1313878653
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów
Według kryterium sposobu uchwycenia obiektu manipulacji chwytaki można podzielić na:
a) siłowe: naprężeniowe , adhezyjne,
b) kształtowe,
c) siłowo - kształtowe.
Chwytaki siłowe naprężeniowe wykorzystują wytworzoną za pośrednictwem szczęk siłę tarcia, siłowe adhezyjne wykorzystują podciśnienie lub pole elektromagnetyczne,
Chwytaki kształtowe obejmują przedmiot szczękami odpowiednio dobranym kształcie nie powodując nacisku ,
Chwytaki siłowo - kształtowe wykorzystują zarówno siłę tarcia wywołaną naciskiem szczęk jak i odpowiednie dopasowanie kształtu szczęk.
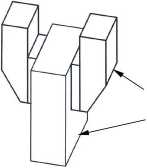
Szczęka
Przedmiot
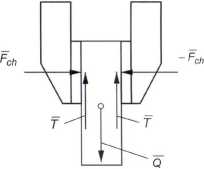
Rys. 2. Zasada działania chwytaka siłowego naprężeniowego

pa- ciśnienie atmosferyczne, pp- podciśnienie, kp=0,85 - współczynnik uwzględniający nierównomierność przylegania i zmiany ciśnienia
Rys. 3. Zasada działania chwytaka siłowego podciśnieniowego
Opracował: J. Felis str. 2
Wyszukiwarka
Podobne podstrony:
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów Temat: CHWYTAKI MANIPUL
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów W zależności od przyjęt
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów Układy przeniesienia na
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów KONSTRUOWANIE CHWYTAKA
więcej podobnych podstron