P1080276
7. Napędy robotów przemysłowych
dwóch rzędach kulek. Działaniu elektromagnesów przeciwstawiają się dwie napięte wstępnie płaskie sprężyny 4 i 5 o liniowej charakterystyce, dzięki czemu przesunięcia suwaka są proporcjonalne do różnicy prądów płynących w uzwojeniach elektromagnesów. W środkowym położeniu suwaka otwarcia szczelin przepływowych są jednakowe i ciśnienia w przewodach Cl i C2 są sobie równe (p\ -—Pi — 0,5/?o), dzięki czemu wirnik silnika pozostaje w stanie spoczynku. W przypadku nieznacznego przemieszczenia suwaka poza położenie środkowe zmienia się otwarcie szczelin przepływowych, w wyniku czego w przewodach Cl i C2 powstaje różnica ciśnień powodująca obracanie się wirnika silnika hydraulicznego.
Współcześnie w hydraulicznych napędach robotów są stosowane wzmacniacze dwustopniowe, w których pierwszy stopień wzmocnienia stanowi przetwornik elektromagnetyczny, a drugi — wzmacniacz hydrauliczny dławieniowy typu dysza-przesłon a—suwak.
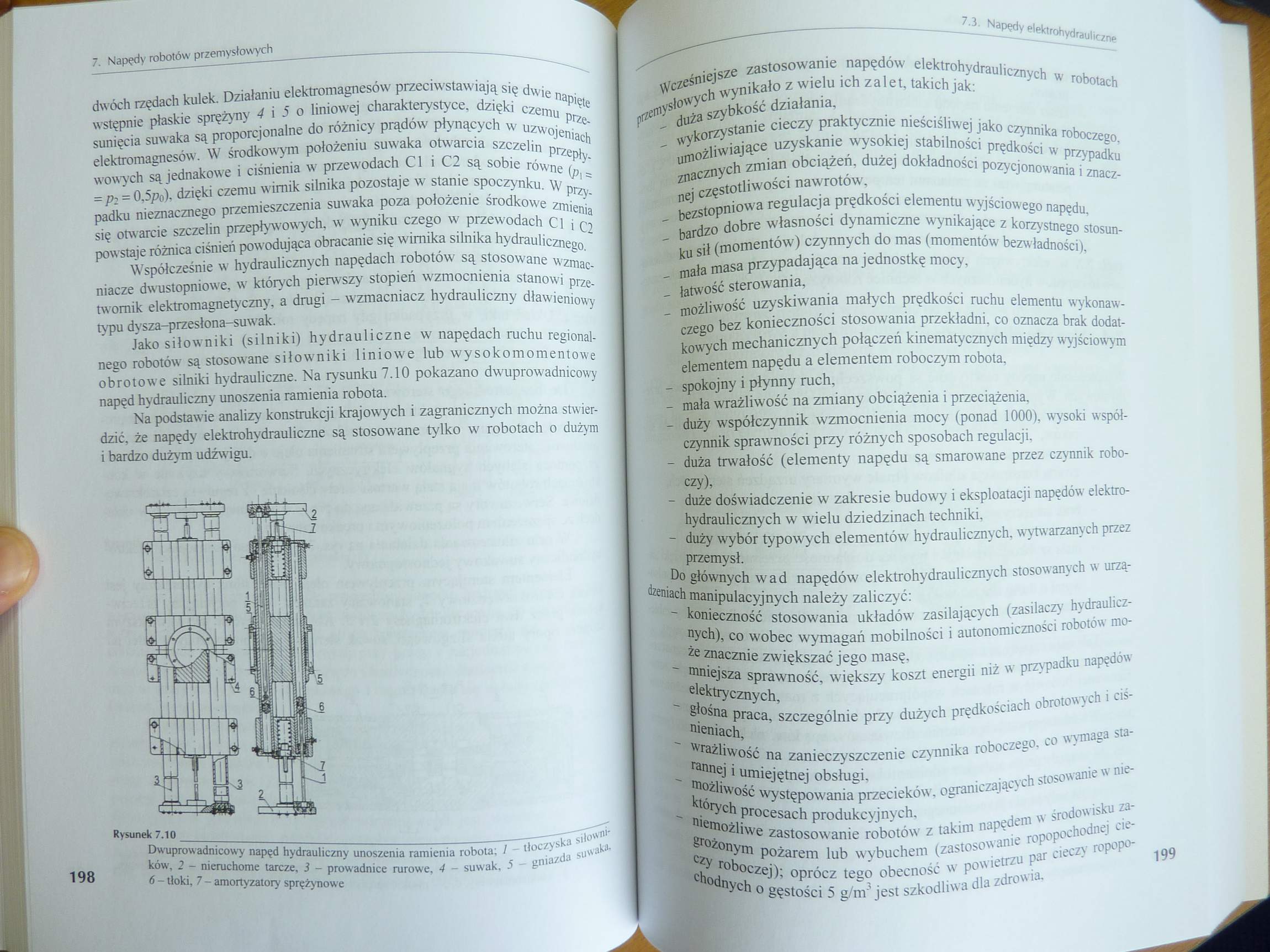
Jako siłowniki (silniki) hydrauliczne w napędach ruchu regionalnego robotów są stosowane siłowniki liniowe lub wysokomomentowe obrotowe silniki hydrauliczne. Na rysunku 7.10 pokazano dwuprowadnicowy napęd hydrauliczny unoszenia ramienia robota.
Na podstawie analizy konstrukcji krajowych i zagranicznych można stwierdzić, że napędy elektrohydrauliczne są stosowane tylko w robotach o dużym i bardzo dużym udźwigu.
Rysunek 7.10^_ _________
Dwuprowadnicowy napęd hydrauliczny unoszenia ramienia robota; 1 — tłoczyska siłownM ków, 2 - nieruchome tarcze, 3 - prowadnice rurowe, 4 - suwak, 5 - gniazda suwaka. I 198 6 — tłoki, 7 - amortyzatory sprężynowe
Wcześniejsze zastosowanie napędów elektrohydraulicznych w robotach przemysłowych wynikało z wielu ich zalet, takich jak:
- duża szybkość działania,
-h wykorzystanie cieczy praktycznie nieściśliwej jako czynnika roboczego, umożliwiające uzyskanie wysokiej stabilności prędkości w przypadku znacznych zmian obciążeń, dużej dokładności pozycjonowania i znacznej częstotliwości nawrotów,
- bezstopniowa regulacja prędkości elementu wyjściowego napędu,
- bardzo dobre własności dynamiczne wynikające z korzystnego stosunku sił (momentów) czynnych do mas (momentów bezwładności),
- mała masa przypadająca na jednostkę mocy,
- łatwość sterowania,
- możliwość uzyskiwania małych prędkości mchu elementu wykonawczego bez konieczności stosowania przekładni, co oznacza brak dodatkowych mechanicznych połączeń kinematycznych między wyjściowym elementem napędu a elementem roboczym robota,
- spokojny i płynny ruch,
- mała wrażliwość na zmiany obciążenia i przeciążenia,
- duży współczynnik wzmocnienia mocy (ponad 1000), wysoki współczynnik sprawności przy różnych sposobach regulacji,
- duża trwałość (elementy napędu są smarowane przez czynnik roboczy),
- duże doświadczenie w zakresie budowy i eksploatacji napędów elektrohydraulicznych w wielu dziedzinach techniki,
- duży wybór typowych elementów hydraulicznych, wytwarzanych przez przemysł.
Do głównych wad napędów elektrohydraulicznych stosowanych w urządzeniach manipulacyjnych należy zaliczyć:
- konieczność stosowania układów zasilających (zasilaczy hydraulicznych), co wobec wymagań mobilności i autonomiczności robotów może znacznie zwiększać jego masę,
- mniejsza sprawność, większy koszt energii niż w przypadku napędów elektrycznych,
- głośna praca, szczególnie przy dużych prędkościach obrotowych i ciśnieniach,
- wrażliwość na zanieczyszczenie czynnika roboczego, co wymaga starannej ^umiejętnej obsługi,
- możliwość występowania przecieków, ograniczających stosowanie w niektórych procesach produkcyjnych,
~ niemożliwe zastosowanie robotów z takim napędem w środowisku zagrożonym pożarem lub wybuchem (zastosowanie ropopochodnej cieczy roboczej); oprócz tego obecność w powietrzu par cieczy ropopochodnych,-o gęstości 5 g/m3 jest szkodliwa dla zdrowia.
199
Wyszukiwarka
Podobne podstrony:
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
73038 P1080282 7. Napędy robotów przemysłowych o stałej amplitudzie i zwykle stałym okresie oraz mod
więcej podobnych podstron