9142890863
System sterowania głównego robota wyposażony jest w kilka współpracujących ze sobą programów, w skład których wchodzi m.in. moduł wirtualnej rzeczywistości, sterownik admitancyjny, jak również system biologicznego sprzężenia zwrotnego wykorzystujący informację wyekstrahowane z sygnałów elektromiograficznych. Dzięki temu biologicznemu sprzężeniu zwrotnemu, możliwe jest sterowanie przez pacjenta robotem, mimo iż samodzielnie jest on w stanie jedynie lekko naprężyć swoje mięśnie.
MySQL

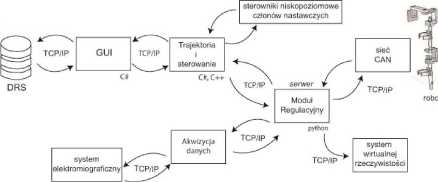
Rysunek 6 Schemat oprogramowania wysokopoziomowego robota
Najczęściej roboty są sterowane w sposób pozycyjny. Jest to sterowanie, które odbywa się przy dużej sztywności manipulatora. Tego typu sterowanie powoduje, że robot jest odporny na zakłócenia zewnętrzne, ale jednocześnie w przypadku wystąpienia dużych udarów prowadzi to często do uszkodzenia układu napędowego robota. W przypadku robotów rehabilitacyjnych negatywną stroną tego podejścia jest to, że pacjent odczuwa kontakt z robotem, jako z bardzo sztywnym mechanizmem, co nie jest przyjemnym uczuciem.
Impedancję łańcucha kinematycznego można zmieniać przez odpowiednie sterowanie zespołów napędowych robota. Stosunkowo łatwo jest na nią wpływać w przypadku aktuatorów pneumatycznych lub hydraulicznych. Ich sztywność jest bowiem naturalnie związana z właściwościami ośrodków przenoszących energię. W przypadku napędów elektrycznych należy zastosować sterowanie usztywniające lub zmiękczające łańcuch kinematyczny przez zastosowanie sprzężenia zwrotnego. W tym procesie trzeba przewidywać przyszłą interakcję manipulatora z otoczeniem, bowiem zmiany impedancji nie da się dokonać nieskończenie szybko. Wynika to z faktu, że aktuatory elektryczne są sztywne z samej natury (najczęściej wysoka prędkość obrotowa oraz wysokie przełożenie przekładni). Powoduje to, iż interakcja z otoczeniem musi być wykryta odpowiednio wcześniej, aby kontroler mógł na nią skutecznie zareagować. Można to osiągnąć dzięki zastosowaniu informacji na temat otoczenia, uzyskiwanych z czujników zewnętrznych robota. W przypadku rozważanego robota posłużono się jednak nieco odmiennym rozwiązaniem polegającym na estymacji siły na podstawie prądu płynącego przez silnik BLDC. Praktyczna implementacja
7
Wyszukiwarka
Podobne podstrony:
sieciB SYSTEM Każdemu urządzeniu technicznemu lub każdemu zespołowi współpracujących ze sobą urządze
Czym jest system informacyjny?Zbiór współpracujących ze sobą modułów, które zbierają (pozyskują),
DSCN9721 Układ sterowania (system sterowania, sterownik) robota - pewna całość złożona z powiązanych
system wskazówek praktycznego postępowania. Wskazania te muszą być ze sobą przynajmniej niesprzeczne
BHP 1h (40) konieczne do opracowania systemów produkcji, magazynowania oraz sprzedaży jest informacj
System: Zbiór części / elementów powiązanych ze sobą i współpracujących ze sobą. Systemem nazywać
DSC00823 L. von BERTALANF F> - SYSTEM TO ZBIÓR t Mt NtOW W/AII MNII POWIĄZANYCH ZE SOBĄ I OTOCJI
Slajd2 (8) Baza danych - definicja Baza danych jest kolekcją związanych ze sobą danych. System zarzą
skanuj0012 176 Rozdział jedenasty Wokół Tańca Śmierci grupuje się kilka spokrewnionych ze sobą wyobr
więcej podobnych podstron