24 luty 07 (49)
strumieni gazów lub cieczy, pól magnetycznych lub elektrycznych itp. Przykładem takiej masy wirującej mogą być np. wirniki silnika elektrycznego, wiertarki, dmuchawy, turbiny itp.
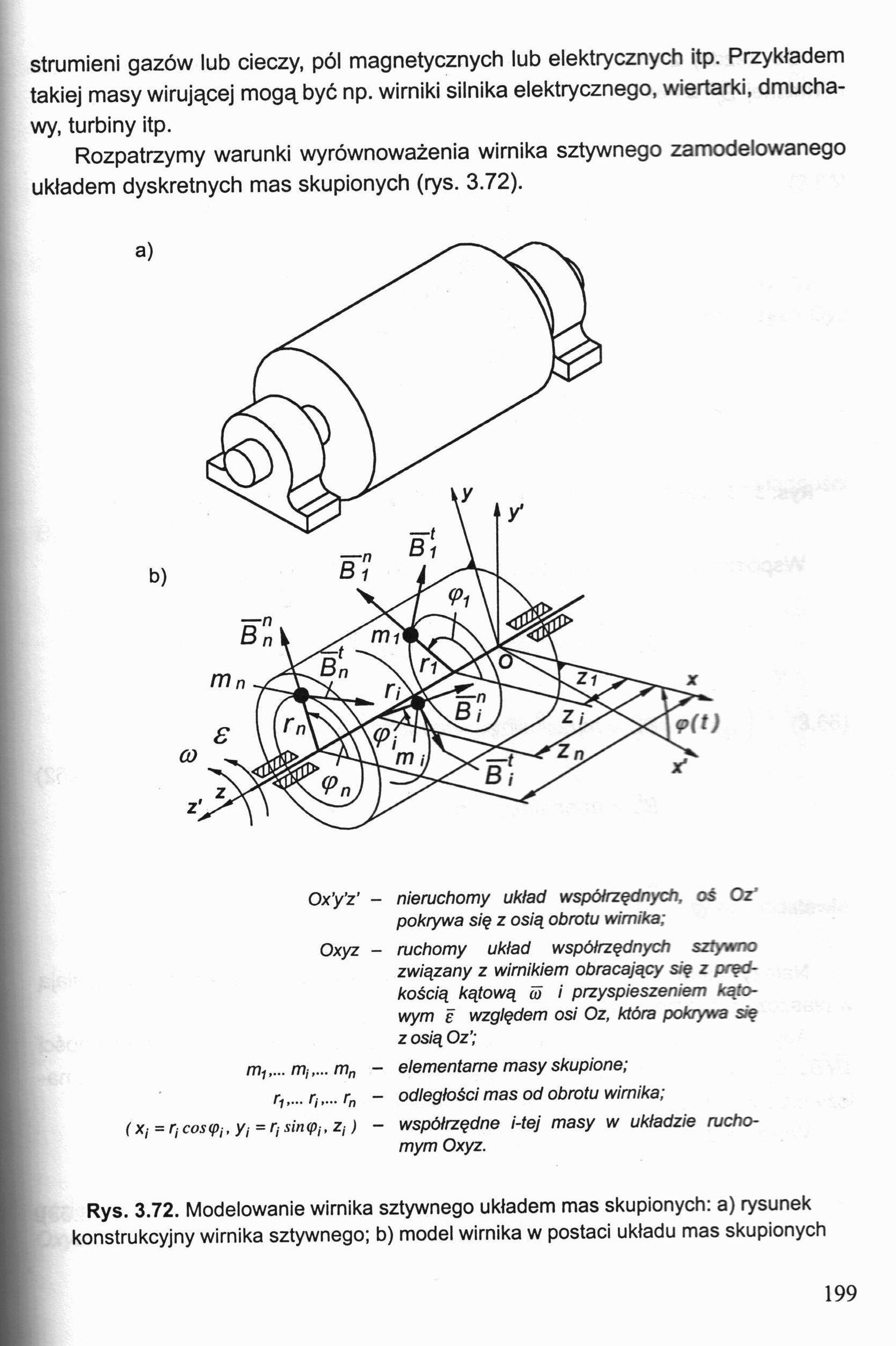
Rozpatrzymy warunki wyrównoważenia wirnika sztywnego zamodelowanego układem dyskretnych mas skupionych (rys. 3.72).
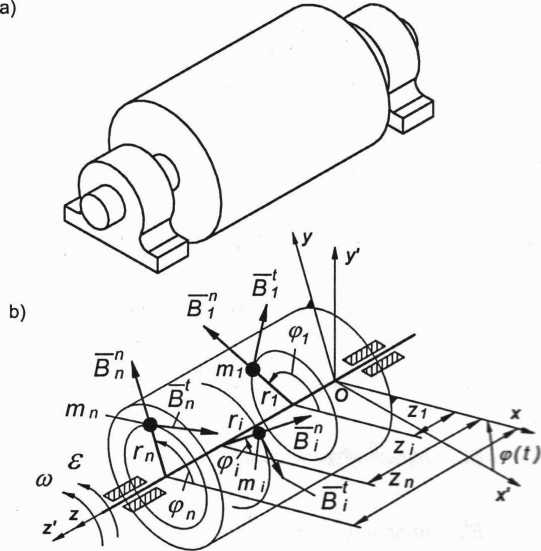
Ox’y’z' - nieruchomy układ współrzędnych, oś Ot pokrywa się z osią obrotu wirnika;
Oxyz - ruchomy układ współrzędnych sztywno związany z wirnikiem obracający się z prędkością kątową cii i przyspieszeniem kątowym ś względem osi Oz, która pokrywa się z osią Oz’;
m,,... mi,... m„ />,... r„... rn (xi = rj cosipj, yi = r, siny,, z,)
elementarne masy skupione; odległości mas od obrotu wirnika; współrzędne i-tej masy w układzie ruchomym Oxyz.
Rys. 3.72. Modelowanie wirnika sztywnego układem mas skupionych: a) rysunek konstrukcyjny wirnika sztywnego; b) model wirnika w postaci układu mas skupionych
199
Wyszukiwarka
Podobne podstrony:
24 luty 07 (108) Uwaga. Ponieważ całkowite przełożenie może być dodatnie lub ujemne w równaniu na Mz
24 luty 07 (117) stąd lub ogólnie co(A(p) = co(0) + Atp ■ f(0, to(0)) U>i+1
24 luty 07 (11) Uogólnionym przesunięciem przygotowanym <% w ruchu postępowym lub 8ęj w ruchu obr
24 luty 07 (121) lub gdzie: a>max vmax U) min< v min aśr< vśr $ _ vmax vmin Vśr prędk
24 luty 07 (133) Do obliczeń można wykorzystać programy matematyczne np. program MATLAB lub arkusz k
24 luty 07 (74) Każdy układ rzeczywisty składa się z obiektu i otoczenia. Układ rzeczywisty może być
24 luty 07 (84) Natomiast, jeśli otrzymamy Pzr(0 lub Mzr(0, to oznacza, że siła zredukowana jest sił
24 luty 07 (95) Uwaga. Równania (3.118) lub (3.119) nazywamy równaniami ruchu członu redukcji w post
23 luty 07 (49) 1 B człon w ruchu płaskim W celu wyznaczenia chwilowego środka obrotu członu 2 rysuj
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
24 luty 07 (103) Po czasie t2 = 3T prędkość kątowa osiąga 95% wartości ustalonej coust w drugim etap
24 luty 07 (104) Prędkość kątową a>p w ruchu ustalonym podczas przecinania znajdziemy z zależnośc
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
24 luty 07 (109) Etap 6 Całkowanie dynamicznego równania ruchu a-j -bu>i = J2 dco1 ~df (P3.219) (
więcej podobnych podstron