P1080273
7. Napędy robotów przemysłowych
nicznymi danego robota. Za zaworem redukcyjnym jest umieszczony manometr do kontroli ciśnienia powietrza. Smarownica zapewnia rozpylenie oleju, niezbędnego do smarowania przemieszczających się części elementu wykonawczego i rozdzielaczy. W niektórych konstrukcjach robotów przewiduje się umieszczenie filtru na wejściu bloku przygotowania powietrza.
Blok sterowania przepływem sprężonego powietrza zawiera urządzenia, za pomocą których, zgodnie z założonym programem działania robota, otwiera się lub zamyka dostęp sprężonego powietrza do roboczych przestrzeni elementów wykonawczych. Elementami sterowania przepływem powietrza są rozdzielacze pneumatyczne (zawory rozdzielające) sterowane elektromagnetycznie. W szczególnych warunkach (praca w środowisku agresywnym, wybuchowym lub o wysokim stopniu radiacji itp.) stosuje się rozdzielacze ze sterowaniem pneumatycznym.
W robotach ze sterowaniem cyklicznym rozdzielacze są przełączane dwu-stanowo wg zasady: otwarte-zamknięte.
Zgodnie z przyjętymi umownie oznaczeniami na schemacie zaworu rozdzielającego są pokazane:
- położenia zaworu (liczba kwadratów),
- doprowadzenia (drogi) zewnętrzne prowadzące do rozdzielacza,
- kanały wewnętrzne,
- elementy sterowania.
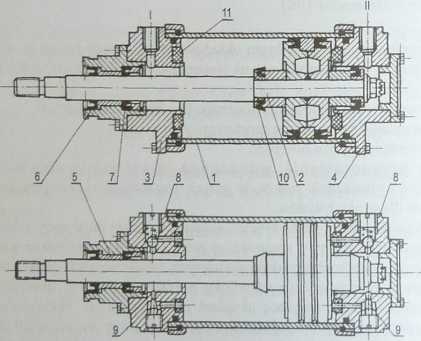
Rysunek . __ _
Siłownik pneumatyczny jednotłoczyskowy dwustronnego działania; / - tuleja, 2 - zespól ka z tłoczyskiem, 3,4- pokrywy, 5 - tuleja prowadząca, 6 - pierścień zgarniający, 7 - m ścień uszczelniający, 8 - zawory zwrotne, 9 - zawory dławiące, JO, U - amortyzatory [''™
Blok elementów wykonawczych napędu zawiera siłowniki pneumatyczne. Siłowniki stosowane do napędu robotów i mechanizmów pomocniczych (chwytaków) mogą być zespołami typowymi (produkowanymi przez wyspecjalizowane firmy) lub specjalnymi. Siłowniki pneumatyczne stosowane najczęściej w robotach, ze względu na ich rozwiązania konstrukcyjne, można podzielić na: tło-czyskowe (zjednostronnym - rys. 7.4 lub dwustronnym tłoczyskiem) oraz beztłoczys-jtowe-rys. 7.5 i 7.6, membranowe, mieszkowe i wahadłowe — rys. 7.7.
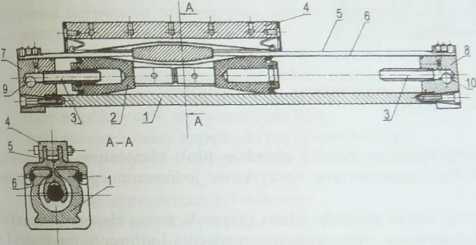
Rysunek 7.5^__
Pneumatyczny siłownik beztłoczyskowy z przeciętą tuleją cylindrową 1 - tuleja cylindrowa, 2 - dok, 3 - zderzaki, 4 - suwak, 5, 6 - uszczelki, 7,8- pokrywy, 9,10 - otwory doprowadzające powietrze [117]
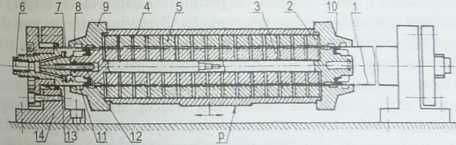
RVsunek 7.6 ___
Pneumatyczny siłownik beztłoczyskowy ze sprzęgiem magnetycznym; 1 - cienkościenna tuleja o specjalnych własnościach magnetycznych, 2 - tłok, 3 - magnesy trwałe umieszczone w tłoku, 4 - suwak, 5 — magnesy trwałe umieszczone w suwaku, 6 - otwór doprowadzający powietrze, 7 — uszczelka, 8 — otwór odpływowy powietrza, 9, 10 - pokrywy. łł - uszczelka, 12 — rurka, 13 — otwory odpływowe, 14 - korpus [117]
p W jednostkach kinematycznych współczesnych robotów do realizacji u eihieszczeń liniowych stosuje się siłowniki tłokowe, obecnie coraz częściej ^łoczyskowe o pokazanej na rysunkach konstrukcji, które umożliwiają uzy-^ ^nie znacznych przesunięć. W napędach ruchów lokalnych są stosowane 'vniki membranowe i wahadłowe.
193
Wyszukiwarka
Podobne podstrony:
P1080288 7. Napędy robotów przemysłowych Przekładnie linowe są stosowane w robotach jako układy w za
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
73038 P1080282 7. Napędy robotów przemysłowych o stałej amplitudzie i zwykle stałym okresie oraz mod
więcej podobnych podstron