32534 P1080365
13. Zastosowania robotów przemysłowych

Rysunek 13.9_____________
Algorytm prac)' stanowiska w cyklu automatycznym

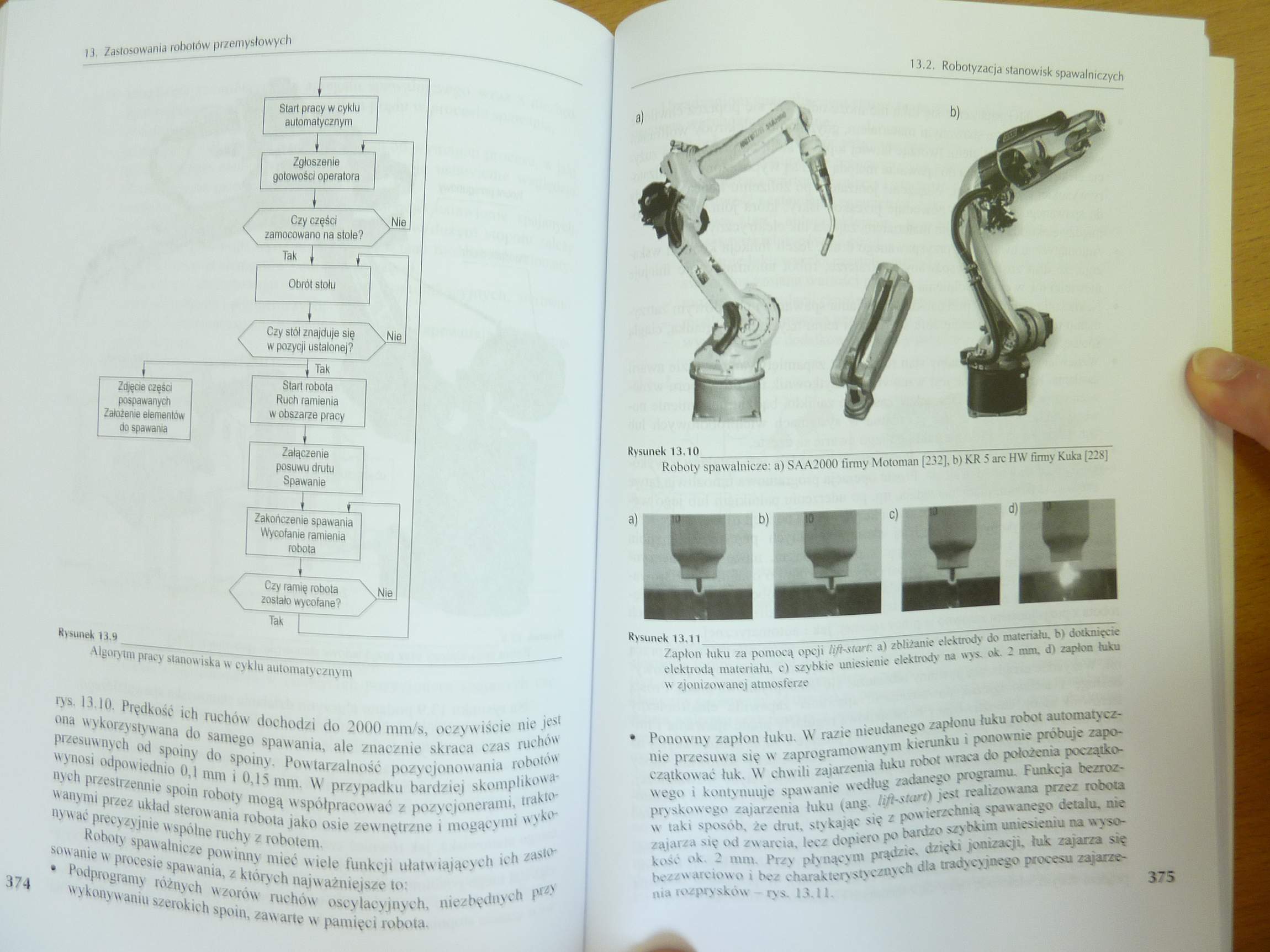
rys. 13.10. Prędkość ich ruchów dochodzi do 2000 mm/s, oczywiście nie jest ona wykorzystywana do samego spawania, ale znacznie skraca czas ruchów przesuwnych od spoiny do spoiny. Pow tarzalność pozycjonowania robotów wynosi odpowiednio 0,1 mm i 0,15 mm. W przypadku bardziej skomplikowanych przestrzennie spoin roboty mogą w spółpracować z pozycjonerami, traktowanymi przez układ sterowania robota jako osie zewnętrzne i mogącymi wykonywać precyzyjnie w spólne ruchy z robotem.
Rohoty spawalnicze pow inny mieć wiele funkcji ułatw tających ich zastosowanie w procesie spaw ania, z których najważniejsze to:
• Podprogramy różnych wzorów' ruchów oscylacyjnych, niezbędnych prz> wykonywaniu szerokich spoin, zawarte w pamięci robota.
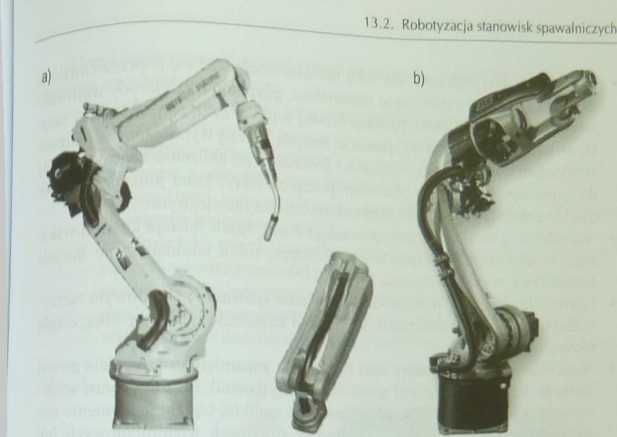
Rysunek 13.10________ _
Roboty spawalnicze: a) SAA2000 firmy Motoman [232], b) KR 5 arc HW firmy Kuka [228]

Rysunek 13.11
Zapłon luku za pomocą opcji tiftstarr. a) zbliżanie elektrody do materiału, b) dotknięcie elektrodą materiału, c) szyhkie uniesienie elektrody na \vys. ok- 2 mm, d) zapłon łuku
w ąjonizowanej atmosferze
Wyszukiwarka
Podobne podstrony:
52317 P1080391 13. Zastosowania robotów przemysłowych Rysunek 13*50___ Robot bramowy w zrobotyzowany
P1080384 13. Zastosowania robotów przemysłowych Rysunek 13.45________ Moduły robotów bramowych
P1080393 13. Zastosowania robotów przemysłowych Rysunek 13.55 Roboty pałetyzujące firmy Famie [255]
P1080392 13. Zastosowania robotów przemysłowych Rysunek 13.52 _ ,v. « o. • ..
HPIM0891 10. Zastosowania robotów przemysłowych Rysunek -—----— Analiza
HPIM0898 10. Zastosowania robotów przemysłowych 10. Zastosowania robotów przemysłowych 5 Rysunek
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
12883 P1080363 13. Zastosowania robotów przemysłowych - łuk utrzymuje się między d
więcej podobnych podstron