24 luty 07 (35)
Współczynnik sprawności można wyznaczyć analitycznie, korzystając ze wzorów (3.51). W tym celu należy określić moc traconą w parach kinematycznych NT.
Możliwe jest również określenie współczynnika sprawności metodą graficzną co jest szczególnie przydatne w przypadku mechanizmów dźwigniowych i krzywkowych.
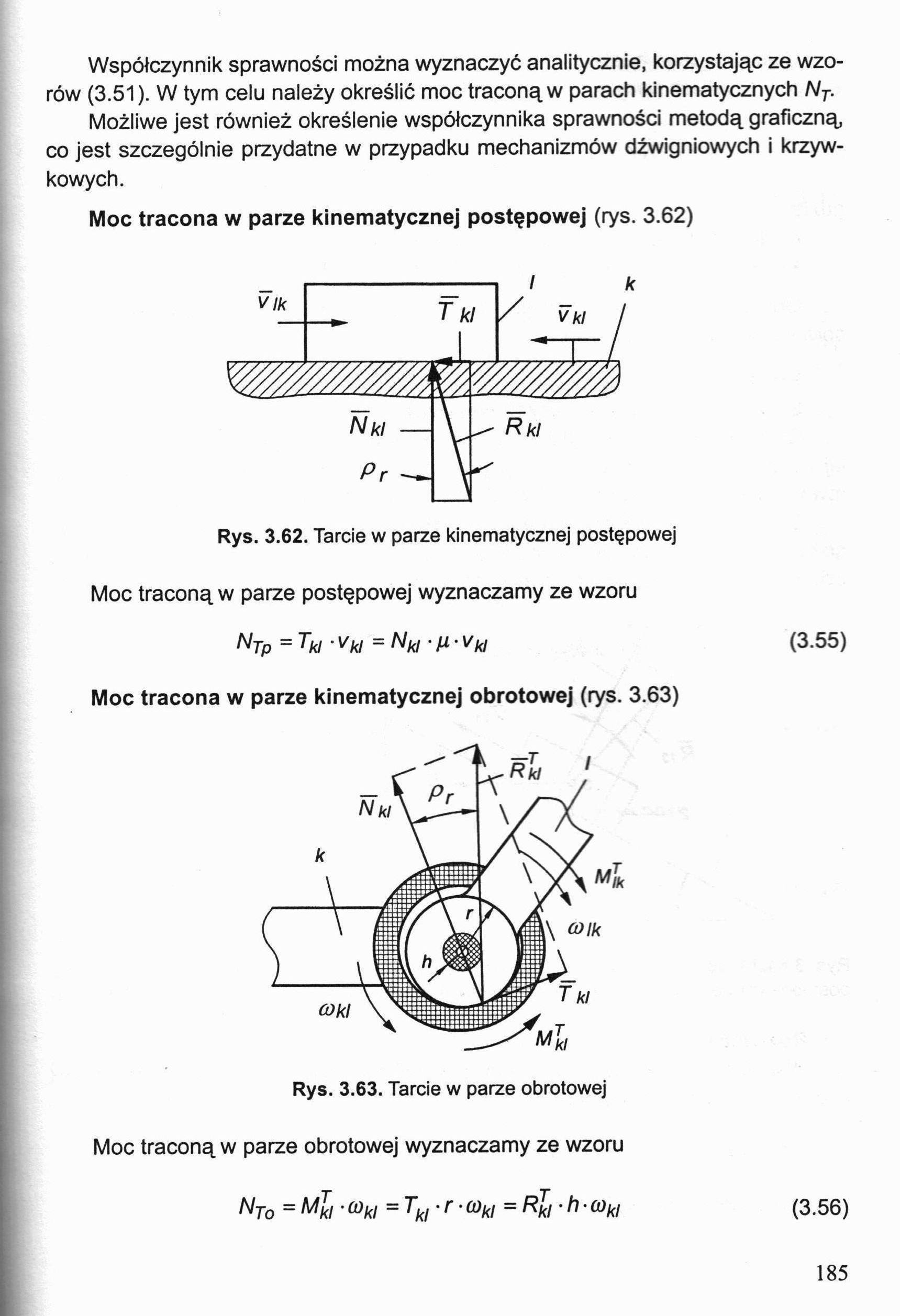
Moc tracona w parze kinematycznej postępowej (rys. 3.62)
Moc traconą w parze postępowej wyznaczamy ze wzoru
Nrp = Tu ■ vM = Nki ■ ii ■ vk/ (3.55)
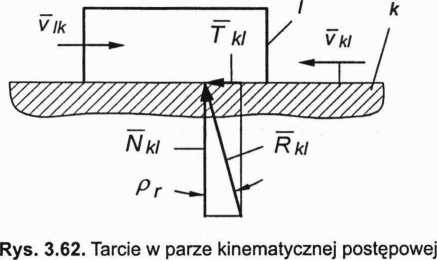
Moc tracona w parze kinematycznej obrotowej (rys. 3.63)
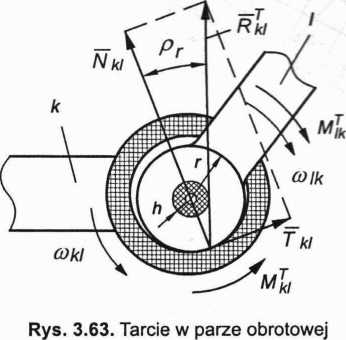
Moc traconą w parze obrotowej wyznaczamy ze wzoru
NTo = Mu ■ a>u = Vr• =Ru-h-cok, (3.56)
185
Wyszukiwarka
Podobne podstrony:
24 luty 07 (133) Do obliczeń można wykorzystać programy matematyczne np. program MATLAB lub arkusz k
24 luty 07 (153) W programie AKM można modelować grupę strukturalną w ten sposób, że będzie mieć pun
o równoległych krawędziach tnących, można wyznaczyć przybliżoną wartość siły cięcia Psk. W tym celu
236 (42) otrzymamy - 236 - - 237 - je zadanie to można też rozwiązać korzystając ze wzorów na _ t
24 luty 07 (129) Wyznaczamy współczynnik nierównomierności biegu, korzystając z jego definicji: cośr
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (119) Można w ten sposób badać rozruch układu napędowego przyjmując zerowe warunki począt
24 luty 07 (136) Można wyróżnić cztery rodzaje teoretycznych charakterystyk silników.1)
24 luty 07 (139) Sterowanie parametrami kinematycznymi układu napędowego można przeprowadzać różnymi
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
24 luty 07 (32) Ramię tarcia tocznego f (ramię oporu toczenia) nazywane jest także współczynnikiem t
24 luty 07 (36) Całkowitą moc traconą w mechanizmie wyznaczamy, sumując moce tracone w jego wszystki
24 luty 07 (41) Sprawność mechanizmu wynosi ri = ^=/3"C =1, gdyż
24 luty 07 (45) Sprawność chwilowa dla przyjętych na rysunku parametrów geometrycznych mechanizmu kr
więcej podobnych podstron