24 luty 07 (149)
Podstawowymi składnikami budowy mechanizmów prostych i złożonych są grupy strukturalne klasy 2 oraz człon napędzający wykonujący ruch obrotowy.
Program umożliwia ponadto modelowanie dwóch wariantów mechanizmów krzywkowych:
- krzywka obrotowa:
1) popychacz ostrzowy o ruchu liniowym,
2) popychacz ostrzowy o ruchu wahliwym,
- odpowiednich mechanizmów krzywkowo-dźwigniowych.
W celu symbolicznego zapisu grup strukturalnych i mechanizmów przyjęto w programie AKM następujące oznaczenia:
N - człon napędzający,
O - para kinematyczna obrotowa,
P - para kinematyczna postępowa,
Os - para kinematyczna utworzona przez podstawę i obracający się suwak,
Op - para kinematyczna utworzona przez podstawę i obracającą się prowadnicę, kreska rozdzielająca „-"oznacza człon mechanizmu.
W programie AKM utworzono dziewięć gotowych obiektów - wariantów grup strukturalnych, których schematy zapisane symbolicznie przedstawia tablica 4.1. Przy tworzeniu tych obiektów uwzględniono pięć podstawowych postaci grup strukturalnych kl. II oraz dodatkowo kolejność par kinematycznych począwszy od członu napędzającego aż do połączenia grupy z podstawą. Warianty grup strukturalnych po połączeniu z członem napędzającym tworzą zarazem zbiór dziewięciu mechanizmów podstawowych.
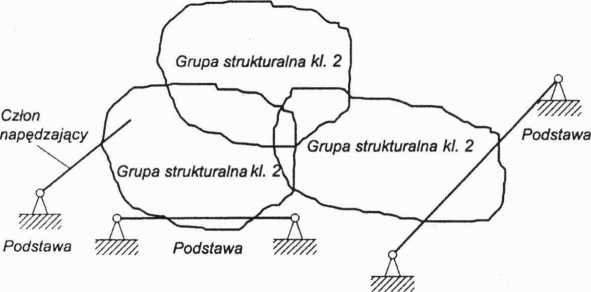
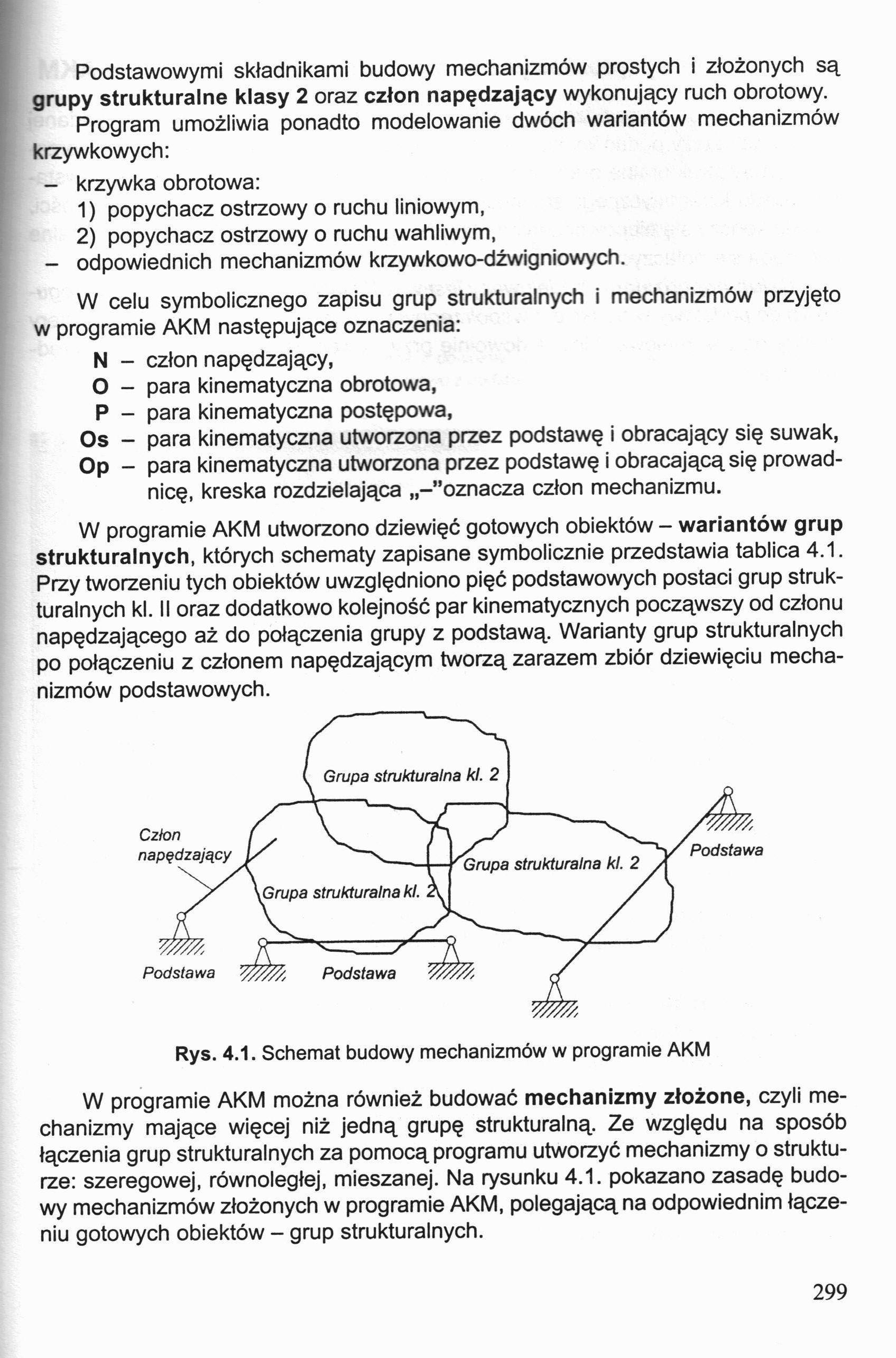
Rys. 4.1. Schemat budowy mechanizmów w programie AKM
W programie AKM można również budować mechanizmy złożone, czyli mechanizmy mające więcej niż jedną grupę strukturalną. Ze względu na sposób łączenia grup strukturalnych za pomocą programu utworzyć mechanizmy o strukturze: szeregowej, równoległej, mieszanej. Na rysunku 4.1. pokazano zasadę budowy mechanizmów złożonych w programie AKM, polegającą na odpowiednim łączeniu gotowych obiektów - grup strukturalnych.
299
Wyszukiwarka
Podobne podstrony:
24 luty 07 (34) Moc sił tarcia w mechanizmach zależy od wielu parametrów konstrukcyjnych, kinematycz
24 luty 07 (147) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW Rozwiązywanie zagadnień analizy me
24 luty 07 (159) Literatura [1] Artobolewskij I.I.: Tieorija mechanizmov i maszin.
24 luty 07 (36) Całkowitą moc traconą w mechanizmie wyznaczamy, sumując moce tracone w jego wszystki
24 luty 07 (64) 3.6.4. Wyrównoważanie statyczne płaskich mechanizmów dźwigniowych W wielu przypadkac
24 luty 07 (65) W trakcie ruchu niewyrównoważonego mechanizmu środek masy porusza się po torze o wsp
24 luty 07 (9) Rys. 3.41. Analiza siłowa mechanizmu krzywkowego: a) mechanizm krzywkowy z popycha-cz
24 luty 07 (55) Rys. 3.75. Wektor główny sił bezwładności i moment główny sił bezwładności oraz równ
24 luty 07 (80) Występujące we wzorach (3.96) i (3.97) wyrażenia O2 (0: f 2 (Oi zr zr(O, oraz co,
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (113) Na podstawie planu prędkości otrzymamy: VS1 = ai ■ ias1 ~ VI lAS1 VS2 =(01 h =<
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (12) Zasada mocy chwilowych. Jeżeli mechanizm złożony z członów sztywnych połączonych ze
24 luty 07 (132) Dobór koła zamachowego na podstawie równania różnicowego (P3.264) Rozważaną metodę
24 luty 07 (135) Własności mechaniczne zespołów układu napędowego opisują tzw. charakterystyki mecha
24 luty 07 (13) Na podstawie rysunku 3.42 odczytujemy wartości kątów: (Mr1, co-,) = 0°, (Mb2, W2) =
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (148) 4.1.1. Zasady modelowania mechanizmów w programie AKMBudowa mechanizmów dźwigniowyc
24 luty 07 (150) 4.1.2. Cechy geometryczne mechanizmów w programie AKM W celu przeprowadzenia analiz
więcej podobnych podstron