24 luty 07 (57)
Ścisłe spełnienie warunków wyrównoważenia dynamicznego wirnika na etapie konstruowania jest praktycznie nieosiągalne ze względu na nieuniknione błędy wykonania, montażu oraz wady materiałowe. Nowy wirnik może być zatem wyrówno-ważony konstrukcyjnie, ale posiada niewyrównoważenie początkowe i konieczne jest przeprowadzenie dodatkowego wyrównoważenia technologicznego na wyważarce. Nawet po wyważeniu technologicznym pozostaje zawsze tzw. niewyważe-nie resztkowe.
Przedstawiona teoria znajduje zastosowanie przy wyrównoważaniu wirników silników elektrycznych, wentylatorów, dmuchaw, turbin itp. Charakterystycznym przykładem jest dynamiczne wyrównoważanie kół pojazdów samochodowych.
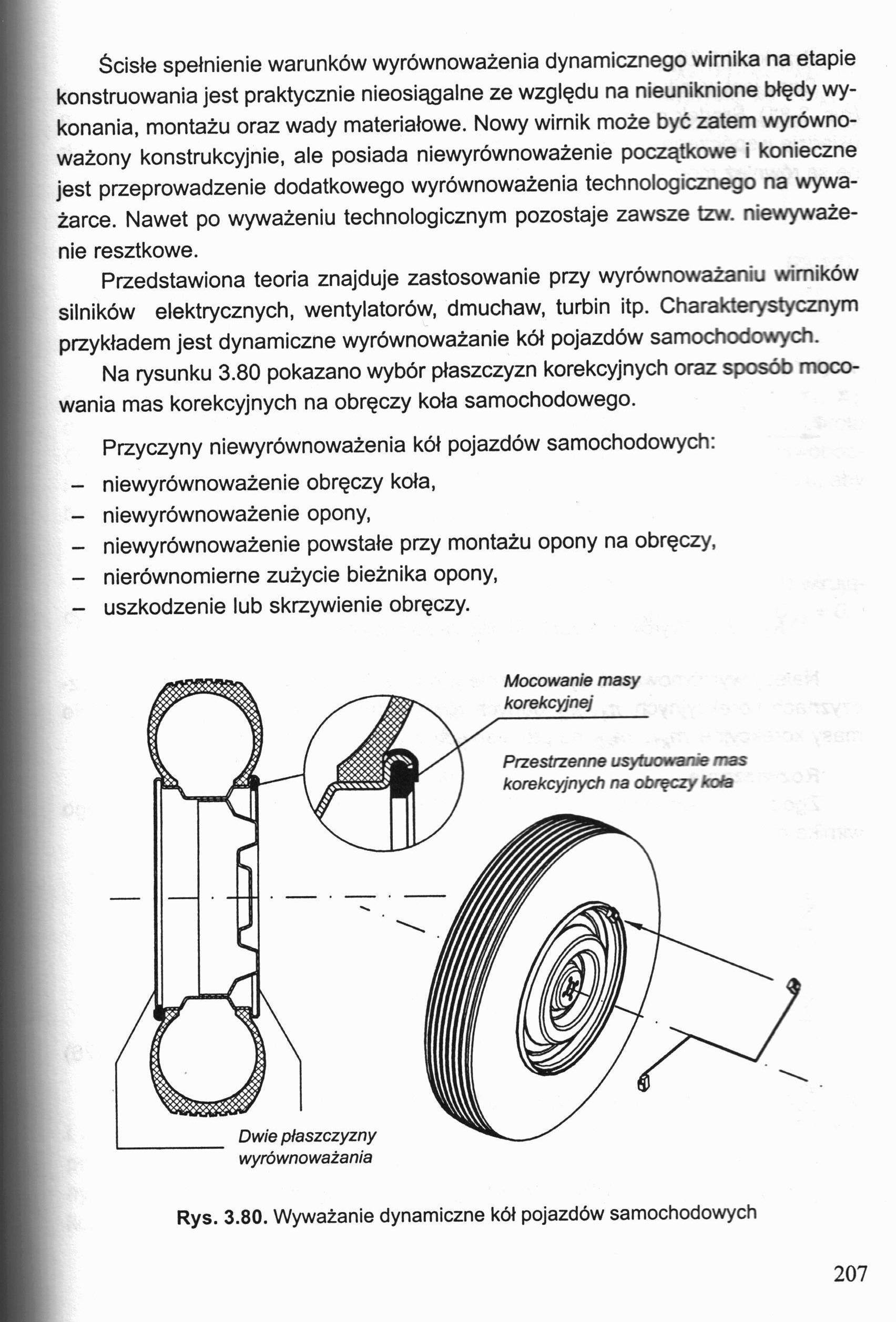
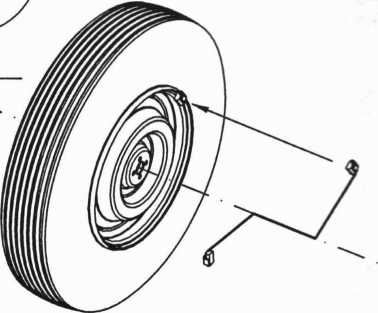
Na rysunku 3.80 pokazano wybór płaszczyzn korekcyjnych oraz sposób mocowania mas korekcyjnych na obręczy koła samochodowego.
Przyczyny niewyrównoważenia kół pojazdów samochodowych:
- niewyrównoważenie obręczy koła,
- niewyrównoważenie opony,
- niewyrównoważenie powstałe przy montażu opony na obręczy,
- nierównomierne zużycie bieżnika opony,
- uszkodzenie lub skrzywienie obręczy.
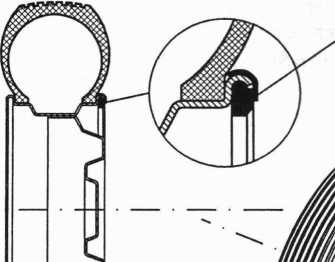
Mocowanie masy korekcyjnej
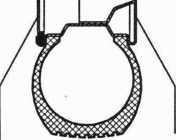
Dwie płaszczyzny wyrównoważania
Przestrzenne usytuowanie mas korekcyjnych na obręczy kota
Rys. 3.80. Wyważanie dynamiczne kół pojazdów samochodowych
207
Wyszukiwarka
Podobne podstrony:
24 luty 07 (53) Jeśli spełnione są równocześnie warunki (3.69) / (3.70), wówczas oś obrotu jest głów
24 luty 07 (131) Analiza wzoru (P3.275) wykazuje, że na wartość momentu bezwładności koła zamachoweg
24 luty 07 (34) Moc sił tarcia w mechanizmach zależy od wielu parametrów konstrukcyjnych, kinematycz
24 luty 07 (54) Rys. 3.74. Model fizyczny niewyrównoważonego wirnika w postaci cienkich niewyrównowa
24 luty 07 (119) Można w ten sposób badać rozruch układu napędowego przyjmując zerowe warunki począt
24 luty 07 (141) Rozwiązując równanie (P3.287) dla zadanych warunków początkowych, mamy: -
24 luty 07 (17) 3.4.2. Modele tarciaw parach kinematycznych postępowych klasy 5 W warunkach tarcia ś
24 luty 07 (20) Rys. 3.48. Analiza wykreślna warunku równowagi granicznej członu podpartego na podpo
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
24 luty 07 (28) Rysunek 3.57 przedstawia wieloboki sił wykonane w trakcie analizy mechanizmu bez uwz
24 luty 07 (56) Założymy, że wał wirnika jest konstrukcyjnie i technologicznie wyrównoważo-ny. Stan
24 luty 07 (60) Należy wyznaczyć masy korekcyjne mk1, mk2 oraz ich położenie cpk1, ęk2 tak, aby wyró
24 luty 07 (64) 3.6.4. Wyrównoważanie statyczne płaskich mechanizmów dźwigniowych W wielu przypadkac
24 luty 07 (69) Warunki równoważności członu o masie rozłożonej w sposób ciągły i zbioru mas skupion
24 luty 07 (72) Przykład 3.24 Rozmieścić przeciwciężary celem wyrównoważenia całkowitego i częściowe
23 luty 07 (57) Następnie piszemy równanie prędkości punktu C, traktując ruch łącznika 2 jako ruch z
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
więcej podobnych podstron