mechanika91
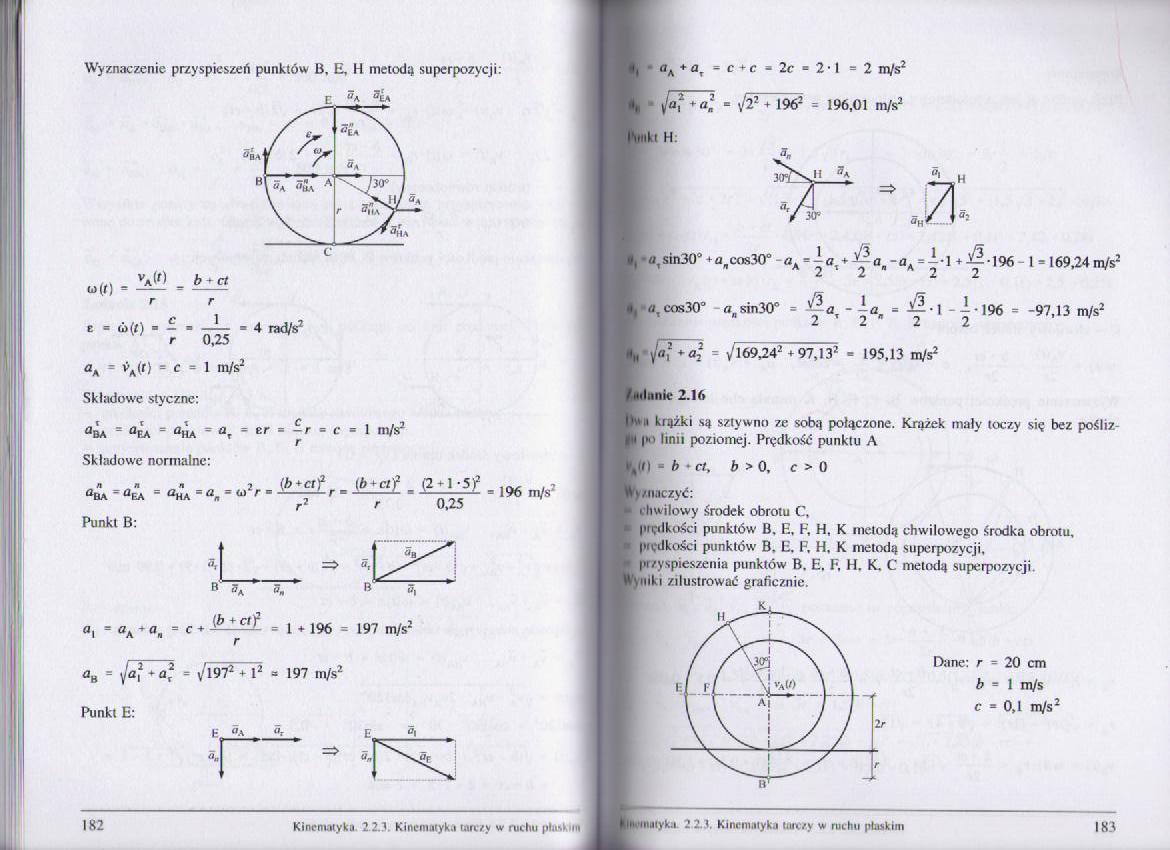
Wyznaczenie przyspieszeń punktów B, E, H metody superpozycji:
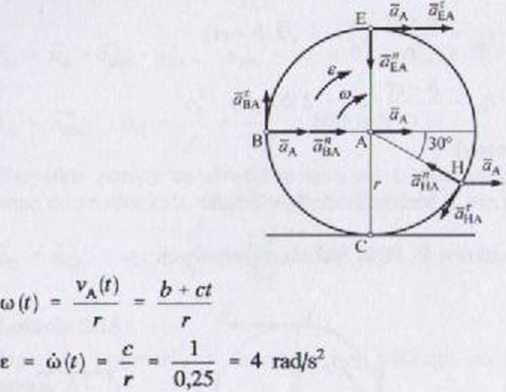
aA = vA(f) = c = 1 m/s2 Składowe styczne:
aDA ~ arA = °ha = ar = er = -r = c = 1 m/s3
Składowe normalne:
aws. = aL = aHAmanm^‘r Punkt B:
\h+ctfr
ib + cif _ (2 + 1-5 r r “ 0,25
196 m/s7
» 2c - 2-1 = 2 m/s2 TT962 = 196,01 m/s2
hndt li
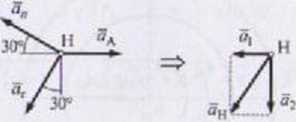
I, <J,sin30' * a,cos.W aA = i a, * -v^ a.-aA = ^-1 + -^196 1 = 169,24 m/s:
2 * 2 " 2
«„ V".3 *a2 = y'169^42 +97.132 - 195,13 m/s2
«, «,cos30° «„sin30" = • 1 ^ -196 - -97,13 m/s2
2 2 2 2
/ nlunic 2.16
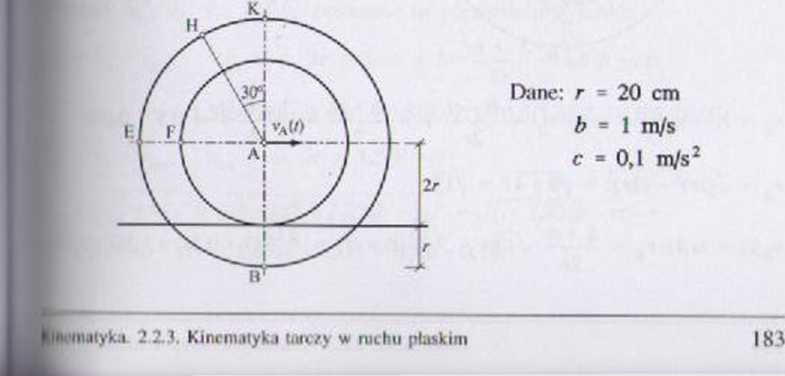
l'\' i krążki są sztywno ze sobą połączone. Krążek mały toczy się bez pośliz-I • po linii poziomej. Prędkość punktu A
°\ = flA * 0n

PAtr) ■ b - cł, b > 0, c > 0 py/.tuczyć:
* i hwilowy środek obrotu C,
piędkości punktów- B, E, F, H, K metodą chwilowego środka obrotu, prędkości punktów B. E. F, H, K metodą superpozycji,
I"/yspieszenia punktów B. E. F, H. K. C metodą superpozycji Wyniki zilustrować graficznie.
aH = Jaj + a*
Punkt E:
v' 1972 + i2 = 197 m/s2
182
Kinematyka 2.2.3 Kinematyka burczy w mchu pla%v mi
Wyszukiwarka
Podobne podstrony:
mechanika100 Wyznaczenie vB, <■>,: cor, Vba = <*), *5r = 5u,r VA + VBA * ł ii »tf Z d
mechanika100 Wyznaczenie vB, <■>,: cor, Vba = <*), *5r = 5u,r VA + VBA * ł ii »tf Z d
mechanika21 — wyznaczenie współrzędnych punktu A e e e * > ; r*S = ML *A >*A *A5, s, *t (1.87)
mechanika74 Metoda superpozycji wyznaczania przyspieszenia chwilowego Rozpatrujemy tarczę w konfigur
CCI00171 (2) Zadanie nr 3Dla położenia mechanizmu pokazanego na schemacie wyznaczyć prędkości i przy
s 205 205 7.3. Przyspieszenie punktów ciała w ruchu płaskim Zadanie 7.47 V/ mechanizmie Czebyszewa k
Mechanika44 Analityczne wyznaczanie przyspieszenia w ruchu płaskim. a^p - przyspieszenie ruchu obrot
Metody wyznaczania przyspieszenia w ruchu płaskim 2. Na podstawie położenia _x
Slajd35 Metody wyznaczania przyspieszeń w ruchu płaskim 35
2a (84) 11. Metody wyznaczania przyspieszeń w ruchu płaskim. Przyspieszenie dowolnego punktu bryły s
zadania 2 Określić prędkość i przyspieszenie punktów B i D mechanzmu płaskiego ustawionego w położen
DSC00481 (7) Metody pomiarów sytuacyjnych 4) METODA WCIĘĆ KĄTOWYCH I LINIOWYCH Przy wyznaczaniu poje
mechanika103 Wyznaczenie vB, <*r> VBA = u, *3r = 3cił,i , , _ VA + VBA’ VBe = VB» VBy vA
mechanika103 Wyznaczenie vB, <*r> VBA = u, *3r = 3cił,i , , _ VA + VBA’ VBe = VB» VBy vA
więcej podobnych podstron