HPIM0896
10. Zastosowania robolów przemysłowych
Roboty bramowe liniowe są stosowane głównie do za- i wyładunku przedmiotów w autonomicznych stacjach obróbkowych. W przypadku konieczności obsługi magazynów wielopoziomowych, np. stosów palet, muszą współpracować ze specjalnymi urządzeniami przekładającymi palety. Przykład takiego rozwiązania przedstawiono na rys. 10.22c.
Jeżeli istotnym czynnikiem efektywnego zastosowania robotyzacji jest możliwość obsługi większej liczby obrabiarek przez jednego róbota, to bardzo korzystnym rozwiązaniem jest zastosowanie robota bramowego powierzchniowego.
Manipulatory bramowe manipulują często w ASO nie tylko przedmiotami obrabianymi, ale i narzędziami. W takich przypadkach na tej samej konstrukcji bramy i na tych samych prowadnicach znajdują się czasami dwa niezależne wózki z chwytakami - jeden do przedmiotów drugi do narzędzi.
Istotnym zespołem we wszystkich urządzeniach manipulacyjnych są chwytaki. Dzielą się one na: pojedyncze i podwójne, przy czym w tej ostatniej grupie można wyróżnić usytuowanie równoległe, szeregowe i kątowe poszczególnych par szczęk [5], Ze względu na minimalizacje czasu manipulowania najczęściej stosowanymi chwytakami są chwytaki podwójne nawet do cięższych przedmiotów.
Podstawowym wymaganiem stawianym chwytakom manipulatorów bramowych jest zapewnienie możliwości dopasowywania, w jak największym zakresie, do różnych wymiarów przedmiotów [31]. Jeżeli zróżnicowanie wymiarów przedmiotów obrabianych w ASO/ESO jest zbyt duże, aby ich manipulację mógł zapewnić jeden chwytak, wymiana chwytaków może odbywać się automatycznie [5].
Duże wymagania stawia się również magazynom przedmiotów obrabianych. Dąży się do tego, żeby magazyny zapewniały możliwość pracy bezobsłu-gowej możliwie jak najdłużej, najlepiej w czasie jednej zmiany. Każde stanowisko powinno być tak zaprojektowane, żeby w przypadku awarii jednej z obrabiarek była możliwa współpraca robota z pozostałymi obrabiarkami, a w przypadku awarii robota była możliwość obsługi obrabiarek przez operatora. Takie rozwiązanie zabezpiecza przed przestojami całego gniazda w przypadku awarii jednego z urządzeń. Organizacja zrobotyzowanego gniazda zależy od wielu czynników, z których najważniejsze to [92]:
- miejsce instalowania oraz liczba obsługiwanych przez robota obrabiarek,
- ustawienie obrabiarek w hali produkcyjnej* np. w postaci gniazda lub linii produkcyjnej,
I proces technologiczny obróbki.
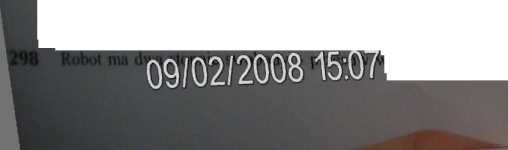
Na rysunku 10.23 pokazano typowe rozwiązanie autonomicznej stacji obróbki tokarskiej, a jej widok z góry - na rys. 10.24. Do obsługi tokarki zastosowano robot portalowy, umieszczony nad maszyną, który pobiera przedmioty (przygotówki) znajdujące się w paletach przemieszczających się na przenośniku.
/zdłużny i pionowy, które wystar-

Ljq do pobrania przedmiotów ułożonych w jednym rzędzie na palecie i włożę-„je do uchwytu tokarskiego (także w cyklu odwrotnym). Trzeci stopień swobody f (o przesuw palety na przenośniku, który umożliwia pobieranie i odkładanie Uprzedmiotów z więcej niż jednego rzędu na palecie..
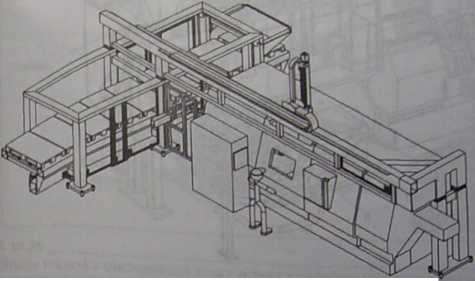
Rysunek 10.23
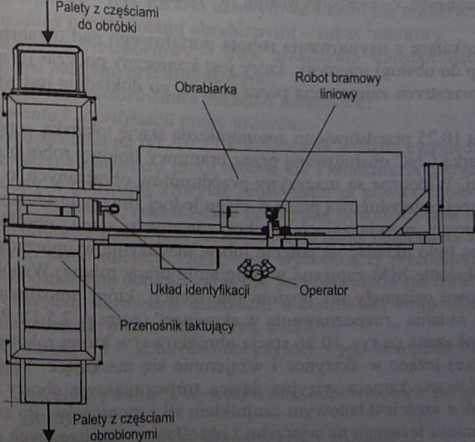
Rysunek 10.24_ " ':__ ___!-—
Widok z góry autonomicznej stacji obróbki tokarskiej z tyś. 10.23
Wyszukiwarka
Podobne podstrony:
HPIM0891 10. Zastosowania robotów przemysłowych Rysunek -—----— Analiza
HPIM0898 10. Zastosowania robotów przemysłowych 10. Zastosowania robotów przemysłowych 5 Rysunek
HPIM0900 10. Zastosowania robolów przemysłowych wane stanowisko, autonomiczną stację lub linię monta
HPIM0871 8. Urządzenia chwytające robolów przemysłowych a wartość kąta fi— z układu równań acos(a —
HPIM0895 10. Złtlowwna robolów ptawy>lo»ydi RpuncklOJIfr _ Zidbotyzcmanc maszyn
HPIM0897 ■ 10. Zaścósovvahia robotów przemysłowych Rysunek
Klasyfikacja robolów przemysłowych: Roboty dzieli się przy wyróżnieniu klasy i możliwości sterowania
Zastosowanie robotów w przemyśle: Roboty przemysłowe stosuje się w celu zastąpienia ludzi w pracy na
86458 P1080378 13. Zastosowania robotów przemysłowych roboty przemysłowe osiągnęły już poziom inteli
P1080370 13. Zastosowania robolów przemysłowych 13. Zastosowania robolów przemysłowych czasie, a wię
430 10. ZASTOSOWANIA UKŁADÓW PRZEKSZTAŁTNIKOWYCH wych wektora prądu o kierunkach zgodnym i prostopad
Izba Przemysłowo-Handlowa we Lwowie; Andrzejostwo XX Lubomirscy we Lwowie. Zwolnienia są stosowane t
Slajd18 Rodzaje gwintów i ich zastosowanie Gwinty jednokrotne są stosowane głównie we wszystkich poł
Wykresy liniowe są najprostszą i najłatwiejszą do sporządzenia graficzną formą prezentacji danych
więcej podobnych podstron