Politechnika Poznańska
Wydział Budowy Maszyn i Zarządzania
Podstawy Automatyki – laboratorium
Ćw. 4:
Badanie własności liniowych nieelektrycznych członów różniczkujących
Cel ćwiczenia:
Celem ćwiczenia jest uzyskanie wykresów charakterystyk skokowych członów różniczkujących –
mechanicznych i hydraulicznych – oraz wyznaczenie w sposób teoretyczny i graficzny ich stałych
czasowych.
Zakres niezbędnych wiadomości teoretycznych:
Obejmuje on:
a) klasyfikację liniowych członów automatyki,
b) równania różniczkowe, równania charakterystyk statycznych i odpowiedzi na wymuszenie
skokowe podstawowych członów liniowych automatyki,
c) transmitancje, stałe czasowe, interpretacje graficzne,
d) przykłady realizacji liniowych członów automatyki.
Opis stanowiska lab:
a)
Mechaniczny Człon Różniczkujący
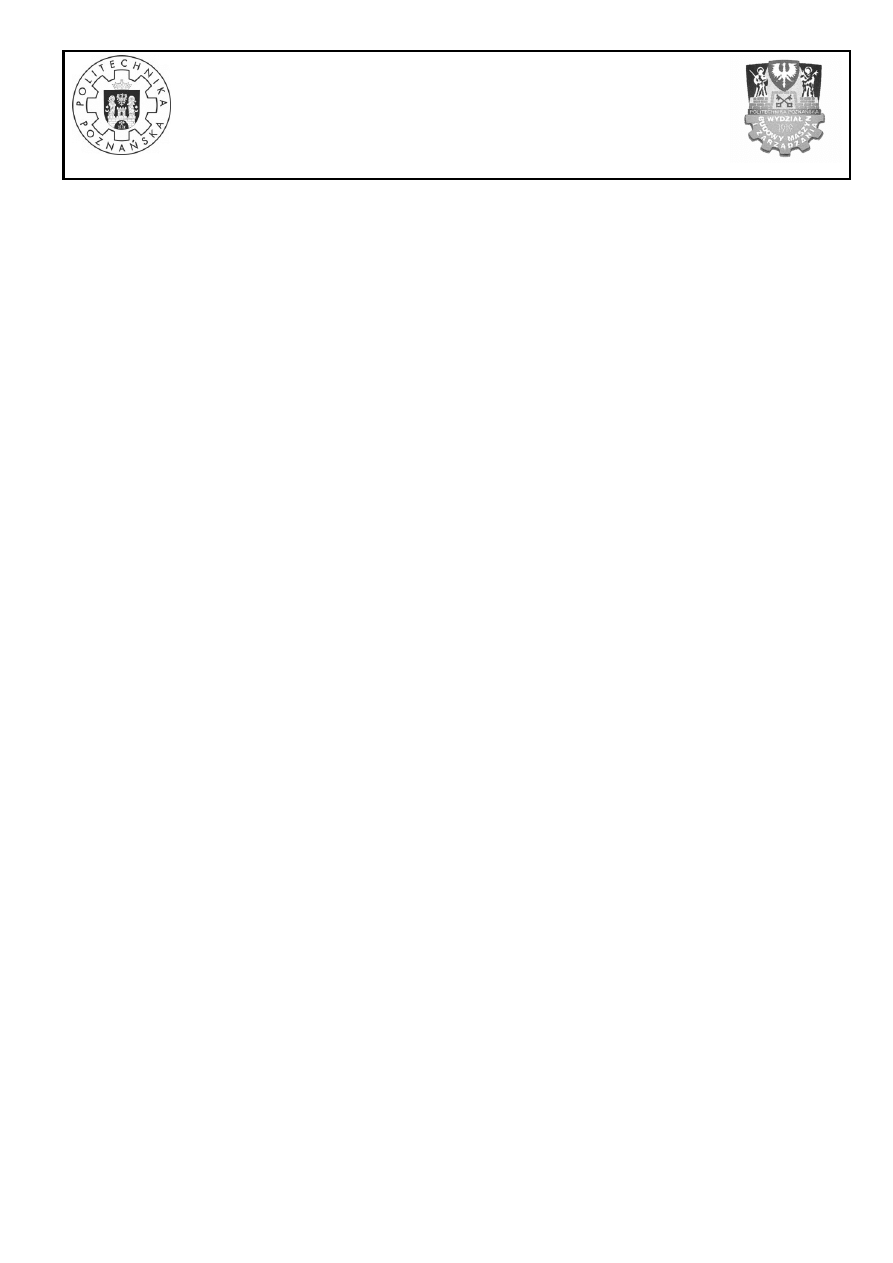
Schematyczną budowę mechanicznego członu różniczkującego przedstawia rysunek 4.1 Wielkością
wejściową jest przesunięcie x śruby (1). Wielkością wyjściową jest odległość y środka gumowej rolki
(3), nałożonej na nakrętkę (2), od osi obrotu tarczy (4). Tarcza (4) obraca się ze stałą prędkością
kątową
ω
1 wymuszoną przez silnik elektryczny. Przesuwając śrubę (1) o x, przesuwamy również
nakrętkę (2) z rolką (3) z neutralnego położenia środkowego, co wymusza obrót rolki, a więc
nakręcanie się nakrętki na śrubę. Wymuszony jest zatem ruch wzdłużny y rolki w kierunku osi tarczy,
który ustanie, gdy rolka znajdzie się w położeniu centralnym. Ruch ten jest zmienny w czasie. Jego
wielkość rejestrowana jest za pomocą czujnika indukcyjnego, wzmacniacza i rejestratora X–Y. Stan
ustalony y = 0 nastąpi przy położeniu centralnym rolki dla każdej wartości wymuszenia x (wówczas
ω
2 = 0). Charakterystyka statyczna jest zatem identyczna z charakterystyką statyczną członu
różniczkującego. W stanach nieustalonych bezwzględną prędkość nakrętki wyznaczymy jako sumę
prędkości nakrętki względem śruby
r
v
w
i prędkości unoszenia
r
v
u
czyli:
v
v
v
w
u
=
+
Politechnika Poznańska
Wydział Budowy Maszyn i Zarządzania
Podstawy Automatyki – laboratorium
Ćw. 4:
Badanie własności liniowych nieelektrycznych członów różniczkujących
Rys. 4.1. Mechaniczny liniowy człon różniczkujący: zdjęcie i schemat
1 – śruba, 2 – nakrętka, 3 – rolka, 4 – tarcza obrotowa
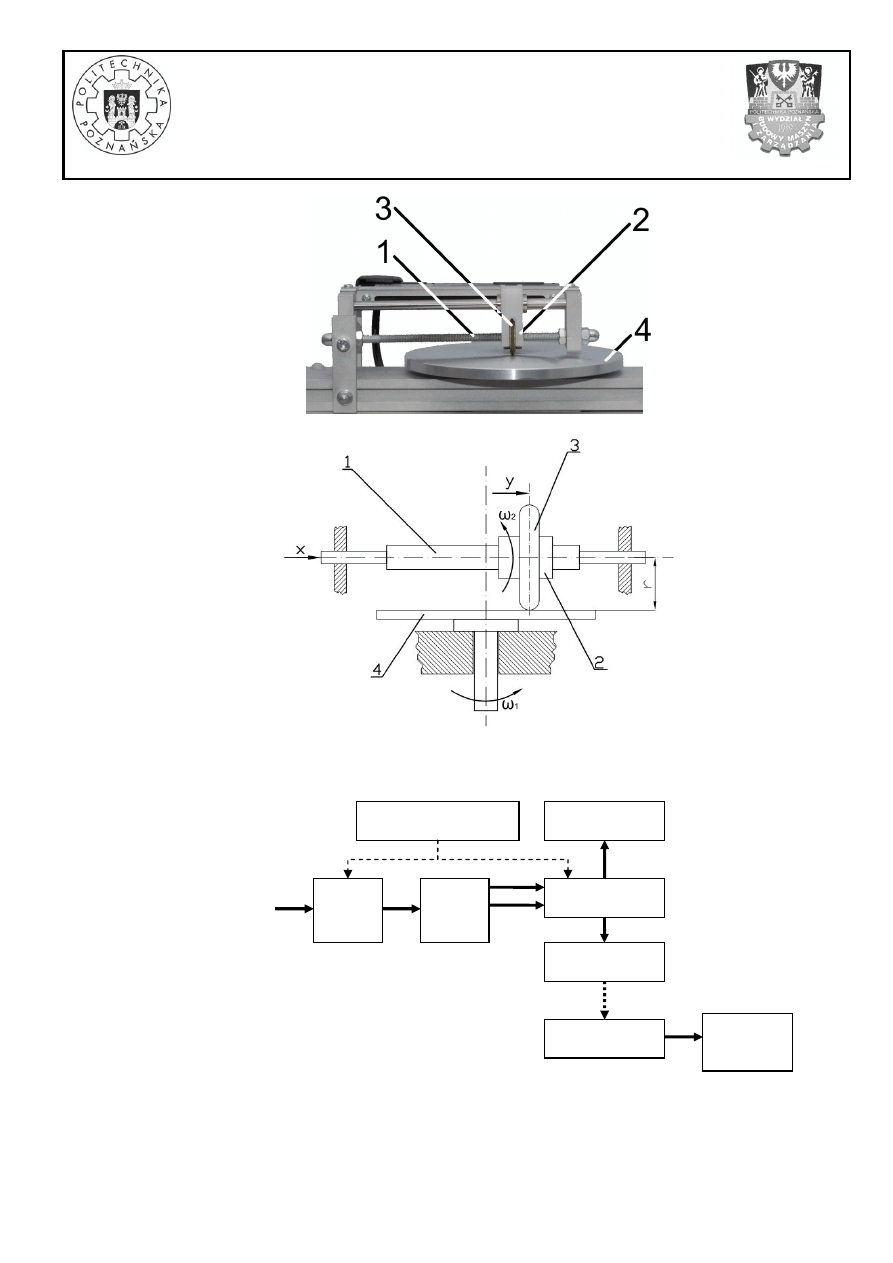
Rys. 4.2. Schemat blokowy stanowiska laboratoryjnego
EB – element badany, Cz.R – czujnik przemieszczenia rezystancyjny
EB
Cz.R
10kΩ
oscyloskop
Karta SD
PC
ekran
Wykres
y(t)
~230V
x
y
U(t)
GND
Politechnika Poznańska
Wydział Budowy Maszyn i Zarządzania
Podstawy Automatyki – laboratorium
Ćw. 4:
Badanie własności liniowych nieelektrycznych członów różniczkujących
Ponieważ:
v
h
w
= −
ω
π
2
2
(gdzie h jest skokiem gwintu śruby (1)) i ponieważ
ω
ω
1
2
y
r
=
(gdzie pominięto poślizg rolki względem
tarczy, a r jest promieniem rolki gumowej), to
v
h
y
w
= −
⋅
ω
π
1
2
r
.
Równanie prędkości można więc zapisać w postaci następującej:
dy
dt
h
r
y
dx
dt
= −
⋅
+
ω
π
1
2
.
Po oznaczeniu stałej czasowej
T
r
h
=
2
1
π
ω
otrzymamy:
T
dy
dt
y
T
dx
dt
+ =
,
a więc równanie rzeczywistego członu różniczkującego.
Politechnika Poznańska
Wydział Budowy Maszyn i Zarządzania
Podstawy Automatyki – laboratorium
Ćw. 4:
Badanie własności liniowych nieelektrycznych członów różniczkujących
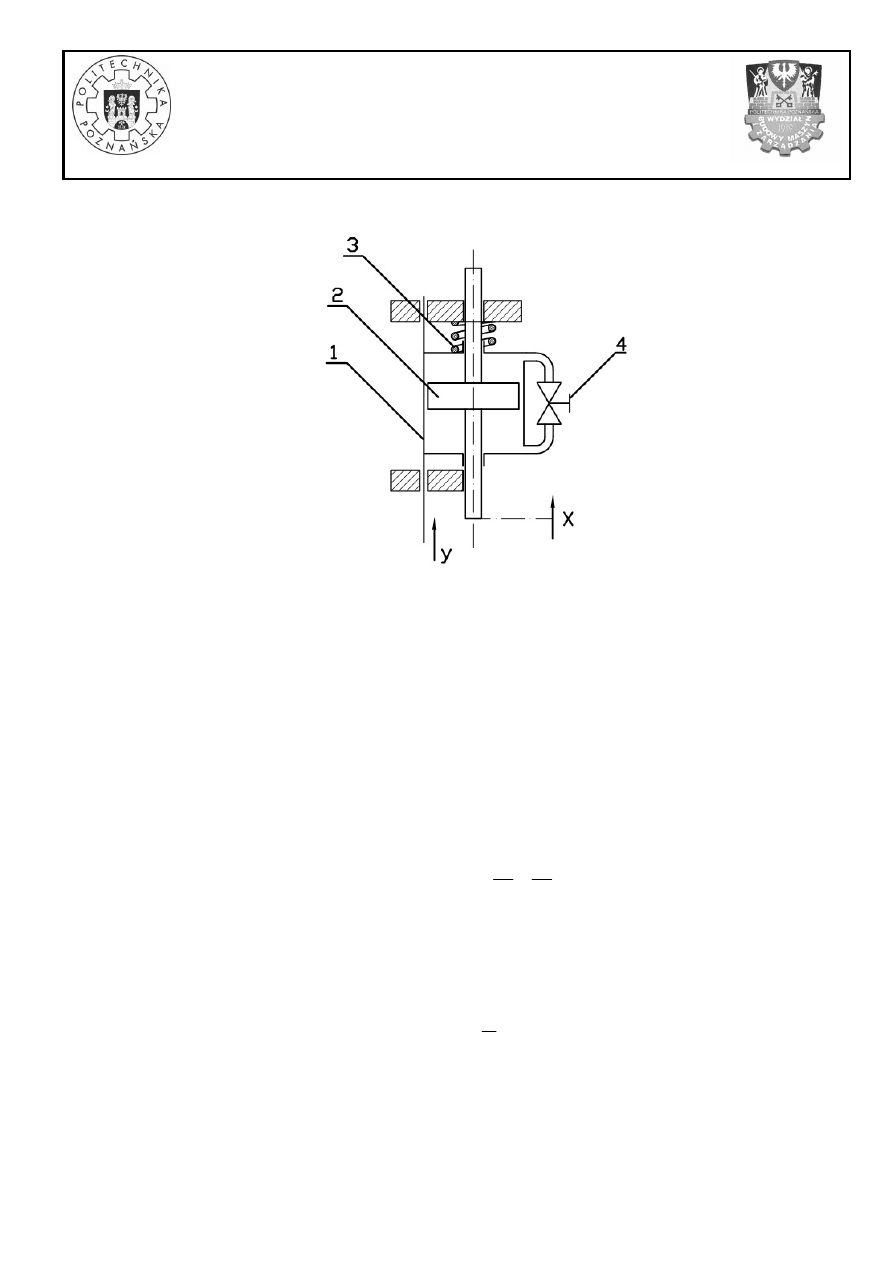
b) Hydrauliczny Człon Różniczkujący
Rys. 4.3. Hydrauliczny liniowy człon różniczkujący
Hydrauliczny człon różniczkujący przedstawia rysunek 4.3. Sygnałem wejściowym jest
przesunięcie x tłoczka (2). Sygnałem wyjściowym jest przesunięcie y cylinderka (1) tego układu. W
stanie ustalonym sprężyna (3) nie jest naprężona, nie wywiera żadnej siły na cylinderek (1) i nie
powoduje jego przesuwania względem tłoczka (2). Równanie charakterystyki statycznej ma postać:
y
=
0
dla każdego x nie powodującego oparcia się tłoczka (2) o dno cylinderka (1).
W stanach nieustalonych siła oporu hydraulicznego równoważy siłę ugiętej sprężyny. Ponieważ siła
oporu hydraulicznego jest proporcjonalna do prędkości v tłoczka względem cylinderka,
−
=
=
dt
dy
dt
dx
c
v
c
y
c
t
t
s
,
gdzie
c
s
jest sztywnością sprężyny, a
c
t
stałą proporcjonalną do powierzchni przekroju poprzecznego
tłoczka A i odwrotnie proporcjonalną do przekroju f szczeliny przepływowej nastawianej śrubą (4).
Jest ponadto zależna od lepkości użytego oleju i kształtu szczeliny. Jeżeli stała czasowa
T
c
c
t
s
=
,
to otrzymamy równanie członu różniczkującego (4.22)
Politechnika Poznańska
Wydział Budowy Maszyn i Zarządzania
Podstawy Automatyki – laboratorium
Ćw. 4:
Badanie własności liniowych nieelektrycznych członów różniczkujących
T
dy
dt
y
T
dx
dt
+ =
.
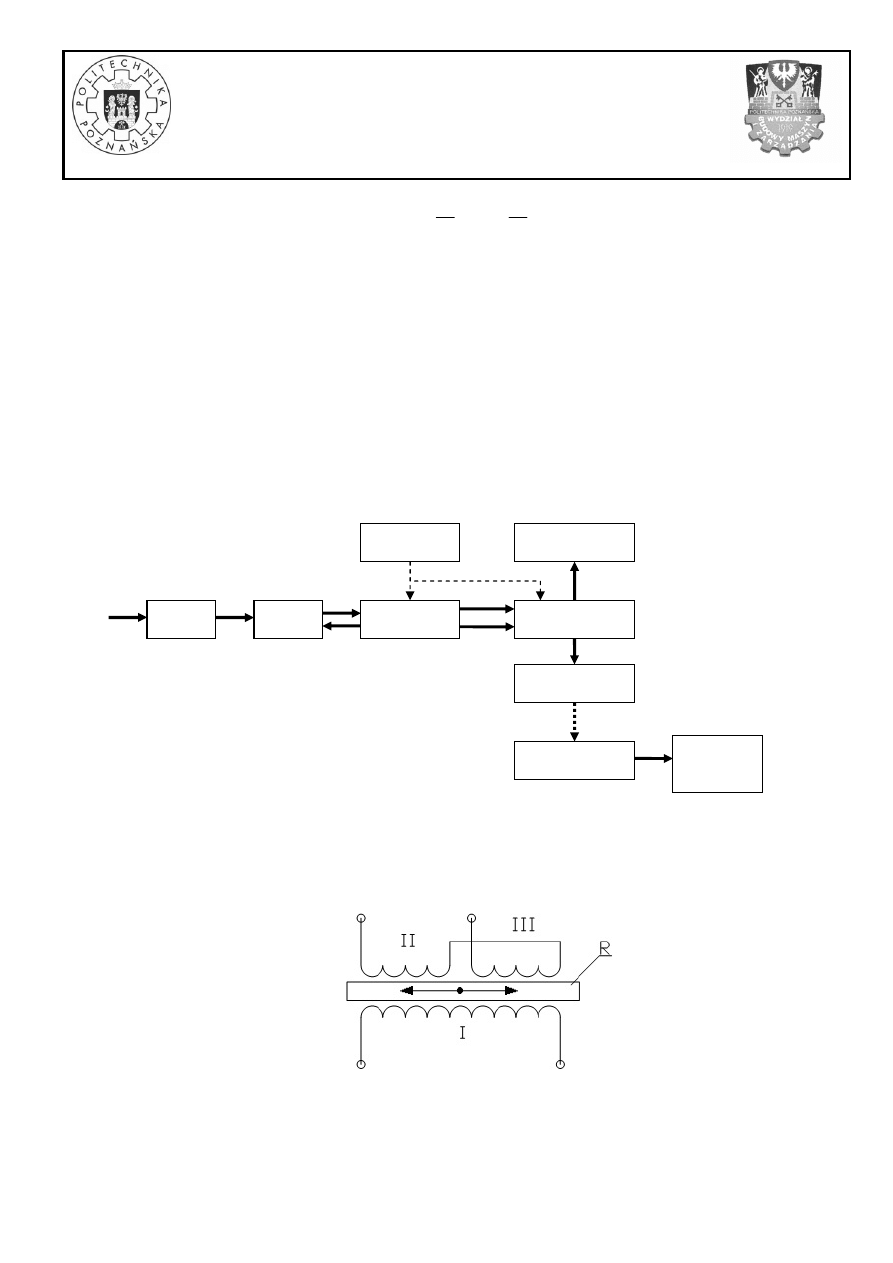
Schemat blokowy stanowiska laboratoryjnego przedstawia rysunek 4.4. Czujnik przemieszczeń
liniowych (rys. 4.5) jest przetwornikiem indukcyjnym. Składa się z uzwojenia pierwotnego (I),
zasilanego z generatora napięciem 5 V o częstotliwości 5 kHz, oraz dwóch jednakowych, połączonych
przeciwsobnie uzwojeń wtórnych (II) i (III). W położeniu spoczynkowym rdzenia R wypadkowa siła
elektromotoryczna na uzwojeniach wtórnych jest równa 0. Jeśli rdzeń zostanie przesunięty, wówczas
na wyjściu czujnika pojawi się siła elektromotoryczna o częstotliwości 5 kHz, proporcjonalna do
wielkości wychylenia rdzenia od położenia neutralnego. Miernik Przemieszczeń Liniowych
MPL-202.
Składa się z generatora napięcia zasilającego czujniki, które jest zmodulowane przebiegiem
mierzonym i podane na wejście wzmacniacza. Wzmocniony sygnał jest przesyłany na fazoczuły
detektor, a następnie do rejestratora i na wyświetlacz. Sygnał wyjściowy dodatkowo wyprowadzony
jest na wyście napięciowe w standardzie 0..5V
Rys. 4.4. Schemat blokowy stanowiska laboratoryjnego
EB – element badany, Cz.P – czujnik przemieszczenia, MPL202 – miernik przemieszczeń liniowych
Rys. 4.5. Schemat czujnika przemieszczeń liniowych
EB
Cz.P
MPL-202
oscyloskop
Karta SD
PC
ekran
Wykres
y(t)
~230V
x
y
U(t)
GND

Politechnika Poznańska
Wydział Budowy Maszyn i Zarządzania
Podstawy Automatyki – laboratorium
Ćw. 4:
Badanie własności liniowych nieelektrycznych członów różniczkujących
Przebieg ćwiczenia:
W ramach ćwiczenia należy:
a) podłączyć oscyloskop według schematu blokowego oraz instrukcji obsługi
b) wyskalować zakres pomiarowy oraz offset oscyloskopu tak aby cały badany sygnał mieścił się w
wyświetlanym oknie
c) zarejestrować przebiegi otrzymane z czujników przemieszczeń dla obydwu członów
różniczkujących; w przypadku członu hydraulicznego wykonać kilka wykresów dla różnych
przekrojów szczeliny przepływowej, a więc dla różnych szybkości zachodzącego procesu;
c) dokonać pomiaru wielkości skoku sygnału wejściowego oraz wyskalować osie otrzymanych
przebiegów; wyznaczyć graficznie ich stałe czasowe;
d) wykonać pomiary potrzebnych parametrów i dokonać obliczeń teoretycznych stałych czasowych.
Sprawozdanie:
W sprawozdaniu należy zamieścić:
– schemat blokowy stanowiska laboratoryjnego,
– wyprowadzenie równań dynamiki badanych członów,
– opisane wykresy odpowiedzi skokowych (otrzymanych w czasie badań),
– wyznaczone stałe czasowe (z wykresów oraz obliczeń),
– wyznaczoną teoretycznie odpowiedź (wykres) na wymuszenie liniowo narastające x(t) = at członu
mechanicznego,
– wnioski dotyczące badanego zagadnienia.
Wyszukiwarka
Podobne podstrony:
Podstawy Automatyki Lab - 2010 - CW6, Badanie regulatora
Podstawy Automatyki Lab 2010 CW6 Badanie regulatora â¦
Podstawy Automatyki Lab 2010 CW1 Układy przełączając…
Podstawy-Automatyki-Lab-2010-CW1-Układy-przełączając…
Podstawy Automatyki Lab 2014 CW3 Badania regulatora dwupołożeniowego
Podstawy Automatyki Lab - 2010 - CW2, Układy kombinacyjne
Podstawy Automatyki Lab 2010 CW2 Układy kombinacyjne
Podstawy Automatyki Lab 2010 CW3 UkÅady sekwencyjne â¦
Podstawy Automatyki Lab 2010 CW5 Regulator dwupołoże
więcej podobnych podstron