Hexapod Robot
Dalhousie Mechanical Engineering
Senior Year Design Team 2
To
Dalhousie University
Mechanical Engineering Department
December
1,
2008
Rene
d’Entremont
Brett
MacDonald
Leslie
Ssebazza
Seth
Stoddart

ii
Abstract
The Hexapod Walking Robot designed by Group#2 is in the end stages of design. A final iteration
of chassis and leg design has been selected, and is such that walking speed is maximized. Prior
designs have been discarded based on complexity or physical motion limitations. Prototypes
have been both physically and virtually (Matlab Simulink) constructed with success in order to
demonstrate proof of concept. Current programming is able to produce a single step, using the
desired tripod gait, for one leg only. This program has been used to make the physical prototype
move in the stepping motion. The basic positioning code has been written and is ready to enter
the motion planning stage. Aspects of the project still to be completed include manufacturing
and assembly as well as communication between the full driving programs and the Hexapod.
These
will
be
finished
in
the
coming
term.

iii
Table of Contents
Abstract........................................................................................................................................... ii
Table of Contents............................................................................................................................iii
List of Figures ..................................................................................................................................vi
List of Tables ...................................................................................................................................vi
1
Introduction ............................................................................................................................ 1
1.1
Background...................................................................................................................... 1
1.2
Project Description .......................................................................................................... 1
2
Design Requirements.............................................................................................................. 3
2.1
Primary ............................................................................................................................ 3
2.1.1
Design...................................................................................................................... 3
2.1.2
Mobility................................................................................................................... 3
2.2
Secondary ........................................................................................................................ 4
3
Design Alternatives ................................................................................................................. 5
3.1
Alternative 1: Mobility ‐ Spider, Outboard Rotate .......................................................... 5
3.2
Alternative 2: Smooth‐ Central Suspension Pivot............................................................ 5
3.3
Alternative 3: Fast‐ Central Rotation, No Suspension ..................................................... 6
3.4
Design Selection .............................................................................................................. 7
4
Design Refinements ................................................................................................................ 9
4.1
Securing Servo Motors .................................................................................................... 9
4.2
Suspension and Grip...................................................................................................... 10
4.3
Rapid Prototype............................................................................................................. 11
5
Final Design........................................................................................................................... 12
5.1
Overview........................................................................................................................ 12
5.2
Frame............................................................................................................................. 12
5.2.1
Description............................................................................................................ 12
5.2.2
Fabrication ............................................................................................................ 13
5.2.3
To Be Determined ................................................................................................. 13
5.3
Legs................................................................................................................................ 13

iv
5.3.1
Description............................................................................................................ 13
5.3.2
Fabrication ............................................................................................................ 15
5.3.3
To Be Determined .....................................................Error! Bookmark not defined.
5.4
Control Hardware .......................................................................................................... 15
5.4.1
Description............................................................................................................ 15
5.4.2
Fabrication ............................................................................................................ 16
5.4.3
To Be Determined ................................................................................................. 16
5.5
Control Software ........................................................................................................... 16
5.5.1
Motion Planning.................................................................................................... 16
5.5.2
Conversion ............................................................................................................ 17
5.5.3
Communication..................................................................................................... 18
6
Testing................................................................................................................................... 19
6.1
Finite Element Analysis (FEA) ........................................................................................ 19
6.1.1
Model Description................................................................................................. 19
6.1.2
Results................................................................................................................... 19
6.2
Hexapod Motion Simulations ........................................................................................ 20
6.2.1
Simulink................................................................................................................. 20
6.2.2
Virtual Reality Toolbox.......................................................................................... 21
6.3
Working Leg................................................................................................................... 22
6.3.1
Mechanical............................................................................................................ 22
6.3.2
Hardware .............................................................................................................. 22
6.3.3
Software................................................................................................................ 22
7
Project Status........................................................................................................................ 24
7.1
Progress......................................................................................................................... 24
7.2
Technician Time............................................................................................................. 24
8
Budget................................................................................................................................... 25
9
Conclusion and Recommendations....................................................................................... 27
Appendix A: 2 DOF Inverse Kinematic MATLAB program ............................................................. 28
Appendix B: Angles to Registry Format Converter Code .............................................................. 30
Appendix C: Winter Term Gantt Chart.......................................................................................... 31
Appendix D: Simulink Gait ............................................................................................................ 33
Appendix E: Fabrication Drawings ................................................................................................ 35
v

vi
List of Figures
F
IGURE
1:
O
UTBOARD
M
OUNTED
L
EG
A
SSEMBLY
...................................................................................................... 5
F
IGURE
2:
C
ENTRAL
P
IVOTING
L
EGS
A
SSEMBLY
......................................................................................................... 5
F
IGURE
3:
L
EG OF THE
I
NBOARD
M
OUNTED
C
ONFIGURATION
...................................................................................... 6
F
IGURE
4:
I
NBOARD
M
OUNTED
L
EG
A
SSEMBLY
......................................................................................................... 7
F
IGURE
5:
S
ELECTED
D
ESIGN WITH LEG AND BODY WEIGHT CONSIDERATIONS
.................................................................. 9
F
IGURE
6:
R
EFINED
L
EG
A
SSEMBLY
,
USING ALL FOUR BOLT HOLES
. .............................................................................. 10
F
IGURE
7:
S
PRING RATED
S
HOCK ABSORBERS
(
HTTP
://
WWW
.
MCMASTER
.
COM
/
CATALOG
/114/
GFX
/
LARGE
/3740
KC
1
L
.
GIF
). 10
F
IGURE
8:
N
EOPRENE
B
UMPER
(
HTTP
://
WWW
.
MCMASTER
.
COM
) .............................................................................. 11
F
IGURE
9
:
F
INAL
D
ESIGN OF
H
EXAPOD
R
OBOT
....................................................................................................... 12
F
IGURE
10
:
B
OTTOM
V
IEW OF
F
RAME
A
SSEMBLY
................................................................................................... 13
F
IGURE
11
:
L
EG
A
SSEMBLY
................................................................................................................................. 14
F
IGURE
12
:
T
HREE
L
EG
S
ECTIONS
,
NAMED AS THE
“F
IRST
,
S
ECOND AND
T
HIRD LEG SECTIONS
”
(
LEFT TO RIGHT
).................. 15
F
IGURE
13:
V
ON
‐M
ISES
S
TRESS OF THE
F
IRST
B
AR
L
INKAGE
...................................................................................... 20
F
IGURE
14:
B
LOCK
D
IAGRAM REPRESENTATION OF A DIFFERENTIAL MECHANICAL SYSTEM
................................................ 21
List of Tables
T
ABLE
1:
W
EIGHTED
C
OMPARISON
T
ABLE
............................................................................................................... 7
T
ABLE
2:
S
ERVO
S
PECIFICATIONS
S
UMMARY
............................................................................................................. 8
T
ABLE
3:
E
STIMATED
M
ACHINING
T
IME
R
EQUIRED FROM
D
EPARTMENT
...................................................................... 24
T
ABLE
4:
P
ROPOSED
B
UDGET
.............................................................................................................................. 25
1
1 Introduction
1.1 Background
The Hexapod Remotely Operated Vehicle (ROV) was first proposed as a project by Dr. Pan
of Dalhousie University as an idea for the Mechanical Engineering Senior Design Project.
The idea of building robots and ROVs for design project is not new, as tracked, wheeled,
and water based ROVs have all been produced in the past, but leg based ROVs have yet to
be attempted. The challenges are obvious as walking is a complicated method of
travelling that required a complex control system to coordinate the movements.
However, the benefits are numerous. Legs offer more freedom of movement to the
chassis of the ROV; it may level itself on uneven terrain, tackle obstacles that wheels (of a
proportionate size) may not, and move in all directions without changing the orientation
of the body. Legs can also be used to manipulate objects with some precision or adjust
the height of the body for increased stability or travel into restricted spaces. Overall, the
freedom of motion provided by legs is extremely useful, with few drawbacks (beyond the
complex programming). One such drawback is the low forward speed that most walking
robots are able to accomplish. The group has identified this as a challenge and an area for
improvement over traditional hexapod designs. The project will be unique from other
hexapods since it is intended to be a platform onto which additional sensors can be
mounted, making it capable of doing many different tasks. In comparison, other hexapods
tend to be simply a body and legs and are designed onto to move around. The group will
design a chassis and legs, and initial and final control systems. The intent is that the
finished product be mechanically capable and upgrade friendly, so future iterations can
accomplish increasingly complex tasks and motions.
1.2 Project Description
The ROV will have 18 degrees of freedom (DOF) as stated in the design requirements. To
be as mechanically sound as possible, the robot will use a modular design, where a small
list of spare parts may be kept on hand to repair the robot in the case of failure. These
parts may be swapped in and out easily. Leg parts will be the same for both sides, with
only assembly of the parts differing. All 18 servos (1 DOF each) will be the same type and

2
are low cost and highly available. The body will contain a large surface to mount
electronics for this project, and future iterations.
Electronic hardware used on the robot will be purchased with development in mind;
additional ports for servos will be available, analog and digital inputs and outputs on the
microcontroller will be available (for sensors and upgraded controls), and should it be
desired, the ROV could accept a battery pack and onboard programming to become
completely autonomous. Some of these goals are outside of the project scope for this
year, but the ROV will not be limited in its capabilities.

3
2 Design Requirements
Using our objective of creating an instrument and development platform we developed a set of
design requirements for the hexapod robot. The requirements were separated into primary and
secondary items. The primary requirements included aspects that dealt with hexapod design,
motion control and future considerations. The secondary requirements are those that deal with
appearance and ease of use.
2.1 Primary
Information related to the design geometry and size had to be determined based on the
tasks the hexapod has to achieve and the scale of the robot.
2.1.1 Design
The body size (not including legs) is to be smaller than 15”x12” and the total length of
the legs should be between 4” and 10”. The legs will be of a modular leg design which
allows easy maintenance and repair when needed. The robot weight should be no more
than 12lbs. It will be a tethered design but should be of such a size and mass that one
person will be able to manually maneuver and transport the entire assembly. The
materials that will be used will include strong, light, low cost aluminum and plastic
(PVC). Additional requirements are that the hexapod will have a load carrying capacity
of at least 2lbs. It should also include mounting positions where additional sensory
components could be added.
2.1.2 Mobility
The main mobility criterion is to have a full 18 Degrees of Freedom (DOF): Each leg will
be capable of 3 independent DOF and have a range of motion so that it can extend its
legs parallel to the ground. This will ensure that future iterations of the robot will not be
limited in performable motions.
The minimum mobility requirements for the robot include walking forward, backwards
and turning. More motions, or complex methods of performing the listed motions, may

4
be within the project scope depending on time constraints. Forward and backward
walking speeds must be at least 3 in/sec. The turning speed must be ninety degrees of
rotation in less than 10 seconds. The robot body will be able to operate with ground
clearances ranging from 2‐10 cm.
2.2
Secondary
The secondary requirements deal with ease of use and appearance. They include
programming considerations, life cycle, safety, and operation instructions. Program
coding will be simplified and compartmentalized with consistent notarization for easy
comprehension. An open source approach will allow easy modification of the
programming for future iterations. The program used should be universal to the
engineering community. A user’s manual will also be supplied, detailing how to operate
and maintain the hexapod robot to ensure smooth and reliable operation.
All electronics will be bundled and guarded to avoid electrocution hazards. All wear parts
will be contained in the modular leg design. The legs are considered replaceable, so
simple leg replacement will mean that the robot will have no finite lifespan. Servo motors
contained within the legs will be the limiting factor in leg lifespan. Our group desires 100
operational hours of use from servos in this application. Finally, the hexapod robot should
have a clean and uncluttered appearance.
5
3 Design Alternatives
3.1 Alternative 1: Mobility Spider, Outboard Rotate
As shown in Figure 1, this design has
the legs mounted at equal distances
on each side of a platform body. It is
the simplest option, where the pivot
servos are mounted closely together.
The result of this configuration is
shorter legs which can rotate through
a larger angle without colliding with
other legs, therefore providing higher
angular rotation speeds. This design
also incorporates the use of large (42
kg/cm) servo motors to allow for a
higher weight capacity load on the platform. The outboard mounting design means that
the modular legs are simply mounted to the outer perimeter of any body shape desired.
However, this layout has a limited forward walking speed (as speed is directly related to
the angular rotational speed and radius to the leg tip). While investigating the large servo
motors, it was noted that when powered, under no torque loading, each servo drew
approximately two amps of current. Therefore a combination of high torque servos would
require a very large power supply.
3.2 Alternative 2: Smooth Central Suspension Pivot
The distinguishing feature of design 2 is
that all of the legs are mounted on, and
pivot about, two long rods located in the
center of the body, shown in Figure 2.
This gives all of the legs the freedom to
rotate in the vertical plane. With the use
Figure 1: Outboard Mounted Leg Assembly
Figure 2: Central Pivoting Legs Assembly
6
of compression springs connected between the body and the first motor mount position
(not shown in drawing), this design would provide a level of shock absorption. The benefit
of this is that the robot could handle rough or demanding use better than the other
designs which are rigidly connected. The drawback is the complexity associated with
adding the compression springs since twelve of them would be needed. Another feature
is the ease of assembly and disassembly. Once the end piece (holding the end of the rods)
is removed and the wires are disconnected the motors would slide out easily. This design
uses that same small servo motors that will be discussed in design alternative 3. It also
has the same benefits associated with inboard mounted motors that will be discussed in
design 3.
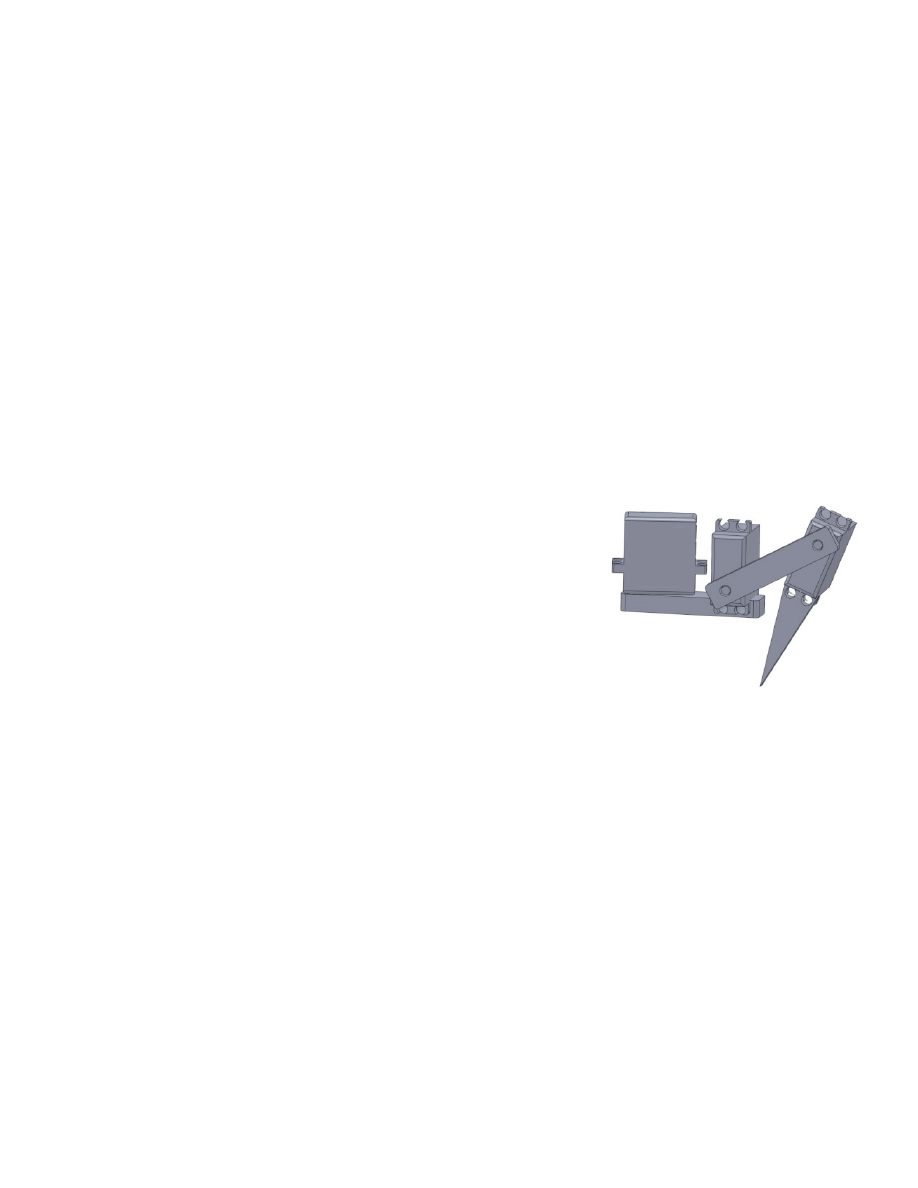
3.3 Alternative 3: Fast Central Rotation, No Suspension
To provide the highest possible forward walking speed
and higher rotational speeds, a larger leg tip radius is
required, shown in Figure 3. In order to achieve the
highest speeds without adding additional torque to the
legs, a longer arc length is created using an extended
member between the leg swing servo and the first
knuckle servo. Extending this leg member would increase
the footprint size of the robot. So to avoid this, the
extended member that pivots the leg will be mounted
inboard of the body, as seen in Figure 4. Additionally, this design uses smaller servo
motors (9.6 kg/cm) that draw much less current (0.76A at stall torque) than the larger
ones used in design 1. This allows all of the motors to be run using a smaller power supply
and tether.
Figure
3:
Leg
of
the
Inboard
Mounted
Configuration
7
Figure 4: Inboard Mounted Leg Assembly
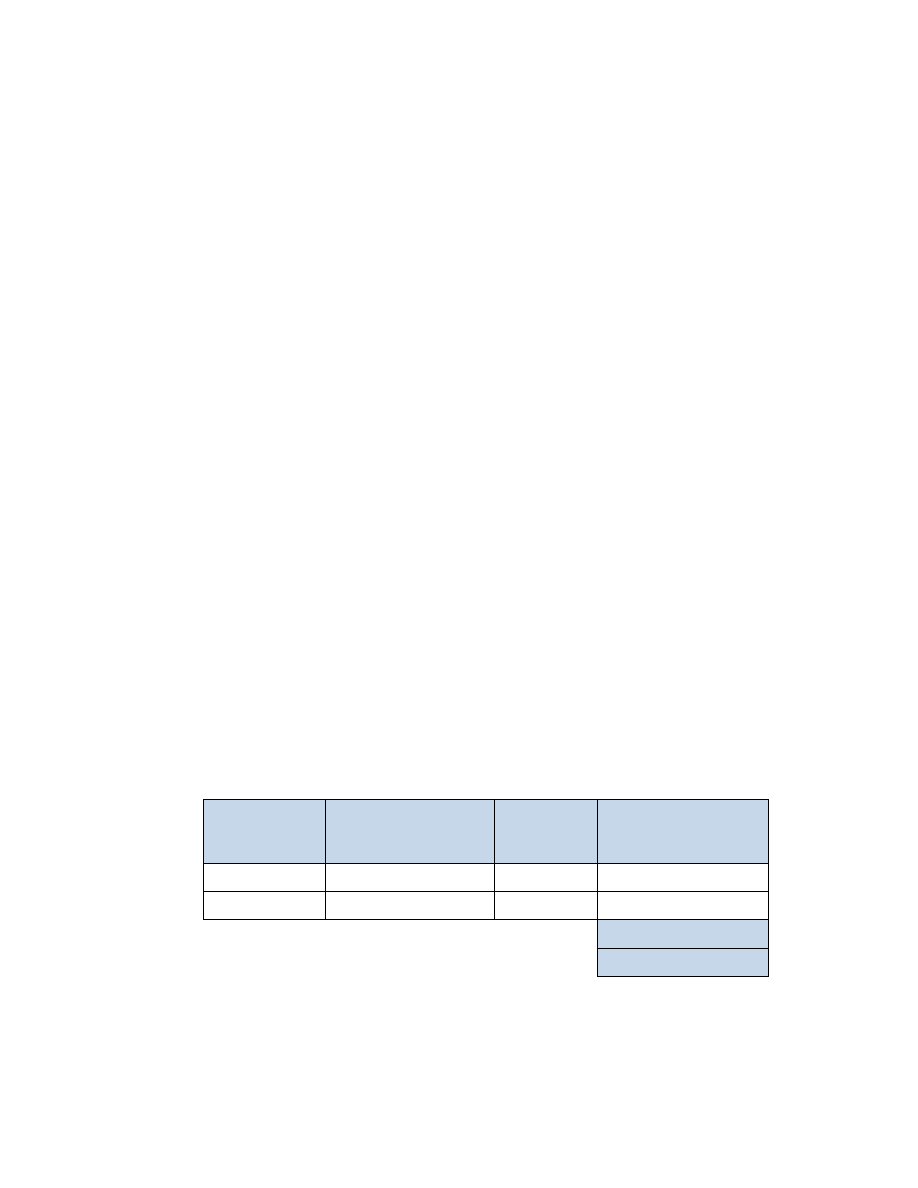
3.4 Design Selection
A comparison of the three designs is given in Table 1 below. Each design requirement is
rated according to relative importance then each design is assigned a grade. A higher
value represents better performance in all cases. Design alternative number three
emerged as the clear winner.
Table 1: Weighted Comparison Table
Weight Design 1 Design 2 Design 3
Forward/Backward Walking Speed
5
3
5
5
Rotational Speed
3
3
2
2
Ground Clearance Range
3
1
3
3
Load Carrying Capacity
3
3
2
2
Ease of Assembly/Disassembly
3
3
1
2
Durability
3
2
3
3
Complexity
5
5
2
5
Cost
4
2
4
4
Total
(29)
22
22
26
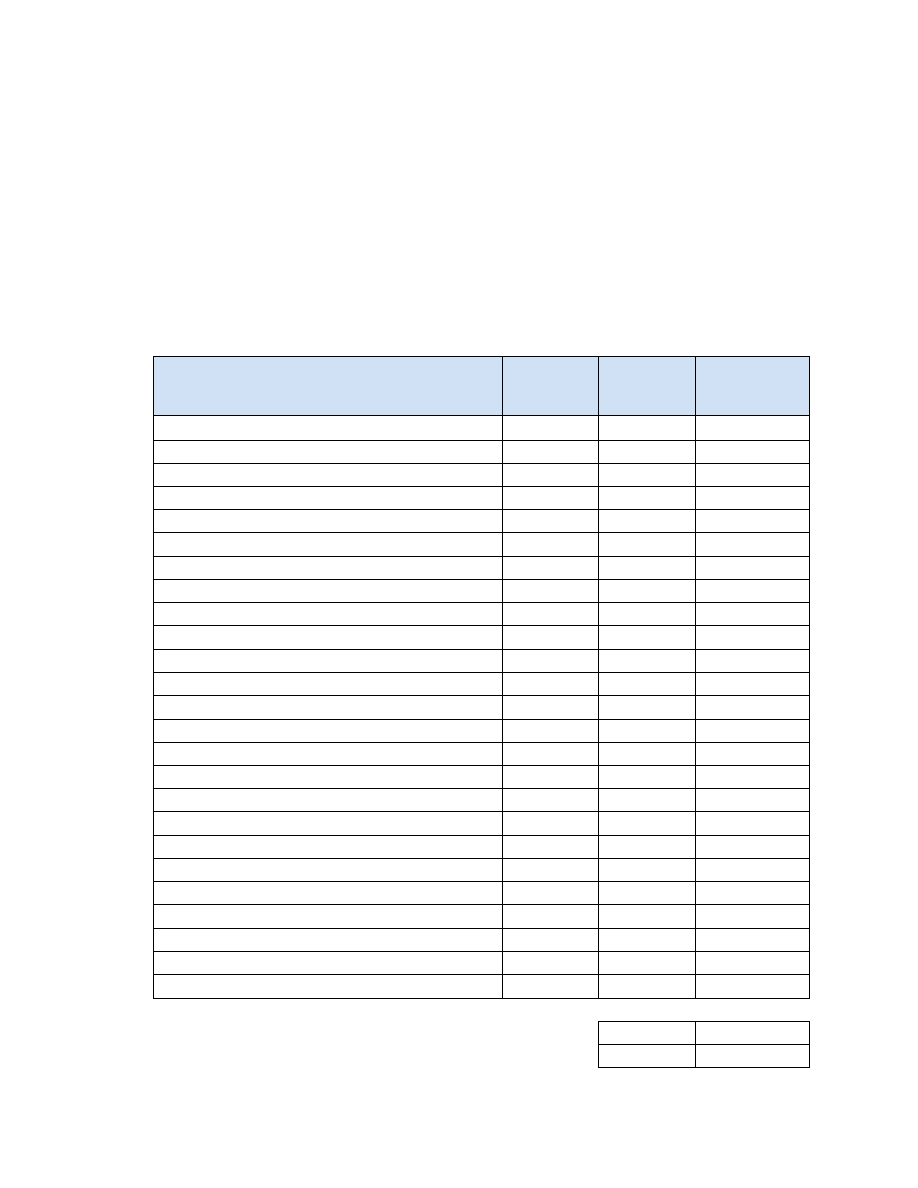
As well, the performance of servo motors varies greatly with respect to size, torque and
power consumption. A comparison of several servo motors is shown in Table 2. It can be
seen that as the servo torque increases, so does the required power. Since the hexapod
8
will require a total of 16 servos, the correct selection of servo motors is necessary to build
a safe functional robot. The design selection took into consideration the servo
characteristics as well.
Table 2: Servo Specifications Summary
Servo Name
Torque (kg*cm) Weight (g) Power Consumption
HS‐805BB Giant Scale
24.7
152
1.7A No Load
HS‐765HB "Sail Arm" Servo Motor
13.2
110
1A No Load
HS‐645MG Servo Motor
9.6
55.2
0.75A Stall torque
GWS Heavy Duty S777 6BB Servo Motor
42
190
2A No Load
9
4 Design Refinements
The selected design went through several modifications during the term. The leg design was
altered to ensure a more secure servo motor connection and a good floor contact during
operation. A hexapod leg was then prototyped and from it evolved some further design changes
that will be in our final hexapod design.
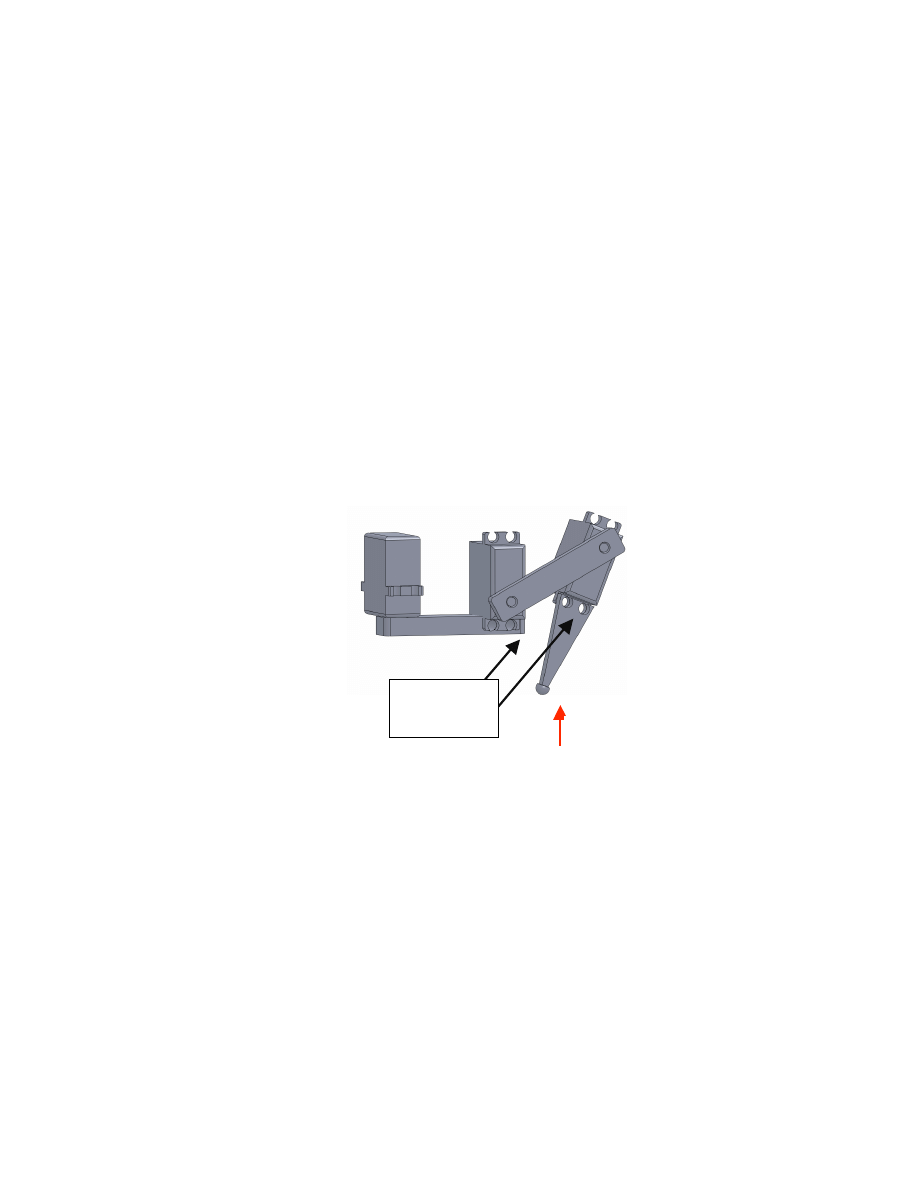
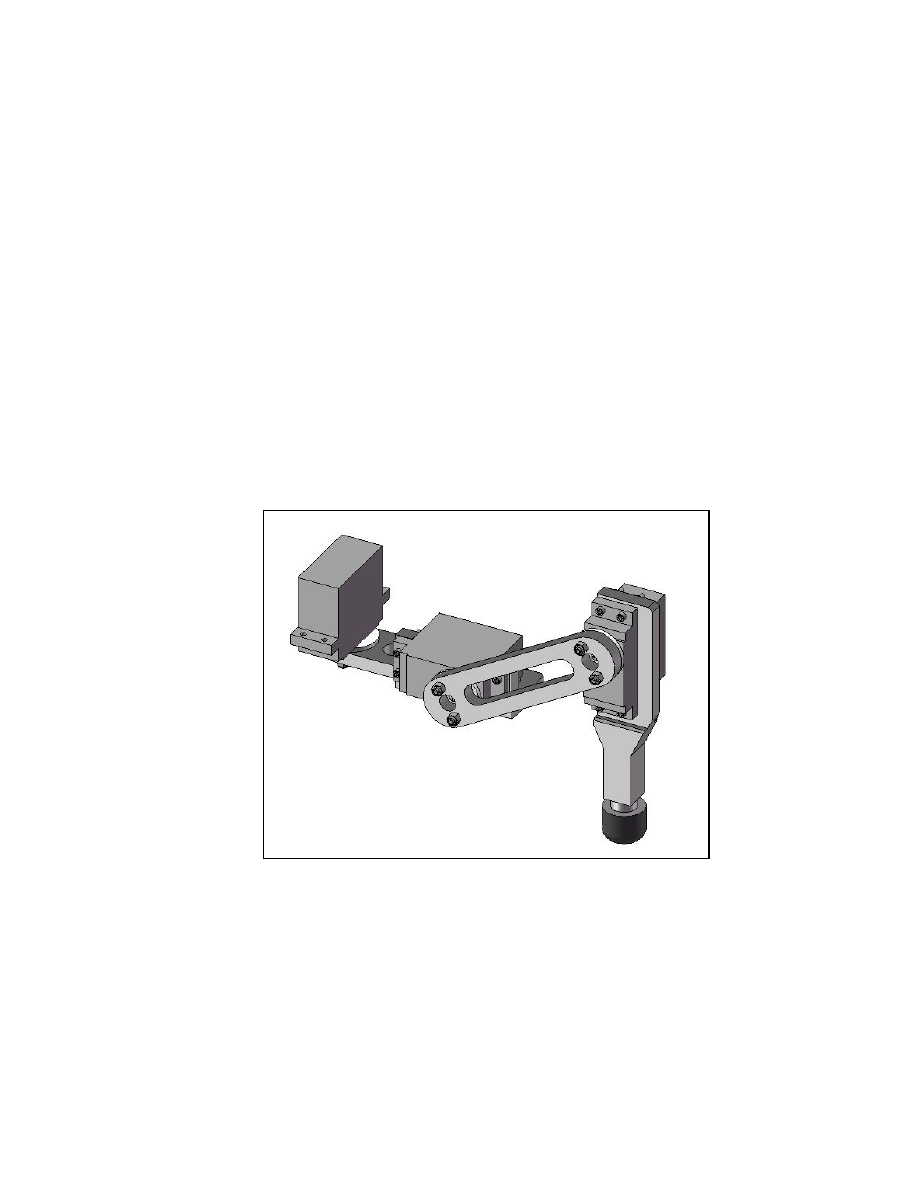
4.1 Securing Servo Motors
In the initial design for the leg, the servo motors were mounted to the leg sections using
only two connection bolts. It was determined that this configuration, shown in Figure 5,
would concentrate the majority of the weight on the two servo contact points.
Although the overall load would not be of a large magnitude the servo motors would
need to be secured tightly to eliminate any unnecessary movement of the servo motor. If
not secured tightly, the moment and shear force created at these two servo contact
points will loosen the fasteners that hold the servo and leg sections together. The design
was therefore changed to better secure the servos as shown in Figure 6. This design uses
all four connection bolts of the servo mounting flange.
Figure 5: Selected Design with
body weight considerations
W (body)
2 sets of
fastening
contact
points
10
Figure 6: Refined Leg Assembly, using all four bolt holes.
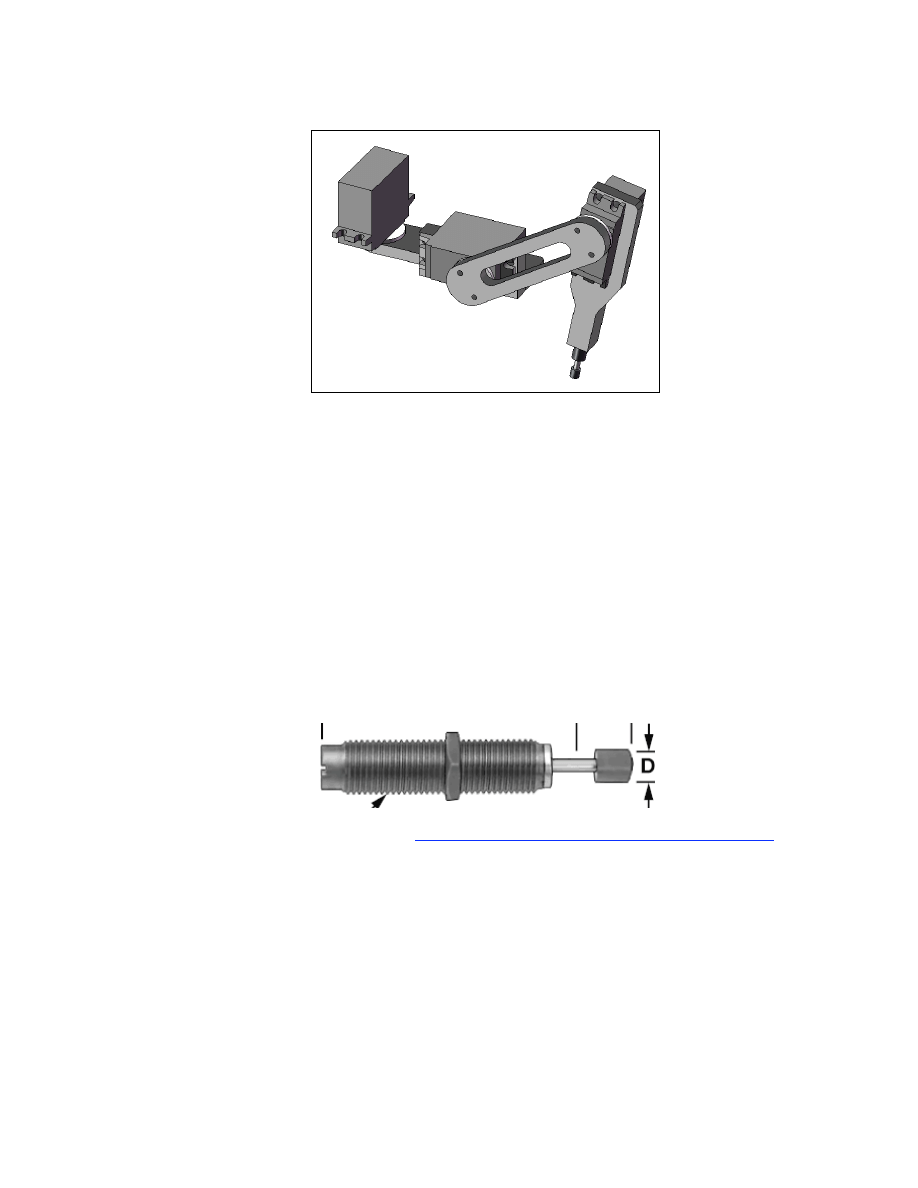
4.2 Suspension and Grip
The hexapod feet were modified after the design selection to provide the hexapod with
some suspension and better grip during operation. The initial selected design shown in
Figure 5, included soft rubber padding at the ends of the legs that would act as a cushion
with some spring characteristics. Unfortunately after doing some research into possible
materials it was found that for the scale of the robot most rubber materials would be too
stiff to be effective shock absorbers. The next idea was to use a set of shock absorbers
shown in Figure 7 that would be fastened into the leg ends as shown in Figure 6.
Figure 7: Spring rated Shock absorbers (
http://www.mcmaster.com/catalog/114/gfx/large/3740kc1l.gif
)
The issue with this idea was that the Delrin material used at the end of the shocks was
very slippery and would not provide adequate grip for walking. Since grip is very
important for motion and each absorber costs $28.13, which is high, we chose to use a
contact bumper, shown in Figure 8.

11
Figure 8: Neoprene Bumper (http://www.mcmaster.com)
This bumper is made from neoprene, a material that provides better grip, and should
provide some spring like characteristics for a smoother walk during operation.
4.3 Rapid Prototype
After receiving some suggestions from the technicians, the team decided to build a
prototype leg for control and possible destructive testing purposes. The hexapod leg
prototype was built using the rapid prototyping machine of the Dalhousie University
Mechanical Engineering Department. The process took a total of three hours to complete
and cost an approximately $14 to build. With the leg prototype built, we reassessed the
design and found that the end leg section, with the threaded hole, would be better if it
was altered so that the threaded hole was centered on the mid‐plane of the piece.
Another design suggestion that came from the prototype leg was to drill a hole in the
second section of the leg section which would make it easier to assemble. The simplicity
of the rapid prototype method of producing leg sections made it an attractive option for
construction of the final product. Testing verified the rapid prototype plastic would be of
adequate strength to meet design requirements, and as such would be used to construct
the
finished
parts.
12
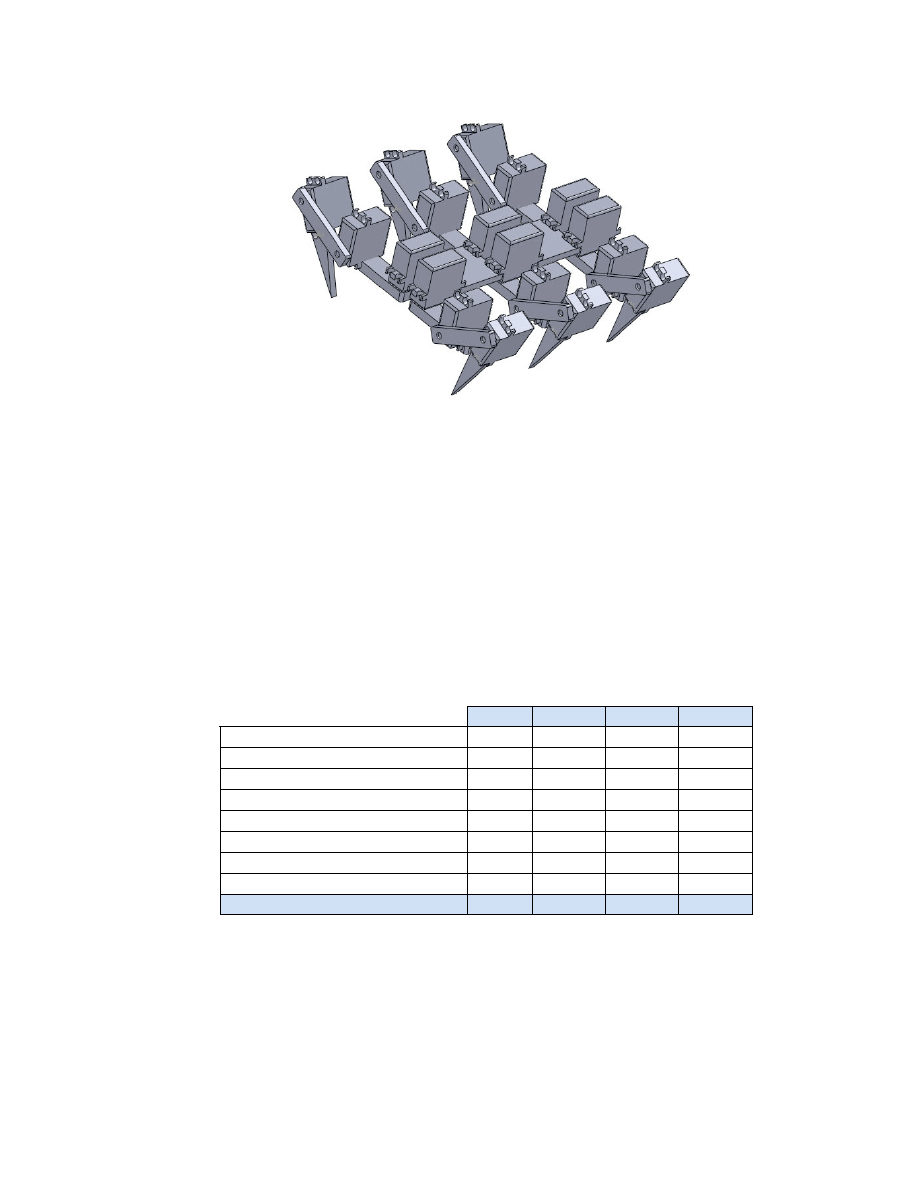
5 Final Design
5.1 Overview
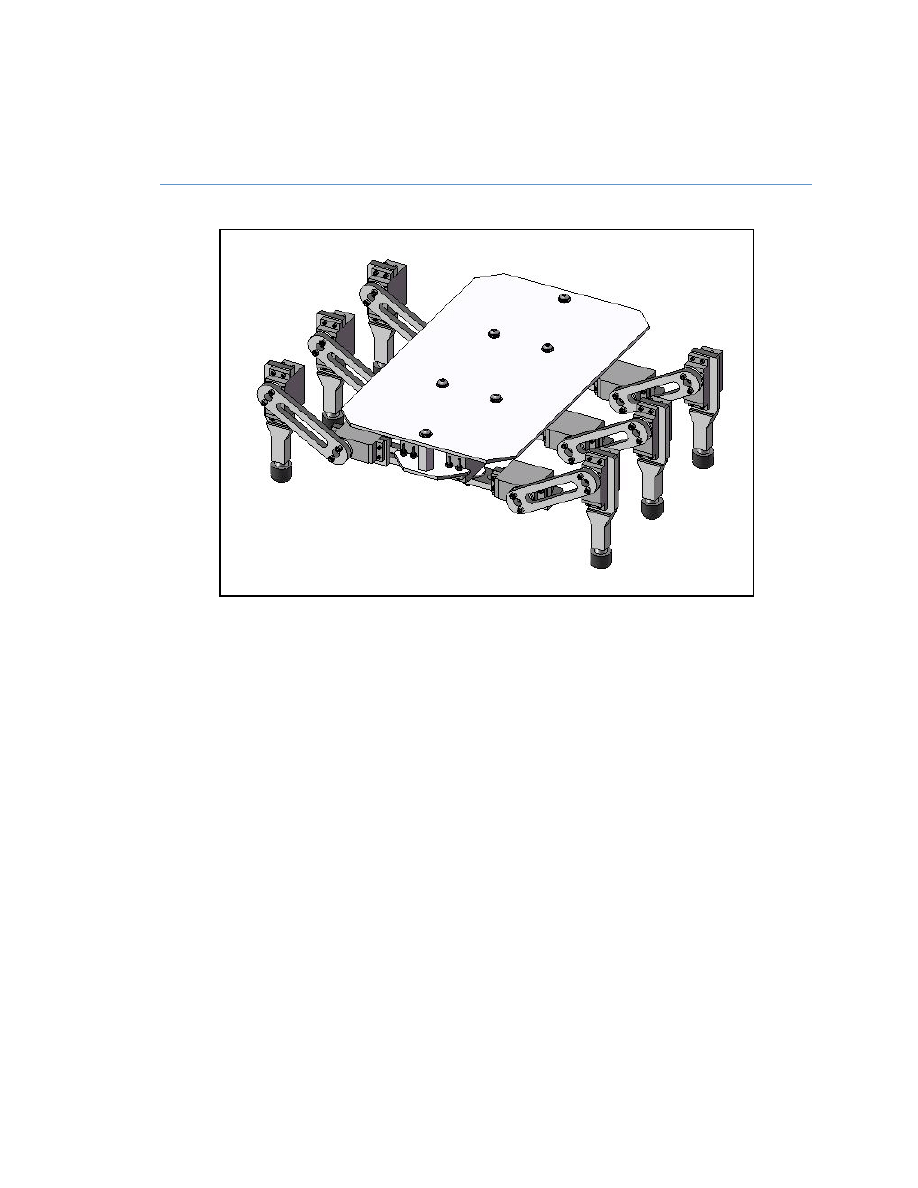
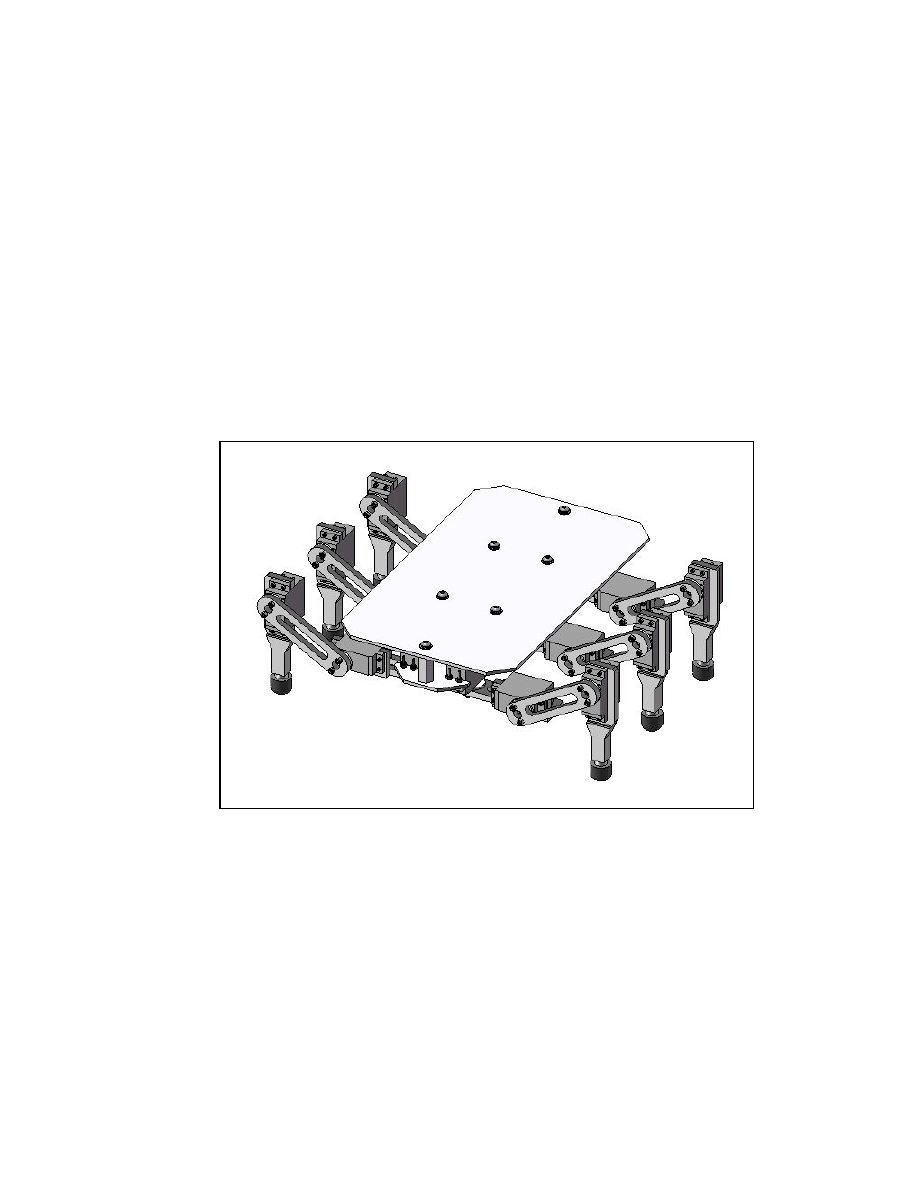
The final design of the robot was arrived at after the improvements from the design refinement
stage were incorporated into the original selected design. This final design is depicted in Figure
9. There are six modular legs that connect to the bottom part of the frame and there is plenty of
space available on the top plate for mounting electronic equipment. All fastening details have
been worked out and the parts are ready to be fabricated. The major components of the robot,
including mechanical and programming aspects, will now be presented in detail.
Figure 9 : Final Design of Hexapod Robot
5.2 Frame
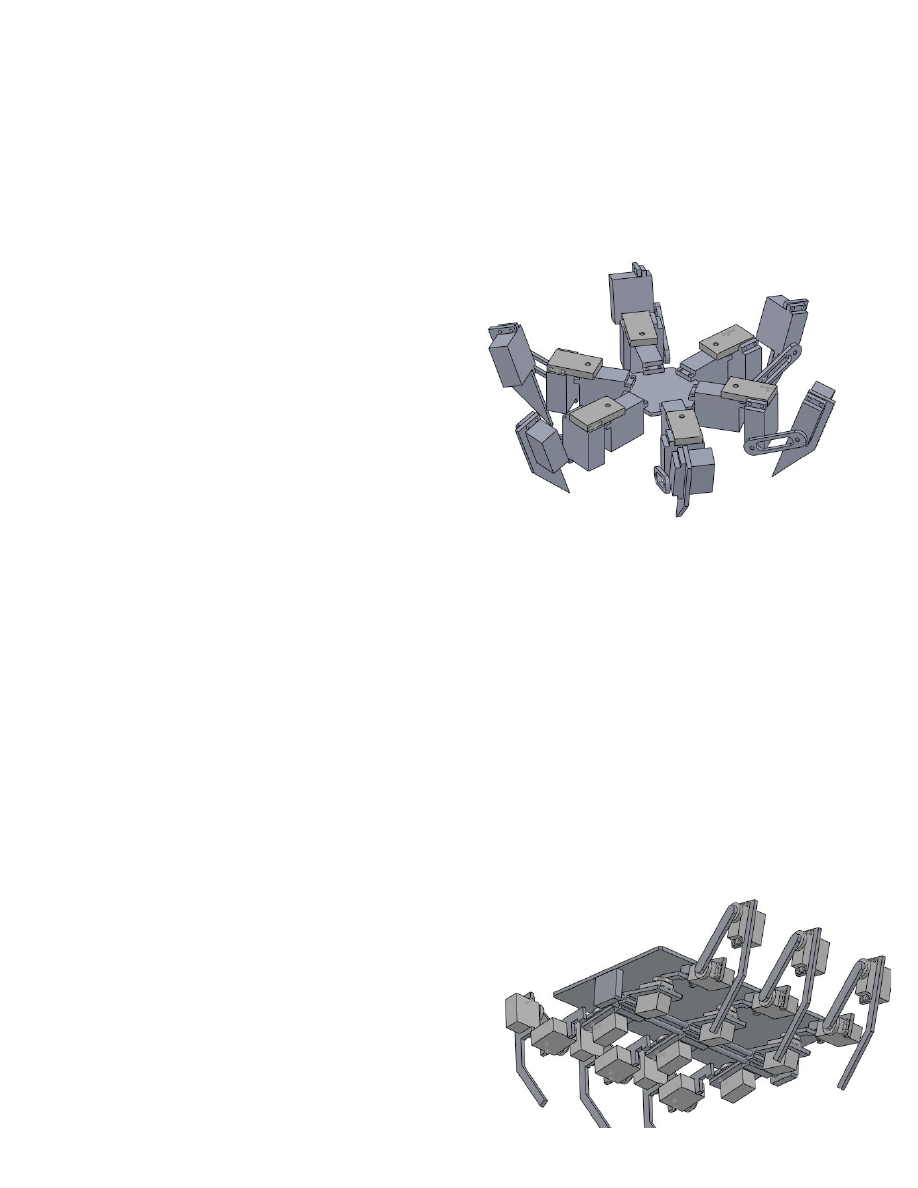
5.2.1 Description
The frame of the robot consists of two .078” aluminum plates that are bolted together
using six commercially available standoffs, as illustrated in Figure 10. The smaller plate is
used for mounting the legs, while the larger plate is used for mounting electronic
equipment such as the microcontroller boards. As well, there is extra space on the large
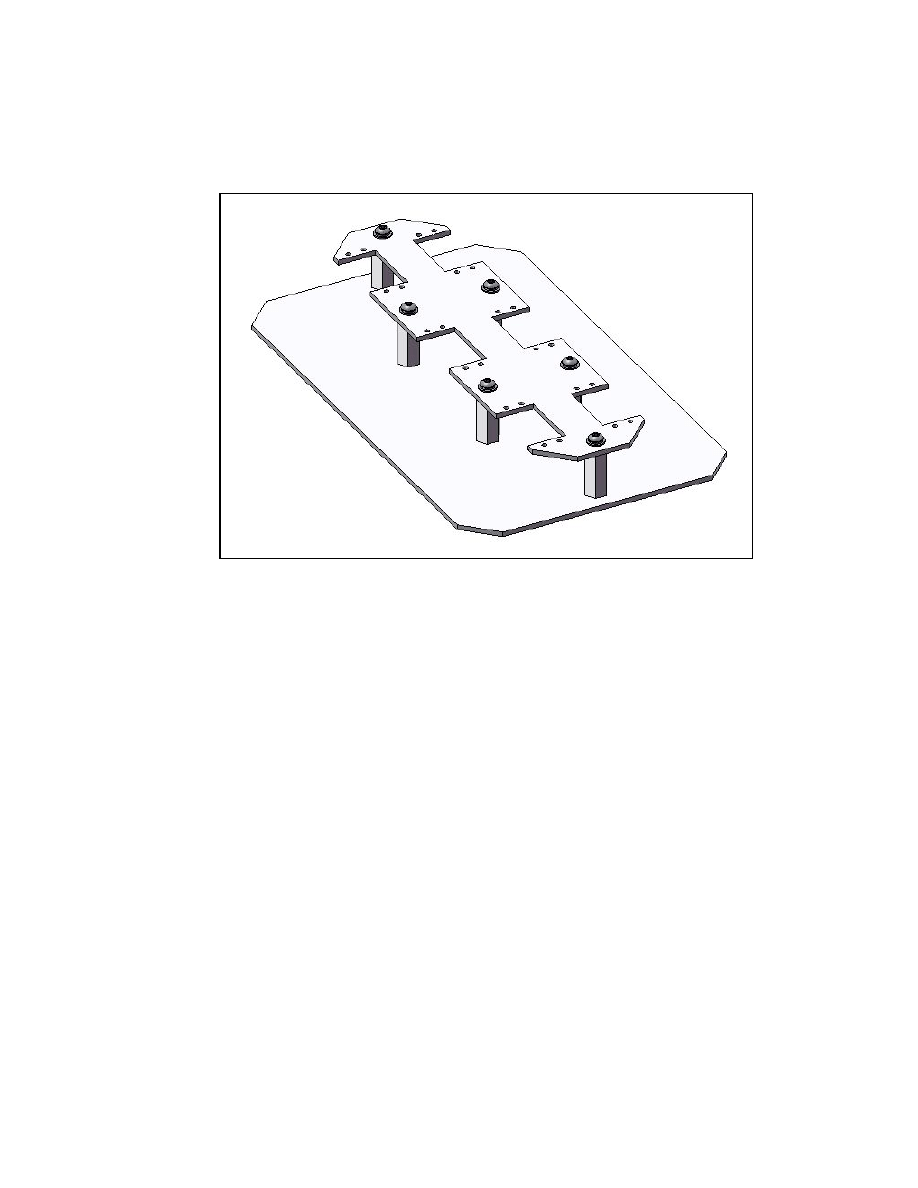
13
plate so additional electronic equipment and sensors could be added to the robot in the
future, in accordance with the design requirements.
Figure 10 : Bottom View of Frame Assembly
5.2.2 Fabrication
The two aluminum plates will be machined and drilled by the department technician.
The standoffs are a purchased part and come threaded at both ends. Assembly is simple
and will be done by the team.
5.2.3 To Be Determined
The large plate is used for mounting the electronic equipment. This includes the two
microcontrollers as well as any additional sensors that might be added later on in the
project. Cutouts will need to be made in the large plate to allow wires to pass through.
The layout of the electronic equipment and associated cutouts has not been finalized
yet. However, this is not a pressing issue and will wait for final assembly.
5.3 Legs
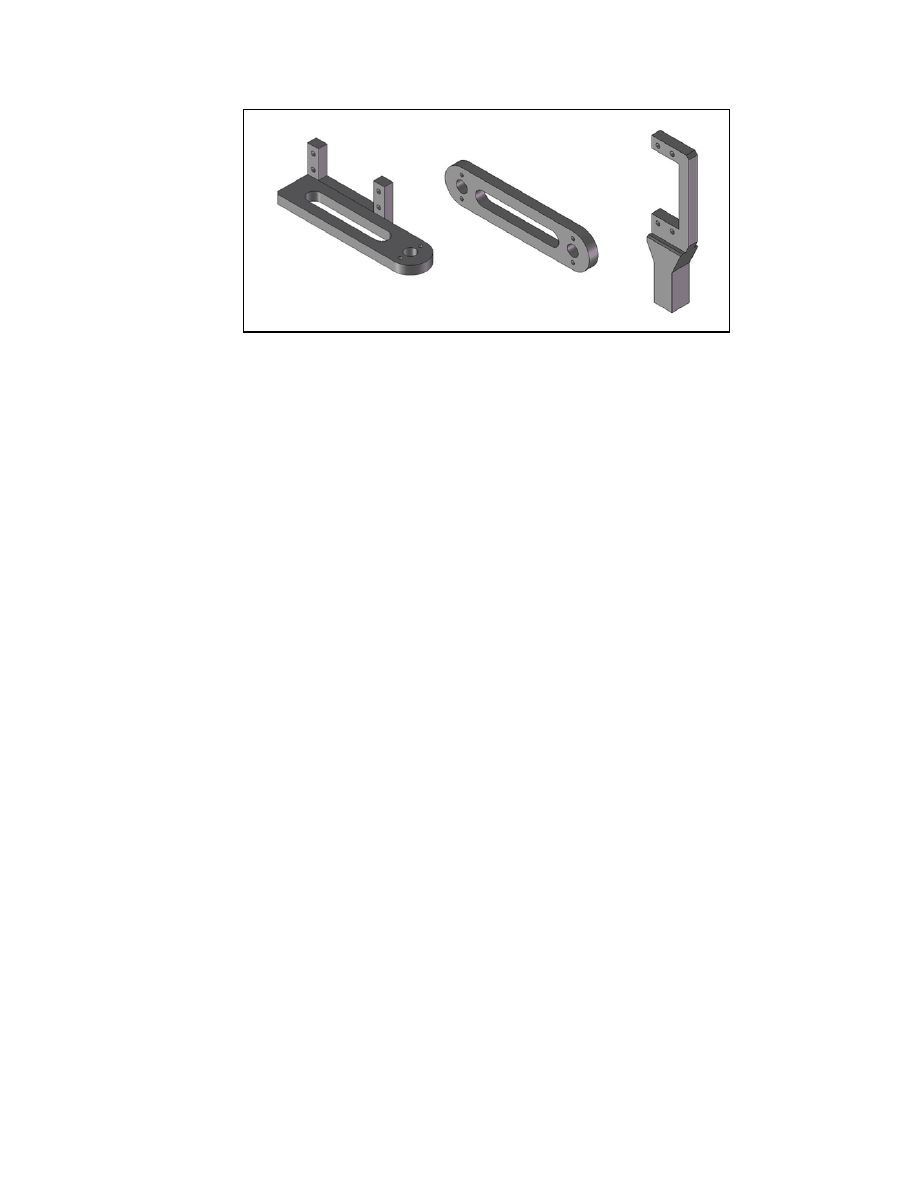
5.3.1 Description
Each of the six legs will contain three servomotors that are connected by three leg
sections as shown in Figure 11. For a better view of the individual leg sections, see
Figure 12. The leg sections are named as the first, second and third leg sections, with the
14
first leg section being the one joined to the frame. They are simple pieces and are
shaped in a manner that allows simple connections with the servomotors. Additionally,
there are small neoprene feet (commercially available) that thread into the third leg
section. These will provide adequate traction as well as shock absorption to reduce the
stress within the joints.
Each leg section will be manufactured using the Mechanical Department’s rapid
prototype machine. Afore mentioned testing has verified that the parts will be robust
enough to meet design requirements and, due to the prototyping process, be available
at a much earlier date. The inner and outer leg sections will come in a left and right
handed variety while the middle leg section will be the same on both sides. The leg
sections will be bolted to the servomotors using small #2 bolts at the servo mounting
flanges and at the servos mounting disk (attached to output shaft).
Figure 11 : Leg Assembly
15
Figure 12 : Three Leg Sections, named as the “First, Second and Third leg sections” (left to right)
5.3.2 Fabrication
Manufacturing of the leg sections will be performed from Solid Works drawings produced during
the design stages. These drawings are forwarded to Craig Arthur to be set to run on the
prototyping machine. The final parts will come out needing small modifications to remove
support material. Reaming holes to finished diameter will be completed by the team, as well as
drilling of mating holes in the servo mounting flanges. All final assembly will be completed by
team members.
Technician time is required to machine aluminum components and is detailed in table 3.
5.4 Control Hardware
5.4.1 Description
To control the hexapod’s movements, two boards would be used: a servo control board
to send timed pulses capable of setting servo positions, and a microcontroller to send
and receive signals onboard the hexapod.
To control servos, a Devantech SD‐21 Servo Control Board was selected. In addition to
its low cost, the SD‐21 has pin connections for up to 21 servos for which it can control
the position and speed through integer inputs. The board will satisfy the ‘expandability’
component of the design by allowing an additional 3 servos for an added task specific
appendage. The SD‐21 is capable of receiving a basic stamp controller via one of two
standard sockets, and can communicate with an external controller through any of
three I
2
C connections. The latter option will be utilized in this design.

16
For the external microcontroller option used in this design, an Arduino Decimilla was
selected as its internal Wire library and I
2
C pins would allow simple interfacing with the
SD‐21. In addition, the Decimilla uses an onboard serial converter so that a common
USB A to B cable can be used to interface with a computer for serial communication.
The Decimilla has the added advantage of available analog and digital in/outputs, also
satisfying the expandability requirement.
5.4.2 Fabrication
To put a polished look on the controlling hardware, interconnects that utilize headers to
connect to both the male and female I
2
C ports will be fabricated by the group. The
interconnect cables will be labeled, or of a design such that the hexapod’s electronics
cannot be incorrectly assembled.
The boards will be mounted to the robot’s top plate using hex standoffs and all servo
cables will be bundled and routed through the hexapod’s body.
5.4.3 To Be Determined
Final positioning has not yet been determined. Cable routing will determine the final
position of the boards, and this cannot be finalized without a final model. Mounting is
uncomplicated and will require very little fabrication making it an acceptable TBD item.
5.5 Control Software
Software development will take place within Matlab using .m files. The programming
can be broken into 3 major components: motion planning, conversion, and
communication.
5.5.1 Motion Planning
There are two ways to control the hexapod robot. One involves having a set routine in
which every angle and timing pause are pre‐defined. The second and more complex
option involves telling what you want to robot to accomplish and the software
determine the leg path along with the necessary servo angles to perform the maneuver.
The hexapod robot will use the second option which will give the robot more flexibility
and a smoother movement.
17
Currently ongoing work involves writing an inverse kinematics (IK) program in which the
user of a path creation program defines two points of the leg movement, the start and
end point. From the know point, IK solves for the servo angle which will move the end
effector to its new position.
In order to determine the servo angle, the 3DOF problem was redefined as a 1DOF and a
separate 2DOF problem. This modification was possible since only the first servo was
capable of moving the leg in the back and forth direction. The servo also produces no
movement in the z direction. After the leg is pointed towards the end effector location,
the other two servos are responsible for extending the leg the correct distance and
providing the body lift. All servo angles are determined by trigonometry but the last two
are dependent on each other therefore simultaneous equations must be solved.
Once the IK program was written, leg path programming was the next step. A program
which takes two points, in X,Y coordinates, along with ROV body height and step height
was created. It creates a parabola between both points and divides it into discrete
points which the IK program calculates the angles required for each point and stores
them into a larger matrix.
To date, the software is capable of defining the proper servo angle to make the robot
leg complete one entire step between any two arbitrary points.
5.5.2 Conversion
The resulting output of the Motion Planning software will be in degrees and time
intervals. This data will need to be converted to be understood by the SD‐21 servo
control board. The SD‐21’s internal register stores four numbers pertaining to each
servo: a servo call, speed, and two positioning numbers. The servo call is a number given
to each servo’s registry spaces. When the servo call is sent to the SD‐21, the following 3
numbers will be assigned to the speed and position spaces. The speed number is set to 0
for full speed, or numbers 1 through 9 for slower movement. Finally, the position
numbers are the low and high bytes of the desired pulse width integer. Testing has
revealed that for the selected servos, the pulse widths used from lock to lock are in the

18
700‐2500 (micro‐second) range. The pulse width steps correspond to degrees
proportionally using the following formula:
∆ = 10∗∆ (3)
Where:
∆
= Desired change in degrees
∆
= Change in pulse‐width
The output of the conversion from degrees will be an integer within the pulse width
range. The integer needs to be split into integer representations of the high and low
bytes of this number. These parts may be found by converting to hexadecimal: the high
byte will be the first integer value, while the low byte will be the remainder once the
high byte has been multiplied by 256 and subtracted from the original value. A
converting algorithm has been written and is incorporated in the preliminary software
appendix package.
5.5.3 Communication
Once the appropriate conversion has taken place, the data is stored in matrices of leg
positions within Matlab. The matrices match the register on the SD‐21 board and are
sent through the serial port to the Decimilla for storage to be sent to the SD‐21 in a
timed sequence corresponding to the desired gait. Matlab’s serial communication
commands simplify this procedure. An additional serial monitor is added to open TX and
RX pins on the Arduino board for debugging purposes.
Once the gait has been calculated and stored on the Decimilla, the register must be
updated with positions corresponding to leg points. The Arduino board is able to open a
connection with the SD‐21 (using the aforementioned I
2
C ports), update the register,
and close the connection. This sets the servos in motion, roughly following the path
calculated in the motion planning stage.

19
6 Testing
6.1 Finite Element Analysis (FEA)
The strength of the leg links was a concern. A preliminary finite element analysis was
performed to ensure theses links would not fail in tension or compression. The leg section
subjected to the highest loading is the first section since it must support the load of the
robot and the torque of the servo along its axis of minimum moment of inertia. Therefore
only this link will be tested.
6.1.1 Model Description
Since only a rough stress profile was desired, it was appropriate to quickly mesh the
model using 3D tetrahedral elements. Another advantage to the tetrahedrons is the
ability to auto‐mesh the solid part. An initial element size of 1.5mm was used, then
varied up to 3mm and down to 0.75mm to ensure a consistent result.
The Program used in this analysis is Unigraphics NX 5.0 which uses the Nastran NX
solver. The material model used was the pre‐defined NX 5.0 model for PVC, which
include a Young’s modulus of 300 MPa and a Poisson’s ratio of 0.4.
The loading for the leg linkage was composed of two parts, the vertical force which
keeps the robot suspended, and the torque produced by the servo. The Vertical force
used was 9.4N which simulated the 9.8Kg*N of torque applying a force 6 cm from the
rotation axis. The torque applied was 0.981 N*mm which is the rated capacity of the
servo itself.
To simulate being attached to a servo at the body, the two smaller mounting holes seen
at the bottom right of Figure 13 where fixed in all 6 DOF.
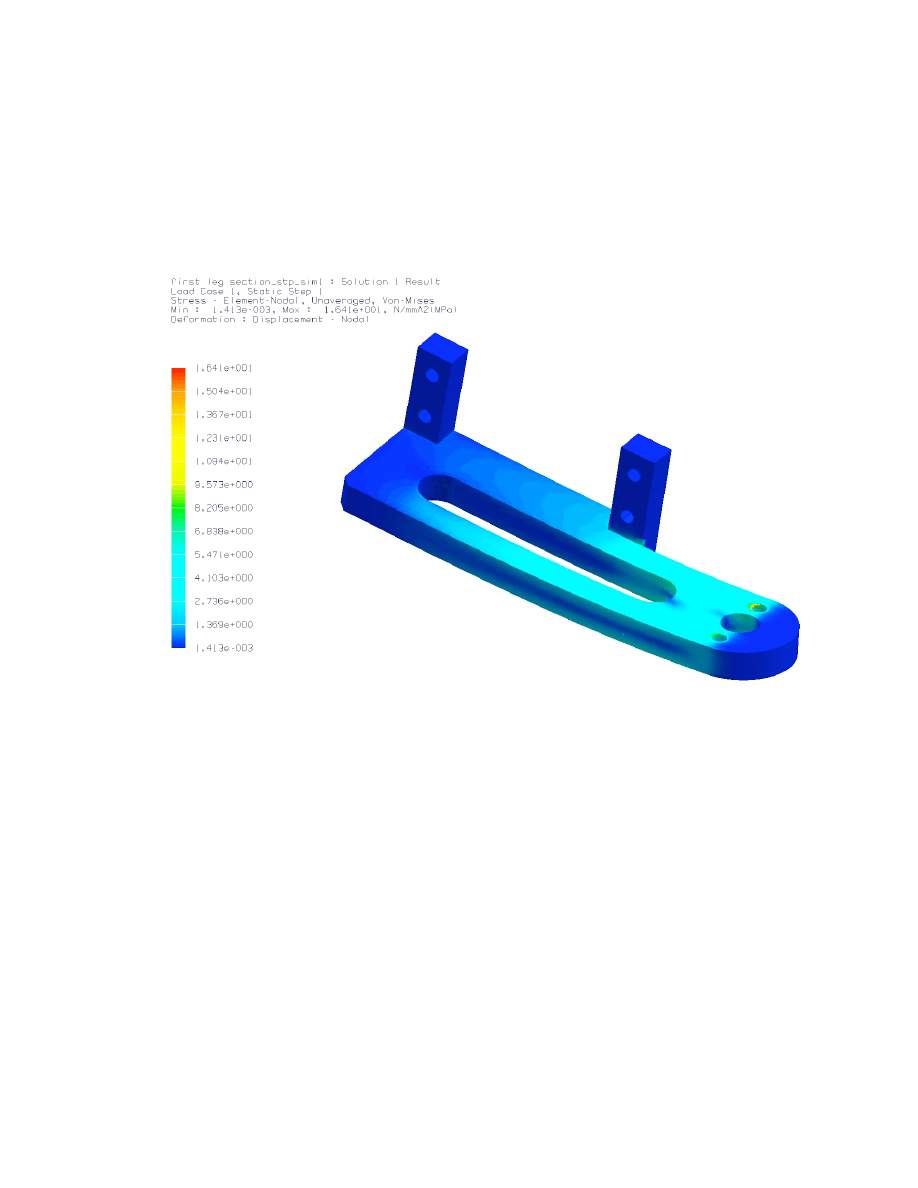
6.1.2 Results
After running the simulation, the Von‐Mises stress (
)
was plotted. This stress is the
equivalent stress and is used to compare for failure against the yield stress (
)
of the
material. In this case, failure is defined as
>
. As seen in Figure 13 below, the
Von‐Mises stress found through‐out most of the link is approximately 6MPa. This value
is much lower that the
of PVC which is 40 MPa.
20
It can also be seen that the stress peaks are around the mounting holes. The
is still
only 16.4 MPa. The team believes this value is much higher than would be seen on the
actual part since the model is stiffly constrained whereas the actual link is clamped and
slight motion is allowed. Even with a moderate to low accuracy, the results conclude the
part will not fail.
Figure 13: Von‐Mises Stress of the First Bar Linkage
6.2 Hexapod Motion Simulations
Simulation models are useful in refining the controlling schemes before applying them to
the real system. Simulations can also be used to check for design issues such as
interference within a model. The motions of the hexapod can be simulated in
programming software called Matlab. This is accomplished by using a combination of
Matlab’s specialized Simulink and Virtual reality toolbox add‐ons.
6.2.1 Simulink
Simulink is a system modeling interface tool that can read in inputs from Matlab,
perform analysis on the inputs if necessary, and output the results for graphing and
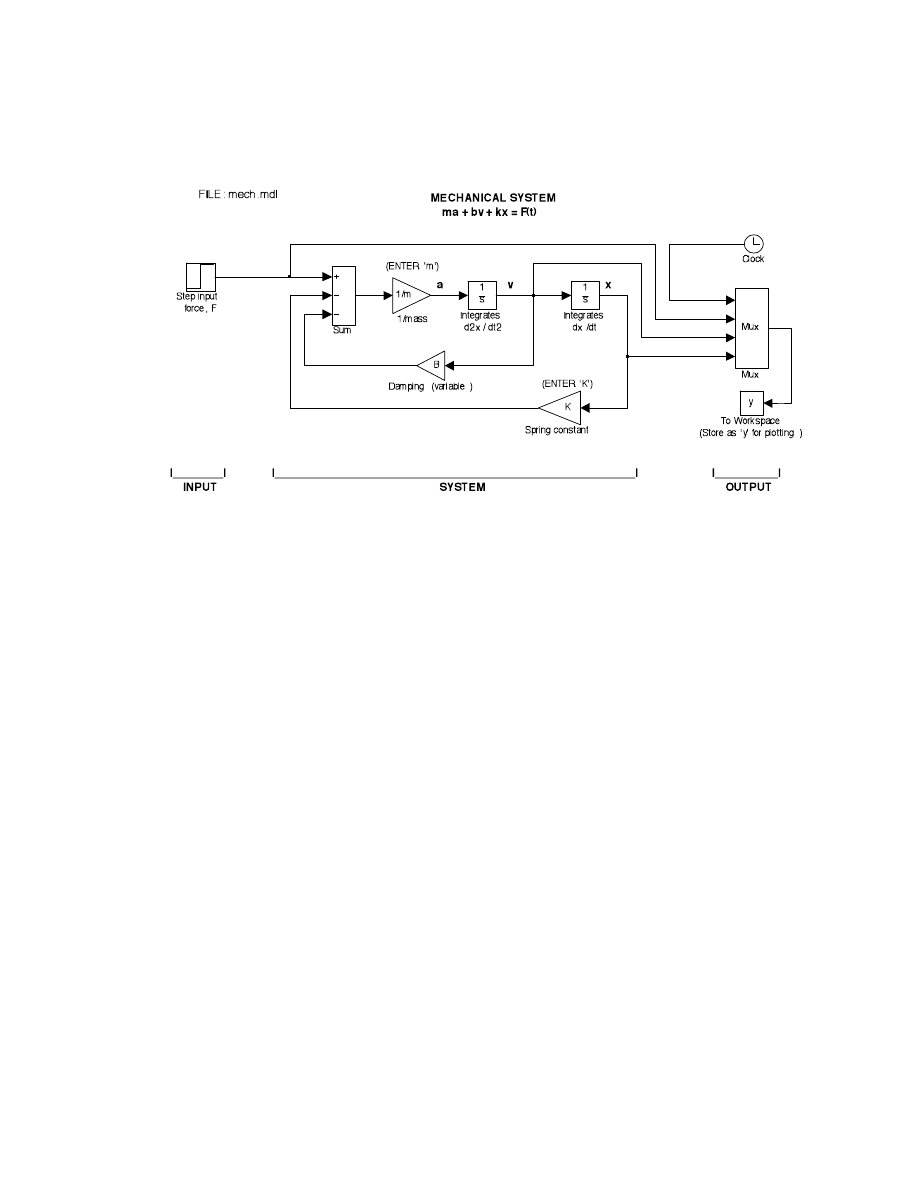
21
other uses such as simulations. Simulink uses a ‘block’ style structure in manipulating
data and performing calculations.
Figure 14: Block Diagram representation of a differential mechanical system
[Bauer, Robert; “MECH 3900: Assignment 1”; ‘Department of Mechanical Engineering Dalhousie University, Jan
15,2008]
Figure 14 shows a common block diagram representation of a system model defined in
Simulink.
In this block diagram the input data is provided by the Matlab driving routine.
Values for all the blocks can be provided by the Matlab code or can be initialized in the
Simulink blocks. The output data is combined into an array using the MUX block and is
then sent to the workspace. The workspace could be anything from a graph to the
original driving routine for further manipulation.
6.2.2 Virtual Reality Toolbox
Virtual Reality toolbox is a program that uses the position and angle data supplied by
Simulink to visually show the simulation of a model in the Virtual World. A solid works
model of the hexapod is inserted into the Virtual World and can be simulated using data
generated by Matlab. In the case of the hexapod robot simulation the input code into
Simulink will be a ‘driving routine’ gait motion code (Appendix D) which has been
written in Matlab. The Virtual Reality Toolbox sink block connects the output Simulink
data to the Virtual object (which is the hexapod legs for our case) located in the virtual
reality world.

22
6.3 Working Leg
A working prototype leg has been manufactured and tested as of November 26, 2008.
The single leg was built as a proof of concept. A finished leg is required to proceed on
hardware testing and to set the initial positions of each servo, thus creating a need for the
model.
6.3.1 Mechanical
With an existing solid works model, a rapid prototype version of the leg joints was found
to be the timeliest method of manufacturing the needed leg sections. The plastic
material used by Dalhousie’s rapid prototype machine was considered strong enough
for preliminary testing, as its material properties closely matched the final design
material. The three leg sections were prototyped and assembled using three Hi‐Tec
brand servos.
Some minor alterations from the original design came from assembly of the rapid
prototyped leg members. For reduction of weight, the first leg section would have a slot
cut through the center, as in the second leg section. To aid in assembly, all servo disk
mounting positions would have a through hole drilled to access the servo shaft spline
bolt that holds the mounting disk in place, making assembly and disassembly an easier
process.
6.3.2 Hardware
A power supply was procured to power the servos through a temporary power cable.
The 5V section of the supply was used to limit servo performance for initial testing. In
future testing a 9.6 volt supply will be used. The SD‐21 board logic section was
temporarily powered through a jumper from the servo supply side. However, in future
iterations the SD‐21 will be powered by the Arduino which is supplied by the USB port.
The Arduino and SD‐21’s I
2
C ports were connected.
6.3.3 Software
All values of speed, low and high bytes were calculated using initial versions of the
Matlab software included in the appendix. These positions were then manually entered
into arrays in the Arduino board, as serial communication is not yet fully debugged. As

23
will be used in the final version, three positions were entered to form a leg path, which
is followed on each run of the Arduino’s program, as seen in the appendix.
The leg’s performance is as expected and further testing will provide preliminary
performance numbers for speed and weight carrying capacity.
24
7 Project Status
7.1 Progress
The team has currently finalized its design selection. All drawings and specifications have
been completed along with some proof on concept work. This work includes the virtual
modeling of the leg kinematics and the building of a prototype leg.
The software is still currently being worked on and is showing promise. The IK program
has been successful in defining the correct angle changes to reposition the final two links
of the leg. The Matlab transmission program has also been able to give basic control to
the mock‐up leg in order to perform a single crude step.
The group also believes they have completed the appropriate amount of modeling and
testing to begin production of the six legs and body in order to have a fully assembled
model early in the second term. The improvement of the software will be continual until
the end of term to achieve the best results possible within the allotted timeframe.
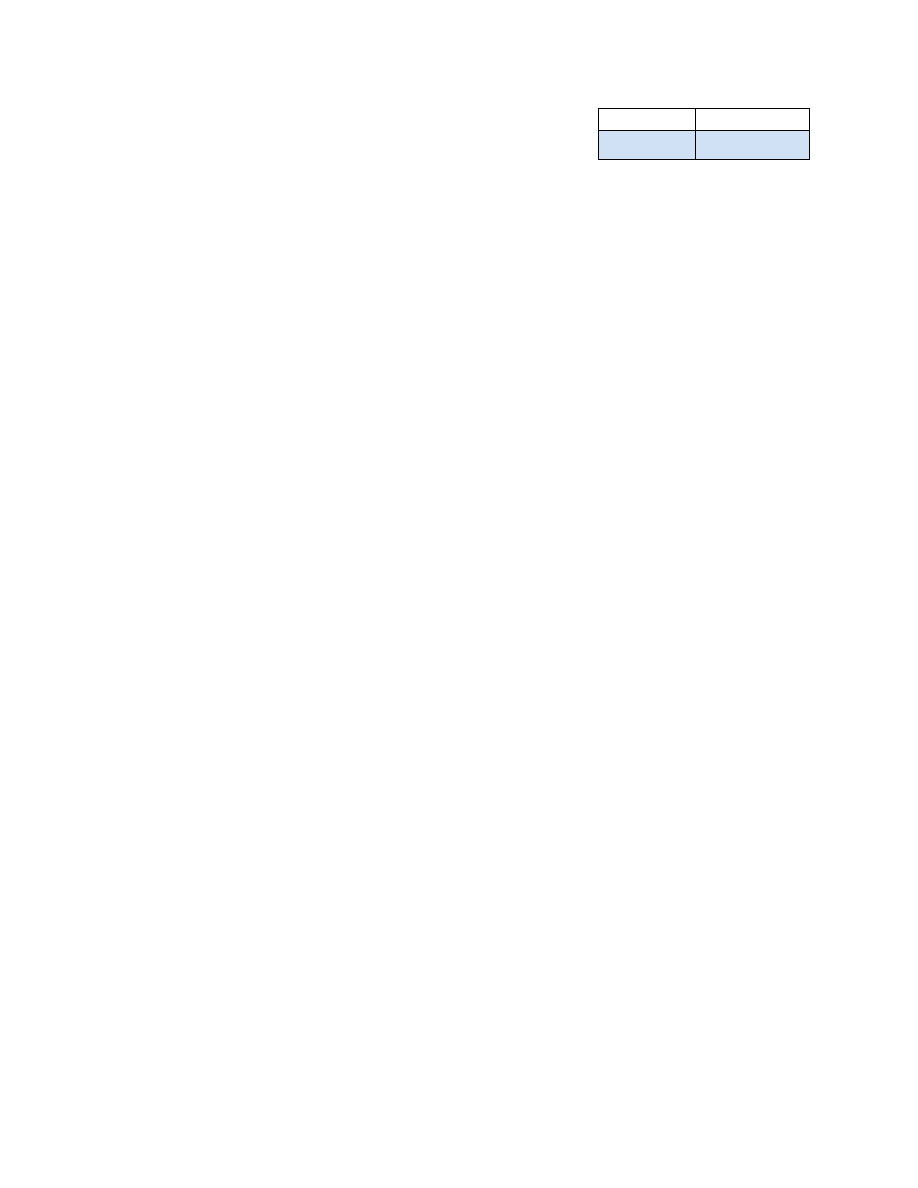
7.2 Technician Time
All fabrication work will be completed by the department. This is limited to the cutting
and machining of parts. This will ensure quality fabrication of components. An estimate of
the machining time required from the department for this project is provided in Table 3.
Table 3: Estimated Machining Time Required from Department
Part Number
Part Description
Quantity
Total MachiningTime
(hrs)
HX‐0012
Top Plate
1
1.5
HX‐0013
Bottom Plate
1
4
Total
5.5
25
All assembly work will be completed by the team. Assembly requires the use of simple hand
tools and bonding agents. Advice may be sought from the technicians during the assembly
process.
8 Budget
With
the
selected
design
being
finalized,
Team
#2
has
assembled
the
budget
found
in
Table
4.
To
date
we
have
secured
$1800
of
our
project
cost.
Table 4: Proposed Budget
Materials
Unit
cost
Amount
Cost
Electronics
HS‐645MG Servos
$39.02
21
$819.42
HS‐765HB
$43.78
1
$43.78
HS‐805BB
$43.36
1
$43.36
25' 22g black wire
$2.62
1
$2.62
25' 22g red wire
$2.62
1
$2.62
Netmedia 6" jumper Wire kit
$8.49
1
$8.49
Eneloc 30 pc. Reinforced Jumper wire kit
$18.91
1
$18.91
Pulse Width Modulator
$63.15
2
$126.30
USB Cable
$2.99
1
$2.99
Microcontroller
$40.64
1
$40.64
Resistors (500 ohm + 2000 ohm)
$1.00
2
$2.00
Potentiometer (500ohm)
$7.85
1
$7.85
Rocker Switch
$1.39
1
$1.39
Protoboard
$15.00
1
$15.00
Raw Materials
3/8" Hex Standoff 1/8"PL
$1.00
12
$12.00
1/4" ABS
$13.29
3
$39.87
1/2" ABS
$27.39
2
$54.78
1/8"Alluminum Plate 6061
$26.06
3
$78.18
Plastic Bonder
$24.99
1
$24.99
1‐1/4" AL Hex Standoff 10‐32 screw
$3.03
6
$18.18
Leg Bumper
$6.23
7
$42.00
Fastners
$20.00
1
$20.00
Rapid prototyping
$7.00
3
$21.00
Subtotal
$1,383.22
Tax (15%)
$207.48
26
Shipping
$100.00
Total
$1,690.70

27
9 Conclusion and Recommendations
Hexapod robot is a relatively inexpensive and capable machine. The servo arrangement allows
the robot to maneuver with relative ease in both planar directions. The three degrees of
freedom per leg also allows the ROV to adjust its height without affecting the other
performance characteristics. The large plate forming the top of the body allows for the
mounting of circuit boards and additional sensors improving the versatility of the robot.
Several design choices were evaluated before the final design was chosen. The main differences
between the alternative designs were the positioning and design of the six legs. Increasing the
complexity of the robot was investigated but not done due to the difficulty on building the
model and the extra complexity of the motion programming. One alternative design had the six
legs spread evenly along a hexagonal body shape. This improved the rotation capabilities of the
hexapod, but since the ROV would have no front or back end, each leg has to be programmed
individually even to perform the simple tripod gait. The team selected a ROV consisting of a
rectangular body and the six legs being spread equally along both sides. This maximized both
the maneuverability and programming simplicity.
Several tests were performed to ensure the legs had appropriate range of motion and strength
to support the hexapod. These test included a FEA analysis, a virtual simulation in MATLAB
SImulink and then the construction of a prototype leg. With the validation of our design, the
group is ready to begin fabrication of the entire hexapod ROV.

28
Appendix A: 2 DOF Inverse Kinematic MATLAB program
User
must
manually
input
the
initial
and
final
leg
position
along
with
the
body
height,
step
height,
and
number
of
points
along
the
parabola.
clc
clear
P1=[0.15 0.02; 0.16 0]
body_height=0.08;
step_heigth=0.03;
point_num=4;
steplength=sqrt((P1(2,1)-P1(1,1))^2+(P1(2,2)-P1(1,2))^2)
% Defining the polynomial
x=[0 steplength/2 steplength];
y=[0 step_heigth 0];
p=polyfit(x,y,2);
% Plotting the points
dx=steplength/point_num;
x2=0:dx:steplength;
y2=polyval(p,x2);
plot(x2,y2);
para_points=[x2 ;y2];
para_points=para_points'
step_angle=atan2((P1(2,2)-P1(1,2)), (P1(2,1)-P1(1,1)))
for
k=0:point_num
effector_pos(k+1,1)=P1(1,1)+para_points(k+1,1)*cos(step_angle);
effector_pos(k+1,2)=P1(1,2)+para_points(k+1,1)*sin(step_angle);
effector_pos(k+1,3)=para_points(k+1,2)-body_height;
end
effector_pos
L1=0.1; L2=0.06; L3=0.08;
num_points=size(effector_pos);
for
i=1:num_points(1)
% setup loop for multiple points
x=effector_pos(i,1);
y=effector_pos(i,2);
z=effector_pos(i,3);
angle(1)=atan2(y,x);
%Determining angles 2 and 3********************************************
Px=sqrt(x^2+y^2)-L1;
Py=z;
C2=(Px^2+Py^2-L2^2-L3^2)/(2*L3*L2);
S2=sqrt(1-C2^2);

29
angle(3)=atan2(S2,C2);
angle(2)=atan2(Py,Px)-atan2(L3*S2,L2+L3*C2);
%Ensuring a possible physical solution********************************
phi=atan2(Py,Px);
if
phi < 0; phi=phi+2*pi;
end
if
phi >= angle(2);
angle(2)=2*phi-angle(2);
angle(3)=-1*angle(3);
end
%ensures new angle is always between 0 and 360deg*********************
for
k=1:3
while
(angle(k)<0 || angle(k)>6.2832)
if
angle(k)<0
angle(k)=angle(k)+2*pi;
else
angle(k)=angle(k)-2*pi;
end
end
end
for
j=1:3
servo_angle(i,j)=angle(j);
end
end
servo_angle

30
Appendix B: Angles to Registry Format Converter Code
function
[bytes]
=
LowHigh(pos)
%LOWBYTE
HIGHBYTE
CONVERTER
test
=
pos/256;
i
=
0
;
while
(i<test)
i
=
i+1;
end
i=i‐1;
lowbyte
=
(pos
‐
(256*i));
highbyte
=
i
;
bytes
=
[lowbytehighbyte];
%*********************************************************************
function
[Register]
=
Register(Command,ServoMinimum,ServoMaximum)
%Register
Converter
A
=
size(Command);
Register
=
zeros(A(1),A(2)+1);
i=1;
j=1;
whilei<(A(1)+1)
while
j<(A(2))
Register
(i,j)
=
Command(i,j);
j=j+1;
end
B=LowHigh(Position(Command(i,j))+ServoMinimum);
C=LowHigh(ServoMaximum);
if
B(2)>=C(2)
if
B(1)>C(1)
B
=
C;
end
end
if
B(2)
>
C(2)
B=C;
end
Register(i,(j))=B(1);
Register(i,(j+1))=B(2);
i=i+1;j=1;
end
Register;

31
Appendix C: Winter Term Gantt Chart

32
Blank page where gantt chart will go

33
Appendix D: Simulink Gait
%This
is
a
program
for
simulating
a
walking
gait
for
the
hexapod
%equivalent)
theta1_span=
‐32;
%i.e
‐15
deg
to
+15
deg
for
a
30
deg
span
theta2_span=
‐15;
%
i.e
0
deg
to
+15
deg
for
a
15
deg
span
theta3_span=
‐10;
%i.e
0
deg
to
+15
deg
for
a
15
deg
span
tmax=10;
%time
to
complete
a
step
theta1_max=theta1_span*pi/180;
theta2_max=theta2_span*pi/180;
theta3_max=theta3_span*pi/180;
seq=8;
%
8
part
sequence
for
1
movement
i=1;
j=1;
k=1
%right
(R:1,4,5)
and
left
(L:2,3,6)
gait
walks
Rtheta1=[];
Rtheta2=[];
Rtheta3=[];
Ltheta1=[];
Ltheta2=[];
Ltheta3=[];
time
=
tmax/seq:tmax/seq:tmax;
%
time
corresponding
to
each
theta
for
1
cycle
cycle=20;
%
number
of
tmax
(i.e
walking
time)
total_time=tmax/seq:tmax/seq:cycle*tmax;
simtime=cycle*tmax;
%
assigning
theta
values
for
each
sequence
while
k<=cycle;
i=1;
whilei<=seq;
Rtheta1(j)=(theta1_max/2)*sin(2*pi*time(i)/tmax);
Ltheta1(j)=‐Rtheta1(j);
ifi==1|i==7|i==8;
Rtheta2(j)=theta2_max;
Rtheta3(j)=theta3_max;
Ltheta2(j)=0;
Ltheta3(j)=0;
else
ifi==3|i==5|i==4;
Rtheta2(j)=0;

34
Rtheta3(j)=0;
Ltheta2(j)=theta2_max;
Ltheta3(j)=theta3_max;
else
Rtheta2(j)=0;
Rtheta3(j)=0;
Ltheta2(j)=0;
Ltheta3(j)=0;
end
end
i=i+1;
j=j+1;
end
k=k+1;
end
sim('gait1',simtime);
35
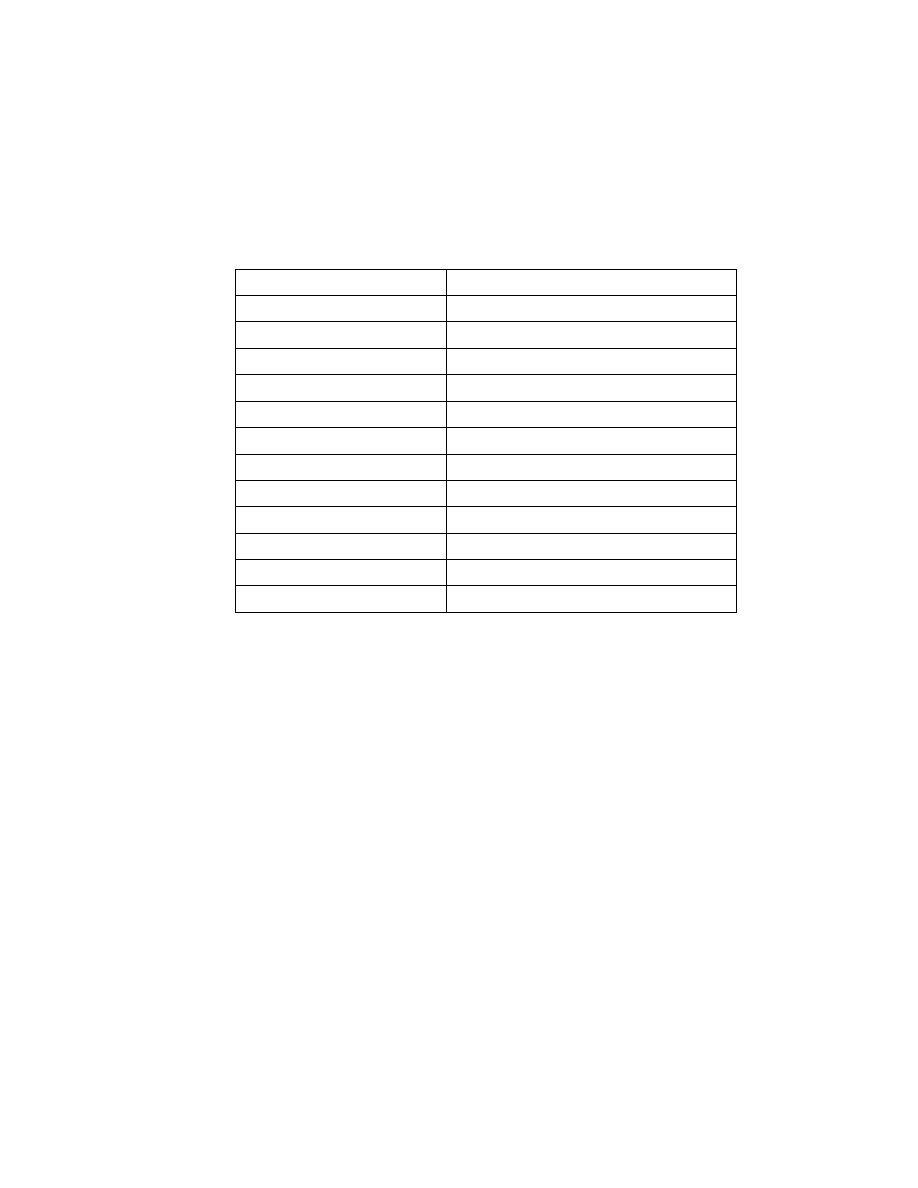
Appendix E: Fabrication Drawings
Drawing Number
Description
HX‐0001
GENERAL ASSEMBLY
HX‐0010
FRAME ASSEMBLY
HX‐0012
TOP PLATE
HX‐0013
BOTTOM PLATE
HX‐0020
LEFT LEG ASSEMBLY
HX‐0022
FIRST LEG SECTION (LEFT)
HX‐0023
SECOND LEG SECTION
HX‐0024
THIRD LEG SECTION
HX‐0025
FIRST LEG SECTION – PART A
HX‐0026
FIRST LEG SECTION – PART B
HX‐0030
RIGHT LEG ASSEMBLY
HX‐0032
FIRST LEG SECTION (RIGHT)
Wyszukiwarka
Podobne podstrony:
AlternativeFuelsForCementIndustry alf cemind final publishable report
POLISH FINAL RESEARCH REPORT WEB
Raport FOCP Fractions Report Fractions Final
offshore accident analysis draft final report dec 2012 rev6 online new
Final Report Brief
offshore accident analysis draft final report dec 2012 rev6 online
evaluation of fabs final report execsum
Raport FOCP Fractions Report Fractions Final
Pew Global Attitudes Project Russia Report FINAL September 3 20131
final speed kansas report
Ball Lightning Study Final Report by Eric W Davis (2003) AFD 091008 049
Architecting Presetation Final Release ppt
Opracowanie FINAL miniaturka id Nieznany
PNADD523 USAID SARi Report id 3 Nieznany
Art & Intentions (final seminar paper) Lo
O'Reilly How To Build A FreeBSD STABLE Firewall With IPFILTER From The O'Reilly Anthology
Ludzie najsłabsi i najbardziej potrzebujący w życiu społeczeństwa, Konferencje, audycje, reportaże,
więcej podobnych podstron