HPIM0891

10. Zastosowania robotów przemysłowych
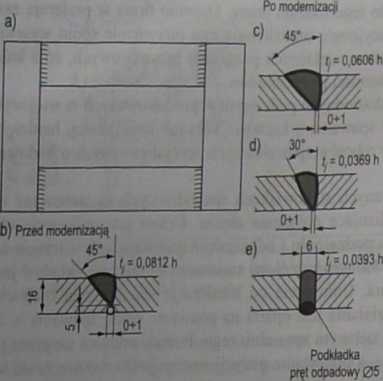
Rysunek -—----—
Analiza konstnikcyjno-technologiczna na przykładzie ramy: a) szkic ramy, b) kształt spoiny i czas spawania T, przed modernizacją, c, d, e) po modernizacji dla pokazanych przypadków [30]
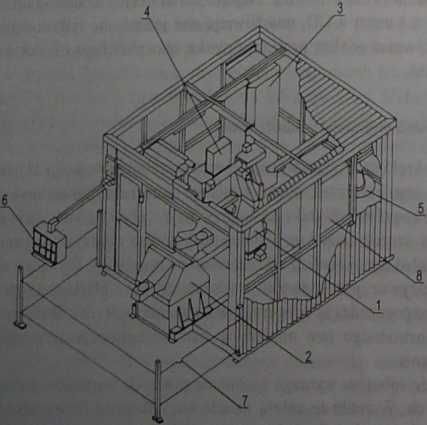
Rysunek 10.14
Zrobotyzowana stacja spawalnicza Weldman firmy Nokia; 1 - robot spawalniczy, 2 - urzą-przedmiotami, 3 - układ sterowania, 4 - przyrządy z filtrem, 6 - pulpit obsługi, 7 - zabezpieczenie fotoko-narzędziowa [97]
Inika. Po uruchomieniu następnych stanowisk struktura obcią-zmienia siS w kierunku coraz większego zaanga-
li iowania sfer produkcji. Al?*'
Rozszerzenie oferty urządzeń do współpracy z robotami oznacza możliwość oferowania kompletnych, zrobotyzowanych stanowisk i stacji. Znajduje SLodzwierciedlenie również w dziedzinie robotów spawalniczych. Należy do j nich zrobotyzowana stacja do spawania łukowego Weldman firmy Nokia (rys. 10.14).
10.2.2. Zrobotyzowane stanowiska zgrzewania
Zgrzewanie jest to. proces trwałego łączenia elementów bez dodania spoiwa, polega ono na nagrzaniu łączonych elementów do stanów ciastowatości, a następnie silnemu dociśnięciu. Rozróżnia się następujące rodzaje zgrzewania: elektryczne, tarciowe, ultradźwiękowe.
W robotyce najczęściej jest stosowane elektryczne zgrzewanie opo^ rowe, które ze względu na sposób otrzymania i kształt zgrzeiny (miejsca połączenia elementów) dzieli się na: punktowe (rys. 10.15), garbowe (punktowe wmiejscach występów-garbów), liniowe, zwarciowe (silny docisk zgrzewanych ejementów) oraz iskrowe (docisk niewielki zapewniający styk prądowy w kilku pniejscach). Zakres stosowania zgrzewania oporowego jest bardzo szeroki: zgrzewanie punktowe stosuje się w produkcji samochodów, samolotów, wagonów tolejowych i galanterii metalowej, zgrzewanie garbowe - w produkcji samochodów, lodówek, zgrzewanie liniowe - do wytwarzania zbiorników cienkościennych i rur, zgrzewanie zwarciowe oraz iskrowe - do łączenia szyn kolejowych, prętów zbrojeniowych, ogniw łańcuchów, obręczy kół rowerowych. Zrobotyzowane zgrzewanie punktowe jest stosowane jednak przede wszystkim w przemyśle motoryzacyjnym, w procesie budowy karoserii samochodowych. Dla przykładu można podać, że proces montażu karoserii samochodu Golf w firmie Volkswagen jest zrobotyzowany w ponad 90%.
, Szczególnie łatwy do robotyzacji jest proces zgrzewania punktowego ze względu na dokładność osiąganą przez roboty i możliwość wykonania zgrzeiny
:k -----—~ ggpga assassąg
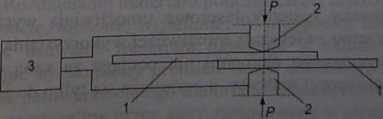
Proces zgrzewania punktowego, / docisku
ysunek 10.15
- łączone blachy. 2 - elektrody. 11 źródło prądu, n - ah
Wyszukiwarka
Podobne podstrony:
HPIM0898 10. Zastosowania robotów przemysłowych 10. Zastosowania robotów przemysłowych 5 Rysunek
HPIM0897 ■ 10. Zaścósovvahia robotów przemysłowych Rysunek
HPIM0896 10. Zastosowania robolów przemysłowych Roboty bramowe liniowe są stosowane głównie do za- i
32534 P1080365 13. Zastosowania robotów przemysłowych Rysunek 13.9_____________ Algorytm prac) stan
52317 P1080391 13. Zastosowania robotów przemysłowych Rysunek 13*50___ Robot bramowy w zrobotyzowany
P1080384 13. Zastosowania robotów przemysłowych Rysunek 13.45________ Moduły robotów bramowych
P1080393 13. Zastosowania robotów przemysłowych Rysunek 13.55 Roboty pałetyzujące firmy Famie [255]
P1080392 13. Zastosowania robotów przemysłowych Rysunek 13.52 _ ,v. « o. • ..
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
HPIM0892 w HHHHH 10. Zastotowanu robotów przemysłowych■■ w dowolnym położeniu. Roboty stosowane do
więcej podobnych podstron