwość utrzymania kursu z dokładnością do 3° [217];
— funkcja automatycznego podążania za celem (Follow Target): pozwala na automatyczne utrzymywanie stałej pozycji względem poruszającego się obiektu (np. zdalnie sterowanego robota podwodnego). Jej realizacja wymaga ciągłego pomiaru pozycji tego obiektu. Zazwyczaj operator definiuje dopuszczalny obszar, w zakresie którego zmiana pozycji obiektu nie powoduje zmiany pozycji podążającego statku. Obszar ten o kształcie kołowym zwymiarowany jest tzw. promieniem reakcji (Reaction Radius)-,
— funkcja automatycznego pilota (Auto Pilot): zadaniem tej funkcji jest utrzymanie pi zez poruszający się statek zadanego przez operatora kursu. Kompensowany jest miloma tycznie wpływ wiatru na statek poprzez użycie poprzecznych sterów strumieniowych lub pędników azymutalnych;
— funkcja automatycznego śledzenia trajektorii (Auto Track): statek porusza się z me wielką prędkością po zadanej trajektorii, zdefiniowanej zbiorem punktów meldunku wych (lub punktami zwrotu - Way Points). Do utrzymania statku na zadanej liujckloi ii z żądaną dokładnością używane są wszystkie dostępne na statku urządzenia siei ująrc i napędowe. Funkcja pozwala na niezależne określanie prędkości ruchu i kąta kursowego pomiędzy poszczególnymi punktami. Istnieje też możliwość określenia sposobu poko nywania punktu zwrotu (z zatrzymaniem w punkcie lub przejściem po luku o zalo/o nym promieniu z jednego odcinka na kolejny). Możliwa jest też zmiana kierunku mchu na przeciwny na wybranym odcinku z zachowaniem założonej prędkości i kursu;
— funkcja automatycznej żeglugi (Auto Sail): w związku z upowszechnieniem się nowych możliwości praktycznie ciągłego dokładnego określenia pozycji statku w dowolnym miejscu na kuli ziemskiej, termin dynamicznego pozycjonowania często rozciąga się również na żeglugę po zadanej trajektorii, wyznaczonej zbiorem odległych od siebie punktów zwrotu. Statek realizując tą funkcję porusza się pomiędzy zdefiniowanymi punktami ze znacznie wyższymi prędkościami niż funkcji Auto Track (od niewielkiej rzędu kilku węzłów do maksymalnej). Ruch statku jest kontrolowany wyłącznie przy pomocy śrub napędowych i sterów. Przykładowo wiele promów utrzymujących połączenia na trasach Morza Bałtyckiego jest prowadzonych od momentu po odeumowaniu aż do portu docelowego w sposób zautomatyzowany bez ingerencji operatora, który zachował jedynie funkcję kontrolną;
— funkcja sterowania ręcznego (Manuał Control): operator steruje ręcznie statkiem przy pomocy joysticka zadającego kierunek i prędkość przemieszczenia oraz zadajnika prędkości obrotowej. Większość systemów dynamicznego pozycjonowania posiada możliwość automatycznej kompensacji działania wiatru poprzez odpowiednie zwiększenie naporu urządzeń sterujących i napędowych zainstalowanych na statku. Inne spotykane rozszerzenia możliwości funkcji sterowania ręcznego to wybór punktu obrotu statku innego niż standardowo jego środek ciężkości oraz zwiększenie naporu urządzeń sle rujących umieszczonych na dziobie lub rufie statku.
Wyszukiwarka
Podobne podstrony:
M018 // Rys. U.8. System pozycjonowania dynamicznego w,v Z!!me " somatycznego śledzenia trajekt
155 § 1. Długość krzywej krzywej łańcuchowej i ma w tym punkcie punkt zwrotu (rys. 12). Rugując z dw
scan0028 (8) Dotyczy samochodów: z systemem FIS (wersja standardowa)Wersja standardowa zestawu przyr
strona0045 (2) 86 Rys. 7.11. Pompa wtryskowa systemu 8o9ch 1- sprężyna zaworu ciśnieniowego zwrotneg
scan0028 (8) Dotyczy samochodów: z systemem FIS (wersja standardowa)Wersja standardowa zestawu przyr
CCI20100414�018 12 Rys. 11. Okrąg podziałowy koła zębatego przetoczył się do ostatniego przyjętego p
310 (11) 310 Podstawy nawigacji morskiej oś nabiezmka Rys. 16.4. System nabiezmka z dwóch par staw
328 (2) Wiązka laserowa przechodząc z lasera do przedmiotu spawanego (rys. 11.54) poprzez system prz
0000037 2 74 Prawidłowe siedzenie Rys. 11 Pozycja zalecana w przypadku ostrych bólów pleców. Skutek
71252 scan0028 (8) Dotyczy samochodów: z systemem FIS (wersja standardowa)Wersja standardowa zestawu
Rys. 11. Przykład treści plakatu informującego pracowników o rozpoczęciu wdrażania systemu zarządzan
1tom082 4. INFORMATYKA 166 Rys. 4.11. Ogólna struktura systemu ekspertowego operacyjnej systemu. Moż
więcej podobnych podstron