P1080194 (2)
2. Definicje i klasyfikacja robotów przemysłowych
Ze względu na rozwiązania kinematyczne roboty mobilne można podzielić na: roboty przemieszczające się po stałym torze jezdnym i autonomiczne roboty mobilne (czasem zwane też robocarami), które mogą poruszać się samodzielnie po hali fabrycznej.
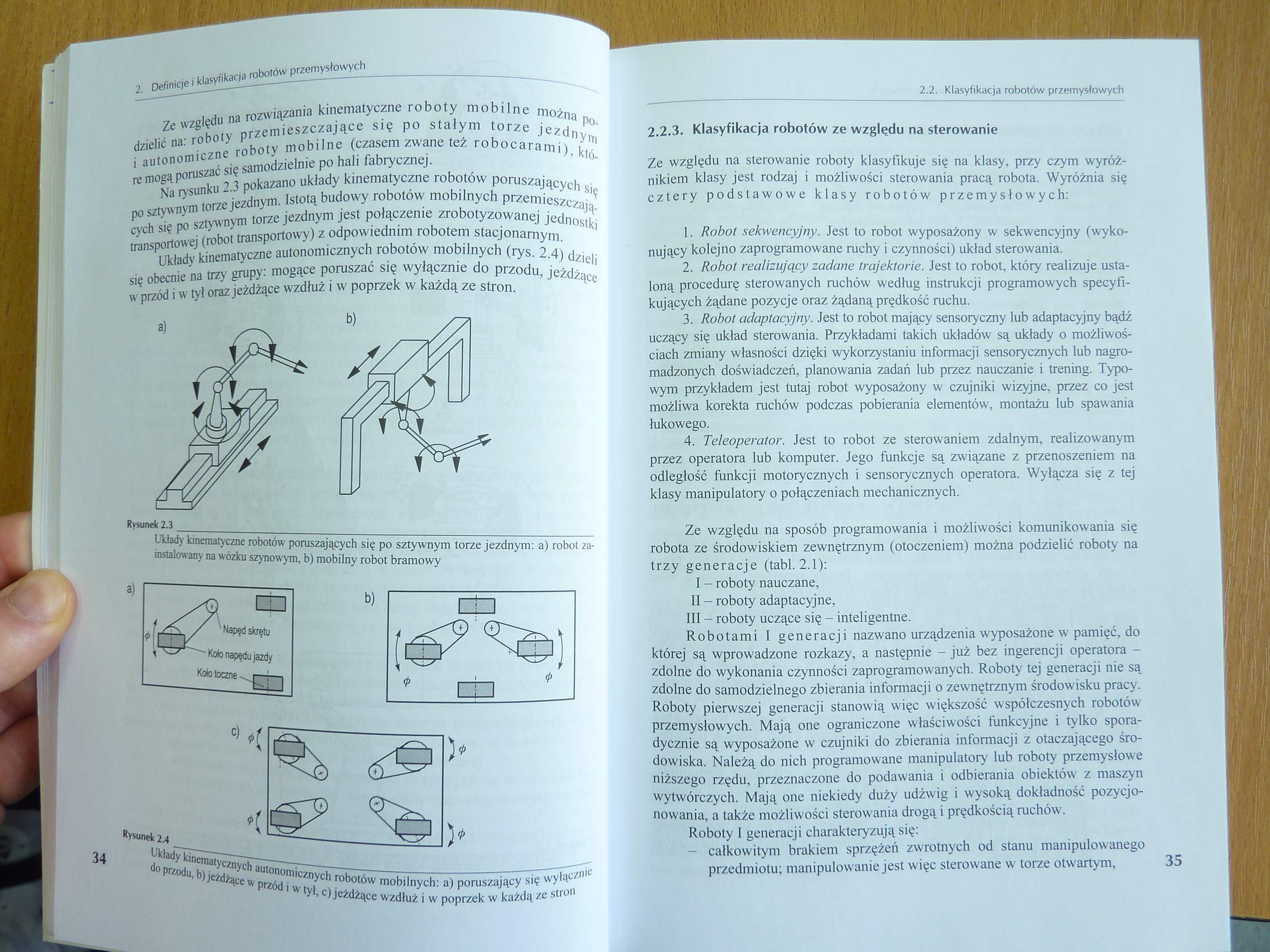
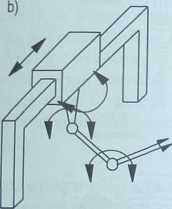
Na rysunku 2.3 pokazano układy kinematyczne robotów poruszających się po sztywnym torze jezdnym. Istotą budowy robotów mobilnych przemieszczających się po sztywnym torze jezdnym jest połączenie zrobotyzowanej jednostki transportowej (robot transportowy) z odpowiednim robotem stacjonarnym.
Układy kinematyczne autonomicznych robotów mobilnych (rys. 2.4) dzieli się obecnie na trzy grupy: mogące poruszać się wyłącznie do przodu, jeżdżące w przód i w tył oraz jeżdżące wzdłuż i w poprzek w każdą ze stron.

Rysunek^_
Układy kinematyczne robotów poruszających się po sztywnym torze jezdnym: a) robot zainstalowany na wózku szynowym, b) mobilny robot bramowy
|
m m |
b) |
^3 |
|
skrętu | ||
|
'Kolo napędu jazdy |
pir | |
|
Kolo toczne| |
* m * |
34 autonomicznych
Rysunek
2.4

przodu, hi • " —“^....w^ycu robotów mobilnych: a) poruszający się wyłącznie
) jeżdżące w przód i w tył, c) jeżdżące wzdłuż i w poprzek w każdą ze stronH
2.2.3. Klasyfikacja robotów ze względu na sterowanie
Ze względu na sterowanie roboty klasyfikuje się na klasy, przy czym wyróżnikiem klasy jest rodzaj i możliwości sterowania pracą robota. Wyróżnia się cztery podstawowe klasy robotów przemysłowych:
1. Robot sekwencyjny. Jest to robot wyposażony w sekwencyjny (wykonujący kolejno zaprogramowane ruchy i czynności) układ sterowania.
2. Robot realizujący zadane trajektorie. Jest to robot, który realizuje ustaloną procedurę sterowanych ruchów według instrukcji programowych specyfi-kujących żądane pozycje oraz żądaną prędkość ruchu.
3. Robot adaptacyjny. Jest to robot mający sensoryczny lub adaptacyjny bądź uczący się układ sterowania. Przykładami takich układów są układy o możliwościach zmiany własności dzięki wykorzystaniu informacji sensorycznych lub nagromadzonych doświadczeń, planowania zadań lub przez nauczanie i trening. Typowym przykładem jest tutaj robot wyposażony w czujniki wizyjne, przez co jest możliwa korekta ruchów podczas pobierania elementów, montażu lub spawania łukowego.
4. Teleoperator. Jest to robot ze sterowaniem zdalnym, realizowanym przez operatora lub komputer. Jego funkcje są związane z przenoszeniem na odległość funkcji motorycznych i sensorycznych operatora. Wyłącza się z tej klasy manipulatory o połączeniach mechanicznych.
Ze względu na sposób programowania i możliwości komunikowania się robota ze środowiskiem zewnętrznym (otoczeniem) można podzielić roboty na trzy generacje (tabl. 2.1):
I — roboty nauczane,
II - roboty adaptacyjne,
HI - roboty uczące się - inteligentne.
Robotami I generacji nazwano urządzenia wyposażone w pamięć, do której są wprowadzone rozkazy, a następnie - już bez ingerencji operatora -zdolne do wykonania czynności zaprogramowanych. Roboty tej generacji nie są zdolne do samodzielnego zbierania informacji o zewnętrznym środowisku pracy. Roboty pierwszej generacji stanowią więc większość współczesnych robotów przemysłowych. Mają one ograniczone właściwości funkcyjne i tylko sporadycznie są wyposażone w czujniki do zbierania informacji z otaczającego środowiska. Należą do nich programowane manipulatory lub roboty przemysłowe niższego rzędu, przeznaczone do podawania i odbierania obiektów z maszyn wytwórczych. Mają one niekiedy duży udźwig i wysoką dokładność pozycjonowania, a także możliwości sterowania drogą i prędkością ruchów.
Roboty I generacji charakteryzują się:
- całkowitym brakiem sprzężeń zwrotnych od stanu manipulowanego przedmiotu; manipulowanie jest więc sterowane w torze otwartym,
35
Wyszukiwarka
Podobne podstrony:
HPIM0762 MATEMATYKA 2.2. Klasyfikacja robotów przemysłowych Ze względu na rozwiązania kinematyczne r
Image 16 21 1.5. Klasyfikacja robotów przemysłowych Ze względu na wielość kryteriów klasyfikacja rob
P1080196 2. Definicje i klasyfikacja robotów przemysłowych Rysunek 2^_______ Klasyfikacja robotów ze
P1080193 2. Definicje i klasyfikacja robotów przemysłowych względem podstawy. Konfiguracja cylindryc
P1080195 2. Definicje i klasyfikacja robotów przemysłowych Tablica 2.1. Cechy robotów przemysłowych
P1080192 (2) 2. Definicje i klasyfikacja robolów przemysłowych 2.2.1. Klasyfikacja robotów ze względ
P1080191 (2) 2Definicje i klasyfikacja robotów przemysłowych2.1. Definicje podstawowe Do dalszych ro
więcej podobnych podstron