DSCN0524 (Large)
406 13. SILNIKI PRAŁ)U STAŁEGO
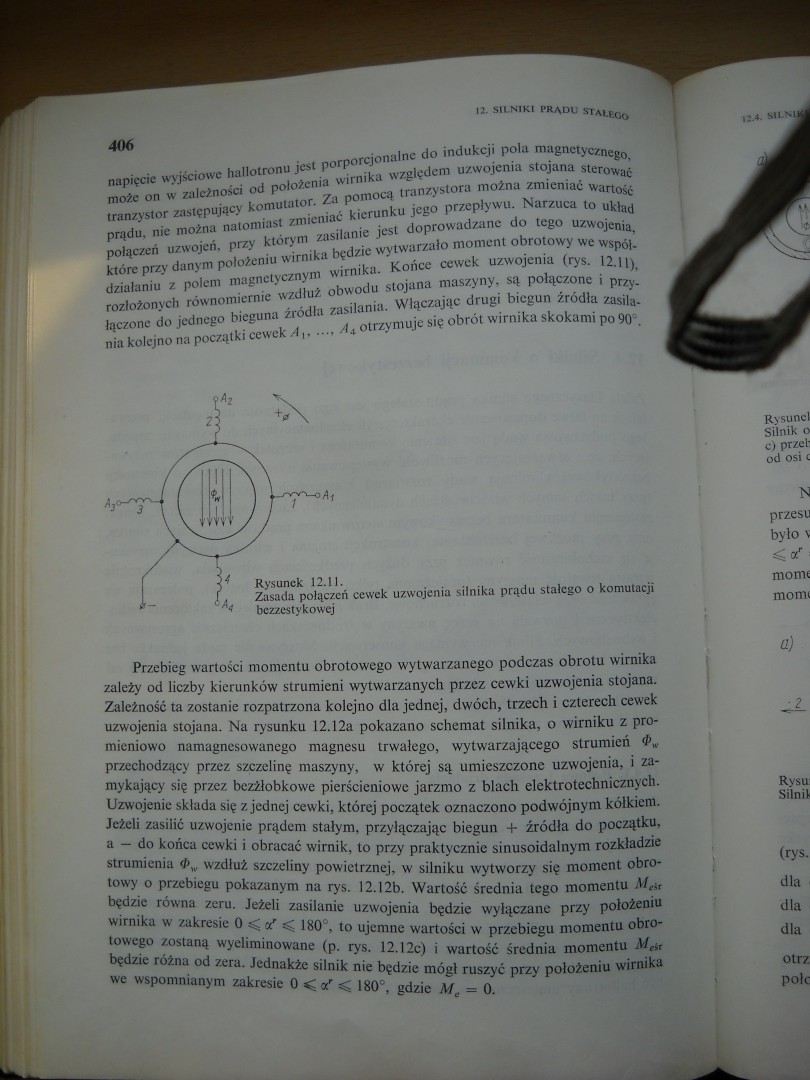
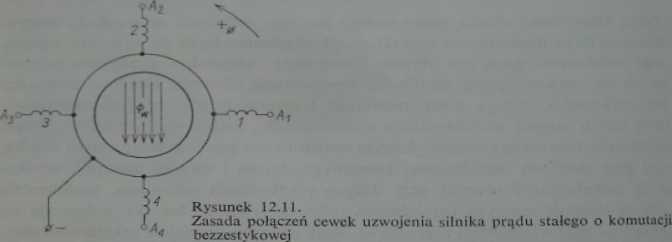
napięcie wyjściowe hallotronu jest porporcjonalne do indukcji pola magnetycznego, może on w zależności od położenia wirnika względem uzwojenia stojana sterować tranzystor zastępujący komutator. Za pomocą tranzystora można zmieniać wartość prądu, nie można natomiast zmieniać kierunku jego przepływu. Narzuca to układ połączeń uzwojeń, przy którym zasilanie jest doprowadzane do tego uzwojenia, które przy danym położeniu wirnika będzie wytwarzało moment obrotowy we współdziałaniu z polem magnetycznym wirnika. Końce cewek uzwojenia (rys. 12.11), rozłożonych równomiernie wzdłuż obwodu stojana maszyny, są połączone i przyłączone do jednego bieguna źródła zasilania. Włączając drugi biegun źródła zasilania kolejno na początki cewek A.... Aa otrzymuje się obrót wirnika skokami po 90°.
Przebieg wartości momentu obrotowego wytwarzanego podczas obrotu wirnika zależy od liczby kierunków strumieni wytwarzanych przez cewki uzwojenia stojana. Zależność ta zostanie rozpatrzona kolejno dla jednej, dwóch, trzech i czterech cewek uzwojenia stojana. Na rysunku 12.12a pokazano schemat silnika, o wirniku z promieniowo namagnesowanego magnesu trwałego, wytwarzającego strumień tf>w przechodzący przez szczelinę maszyny, w której są umieszczone uzwojenia, i zamykający się przez bczżłobkowe pierścieniowe jarzmo z blach elektrotechnicznych. Uzwojenie składa się z jednej cewki, której początek oznaczono podwójnym kółkiem. Jeżeli zasilić uzwojenie prądem stałym, przyłączając biegun + źródła do początku, a — do końca cewki i obracać wirnik, to przy praktycznie sinusoidalnym rozkładzie strumienia <PW wzdłuż szczeliny powietrznej, w silniku wytworzy się moment obrotowy o przebiegu pokazanym na rys. 12.12b. Wartość średnia tego momentu będzie równa zeru. Jeżeli zasilanie uzwojenia będzie wyłączane przy położeniu wirnika w zakresie 0 ^ cer < 180°, to ujemne wartości w przebiegu momentu obrotowego zostaną wyeliminowane (p. rys. 12.12c) i wartość średnia momentu MHt będzie różna od zera. Jednakże silnik nie będzie mógł ruszyć przy położeniu wirnika we wspomnianym zakresie 0 < ar < 180°, gdzie Me = 0.
Wyszukiwarka
Podobne podstrony:
DSCN0526 (Large) 408 12. SILNIKI PRA»U STAŁEGO czego rozruch silnika jest zapewniony przy dowolnym p
DSCN0504 (Large) 9,7. MODEL MATEMATYCZNY SILNIKA 327 zaniedbuje się najczęściej opóźnienia typu elek
DSCN0506 (Large) 9.7. MODEL MATEMATYCZNY SILNIKA 329 Układ równań (9.42) można wykorzystać do dalsze
DSCN0525 (Large) 407 12.4. SILNIKI O KOMUTACJI BEZ7ESTYKOWEJ f Wda? ZJI or*a Rysunek 12.12. Silnik o
5 (1161) napięcie wyjściowe powinno być zbliżone do 6,5 V. Przy odstrcjeniu generatora w górę l
277 (13) 15. RADAR W NAWIGACJI Urządzenie radarowe wykorzystywane jest w nawigacji do wykrywania obi
7.4. FALOWNIKI NAPIĘCIA O PROSTOKĄTNEJ FALI NAPIĘCIA WYJŚCIOWEGO 325 = ^ I u cos kd dO K -nl2 2 — f
zasilanie 230 V AC, napięcie wyjściowe regulowane od 1,25 do 30 V, prąd obciążenia <1 A, tem
<13>> Techniki algorytmiczne - przybliżone i dokładnePoszukiwanie wyjścia z labiryntu Jest
PAKIET 13 - WOKÓŁ NARODOWYCH STEREOTYPÓW TEMAT: Czy kultura jest nam do czegoś potrzebna? Etap eduka
skanowanie0053 (2) napięcie wyjściowe równe jest 0 V, a napięcie wejściowe poniżej (20*30)% wartości
2tom306 8. ENERGOELEKTRONIKA 614 typowe przebiegi wyjściowe przy obciążaniu typu RL. Napięcie wyjści
DSCN0513 (Large) SILNIKI WYKONAWCZB PRĄDU STAŁEGO 271 cUl 31b) - / 2
DSCN0515 (Large) U, SILNIKI WYKONAWCZE PRĄDU STAŁEGO 273 ponadto pełna moc sterowania jest potrzebna
DSCN0516 (Large) 274 8. SILNIKI WYKONAWCZE 833.1. Sterowanie od strony tworaika Równania napięć i mo
DSCN0519 (Large) SILNIKI WYKONAWCZE PKĄDU STAŁEGO 277 Moc sterowania wyraża się zależnością SILNIKI
DSCN0522 (Large) gj. SILNIKI WYKONAWCZE PRĄDU STAŁEGO 289 Rysunek 8.79. Ideowy schemat połączeń siln
więcej podobnych podstron