P1080287
7. Napędy robolów przemysłowych
(/). Pochylenie korpusu kiści R( następuje od silnika (S2) przez przekładnie zębatą (16), (15), dźwignie (13) łożyskowane na kołach (14) i (12) i przekładnię cięgnową (11), (10), (9). Koło (9) jest osadzone na osi łożyskowanej w przedramieniu R; [124].
7.5.1,2. Przekładnie zębate
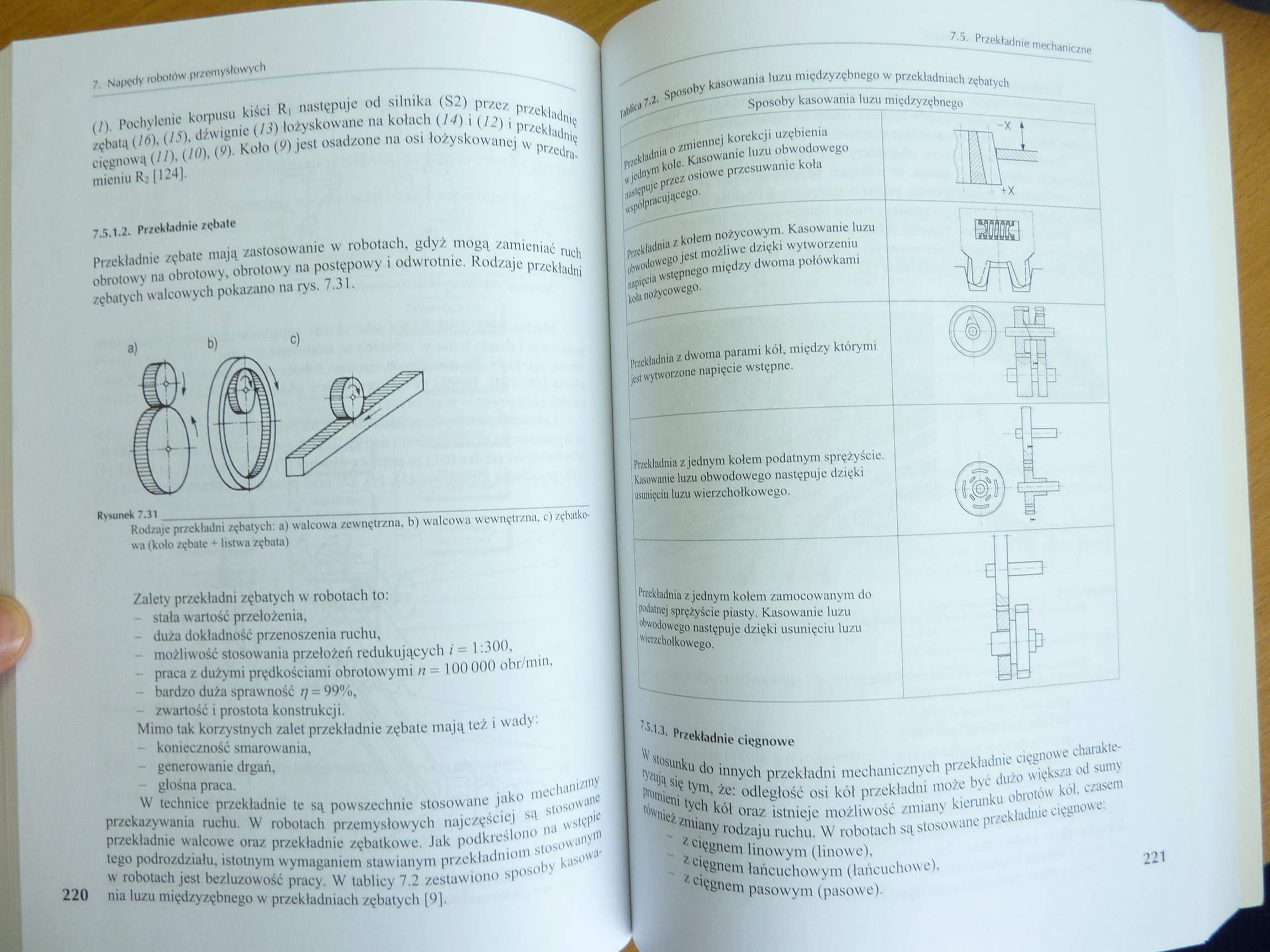
Przekładnie zębate mają zastosowanie w robotach, gdyż mogą zamieniać ruch obrotowy na obrotowy, obrotowy na postępowy i odwrotnie. Rodzaje przekładni zębatych walcowych pokazano na rys. 7.31.
a) b) c)
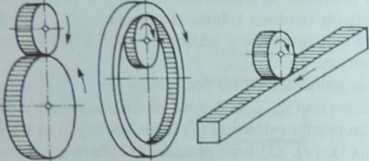
Rysunek 7.31____
Rodzaje przekładni zębatych: a) walcowa zewnętrzna, b) walcowa wewnętrzna, c) zębatkowa (koło zębate + listwa zębata)
Zalety przekładni zębatych w robotach to:
- stała wartość przełożenia,
- duża dokładność przenoszenia ruchu,
- możliwość stosowania przełożeń redukujących i — 1:300,
- praca z dużymi prędkościami obrotowymi n = 100 000 obr/min,
- bardzo duża sprawność rj = 99%,
- zwartość i prostota konstrukcji.
Mimo tak korzystnych zalet przekładnie zębate mają też i wady:
- konieczność smarowania,
- generowanie drgań,
- głośna praca.
W technice przekładnie te są powszechnie stosowane jako mechanizmy przekazywania ruchu. W robotach przemysłowych najczęściej są stosowane przekładnie walcowe oraz przekładnie zębatkowe. Jak podkreślono na wstępie tego podrozdziału, istotnym wymaganiem stawianym przekładniom stosowanym w robotach jest bezluzowość pracy. W tablicy 7.2 zestawiono sposoby kasowa] nia luzu międzyzębnego w przekładniach zębatych [9].
fjblłca 7.2. Sposoby kasowania luzu międzyzębnego w przekładniach zębatych Sposoby kasowania luzu międzyzębnego

“i ; rór
przekładnia o zmiennej korekcji uzębienia «jednym kole. Kasowanie luzu obwodowego następuje przez osiowe przesuwanie kota i współpracującego.
Przekładnia z kołem nożycowym. Kasowanie luzu I obwodowego jest możliwe dzięki wytworzeniu | napięcia wstępnego między dwoma połówkami 'koła nożycowego.
Przekładnia z dwoma parami kół, między którymi jest wytworzone napięcie wstępne.
Przekładnia z jednym kołem podatnym sprężyście I Kasowanie luzu obwodowego następuje dzięki usunięciu luzu wierzchołkowego.
Przekładnia z jednym kołem zamocowanym do : podatnej sprężyście piasty. Kasowanie luzu i obwodowego następuje dzięki usunięciu luzu wierzchołkowego.
fó.1.3. Przekładnie cięgnowe
W stosunku do innych przekładni mechanicznych przekładnie cięgnowe charakte-O^ują się tym, że: odległość osi kół przekładni może być dużo większa od sumy Promieni tych kół oraz istnieje możliwość zmiany kierunku obrotów kół, czasem rownież zmiany rodzaju ruchu. W robotach są stosowane przekładnie cięgnowe:
~ z cięgnem linowym (linowe),
~ z cięgnem łańcuchowym (łańcuchowe),
" z cięgnem pasowym (pasowe).
Wyszukiwarka
Podobne podstrony:
82255 P1080286 7: Napędy robrów przemysłowych Przekładnie mechaniczne robolów powinny charakteryzowa
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
HPIM0824 6. Napędy robolów przemytlowych 6.1. Przeznaczenie napędów i zakres ich
HPIM0830 6. Napędy robolów przemysłowych 6.4.1. Napędy prądu stałego z silnikami komutatorowymi Stos
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
73038 P1080282 7. Napędy robotów przemysłowych o stałej amplitudzie i zwykle stałym okresie oraz mod
więcej podobnych podstron