24 luty 07 (114)
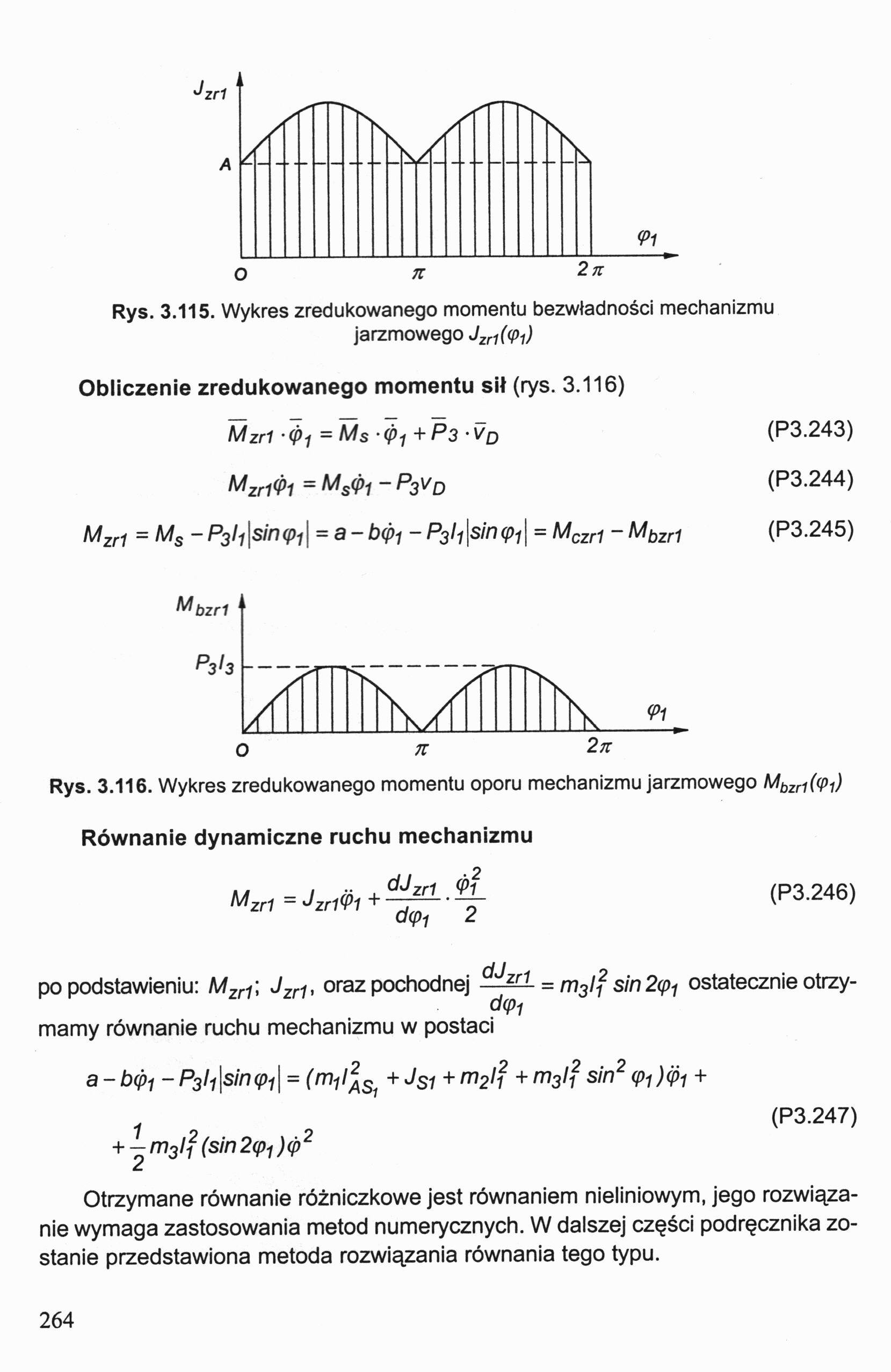
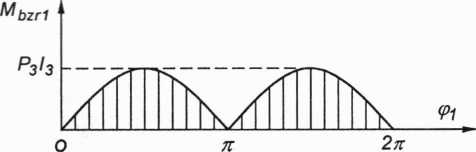
Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi)
Obliczenie zredukowanego momentu sił (rys. 3.116)
Mzri - (Pi = Ms -(pf + P3 - Vp (P3.243)
Mzr1(Pt =Ms((>1-P3vd (P3.244)
Mzr1 =MS- P3l1\sirup1\ = a - bęi - PJ^sincp^ = Mczr1 - Mbzr1 (P3.245)
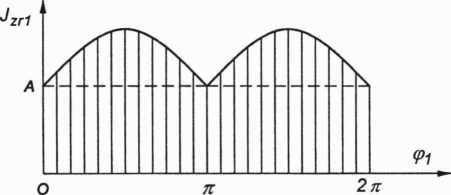
Rys. 3.116. Wykres zredukowanego momentu oporu mechanizmu jarzmowego Mbzr1(q>i) Równanie dynamiczne ruchu mechanizmu
Mzr,=J2rt«i,+^-4- (P3'246)
dcpi 2
dJ
po podstawieniu: Mzr1; Jzr1, oraz pochodnej u zr1 = m3li sin 2(pf ostatecznie otrzy-
d(pi
mamy równanie ruchu mechanizmu w postaci
a-bę-j - P^lsincpi] = (m-,1+ JS1 + m2li + m3l? sin2 (p1)(pi +
1 (P3.247)
+ -m3lf (sin2(p1)(p2
Otrzymane równanie różniczkowe jest równaniem nieliniowym, jego rozwiązanie wymaga zastosowania metod numerycznych. W dalszej części podręcznika zostanie przedstawiona metoda rozwiązania równania tego typu.
264
Wyszukiwarka
Podobne podstrony:
24 luty 07 (123) gdzie: Jzr - całkowity zredukowany moment bezwładności układu napędowego z kołem za
24 luty 07 (55) Rys. 3.75. Wektor główny sił bezwładności i moment główny sił bezwładności oraz równ
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (20) Rys. 3.48. Analiza wykreślna warunku równowagi granicznej członu podpartego na podpo
24 luty 07 (151) Rys. 4.3. Człony typu łącznik wraz z elementami określającymi położenie wybranych p
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 (16) Rys. 3.43. Stożek tarcia pary kinematycznej Rkt = -R,k - całkowita reakcja w parze p
24 luty 07 (22) Rys. 3.50. Tarcie w parze kinematycznej obrotowej Zjawisko tarcia oraz związane z ni
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
24 luty 07 (54) Rys. 3.74. Model fizyczny niewyrównoważonego wirnika w postaci cienkich niewyrównowa
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
24 luty 07 (156) 4.2. PROGRAM SAM- Simulation and Analysis of Mechanisms Program SAM [17] przeznaczo
24 luty 07 (26) Etap 2. Analiza sił działających na człony mechanizmu bez uwzględnienia tarcia Zadan
24 luty 07 (27) Etap 3. Analiza sił działających na człony mechanizmu z uwzględnieniem sił tarcia Pr
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
więcej podobnych podstron