78152 P1080274
7, Napędy robotów przemysłowych
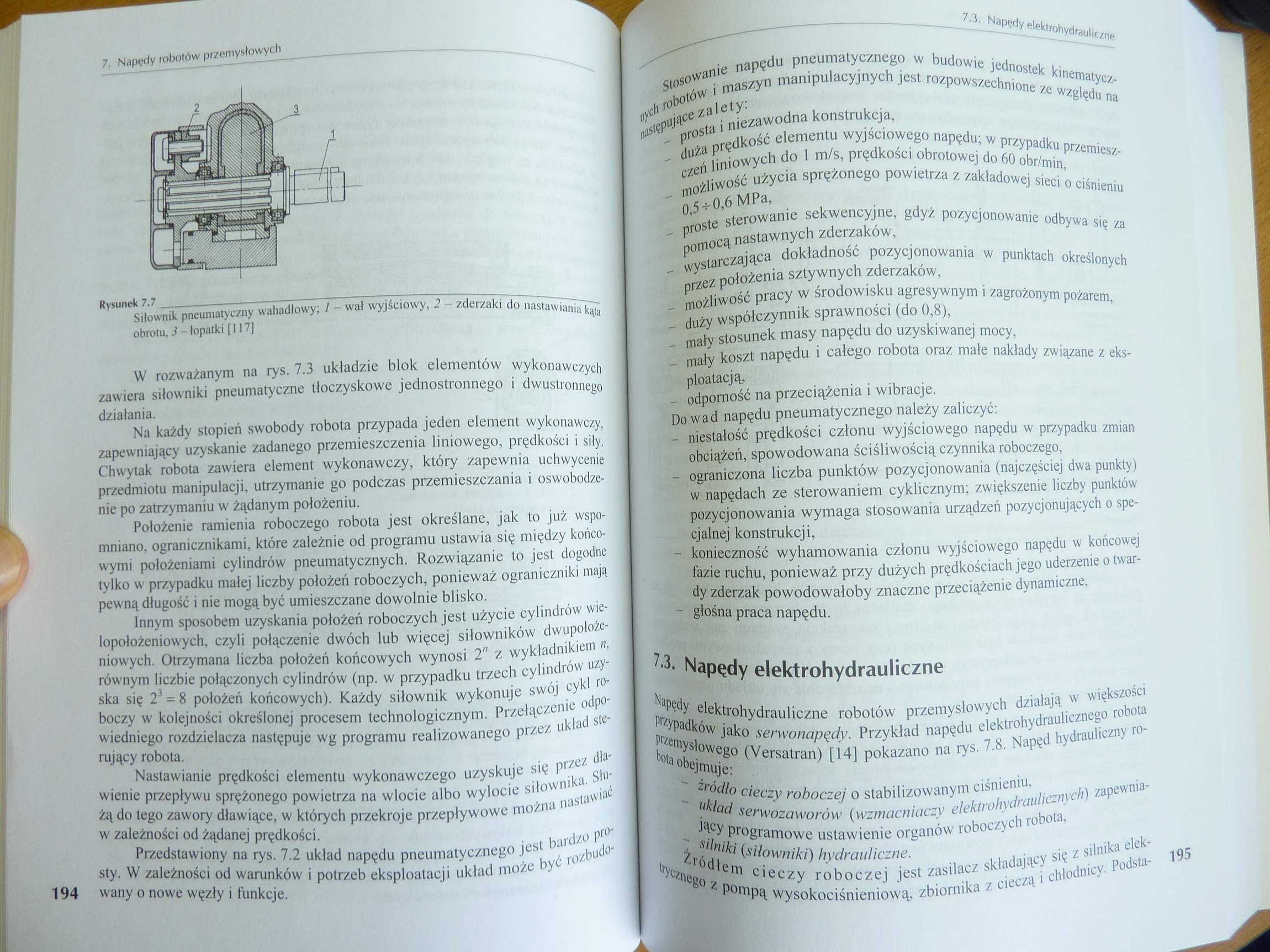
Rysunek 7;7', ^ - . •- - • - - _ ______
Siłownik pneumatyczny wahadłowy; V - wał wyjściowy, 2 - zderzaki do nastawiania kąta obrotu, 3 - łopatki [117]
W rozważanym na rys. 7.3 układzie blok elementów wykonawczych zawiera siłowniki pneumatyczne tłoczyskowe jednostronnego i dwustronnego działania.
Na każdy stopień swobody robota przypada jeden element wykonawczy, zapewniający uzyskanie zadanego przemieszczenia liniowego, prędkości i siły. Chwytak robota zawiera element wykonawczy, który zapewnia uchwycenie przedmiotu manipulacji, utrzymanie go podczas przemieszczania i oswobodzenie po zatrzymaniu w żądanym położeniu.
Położenie ramienia roboczego robota jest określane, jak to już wspomniano, ogranicznikami, które zależnie od programu ustawia się między końcowymi położeniami cylindrów pneumatycznych. Rozwiązanie to jest dogodne: tylko w przypadku małej liczby położeń roboczych, ponieważ ograniczniki mają pewną długość i nie mogą być umieszczane dowolnie blisko.
Innym sposobem uzyskania położeń roboczych jest użycie cylindrów wie-lopołoźeniowych, czyli połączenie dwóch lub więcej siłowników dwupołoże-niowych. Otrzymana liczba położeń końcowych wynosi 2" z wykładnikiem n, równym liczbie połączonych cylindrów (np. w przypadku trzech cylindrów uzyska się T - 8 położeń końcowych). Każdy siłownik wykonuje swój cykl roboczy w kolejności określonej procesem technologicznym. Przełączenie odpowiedniego rozdzielacza następuje wg programu realizowanego przez układ sterujący robota.
Nastawianie prędkości elementu wykonawczego uzyskuje się przez dławienie przepływu sprężonego powietrza na wlocie albo wylocie siłownika. Służą do tego zawory dławiące, w których przekroje przepływowe można nastawiać w zależności od żądanej prędkości.
Przedstawiony na rys. 7.2 układ napędu pneumatycznego jest bardzo pro-1 sty. W zależności od warunków i potrzeb eksploatacji układ może być rozbudo* I wany o nowe węzły i funkcje.
Stosowanie napędu pneumatycznego w budowie jednostek kinematycz-„ych robotów i maszyn manipulacyjnych jest rozpowszechnione ze względu na „Upuj^e zalety:
- prosta i niezawodna konstrukcja,
- duża prędkość elementu wyjściowego napędu; w przypadku przemieszczeń liniowych do 1 m/s, prędkości obrotowej do 60 obr/min,
- możliwość użycia sprężonego powietrza z zakładowej sieci o ciśnieniu 0,510,6 MPa,
- proste sterowanie sekwencyjne, gdyż pozycjonowanie odbywa się za pomocą nastawnych zderzaków,
- wystarczająca dokładność pozycjonowania w punktach określonych przez położenia sztywnych zderzaków,
- możliwość pracy w środowisku agresywnym i zagrożonym pożarem,
- duży współczynnik sprawności (do 0,8),
- mały stosunek masy napędu do uzyskiwanej mocy,
- mały koszt napędu i całego robota oraz małe nakłady związane z eksploatacją,
- odporność na przeciążenia i wibracje.
Do wad napędu pneumatycznego należy zaliczyć:
- niestałość prędkości członu wyjściowego napędu w przypadku zmian obciążeń, spowodowana ściśliwością czynnika roboczego,
- ograniczona liczba punktów pozycjonowania (najczęściej dwa punkty) w napędach ze sterowaniem cyklicznym; zwiększenie liczby punktów pozycjonowania wymaga stosowania urządzeń pozycjonujących o specjalnej konstrukcji,
- konieczność wyhamowania członu wyjściowego napędu w końcowej fazie ruchu, ponieważ przy dużych prędkościach jego uderzenie o twardy zderzak powodowałoby znaczne przeciążenie dynamiczne,
- głośna praca napędu.
'•& Napędy elektrohydrauliczne
wypadków jako Pomysłowego ( °°la obejmuje:
Napędy elektrohydrauliczne robotów przemysłowych działają w większości serwonapędy. Przykład napędu elektrohydraulicznego robota yersatran) [14] pokazano na rys. 7.8. Napęd hydrauliczny ro-
źródło cieczy roboczej o stabilizowanym ciśnieniu,
~ układ serwozaworów (wzmacniaczy elektrohydraulicznych) zapewniający programowe ustawienie organów roboczych robota,
~ silniki (siłowniki) hydrauliczne.
( Źródłem cieczy roboczej jest zasilacz składający się z silnika elek-cznego z pompą wysokociśnieniową, zbiornika z cieczą i chłodnicy. Podsta- 195
Wyszukiwarka
Podobne podstrony:
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
P1080280 7. Napędy robotów przemysłowych Rysunek"/ ______ Bezkomulatorowy s
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
76806 P1080214 3, Minlmv.i robotów przemysłowych Rysunek 3J7 . Robot o strukturze
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
więcej podobnych podstron