OMiUP t2 Gorski49
2
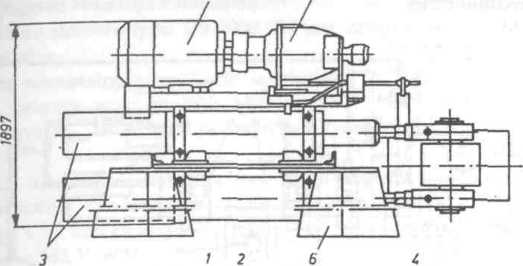
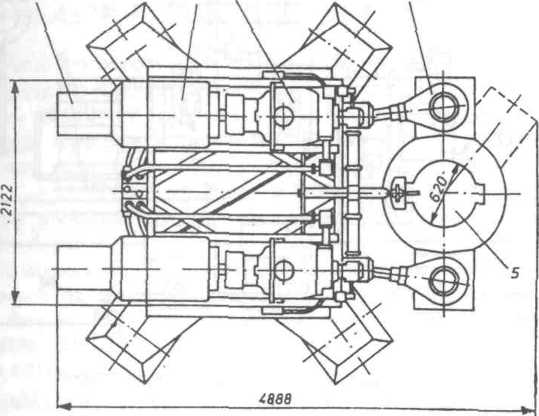
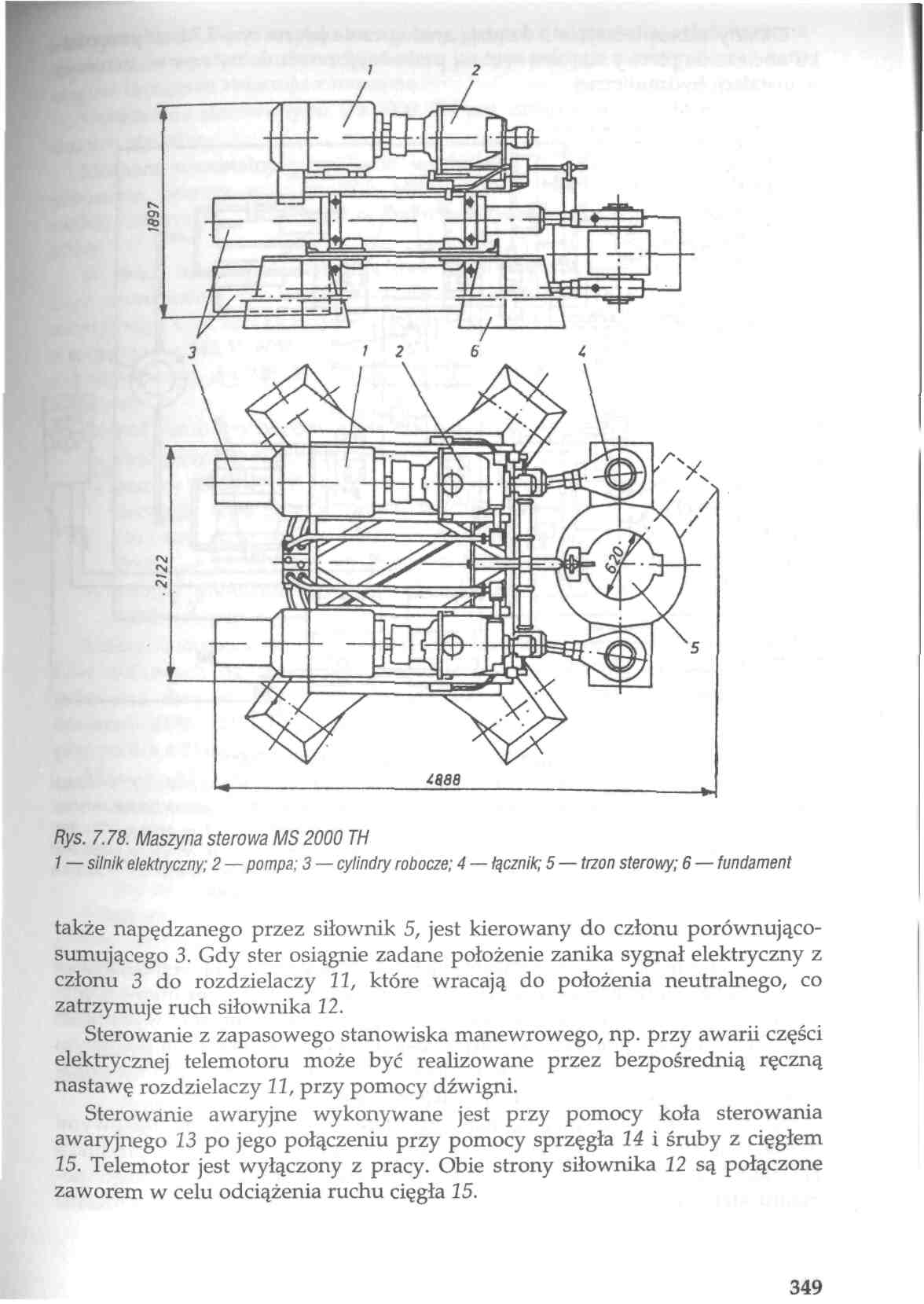
Rys. 7.78. Maszyna sterowa MS 2000 TH
1 — silnik elektryczny; 2 — pompa; 3 — cylindry robocze; 4 — łącznik; 5 — trzon sterowy; 6 — fundament
także napędzanego przez siłownik 5, jest kierowany do członu porównująco-sumującego 3. Gdy ster osiągnie zadane położenie zanika sygnał elektryczny z członu 3 do rozdzielaczy 11, które wracają do położenia neutralnego, co zatrzymuje ruch siłownika 12.
Sterowanie z zapasowego stanowiska manewrowego, np. przy awarii części elektrycznej telemotoru może być realizowane przez bezpośrednią ręczną nastawę rozdzielaczy 11, przy pomocy dźwigni.
Sterowanie awaryjne wykonywane jest przy pomocy koła sterowania awaryjnego 13 po jego połączeniu przy pomocy sprzęgła 14 i śruby z cięgłem 15. Telemotor jest wyłączony z pracy. Obie strony siłownika 12 są połączone zaworem w celu odciążenia ruchu cięgła 15.
349
Wyszukiwarka
Podobne podstrony:
OMiUP t2 Gorski30 (Rys. 7.64. Siłownik sterowego urządzenia szerokokątnego (± 51°) z tłokiem pracują
OMiUP t2 Gorski06 Rys. 7.47. Urządzenie sterowe z napędem ręcznym i hydraulicznym siłownikiem typu n
OMiUP t2 Gorski 9 Rys. 7.1. Wiosłowe urządzenia sterowe: a) jednowiosłowe (statku wikingów); b) jedn
OMiUP t2 Gorski&6 V Rys. 7.4. Rodzaje mocowania sterów rufowych: a) ster statku jednośrubowego;
OMiUP t2 Gorski)6 Odmianą hydraulicznych maszyn sterowych — obecnie stosowaną bardzo szeroko dla swy
89852 OMiUP t2 Gorski03 Rys. 7.42. Urządzenia sterowe z napędem ręcznym i przekładnią typu lino
18186 OMiUP t2 Gorski73 5 3 Rys. 7.95. Dwuśrubowy ster strumieniowy firmy Jastram
więcej podobnych podstron