HPIM0761
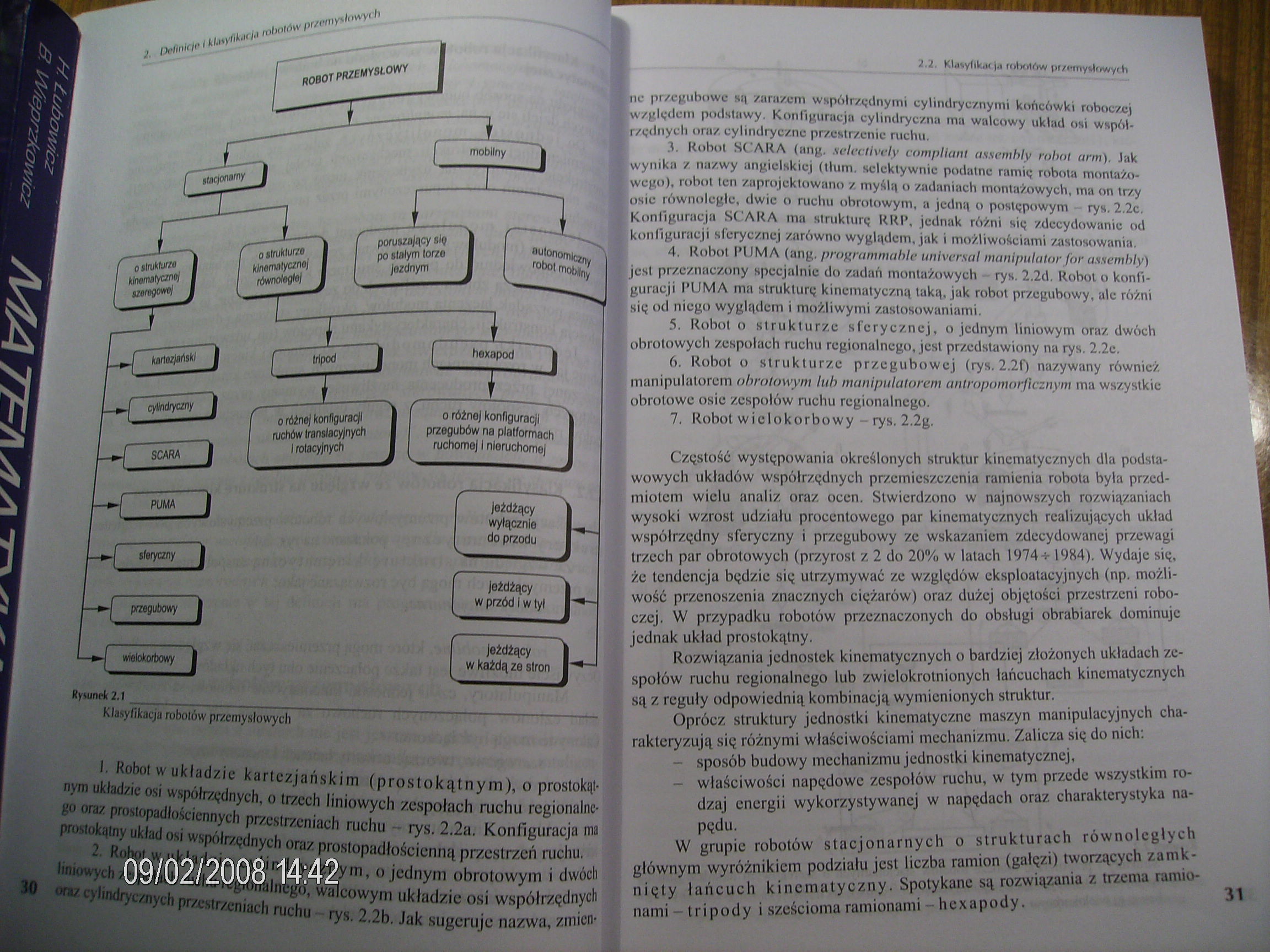
ROBOT PRZEMYSŁOWY
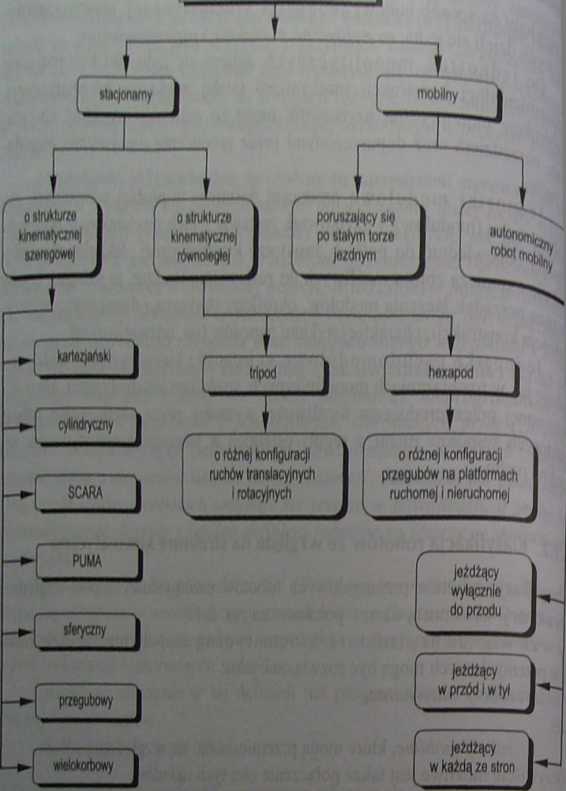
Rywjnek 2,1_____
Klasyfikacja robotów przemysłowych
1. Robot w układzie kartczjańskim (prostokątnym), o prostokątnym układzie osi współrzędnych, o trzech liniowych zespołach ruchu regionalnego oraz prostopadłościennych przestrzeniach ruchu | tys. 2.2a. Konfiguracja ma prostokątny układ osi współrzędnych oraz prostopadłościcnną przestrzeń ruchu.
o jednym obrotowym i dwóch układzie osi współrzędnych oriz cylindrycznych przestrzeniach ruchu - rys. 2.2b. Jak sugeruje nazwa, zmien-
| iic przegubowe sh zarazem współrzędnymi cylindrycznymi końcówki roboczej ■względem podMtawy. Konfiguracja cylindryczna ma walcowy układ oii w*pół-Br/ędnych oraz cylindryczne przestrzenie ruchu.
3. Robol SC ARA (ang. .ielectlvely compllant assemhly robot arni), Jak ■wynika z nazwy angielskiej (tłum. selektywnie podatne ramię robota montażo-■wego), robot ten zaprojektowano z mydlą o zadaniach montażowych, ma on trzy ■osie równoległe, dwie o ruchu obrotowym, a jedną o postępowym --- rys. 2.2c. ■Konfiguracja SCAKA ma strukturę RRP, jednak różni się zdecydowanie od ■konfiguracji sferycznej zarówno wyglądem, jak i możliwościami zastosowania.
4. Robot PUMA (ang. programmahle universal manipulator for awembly) ■jest przeznaczony specjalnie do zadań montażowych - rys. 2.2d. Robot o konfi-■guracji PUMA ma strukturę kinematyczną taką, jak robot przegubowy, ale różni ■się od niego wyglądem i możliwymi zastosowaniami.
5. Robot o strukturze sferycznej, o jednym liniowym oraz dwóch
■ obrotowych zespołach ruchu regionalnego, jest przedstawiony na rys. 2.2c.
6. Robot o strukturze przegubowej (rys. 2.20 nazywany również
■ manipulatorem obrotowym lub manipulatorem anlropomorjlcznym ma wszystkie
■ obrotowe osie zespołów ruchu regionalnego.
7. Robot wielokorbowy - rys. 2.2g.
Częstość występowania określonych struktur kinematycznych dla podsta-I wowych układów współrzędnych przemieszczenia ramienia robota była przed-
■ miotem wielu analiz oraz ocen. Stwierdzono w najnowszych rozwiązaniach B wysoki wzrost udziału procentowego par kinematycznych realizujących układ
■ współrzędny sferyczny i przegubowy ze wskazaniem zdecydowanej przewagi
■ trzech par obrotowych (przyrost z 2 do 20% w latach 1974+1984). Wydaje się, B że tendencja będzie się utrzymywać ze względów eksploatacyjnych (np. moźli-I wość przenoszenia znacznych ciężarów) oraz dużej objętości przestrzeni robo-1 czej. W przypadku robotów przeznaczonych do obsługi obrabiarek dominuje I jednak układ prostokątny.
Rozwiązania jednostek kinematycznych o bardziej złożonych układach zespołów ruchu regionalnego lub zwielokrotnionych łańcuchach kinematycznych są z reguły odpowiednią kombinacją wymienionych struktur.
Oprócz struktury jednostki kinematyczne maszyn manipulacyjnych charakteryzują się różnymi właściwościami mechanizmu. Zalicza się do nich:
- sposób budowy mechanizmu jednostki kinematycznej,
- właściwości napędowe zespołów ruchu, w tym przede wszystkim rodzaj energii wykorzystywanej w napędach oraz charakterystyka napędu.
W grupie robotów stacjonarnych o strukturach równoległych głównym wyróżnikiem podziału jest liczba ramion (gałęzi) tworzących zamknięty łańcuch kinematyczny. Spotykane są rozwiązania z trzema ramionami - tri pod y i sześcioma ramionami -hexapody.
31
Wyszukiwarka
Podobne podstrony:
HPIM0759 <k> l^ca Ic zr*Qf,Definicje i klasyfikacja robotów przemysłowych L2.1. Definicje pods
HPIM0760 2. Definicje i klasyfikacja robotów przemysłowych Według Moreckicgo [62] „robot to urządzen
HPIM0762 MATEMATYKA 2.2. Klasyfikacja robotów przemysłowych Ze względu na rozwiązania kinematyczne r
HPIM0764 2. Definicje i klasyfikacja robotów przemysłowych 2. Definicje i klasyfikacja robotów
Definicje i klasyfikacja robotów przemysłowych 1. Definicje podstawowe Do dalszych rozważań pizyjęto
P1080191 (2) 2Definicje i klasyfikacja robotów przemysłowych2.1. Definicje podstawowe Do dalszych ro
P1080192 (2) 2. Definicje i klasyfikacja robolów przemysłowych 2.2.1. Klasyfikacja robotów ze względ
P1080193 2. Definicje i klasyfikacja robotów przemysłowych względem podstawy. Konfiguracja cylindryc
P1080196 2. Definicje i klasyfikacja robotów przemysłowych Rysunek 2^_______ Klasyfikacja robotów ze
Image 16 21 1.5. Klasyfikacja robotów przemysłowych Ze względu na wielość kryteriów klasyfikacja rob
więcej podobnych podstron