24 luty 07 (20)
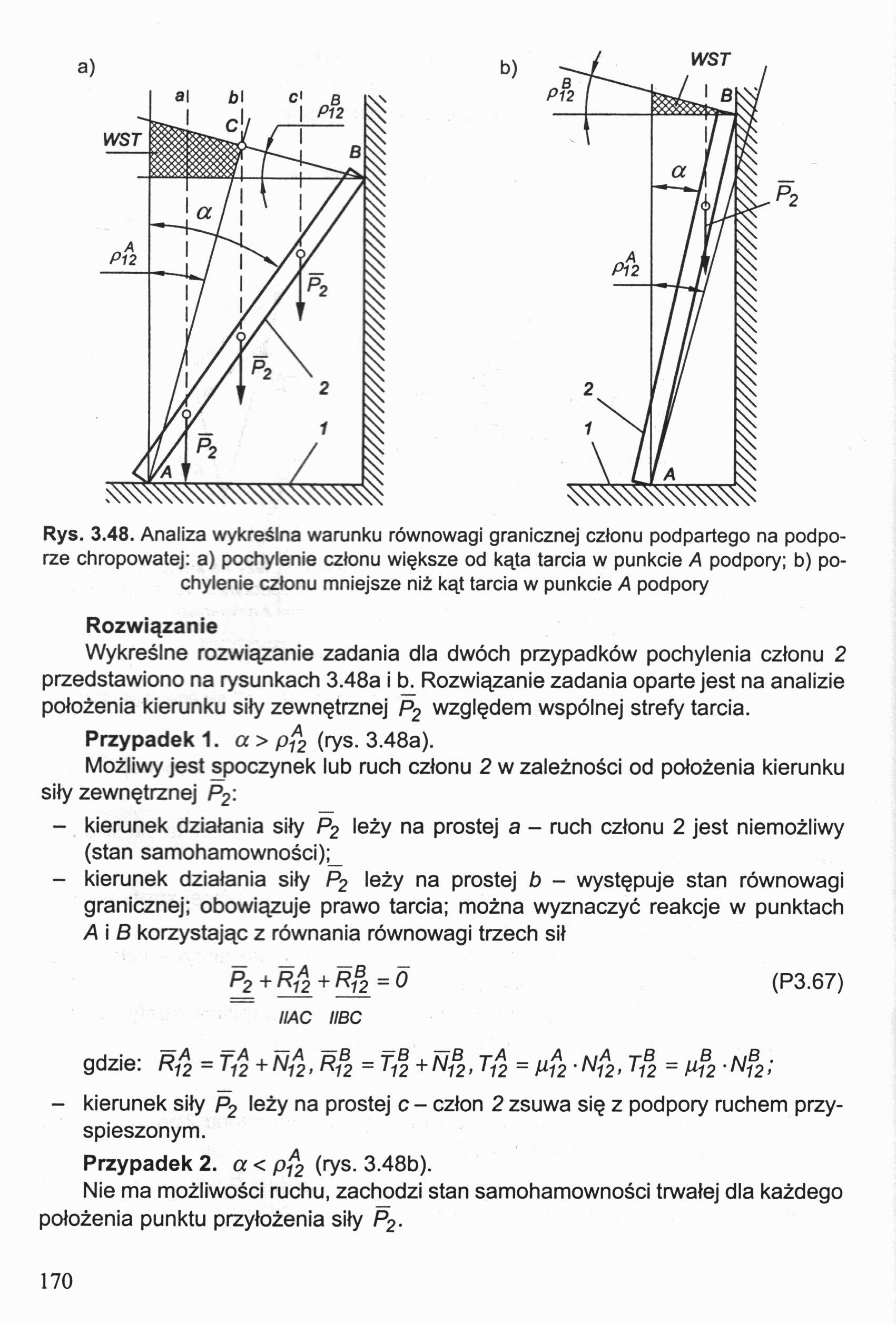

Rys. 3.48. Analiza wykreślna warunku równowagi granicznej członu podpartego na podporze chropowatej: a) pochylenie członu większe od kąta tarcia w punkcie A podpory; b) pochylenie członu mniejsze niż kąt tarcia w punkcie A podpory
Rozwiązanie
Wykreślne rozwiązanie zadania dla dwóch przypadków pochylenia członu 2 przedstawiono na rysunkach 3.48a i L Rozwiązanie zadania oparte jest na analizie położenia kierunku siły zewnętrznej P2 względem wspólnej strefy tarcia. Przypadek 1. a> pf2 (rys. 3.48a).
Możliwy jest spoczynek lub ruch członu 2 w zależności od położenia kierunku siły zewnętrznej P2:
- kierunek działania siły P2 leży na prostej a - ruch członu 2 jest niemożliwy (stan samohamowności);_
- kierunek działania siły P2 leży na prostej b - występuje stan równowagi granicznej; obowiązuje prawo tarcia; można wyznaczyć reakcje w punktach A i B korzystając z równania równowagi trzech sił
P2_ + RA+R^_ = 0 (P3.67)
IIAC IIBC
gdzie; P?2 = T12 + Ni2’ R1&2 = T12 + N1B2< Ti2 = P12 • Ni2’ = P?2 '
- kierunek siły p2 leży na prostej c - człon 2 zsuwa się z podpory ruchem przyspieszonym.
Przypadek 2. a < pf2 (rys. 3.48b).
Nie ma możliwości ruchu, zachodzi stan samohamowności trwałej dla każdego położenia punktu przyłożenia siły P2.
170
Wyszukiwarka
Podobne podstrony:
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (147) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW Rozwiązywanie zagadnień analizy me
24 luty 07 (151) Rys. 4.3. Człony typu łącznik wraz z elementami określającymi położenie wybranych p
24 luty 07 (16) Rys. 3.43. Stożek tarcia pary kinematycznej Rkt = -R,k - całkowita reakcja w parze p
24 luty 07 (22) Rys. 3.50. Tarcie w parze kinematycznej obrotowej Zjawisko tarcia oraz związane z ni
24 luty 07 (54) Rys. 3.74. Model fizyczny niewyrównoważonego wirnika w postaci cienkich niewyrównowa
24 luty 07 (55) Rys. 3.75. Wektor główny sił bezwładności i moment główny sił bezwładności oraz równ
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
24 luty 07 (135) Własności mechaniczne zespołów układu napędowego opisują tzw. charakterystyki mecha
24 luty 07 (3) Metoda Culmana umożliwia rozwiązanie graficzne zagadnienia równowagi czterech sił o z
24 luty 07 (53) Jeśli spełnione są równocześnie warunki (3.69) / (3.70), wówczas oś obrotu jest głów
24 luty 07 (2) c* ^ b) Rys. 3.36. Analiza sił działających na człon napędzający: a) uwalnianie od wi
24 luty 07 (30) Etapy 2 i 3. Analiza statyczna (rys. 3.59) Etap 2. Analiza sił działających na człon
24 luty 07 (58) Przykład 3.20 Dany jest wirnik o masie M obracający się wokół osi Oz z prędkością ką
24 luty 07 (6) Rys. 3.39. Analiza statyczna grupy strukturalnej P-0-0 z wykorzystaniem prostej Culma
więcej podobnych podstron