Teoria sterowania i technika regulacji, II rok
14.04.2014
KEiASPE
, AGH Kraków
dr inż. Andrzej Firlit
1
Program ćwiczenia laboratoryjnego – O
PIS
UAR
W PRZESTRZENI STANU
Dany jest układ dynamiczny III rzędu, opisany transmitancją operatorową oraz równaniem stanu
wraz z równaniem wyjścia w przestrzeni stanu:
2
3
2
2
8
8 2
18 4
12
s
G s
s
, s
, s
1.
Dokonaj transformacji:
a. z opisu transmitancyjnego układu do opisu w przestrzeni stanu
tf2ss()
oraz
b. z opisu układu w przestrzeni stanu do opisu transmitancyjnego
ss2tf()
.
2.
Wyznacz zera i bieguny układu, wartości własne i wektory własne macierzy stanu A, porównaj
zbiór wartości własnych ze zbiorem biegunów transmitancji G(s) –
ss2zp(), [Mw,Ad]=eig()
.
3.
Wyznacz opis układu w postaci równań algebraiczno-różniczkowych oraz w przestrzeni stanu w
postaci macierzowej
(A, B, C, D)
– forma kanonicza sterowalna (zmiennych fazowych).
u
x
x
x
x
x
x
1
0
0
2
,
8
4
,
18
12
1
0
0
0
1
0
3
2
1
3
2
1
3
2
1
2
0
8
x
x
x
y
)
(
)
(
)
(
t
t
t
u
B
x
A
x
)
(
)
(
)
(
t
t
t
u
D
x
C
y
4.
Narysuj schemat blokowy dla opisu w przestrzeni stanu.
5.
Wyznacz charakterystyki dynamiczne układu sterowania w odpowiedzi na skok jednostkowy
dla zerowych x
0
= [0, 0, 0]
T
i niezerowych warunków początkowych, np. x
0
= [0.5, 0, 1]
T
.
6.
Wyznacz opis układu w przestrzeni stanu w różnych (równoważnych) postaciach:
[Am,Bm,Cm,Dm,Tm]=canon(A,B,C,D,'modal'),
[An,Bn,Cn,Dn,Tn]=canon(A,B,C,D,'companion')
.
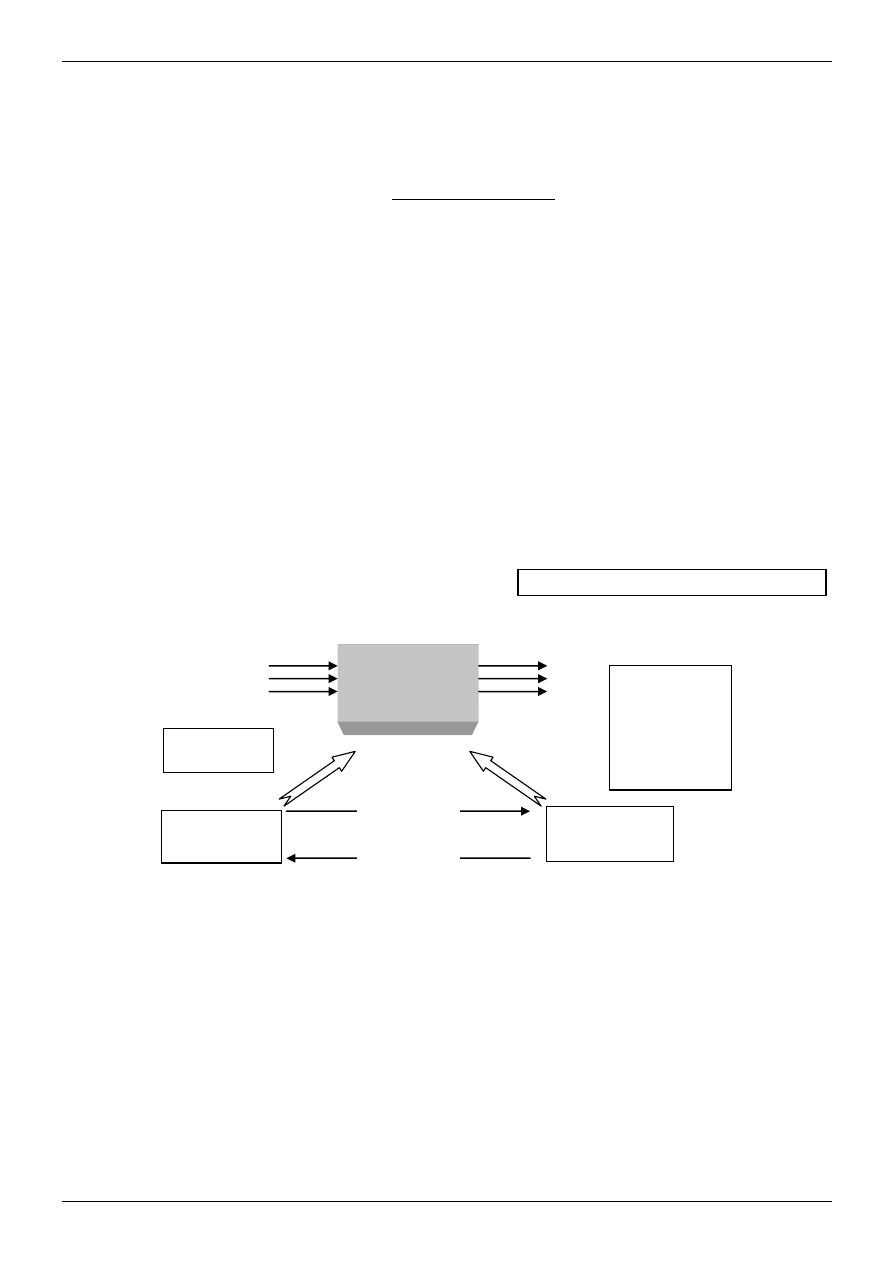
7.
Wyznacz opis układu w nowym układzie współrzędnych po zastosowaniu liniowej transformacji
w postaci:
8.
Zbadaj sterowalność i obserwowalność układu.
Listing m-pliku
echo on,
clc, clear, close all
%-------------------------------------
% transmitancja G(s) - wektory współczynników
numG = [2, 0, 8];
denG = [1, 8.2, 18.4, 12];
sysG = tf(numG,denG) %printsys(numG,denG)
pause
%-------------------------------------
% funkcja tf2ss() => forma sterowalna
[Ac,Bc,Cc,Dc] = tf2ss(numG,denG)
pause
%-------------------------------------
% funkcja ss2tf()
[numGc,denGc] = ss2tf(Ac,Bc,Cc,Dc),
pause
%-------------------------------------
sysGc = tf(numGc,denGc) %printsys(numG,denG)
pause
%-------------------------------------
% ZAOKRĄGLENIE
% numGc=roundaf(numGc); denGc=roundaf(denGc)
% sysGc = tf(numGc,denGc), pause
%-------------------------------------
% model przestrzeni stanu
sysc = ss(Ac,Bc,Cc,Dc), pause
%-------------------------------------
% funkcja eig() - wartości własne macierzy A
eigAc = eig(Ac)
[Mww,Mdiag] = eig(Ac) % Ac*Mww = Mww*Mdiag
pause
%-------------------------------------
% funkcja tf2zp() - zera, bieguny
[z,b,w] = tf2zp(numG,denG)
[zGc,bGc,wGc] = tf2zp(numGc,denGc), pause
%-------------------------------------
% funkcja ss2zp() - zera, bieguny
[zss,bss,wss] = ss2zp(Ac,Bc,Cc,Dc), pause
%-------------------------------------
D
D
P
C
C
B
P
B
P
A
P
A
z
z
1
z
1
z
obiekt
sterowania
y
i
u
i
u
D
x
C
y
u
B
x
A
x
u
D
z
C
y
u
B
z
A
z
z
z
z
z
z
P
x
x
P
z
1
1
P
T
Tm, Tn – MACIERZE TRANSFORMACJI
Wyszukiwarka
Podobne podstrony:
lab06SSr2014ppt
więcej podobnych podstron