„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Danuta Pawełczyk
Pisanie i uruchamianie programów w asemblerze
311[07].Z4.01
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2006

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
Recenzenci:
mgr inż. Elżbieta Małgorzata Majka
mgr inż. Anna Kembłowska
Opracowanie redakcyjne:
mgr inż. Danuta Pawełczyk
Konsultacja:
mgr inż. Gabriela Poloczek
Korekta:
mgr inż. Urszula Ran
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 311[07].Z4.01
„Pisanie i uruchamianie programów w asemblerze” zawartego w modułowym programie
nauczania dla zawodu technik elektronik.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2006

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
6
3. Cele kształcenia
7
4. Materiał nauczania
8
4.1. System mikroprocesorowy
8
4.1.1. Materiał nauczania
8
4.1.2. Pytania sprawdzające 12
4.1.3. Ćwiczenia 12
4.1.4. Sprawdzian postępów 14
4.2. Komunikacja mikroprocesora z otoczeniem
15
4.2.1. Materiał nauczania
15
4.2.2. Pytania sprawdzające 17
4.2.3. Ćwiczenia 17
4.2.4. Sprawdzian postępów 19
4.3. Mikrokontrolery rodziny ‘51
20
4.3.1. Materiał nauczania
20
4.3.2. Pytania sprawdzające 25
4.3.3. Ćwiczenia 25
4.3.4. Sprawdzian postępów 26
4.4 Programowanie mikrokontrolera w języku asemblera
27
4.4.1. Materiał nauczania
27
4.4.2. Pytania sprawdzające 34
4.4.3. Ćwiczenia 34
4.4.4. Sprawdzian postępów 36
5. Sprawdzian osiągnięć
37
6. Literatura
43

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy z zakresu pisania i uruchamiania
programów w języku asemblera.
W poradniku zamieszczono:
− wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć już ukształtowane, abyś
bez problemów mógł korzystać z poradnika,
− cele kształcenia – wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
− materiał nauczania – podstawowe wiadomości teoretyczne niezbędne do opanowania treści
jednostki modułowej,
− zestaw pytań przydatny do sprawdzenia, czy już opanowałeś podane treści,
− ćwiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
− sprawdzian postępów,
− literaturę uzupełniającą,
− sprawdzian osiągnięć – przykładowy zestaw zadań. Pozytywny wynik sprawdzianu
potwierdzi, że dobrze pracowałeś podczas zajęć i nabyłeś wiedzę i umiejętności z zakresu
tej jednostki modułowej.
W materiale nauczania zostały omówione zagadnienia z zakresu budowy
mikroprocesorów, sposobu ich programowania w języku asemblera oraz kompilowania
i uruchamiania napisanych programów. Przy poznawaniu budowy mikroprocesora, listy
rozkazów, sposobu programowania i uruchamiania programów niewątpliwie pomocny będzie
nauczyciel, który pomoże Ci w przypadku pojawienia się problemów.
Z rozdziałem „Pytania sprawdzające” możesz zapoznać się:
−
przed przystąpieniem do rozdziału „Materiał nauczania” – poznając przy tym wymagania
wynikające z zawodu, a po przyswojeniu wskazanych treści, odpowiadając
na te pytania sprawdzisz stan swojej gotowości do wykonywania ćwiczeń,
−
po opanowaniu rozdziału „Materiał nauczania”, by sprawdzić stan swojej wiedzy, która
będzie Ci potrzebna do wykonywania ćwiczeń.
Kolejny etap to wykonywanie ćwiczeń, których celem jest uzupełnienie i utrwalenie
wiadomości z zakresu programowania mikroprocesorów.
Wykonując ćwiczenia przedstawione w poradniku lub zaproponowane przez nauczyciela,
będziesz poznawał budowę mikroprocesora na przykładzie mikrokontrolera rodziny ‘51, jego
listę rozkazów, sposób programowania oraz kompilowania, debbugowania i uruchamiania
programów w języku asemblera.
Po wykonaniu zaplanowanych ćwiczeń, sprawdź poziom swoich postępów wykonując
„Sprawdzian postępów”.
W tym celu:
− przeczytaj pytania i odpowiedz na nie,
− podaj odpowiedź wstawiając X w podane miejsce,
− wpisz Tak, jeśli Twoja odpowiedź na pytanie jest poprawna,
− wpisz Nie, jeśli Twoja odpowiedź na pytanie jest niepoprawna.
Odpowiedzi Nie wskazują luki w Twojej wiedzy, informują Cię również, jakich
zagadnień jeszcze dobrze nie poznałeś. Oznacza to także powrót do treści, które nie są
dostatecznie opanowane.
Poznanie przez Ciebie wszystkich lub określonej części wiadomości będzie stanowiło
dla nauczyciela podstawę przeprowadzenia sprawdzianu poziomu przyswojonych wiadomości

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
i ukształtowanych umiejętności. W tym celu nauczyciel może posłużyć się zadaniami
testowymi.
W poradniku jest zamieszczony sprawdzian osiągnięć, który zawiera przykład takiego
testu oraz:
− instrukcję, w której omówiono tok postępowania podczas przeprowadzania sprawdzianu,
− przykładową kartę odpowiedzi, w której w przeznaczonych miejscach wpisz odpowiedzi
na zadania lub zakreśl właściwe odpowiedzi spośród zaproponowanych.
Jednostka modułowa: „Pisanie i uruchamianie programów w języku asemblera”, której
treści teraz poznasz jest jednym z modułów koniecznych do zapoznania się z badaniem
układów mikroprocesorowych – schemat 1.
Bezpieczeństwo i higiena pracy
W czasie pobytu w pracowni musisz przestrzegać regulaminów, przepisów bhp i higieny
pracy oraz instrukcji przeciwpożarowych, wynikających z rodzaju wykonywanych prac.
Przepisy te poznasz podczas trwania nauki.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
Schemat układu jednostek modułowych w module 311[07].Z4 „Badanie układów mikroprocesorowych”.
311[07].Z4
Badanie układów
mikroprocesorowych
311[07].Z4.01
Pisanie i uruchamianie programów
w asemblerze
311[07].Z4.02
Badanie modułów wewnętrznych
mikrokontrolera
311[07].Z4.03
Badanie układów zewnętrznych
mikrokontrolera

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej „Pisanie i uruchamianie
programów w asemblerze ” powinieneś umieć:
− opracowywać algorytm programu i zapisywać go w postaci schematu blokowego,
− konwertować liczby z systemu dziesiętnego na binarny i ósemkowy oraz z binarnego
i szesnastkowego na dziesiętny,
− wykonywać działania arytmetyczne (dodawanie i odejmowanie) i logiczne (suma, iloczyn,
suma modulo 2, negacja) na liczbach binarnych,
− znać budowę i działanie podstawowych układów cyfrowych,
− korzystać z różnych źródeł informacji.

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
− rozpoznać poszczególne bloki systemu mikroprocesorowego na podstawie schematu
blokowego,
− podłączyć różne rodzaje pamięci półprzewodnikowych w systemie,
− scharakteryzować rolę układów wejścia/wyjścia, sposób podłączeń do systemu układów
izolowanych i współadresowalnych z pamięcią,
− scharakteryzować rolę wybranych rejestrów,
− scharakteryzować operacje wejścia/wyjścia, sposób realizacji (przerwania, bezpośredni
dostęp do pamięci – DMA) oraz pojęcie priorytetu i poziomu przerwań,
− scharakteryzować podstawowe zasoby mikrokontrolera (porty, pamięć programu, pamięć
danych i SFR oraz sposoby sterowania poborem mocy),
− podłączyć zewnętrzną pamięć danych i pamięć programu do mikrokontrolera,
− odczytać dane binarne z wybranego portu,
− zapisać i przejrzeć zawartości rejestrów w mikrokontrolerze,
− zinterpretować wykresy czasowe obrazujące realizację wybranych typów rozkazów
mikrokontrolera,
− skorzystać z listy rozkazów mikrokontrolera,
− obsłużyć mikroprocesorowy system uruchomieniowy,
− napisać w edytorze, zasemblować i uruchomić programy w trybie krokowym
i ciągłym,
− utworzyć i wywołać podprogramy,
− wykorzystać gotowe procedury obsługi wyświetlacza i klawiatury zawarte w pamięci
ROM,
− zastosować wybrane dyrektywy asemblera do nadawania symbolom wartości,
− zastosować wybrane dyrektywy asemblera przy pisaniu i łączeniu modułów programów,
− obsłużyć linker,
− zastosować istniejące programy jako podprogramy we własnym programie głównym
(zmiana pliku absolutnego na relokowalny, dodanie instrukcji RET), stworzyć
makroinstrukcje i posłużyć się nimi,
− stworzyć algorytmy programów z uwzględnieniem rozgałęzień i pętli programowych,
− napisać programy przemieszczające bloki informacji pomiędzy poszczególnymi rodzajami
pamięci,
− zastosować podprogramy oraz wykorzystać metody ich tworzenia (ochrona zawartości
rejestrów, przekazywanie danych pomiędzy programem głównym i podprogramem),
− napisać programy wykorzystujące algorytmy mnożenia i dzielenia liczb binarnych bez
znaku oraz wykorzystujące rozkazy arytmetyczne dostępne dla nowoczesnych
mikrokontrolerów jednoukładowych,
− zastosować algorytmy dodawania, odejmowania, mnożenia i dzielenia wielobajtowych
liczb binarnych.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
4. MATERIAŁ NAUCZANIA
4.1. System mikroprocesorowy
4.1.1. Materiał nauczania
Systemy mikroprocesorowe służą do przetwarzania informacji. Przetwarzanie
informacji polega na dostarczeniu do systemu danych, które poddawane są określonym
działaniom dając wyniki. Wynikami mogą być sygnały sterujące pracą maszyn, obrazy, teksty
itp. Jedną z ważniejszych części tego systemu jest procesor, który przetwarza informacje,
wykonując na niej elementarne operacje zwane instrukcjami (bądź rozkazami). Ciąg takich
instrukcji realizujący konkretne zadanie przetwarzania informacji nazywamy programem.
Tak więc do systemu mikroprocesorowego musimy dostarczyć dane wejściowe, program
lub zestaw programów, aby po przetworzeniu otrzymać wynik.
Rys. 1. System mikroprocesorowy
Typowy system mikroprocesorowy składa się z następujących części:
− mikroprocesora
− pamięci danych RAM
− pamięci programu ROM
− układów wejścia/wyjścia
− układów sterujących przepływem informacji między tymi elementami: magistrali danych,
magistrali adresowej i sygnałów sterujących.
system
mikroprocesorowy
dane
pr
og
ra
m
wyniki
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
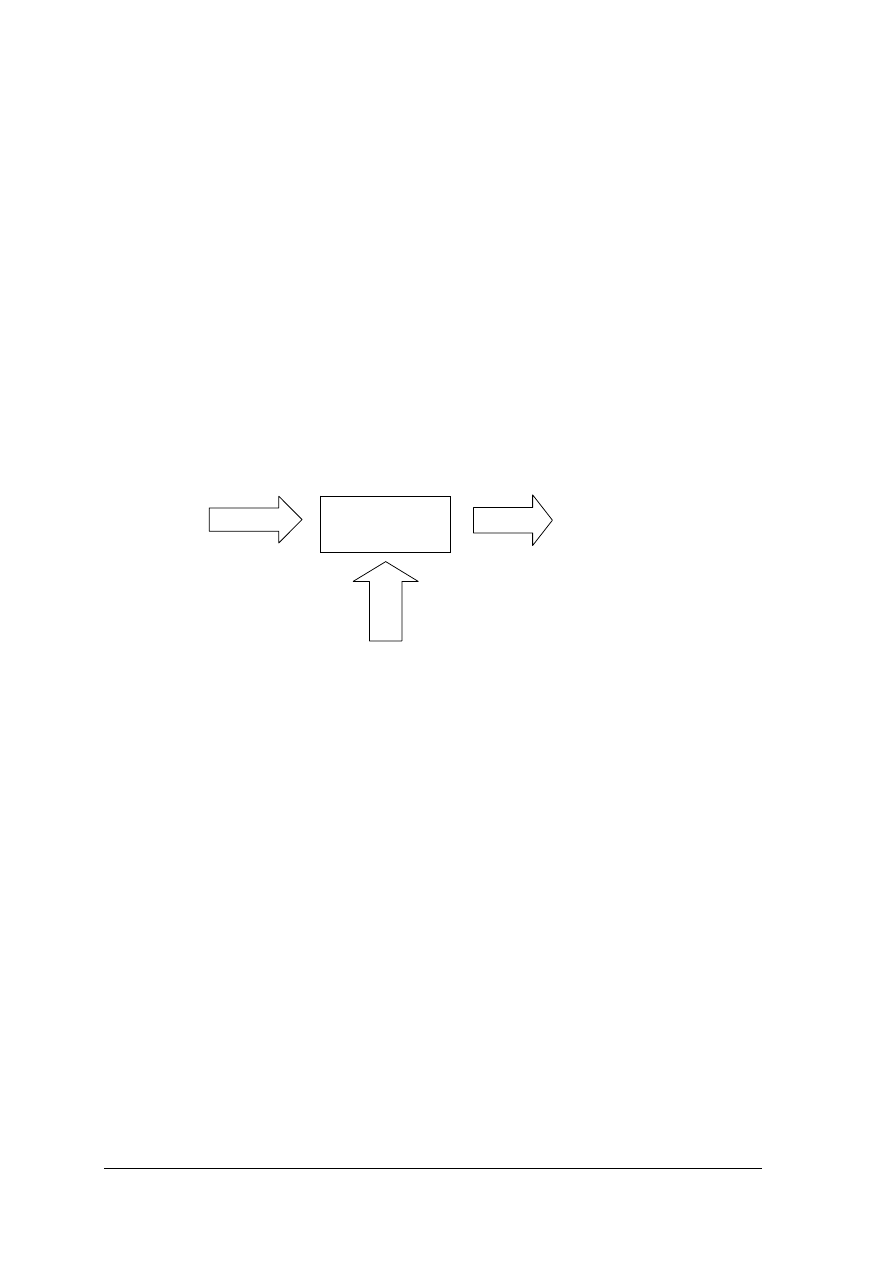
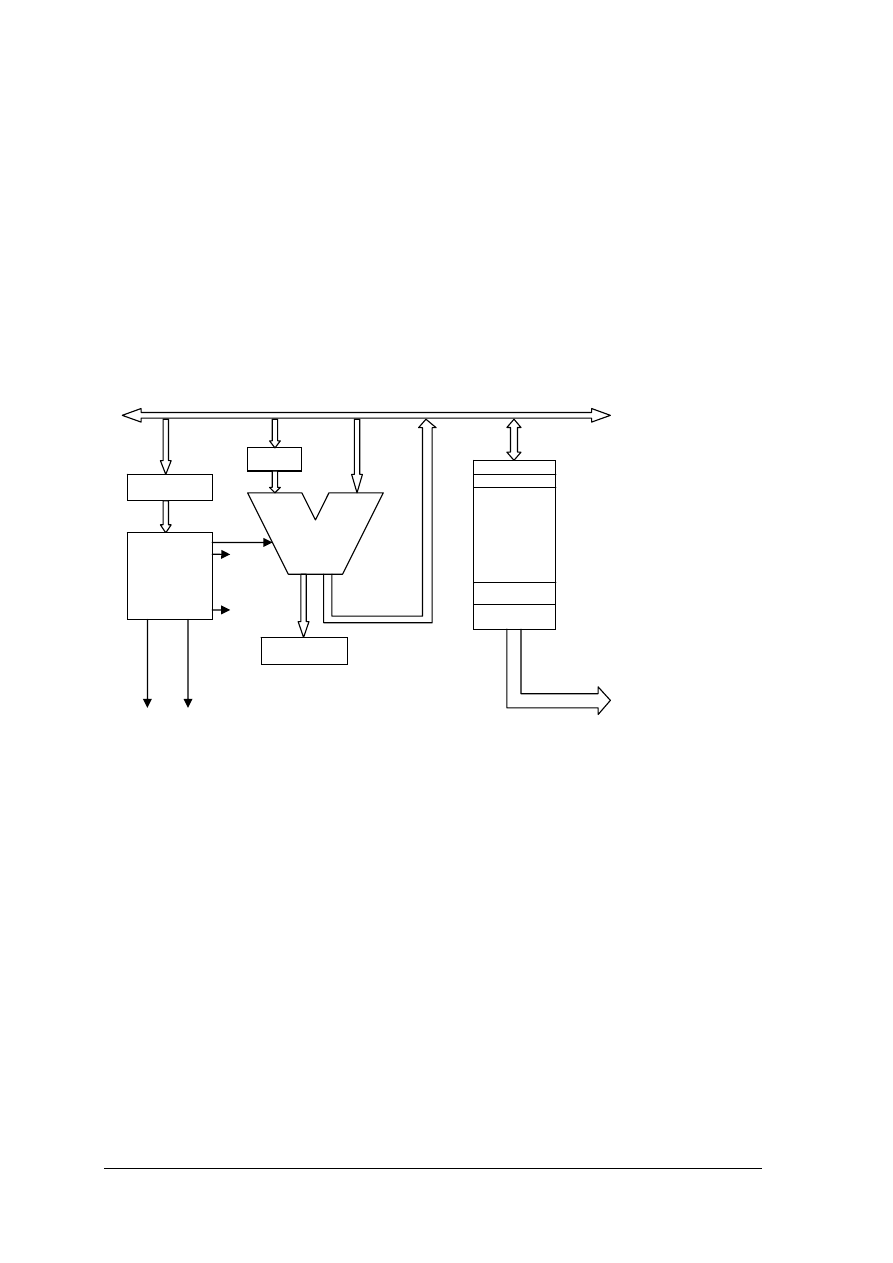
Schemat blokowy systemu mikroprocesorowego opartego na architekturze von Neumana:
Rys. 2. Schemat systemu mikroprocesorowego
Mikroprocesor pełniący funkcję jednostki centralnej umożliwia wykonywanie operacji
przetwarzania danych poprzez realizację programu zapisanego w pamięci programu.
Mikroprocesor składa się z dwóch układów: układu sterowania oraz jednostki
arytmetyczno-logicznej wraz z rejestrami roboczymi.
Zadaniem układu sterowania jest pobieranie rozkazów z pamięci programu, dekodowanie ich
oraz wystawianie odpowiednich sygnałów sterujących (wewnętrznych i zewnętrznych) w celu
wykonania rozkazów.
Jednostka arytmetyczno-logiczna służy do wykonywania operacji arytmetycznych
lub logicznych na liczbach binarnych. Jednostka arytmetyczno logiczna zawiera również
rejestr wskaźników (flagowy), w którym ustawiane są znaczniki wyniku wykonanej operacji
(np. flaga znaku, zera, przeniesienia).
Pamięć programu – pamięć nieulotna, przechowuje program w języku maszynowym.
Najczęściej jest wykonywana jako pamięć typu:
−ROM – programowana przez producenta
−PROM – programowana jednorazowo przez użytkownika
−EPROM, EEPROM – do wielokrotnego programowania przez użytkownika
Pamięć danych – pamięć typu odczyt/zapis, służy do przechowywania danych podczas
realizacji programu.
Układy wejścia/wyjścia – umożliwiają prawidłową komunikację między
mikroprocesorem a otoczeniem – urządzeniami zewnętrznymi. Zadaniem układów
wejścia/wyjścia jest zapewnienie odpowiedniej postaci danej (np. zamiana z postaci
szeregowej na równoległą i odwrotnie) oraz dopasowanie czasowe wymiany danej
(np. zapamiętanie danej do czasu, kiedy odbierze ją urządzenie zewnętrzne).
Magistrala danych – zespół linii, którymi przesyłane są liczby binarne (dane, kody
rozkazów, słowa sterujące i statusowe).
magistrala adresowa
mikro-
procesor
pamięć
danych
pamięć
programu
układy
we–wy
magistrala danych
magistrala sterująca
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Magistrala adresowa – zespół linii, którymi procesor adresuje poszczególne komórki
pamięci programu, danych lub rejestry układów wejścia/wyjścia.
Magistrala sterująca – zespół linii, którymi wymieniane są sygnały sterujące.
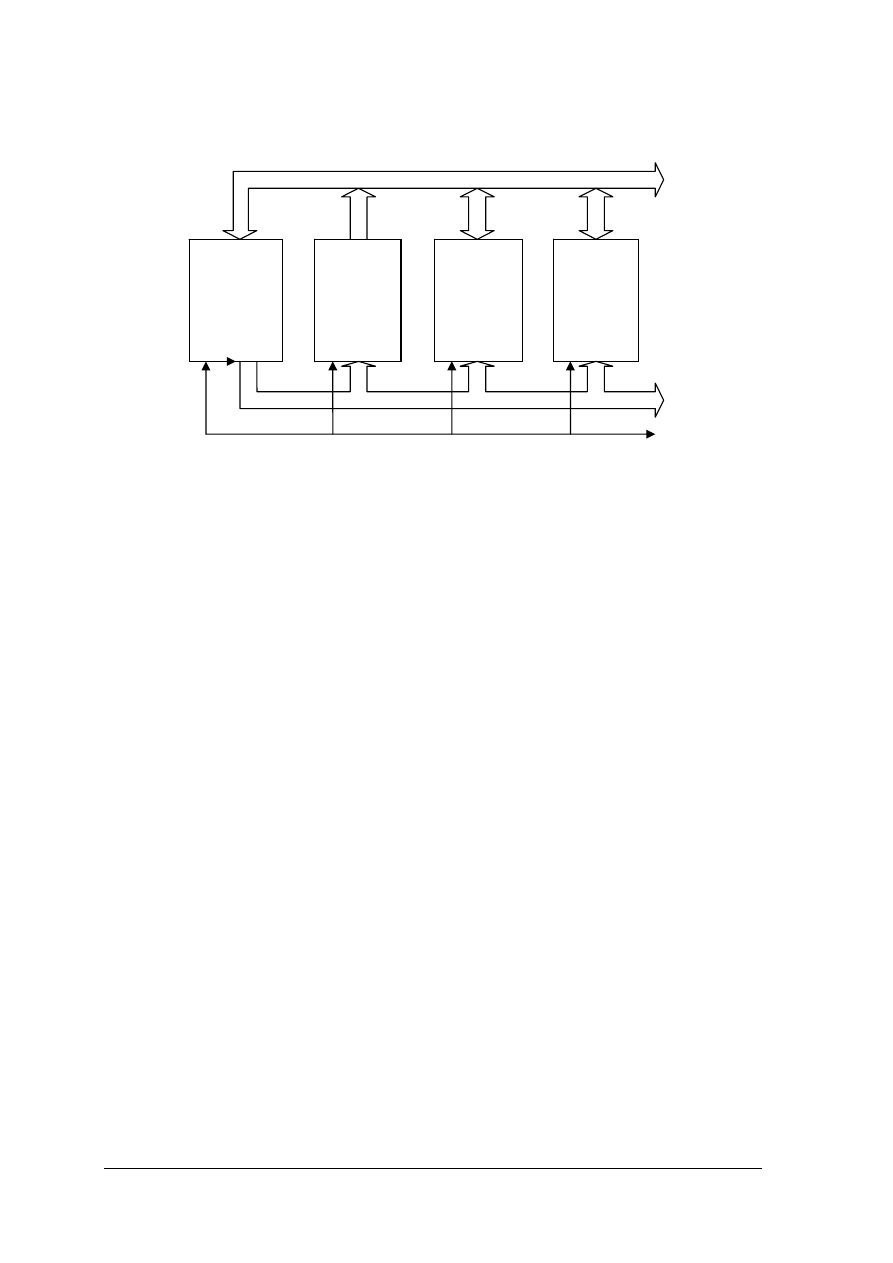
Mikroprocesor zawiera następujące podzespoły:
− jednostkę arytmetyczno–logiczną ALU (arithmetic and logic unit),
− akumulator A (accumulator),
− licznik rozkazów PC (program counter),
− zestaw rejestrów roboczych R
i
(general purpose register),
− rejestr rozkazów IR (instruction register),
− wskaźnik stosu SP (stack pointer),
− układ sterowania CU (control unit).
Rys. 3. Schemat blokowy mikroprocesora
Jednostka arytmetyczno–logiczna (ALU) wykonuje podstawowe działania logiczne
i arytmetyczne na słowach takich jak suma logiczna, iloczyn logiczny, suma modulo 2,
negacja, dodawanie i odejmowanie arytmetyczne, porównywanie, rotacja. Wykonanie
operacji arytmetycznej lub logicznej powoduje ustawienie znaczników (flag) w rejestrze
wskaźników. Najczęściej stosowane flagi to:
− przeniesienia CY (przyjmuje wartość 1 jeżeli wystąpiło przeniesienie z najbardziej
znaczącej pozycji),
− przeniesienia połówkowego AC (przyjmuje wartość 1 jeżeli wystąpiło przeniesienie z bitu
3 na 4 – wykorzystywany w operacjach na liczbach BCD),
− zera Z (przyjmuje wartość 1 jeżeli wynik operacji jest równy 0),
− znaku S (przyjmuje wartość 1 jeżeli wynik operacji jest ujemny),
− parzystości P (przyjmuje wartość 1 jeżeli liczba jedynek w wyniku operacji jest
nieparzysta).
Akumulator – rejestr związany z jednostką arytmetyczną – z akumulatora jest domyślnie
pobierany jeden z argumentów operacji dwuargumentowej, w akumulatorze jest umieszczany
wynik operacji. Akumulator jest również wykorzystywany podczas komunikacji
z urządzeniami zewnętrznymi.
MAGISTRALA
STERUJĄCA
MAG. ADRESOWA
MAGISTRALA DANYCH
A
ALU
REJ. FLAG.
REJESTRY
ROBOCZE
SP
PC
IR
CU
SYGN
STER.

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
Rejestry robocze mogą pełnić różną role, w zależności od realizowanego rozkazu. Mogą
służyć do przechowywania danych lub adresów. Na rejestrach można wykonywać niektóre
operacje wynikające z listy rozkazów.
Licznik rozkazów PC służy do adresowania pamięci programu tzn. przechowuje adres
komórki pamięci, z której należy pobrać kod następnego rozkazu. W czasie realizacji
programu licznik zwiększa swoją zawartość po pobraniu każdego rozkazu lub jest do niego
wpisywana wartość (np. adres skoku).
Rejestr rozkazów IR służy do przechowywania pobranego z pamięci programu kodu
rozkazu.
Układ sterowania CU dekoduje zawartość rejestru rozkazów i generuje sygnały
sterujące zapewniające realizację pobranego rozkazu.
Wskaźnik stosu SP służy do adresowania wydzielonego obszaru pamięci danych,
w którym zapisywane są adresy i dane zgodnie z regułą LIFO (last in first out) tzn. kolejność
odczytu słowa jest odwrotna do kolejności ich zapisywania. Tak jest zorganizowana
programowa realizacja stosu, niektóre mikroprocesory posiadają stos sprzętowy. Stos
i wskaźnik stosu umożliwiają przejście do podprogramu, a po jego zakończeniu powrót do
programu głównego.
Mikroprocesory są układami sekwencyjnymi synchronicznymi, dlatego też z układem
sterowania musi współpracować generator impulsów zegarowych.
Rozkazy są realizowane w cyklach rozkazowych. Każdy cykl maszynowy składa się
z cykli maszynowych. Cykl maszynowy to część cyklu rozkazowego związana z odwołaniem
się (w celu odczytu lub zapisu) do pamięci lub układu wejścia/wyjścia. Cykl maszynowy
składa się z określonej liczby taktów zegarowych.
Każdy cykl rozkazowy można podzielić na dwie fazy:
− faza pobrania rozkazu z pamięci programu,
− faza wykonania rozkazu, która ma inny przebieg dla każdego rozkazu.
Faza pobrania rozkazu jest jednakowa dla wszystkich rozkazów. Polega na pobraniu
kodu rozkazu z pamięci programu, z komórki której adres wskazuje zawartość licznika
rozkazów PC. Kod pobranego rozkazu jest umieszczany w rejestrze rozkazów IR, licznik
rozkazów zostaje zwiększony, tak aby wskazywał następny rozkaz.
Faza wykonania rozkazu ma różny przebieg, rozpoczyna się w chwili umieszczenia
rozkazu w rejestrze rozkazów IR. Układ sterowania CU na podstawie zdekodowanego stanu
rejestru generuje odpowiednią sekwencję sygnałów sterujących zapewniających prawidłową
realizację rozkazu.
Podczas realizacji programu argumenty mogą być pobierane/zapisywane z/do rejestrów
roboczych, pamięci danych, pamięci programu (tylko odczytywane) lub układów
wejścia/wyjścia. Decyduje o tym użyty sposób adresacji. W mikroprocesorach stosowane są:
− adresacja natychmiastowa – rozkaz zawiera kod rozkazu i argument (tzn. argument jest
przechowywany wraz z kodem rozkazu w pamięci programu)
− adresacja bezpośrednia – rozkaz zawiera kod rozkazu i adres argumentu w pamięci danych
− adresacja rejestrowa – rozkaz zawiera kod rozkazu i nazwę rejestru, w którym
przechowywany jest argument
− adresacja rejestrowa pośrednia – rozkaz zawiera kod rozkazu i nazwę rejestru,
w którym przechowywany jest adres argumentu w pamięci danych.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Z jakich elementów składa się system mikroprocesorowy?
2. Jakie jest przeznaczenie poszczególnych bloków?
3. Z jakich podzespołów składa się mikroprocesor?
4. Do czego służy akumulator?
5. Jakie jest przeznaczenie rejestrów roboczych?
6. Co to jest stos i do czego służy?
7. W jaki sposób jest adresowany stos?
8. Co to jest cykl rozkazowy, cykl maszynowy, takt zegarowy?
9. W jakich fazach odbywa się cykl rozkazowy?
10. Do czego służy licznik rozkazów, kiedy zmieniana jest jego zawartość?
11. Co to jest rejestr flagowy (wskaźników), co oznaczają poszczególne flagi?
12. Jakie są metody adresacji stosowane w mikrokontrolerach?
4.1.3. Ćwiczenia
Ćwiczenie 1
Połącz elementy z lewej strony z ich opisem po prawej stronie. Przeanalizuj zadanie
dla mikroprocesora ośmiobitowego (8–bitowa magistrala danych) z 16 bitową magistralą
adresową.
akumulator
16– bitowy rejestr adresowy pamięci
programu
rejestr roboczy
8–bitowa magistrala dwukierunkowa
licznik rozkazów
wydzielony
fragment
pamięci danych
magistrala danych
8– bitowa magistrala jednokierunkowa
wskaźnik stosu
8– bitowy rejestr, w którym umieszczany jest
wynik operacji arytmetyczno-logicznej
adresacja natychmiastowa
8– bitowy rejestr ogólnego przeznaczenia
stos
argument rozkazu jest pobierany z pamięci
danych
magistrala adresowa
argument rozkazu jest pobierany z pamięci
programu
adresacja rejestrowa
pośrednia
16– bitowy rejestr adresowy pamięci danych
16– bitowa jednokierunkowa magistrala
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) przeanalizować podane informacje,
2) dopasować opisy do odpowiednich elementów systemu mikroprocesorowego
lub metod adresacji (jeden opis pozostanie niewykorzystany),
3) zaprezentować wykonane ćwiczenie,
4) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
− treść zadania dla każdego ucznia,
− zeszyt przedmiotowy,
− literatura z rozdziału 6.
Ćwiczenie 2
W jednostce arytmetyczno logicznej odbywają się wymienione operacje. Uzupełnij
tabelę, określając jaki będzie 8–bitowy wynik działania (binarnie), czyli zawartość
akumulatora po wykonaniu operacji oraz jakie będą flagi po ich wykonaniu: wpisz 0– jeżeli
flaga będzie zerowana, 1– jeśli będzie ustawiana lub x – jeśli wykonanie operacji nie wpływa
na flagę. Dane w tabeli są dziesiętne, pamiętaj, że jednostka arytmetyczno-logiczna wykonuje
operacje na danych binarnych, musisz więc dokonać konwersji:
operacja
wynik operacji w akumulatorze
C
Z
P
135+100
167+200
115
⊕
115
120
∧ 100
15
∧ 240
255 ∨ 15
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) dokonać konwersji danych dziesiętnych na binarne,
2) wykonać podane działania,
3) na podstawie uzyskanych wyników uzupełnić tabelę,
4) zaprezentować wykonane ćwiczenie,
5) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
− treść zadania dla każdego ucznia,
− zeszyt przedmiotowy,
− literatura z rozdziału 6.

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) rozpoznać poszczególne elementy systemu mikroprocesorowego
na podstawie schematu blokowego?
2) opisać rolę elementów systemu mikroprocesorowego?
3) wymienić podzespoły mikroprocesora i podać ich funkcję?
4) wyjaśnić pojęcia cykl rozkazowy, cykl maszynowy, takt zegarowy?
5) wyjaśnić z jakich faz składa się cykl rozkazowy?
6) opisać
metody
adresacji?
7) przyporządkować metodę adresacji do lokalizacji argumentu?
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
4.2. Komunikacja mikroprocesora z otoczeniem
4.2.1. Materiał nauczania
Zastosowanie systemu mikroprocesorowego do realizacji konkretnych zadań wymaga
zapewnienia wymiany danych między mikroprocesorem i urządzeniami zewnętrznymi
(klawiatura, wyświetlacz, czujniki, układy wykonawcze), a w niektórych przypadkach także
między pamięcią danych a urządzeniami zewnętrznymi.
Układy wejścia/wyjścia pośredniczą w wymianie informacji między mikroprocesorem
a urządzeniami zewnętrznymi. Układy wejścia/wyjścia można podzielić na:
− proste układy wejścia/wyjścia, w których podstawowym elementem jest rejestr danych
lub bramka trójstanowa,
− programowalne, uniwersalne układy wejścia/wyjścia, w których oprócz rejestrów danych
występują rejestry sterujące pozwalające na ustalenie określonego trybu pracy układu,
rejestr statusowy, przechowujący informację o stanie układu oraz wewnętrzny układ
sterowania
− specjalizowane układy wejścia/wyjścia służące do współpracy z konkretnymi
urządzeniami
Komunikacja mikroprocesora z otoczeniem odbywa się za pośrednictwem magistral.
Układ jest wybierany odpowiednim adresem.
Wyróżnia się dwie metody adresowania pamięci i układów wejścia/wyjścia:
− adresowanie jednolite pamięci i układów wejścia/wyjścia (układy wejścia/wyjścia
współadresowalne z pamięcią),
− adresowanie rozdzielone pamięci i układów wejścia/wyjścia.
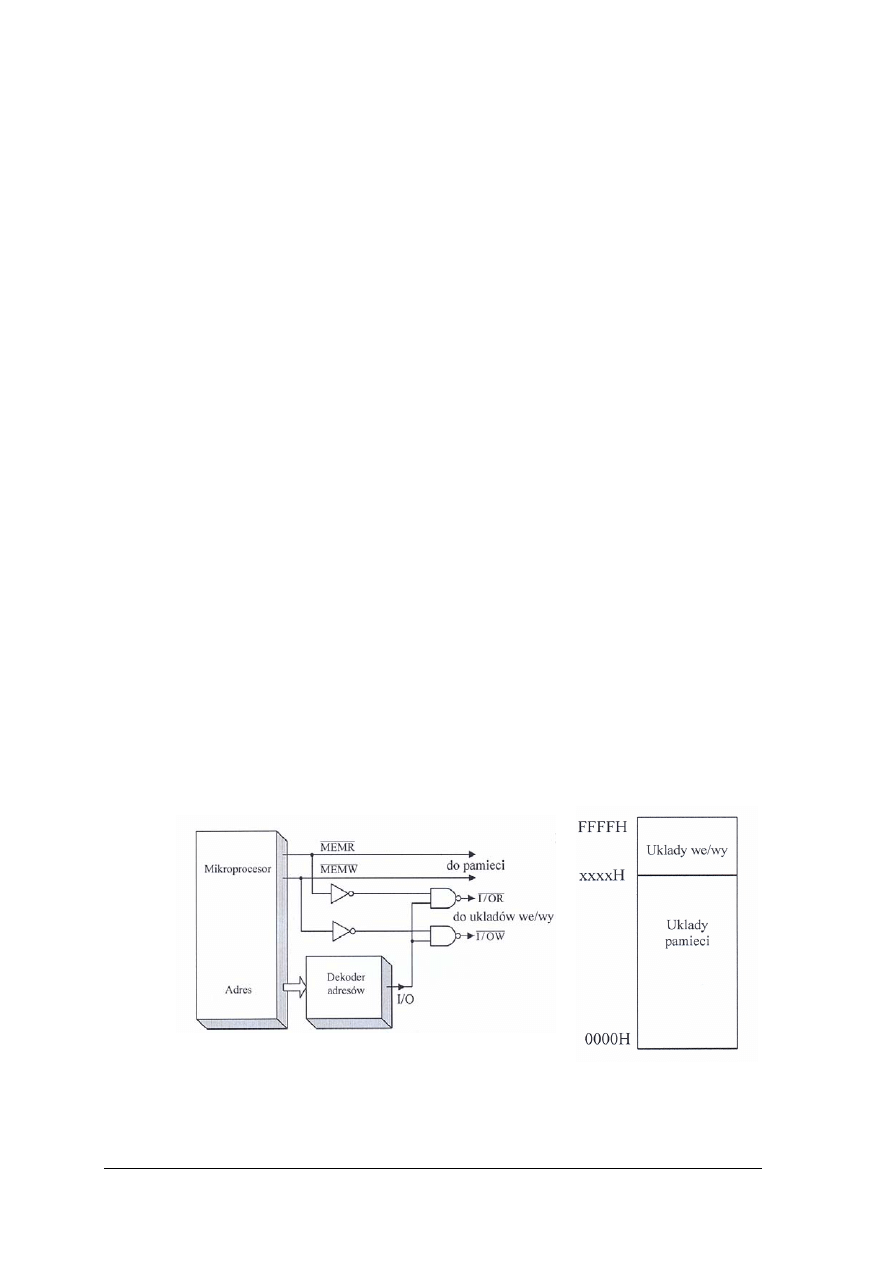
Adresowanie jednolite (wspólne) polega na dołączaniu układów we/wy w taki sam
sposób jak modułów pamięci. Pamięć i układy we/wy nie są rozróżniane przez procesor
i znajdują się w tej samej przestrzeni adresowej. Te same rozkazy i te same sygnały sterujące
służą do komunikacji z pamięcią i z układami we/wy. Dlatego układy we/wy muszą mieć
przydzielone inne adresy niż komórki pamięci.
Rys. 4. Jednolite adresowanie pamięci i układów wejścia/ wyjścia [1, str39]
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Sygnały sterujące odczytu pamięci MEMR i zapisu pamięci
MEMW
są bramkowane
sygnałem I/O z dekodera adresów wybierającego odpowiedni obszar pamięci dla układów
we/wy i tworzą sygnały sterujące zapisem danych
I/OW
i odczytu danych
I/OR
.
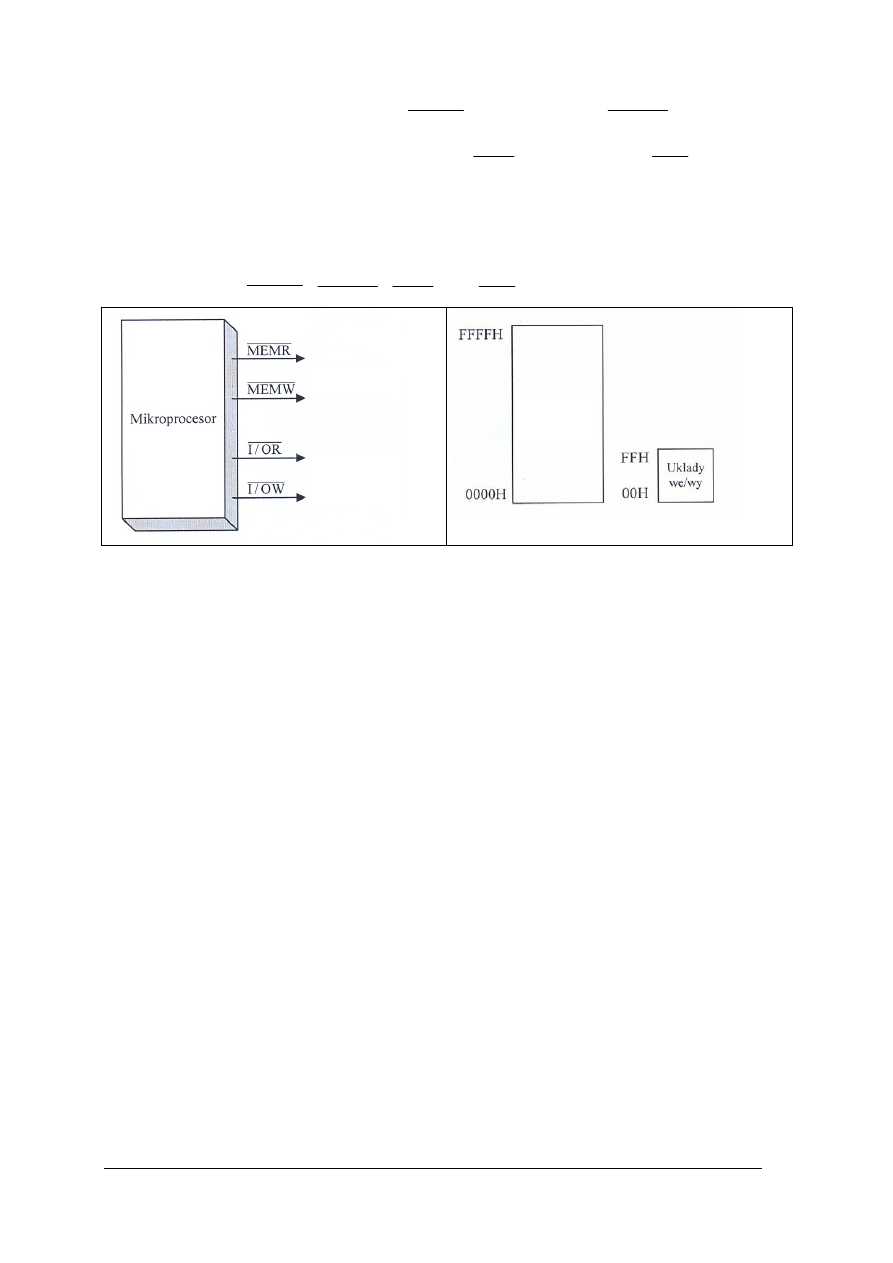
Adresowanie rozdzielone polega na tym, że pamięć i układy we/wy mają odrębne
przestrzenie adresowe – adresy komórek pamięci i układów we/wy mogą być takie same.
Lista rozkazów zawiera odrębną grupę rozkazów dotyczącą komunikacji z pamięcią,
a odrębną do komunikacji z układami wejścia–wyjścia. Mikroprocesor bezpośrednio
wystawia sygnały:
MEMR ,
MEMW
,
I/OW
oraz
I/OR
.
do pamięci
do układów
we/wy
Rys. 5. Rozdzielone adresowanie pamięci i układów wejścia/ wyjścia [1, str39]
Sposoby komunikacji między mikroprocesorem a otoczeniem:
− obsługa programowa (pooling)
− przerwania (interrupt)
− bezpośredni dostęp do pamięci (Direct Memory Access)
Obsługa programowa polega na przeglądaniu przez mikroprocesor stanów
poszczególnych układów we/wy. Mikroprocesor w sposób programowy pobiera zawartości
rejestrów statusowych poszczególnych układów we/wy, sprawdza stan odpowiednich bitów
i na ich podstawie podejmuje decyzje dotyczące określonych działań programowych
dotyczących obsługi urządzenia. Tego typu komunikacja jest bardzo prosta w realizacji
sprzętowej, jej wadą jest fakt, że odbywa się w ściśle określonym momencie realizacji
programu. Nie może więc być stosowana do obsługi urządzeń pracujących w czasie
rzeczywistym, gdzie konieczna jest natychmiastowa obsługa dołączonych urządzeń.
Współpraca z przerwaniami umożliwia praktycznie natychmiastową reakcję na żądanie
obsługi przez urządzenie zewnętrzne. W momencie przyjęcia zgłoszenia żądania obsługi
przez urządzenie procesor zawiesza realizację programu na czas obsługi urządzenia. Układ
we/wy generuje sygnał żądania przerwania INT, mikroprocesor sprawdza stan tego sygnału
pod koniec realizacji każdego rozkazu. Po wykryciu przerwania mikroprocesor:
− zapamiętuje na stosie stan licznika rozkazów (adres rozkazu, który byłby realizowany,
gdyby przerwanie nie nadeszło),
− wpisuje do licznika rozkazów adres podprogramu obsługi przerwania (wektor przerwania),
− realizuje podprogram obsługi przerwania,
− po zakończeniu obsługi przerwania przywraca ze stosu stan licznika rozkazów i wraca
do realizacji programu głównego.
Pamięć
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
Jeżeli zgłasza się więcej niż jedno przerwanie układ przerwań rozstrzyga, które
z przerwań ma być obsłużone na podstawie priorytetu.
Układ przerwań może być jedno– lub wielopoziomowy. W jednopoziomowym układzie
przerwań nie ma możliwości zawieszenia realizowanego podprogramu obsługi przerwania
przez żadne inne przerwanie (niezależnie od priorytetu). W wielopoziomowym układzie
przerwań, przerwanie o wyższym poziomie może przerwać podprogram obsługi przerwania
o niższym poziomie. Podprogram obsługi przerwania o niższym poziomie zostanie
dokończony po zrealizowaniu obsługi przerwania o wyższym poziomie.
Przerwanie może zostać przyjęte do obsługi, jeżeli:
− procesor zakończył realizację rozkazu,
− zgłaszające się przerwanie jest odblokowane,
− nie zgłasza się inne przerwanie o priorytecie wyższym,
− nie jest realizowana obsługa innego przerwania (w układzie przerwań jednopoziomowym)
lub przerwania o równym lub wyższym poziomie (w układzie przerwań
wielopoziomowym)
Tryb bezpośredniego dostępu do pamięci DMA jest stosowany podczas wymiany
danych między pamięcią a urządzeniami zewnętrznymi bez udziału mikroprocesora. Dzięki
temu możliwe jest szybsze przesyłanie bloków danych. Przesyłanie odbywa się pod kontrolą
sterownika DMA, mikroprocesor w tym czasie nie ma dostępu do magistral, nie realizuje
więc swojego programu. Przed rozpoczęciem transmisji DMA sterownik musi zostać
zaprogramowany przez umieszczenie w jego rejestrach sterujących informacji dotyczących
kierunku transmisji, ilości przesyłanych słów i adresu obszaru danych. Po zakończeniu
przesyłu następuje powrót do realizowanego programu.
4.2.2. Pytania sprawdzające
Odpowiadając pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaką rolę pełnią układy wejścia/wyjścia?
2. Jakie są rodzaje układów wejścia/wyjścia?
3. Jakie są metody adresowania?
4. Jakie są sposoby współpracy mikroprocesora z otoczeniem?
5. Na czym polega obsługa programowa?
6. O czym podczas obsługi przerwań decyduje priorytet, a o czym poziom?
7. Na czym polega obsługa z przerwaniami?
8. Na czym polega bezpośredni dostęp do pamięci?
4.2.3. Ćwiczenia
Ćwiczenie 1
Wybierz, które zdania są prawdziwe, a które fałszywe:
Zdanie: prawda
fałsz
Adresowanie jednolite pozwala na zaadresowanie większej przestrzeni
adresowej niż adresacja rozdzielona.
Przy zastosowaniu adresacji jednolitej te same rozkazy odnoszą się
do pamięci i układów wejścia/wyjścia.
Układ wejścia/wyjścia umożliwia dopasowanie czasowe między
szybszym mikroprocesorem, a wolniejszym urządzeniem
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
wejścia/wyjścia.
W przypadku jednoczesnego zgłoszenia się dwóch zgłoszeń przerwań
do obsługi zostanie przyjęte przerwanie o wyższym poziomie.
Obsługa programowa nie pozwala na ustalanie priorytetów przerwań.
Po zakończeniu obsługi przerwania program główny jest wykonywany
od rozkazu, w czasie którego nadeszło przerwanie.
Przerwanie może być przyjęte do obsługi pod warunkiem zakończenia
realizowanego cyklu rozkazowego.
Podczas bezpośredniego dostępu do pamięci dane są przesyłane
z mikroprocesora do pamięci danych.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się ze sposobami komunikacji mikroprocesora z otoczeniem,
2) dokładnie przeczytać zdania,
3) przeanalizować ich treść decydując, czy zdanie jest prawdziwe czy fałszywe,
4) zaprezentować wykonane ćwiczenie,
5) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
− treść zadania dla każdego ucznia,
− literatura z rozdziału 6.
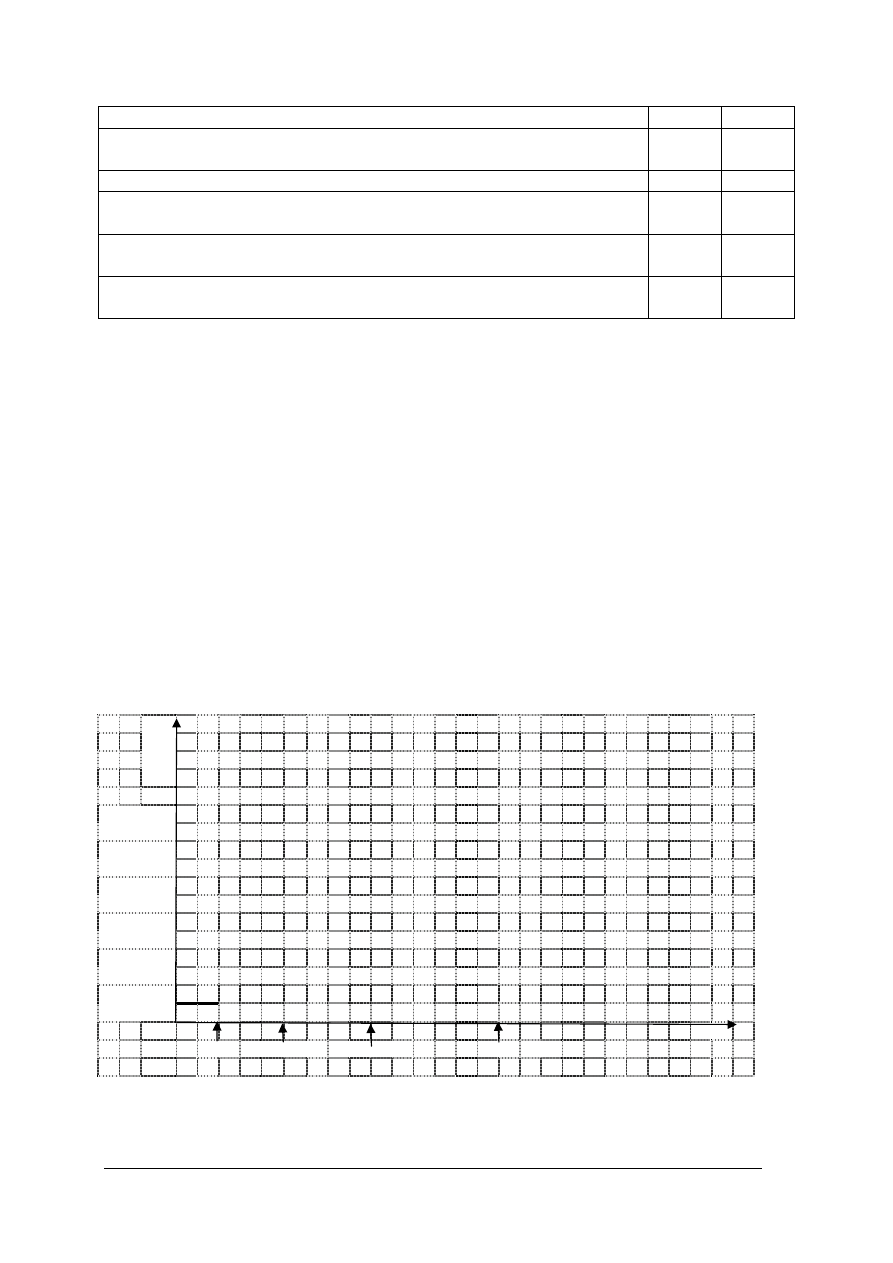
Ćwiczenie 2
Przedstaw na wykresie kolejność obsługi przerwań w jednopoziomowym układzie
przerwań. Wszystkie przerwania są odblokowane, wszystkie mogą zostać przyjęte do obsługi.
Przerwanie INT0 ma najwyższy priorytet, a INT4 najniższy. Czas trwania każdego
podprogramu obsługi przerwania – 4 jednostki.
pr
io
ry
tet
INT0
INT1
INT2
INT3
INT4
pr. gł.
t
INT2 INT4,
INT1
INT0
INT3
Na tym samym wykresie innym kolorem narysuj kolejność obsługi przerwań
w wielopoziomowym układzie przerwań, przyjmując, że przerwanie INT0 ma poziom
najwyższy i dalej każde kolejne ma poziom niższy, INT4 ma poziom najniższy.

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) w przypadku jednopoziomowego układu przerwań rozstrzygnąć, które ze zgłoszeń ma
w danej chwili najwyższy priorytet,
2) w przypadku wielopoziomowego układu przerwań dodatkowo zdecydować, czy możliwe
jest przejście do obsługi przerwania podczas trwania obsługi realizowanego
podprogramu,
3) narysować przebiegi kolejności obsługi przerwań,
4) zaprezentować wykonane ćwiczenie,
5) dokonać oceny poprawności i estetyki wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
− treść zadania dla każdego ucznia,
− literatura z rozdziału 6.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) rozróżnić metody adresacji: jednolitą i rozdzieloną?
2) wyjaśnić jakie wady i zalety ma każda z metod?
3) scharakteryzować role układów wejścia/wyjścia?
4) rozróżnić rodzaje układów wejścia/wyjścia?
5) scharakteryzować sposoby komunikacji mikroprocesora z otoczeniem?
6) wyjaśnić, kiedy korzystne jest stosowanie każdej z tych metod?
7) wymienić warunki przyjęcia
przerwania?
8) opisać działania mikroprocesora po przyjęciu przerwania?
9) zdefiniować pojęcia poziom, priorytet, wektor przerwania?
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
4.3. Mikrokontrolery rodziny ‘51
4.3.1.Materiał nauczania
Mikrokomputerami jednoukładowymi, zwanymi również mikrokontrolerami
lub mikrosterownikami, nazywana jest pewna klasa mikroprocesorów charakteryzująca się
tym, że w jednym układzie scalonym zawarty jest mikroprocesor, pamięć danych, układy
we/wy umożliwiające bezpośrednie dołączenie urządzeń zewnętrznych, układy czasowo
licznikowe, układ przerwań i inne zasoby, w niektórych mikrokontrolerach jest wbudowana
pamięć programu.
Charaktrystyka rodziny mikrokontrolerów ’51:
− 8–bitowa magistrala danych,
− 16–bitowa magistrala adresowa,
− 8–bitowy arytmometr,
− 128 B (256B) wewnętrznej pamięci danych,
− dwa 16–bitowe układy czasowo–licznikowe,
− cztery 8–bitowe porty równoległe,
− układ transmisji szeregowej,
− układ przerwań,
− możliwość dołączenia zewnętrznej pamięci danych,
− możliwość dołączenia zewnętrznej pamięci danych,
Częstotliwość pracy mikroprocesorów zawiera się w granicach od 1,2 do 20 MHz.
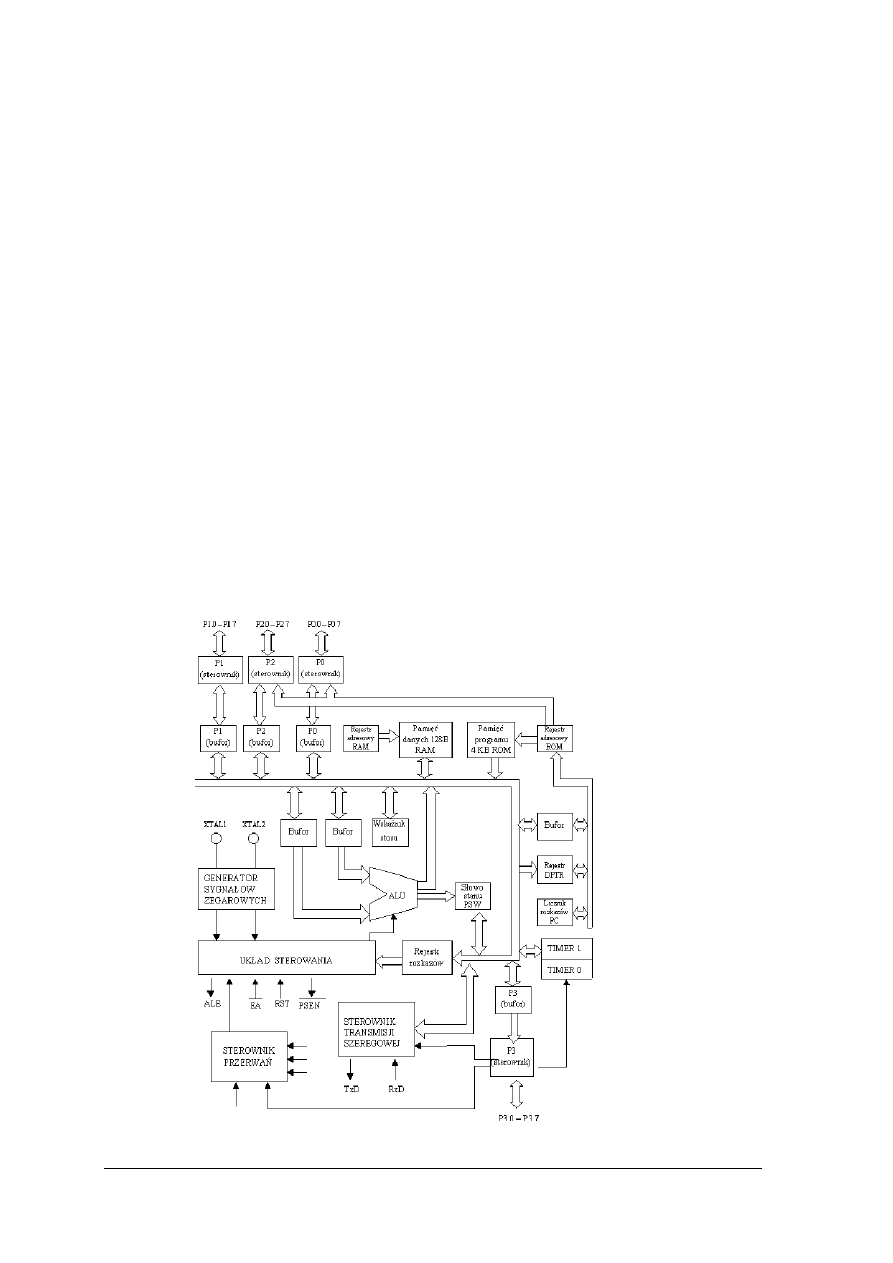
Architektura podstawowego mikrokontrolera rodziny ’51:
Rys. 6. Schemat mikrokontrolera 8051 [7]
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
ALU – jednostka arytmetyczno–logiczna
PSW – rejestr statusowy
C AC
F0 RS1
RS0
OV
– P
znaczenie flag:
C – przeniesienie (z bitu 7)
AC – przeniesienie połówkowe (z bitu 3 na 4)
F0 – znacznik ogólnego przeznaczenia, ustawiany i kasowany programowo
RS1, RS0 – wybór bieżącego banku rejestrów roboczych
OV – znacznik nadmiaru
P – flaga parzystości
Rejestry:
A, ACC – rejestr akumulatora,
B– rejestr dodatkowy używany przy mnożeniu i dzieleniu,
DPTR – rejestr adresowy zewnętrznej pamięci,
PC– licznik programu,
SP– wskaźnik stosu,
P0–P3– porty równoległe
linie portu P0 i P2 mogą służyć do dołączenia pamięci zewnętrznych,
alternatywne funkcje portu P3 przedstawia tabela 1.
Tabela 1 Alternatywne funkcje portu P3
linia Funkcja
P3.0
RxD– we portu szeregowego
P3.1
TxD– wy portu szeregowego
P3.2
INT0– we przerwania zewnętrznego
P3.3
INT1– we przerwania zewnętrznego
P3.4
T0– we licznika 0
P3.5
T1– we licznika 1
P3.6 WR–
sygnał zapisu do zewnętrznej pamięci
P3.7 RD–
sygnał odczytu z zewnętrznej pamięci
Sygnały sterujące:
PSEN
− sygnał odczytu z zewnętrznej pamięci programu,
ALE
− sygnał zatrzaskujący w zewnętrznym rejestrze młodszą część adresu podczas
współpracy z zewnętrznymi pamięciami,
EA
− sygnał wyboru pamięci programu ( EA =0– odczyt z zewnętrznej pamięci
programu, EA =1 z wewnętrznej),
RST
− sygnał zerujący procesor , zerowany jest licznik PC (start programu od
komórki zerowej), nie jest zerowana pamięć RAM.
Pamięć wewnętrzna IRAM
Tabela 2 Przestrzeń adresowa pamięci IRAM
Adresy 48–127 (30H–
7FH)
Pamięć danych użytkownika
Adresy 32–47 (20H–2FH)
Pamięć adresowana bitowo (adresy 0–127 (0H–7FH))
Adresy 24–31 (18H–1FH)
Rejestry R0–R7 – bank 3 (RB3)
Adresy 16–23 (10H–17H)
Rejestry R0–R7 – bank 2 (RB2)
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
Adresy 8–15 (8H–0FH)
Rejestry R0–R7 – bank 1 (RB1)
Adresy 0–7 (0H–7H)
Rejestry R0–R7 – bank 0 (RB0)
Obszar od adresu 0 do 31 (0H–1FH) zajmują cztery banki rejestrów (RB0...RB3)
roboczych, po osiem rejestrów w banku. Rejestry te mają oznaczenia R0 do R7 i mogą być
wykorzystywane do przechowywania danych. Wyjątek stanowią rejestry R0 i R1 każdego
bloku, które mogą być dodatkowo wykorzystane do indeksowego adresowania wewnętrznej
i zewnętrznej pamięci danych. W danej chwili dostępny jest tylko bank wybierany bitami
RS1 i RS0 rejestru statusowego PSW. W obszar e pamięci o adresach 32–47(20H–2FH)
możliwe jest zaadresowanie pojedynczego bitu komórki pamięci. Bity te są dostępne pod
adresami 0–127 (0H–7FH). Obszar pamięci o adresach 48–127 (30H–7FH) nie posiada już
żadnych specyficznych własności i wykorzystywany jest jak zwykła pamięć o organizacji
bajtowej. Cała pamięć może być adresowana jak pamięć o bajtowej organizacji w sposób
bezpośredni lub rejestrowy pośredni używając rejestrów R0 i R1.
Rejestry specjalne SFR
:
Blok rejestrów specjalnych (SFR; ang. Special Function Registers) znajduje się
w niespójnym obszarze pamięci danych mikrokontrolera o adresach 128–240 (80H–0F0H).
Obszar rejestrów SFR mikrokontrolera '51 jest wykorzystywany dwojako – z jednej strony
umieszczone są w nim wszystkie (za wyjątkiem licznika rozkazów i czterech banków
rejestrów R0–R7) rejestry sterujące pracą mikrokontrolera lub wykorzystywane bezpośrednio
przy wykonywaniu programu; z drugiej zaś strony rejestry SFR stanowią rodzaj interfejsu
pomiędzy mikroprocesorem a układami peryferyjnymi umieszczonymi wewnątrz
mikrokontrolera. Wszystkie operacje sterowania wewnętrznymi układami peryferyjnymi oraz
przesyłania danych między nimi a CPU, odbywają się właśnie za pośrednictwem rejestrów
SFR. Dostęp do każdego z tych rejestrów możliwy jest wyłącznie w trybie adresowania
bezpośredniego. Nazwy rejestrów SFR są zazwyczaj nazwami predefiniowanymi,
więc najczęściej nie trzeba znać adresu danego rejestru – wystarczy pamiętać jego nazwę.
Tabela 3 Obszar SFR
Nazwa
Adres
Pełniona funkcja
P0
128(80H)
Port we/wy 0
SP 129(81H)
Wskaźnik stosu
DPL 130(82H)
Rejestr
indeksowy DPTR (mniej znaczący bajt)
DPH 131(83H)
Rejestr
indeksowy DPTR (bardziej znaczący bajt)
PCON 135(87H)
Rejestr
sterujący stanami uśpienia
TCON 136(88H)
Rejestr
sterujący układów czasowych 0 i 1
TMOD
137(89H)
Rejestr trybu pracy układów czasowych 0 i 1
TL0
138(8AH)
Rejestr danych układu czasowego 0 (mniej znaczący)
TL1
139(8BH)
Rejestr danych układu czasowego 1 (mniej znaczący)
TH0
140(8CH)
Rejestr danych układu czasowego 0 (bardziej znaczący)
TH1
141(8DH)
Rejestr danych układu czasowego 1 (bardziej znaczący)
P1
144(90H)
Port we/wy 1
SCON 152(98H)
Rejestr
sterujący układu transmisji szeregowej
SBUF
153(99H)
Rejestr danych układu transmisji szeregowej
P2
160(0A0H) Port we/wy 2
SP 129(81H)
Wskaźnik stosu
IE
168(0A8H) Rejestr maski przerwań
P3
176(0B0H) Port we/wy 3
IP
184(0B8H) Rejestr priorytetów przerwań
PSW 208(0D0H)
Słowo stanu procesora
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
Pamięć zewnętrzna
Oprócz pamięci wewnętrznej danych możliwe jest dołączenie do mikrokontrolera
zewnętrznej pamięci danych o pojemności do 64kB. Dostęp do tego obszaru pamięci jest
tylko używając adresacji rejestrowej pośredniej, adres znajduje się w rejestrach DPTR, R0
lub R1. Jeżeli do adresacji użyto 16–bitowego rejestru DPTR, zawartość DPH jest
wpisywana do portu P2, a DPL do P0. Jeżeli do adresacji użyto R0 lub R1 modyfikowana jest
tylko zawartość P0.
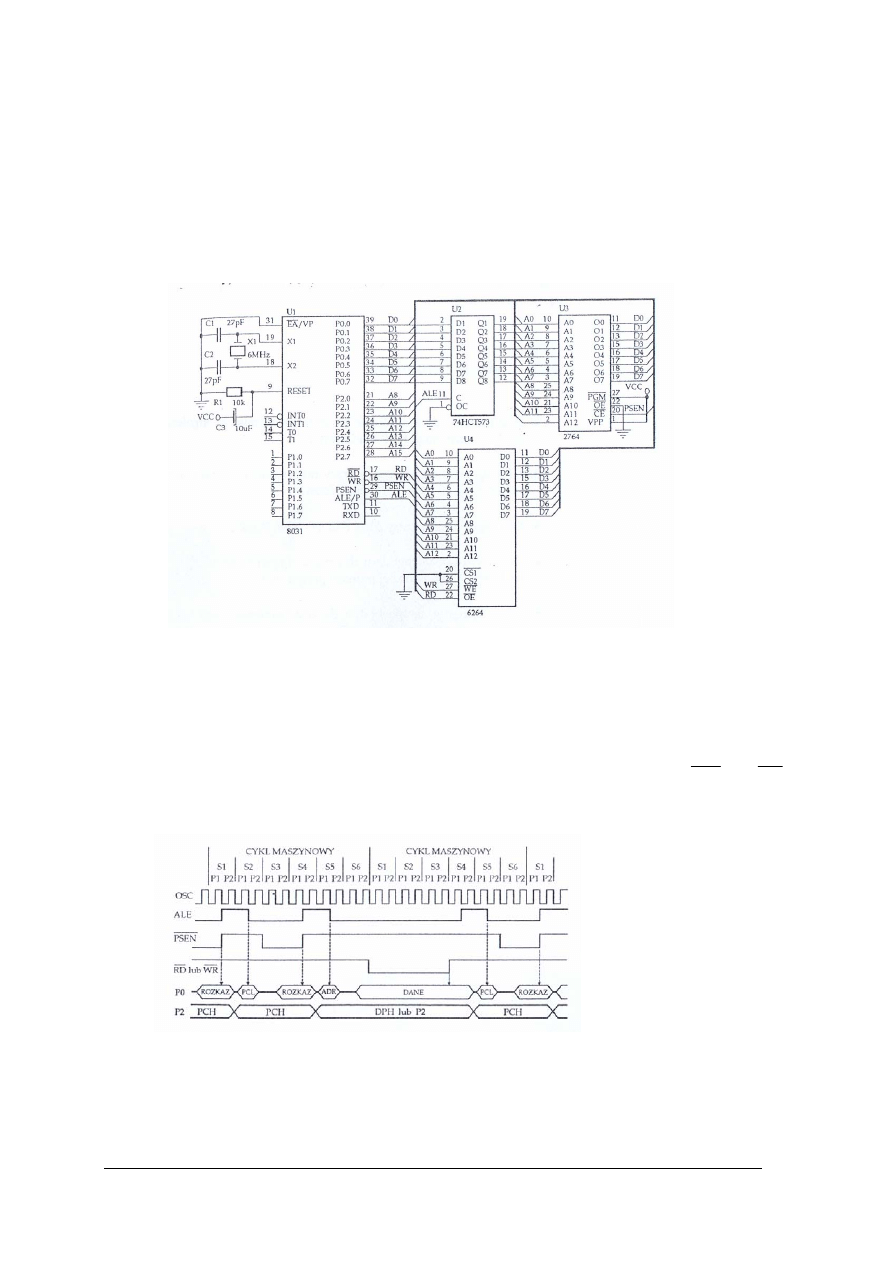
Rys. 7. Dołączenie zewnętrznej pamięci danych i programu [2, s.45 ]
Przy odczycie lub zapisie danej do pamięci zewnętrznej po odczytaniu rozkazu w takcie
S1, w takcie S5 następuje wysłanie na wyjście portu P0 mniej znaczącego bajtu adresu, który
w drugiej fazie tego taktu jest zatrzaskiwany w rejestrze sygnałem ALE. Na wyjście portu P2
jest podawany starszy bajt adresu. W pierwszej fazie pierwszego taktu S1P1 drugiego cyklu
maszynowego wykonywanie operacji dostępu do XRAM, jeden z sygnałów
WR
lub RD
(w zależności od kierunku przesyłania danej) przechodzi w stan niski uaktywniając pamięć.
Następuje odczyt lub zapis, który kończy się w pierwszej fazie czwartego taktu S4P1.
Rys. 8. Sygnały sterujące i zegarowe przy dostępie do zewnętrznej pamięci danych [2, s.44 ]
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
Pamięć programu
Obszar pamięci programu o maksymalnej objętości 64 kB może składać się z dwóch
części:
− pamięci wewnętrznej o pojemności 4kB lub 8kB,
− pamięci zewnętrznej.
Jeżeli mikrokontroler posiada wewnętrzną pamięć programu to zmieniając stan sygnału
EA można wybierać między pamięciami wewnętrzną ( EA =1 i adres mieszczący się
w wewnętrznej pamięci programu) i zewnętrzną ( EA =1 i adres przekraczający obszar
wewnętrznej pamięci programu lub EA =0). Sposób dołączenia pamięci zewnętrznej
programu został przedstawiony na rysunku 7.
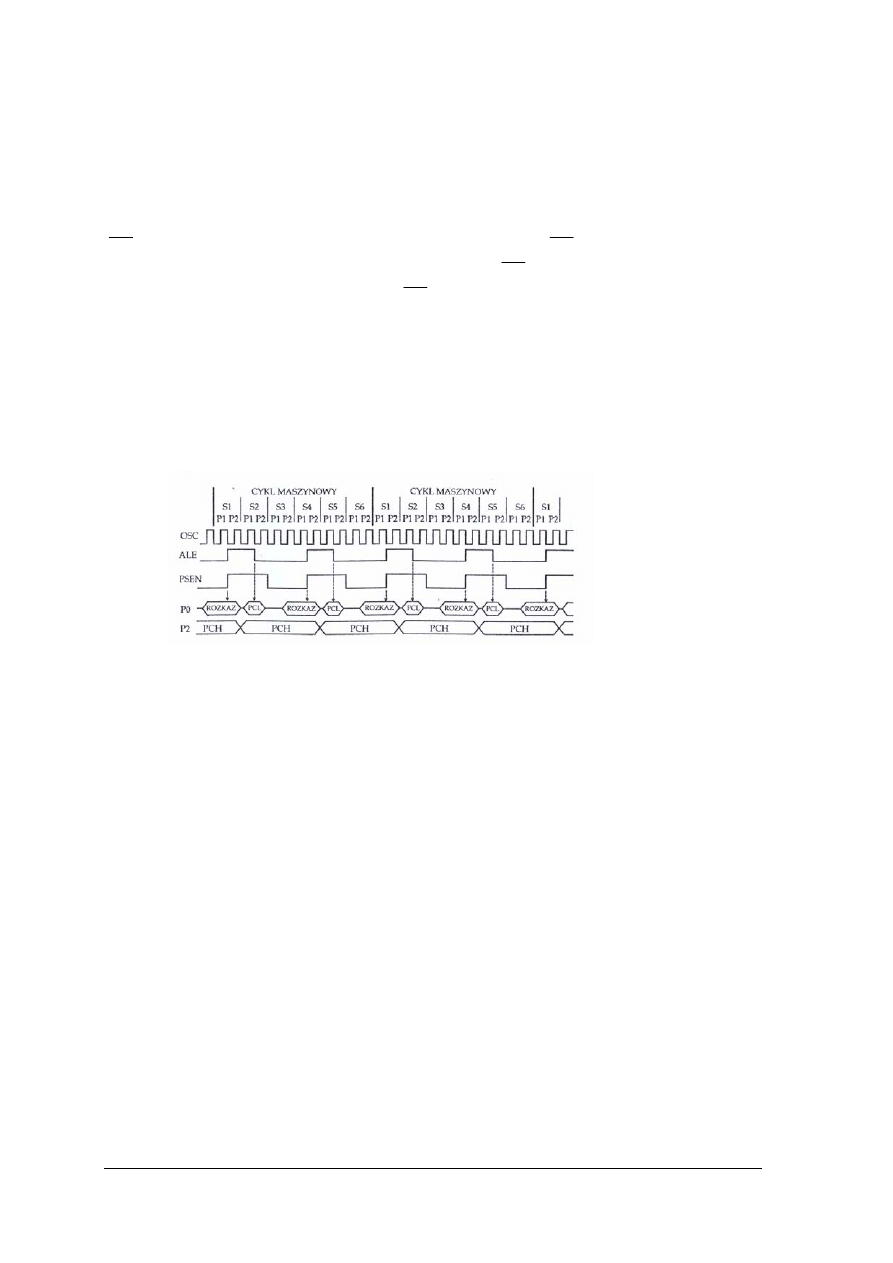
Przy pobieraniu rozkazów i danych z zewnętrznej pamięci programu jest generowany
sygnał PSEN. Podczas pobierania rozkazu z pamięci zewnętrznej w takcie S5 przez port P0
wysyłany jest mniej znaczący bajt adresu. W drugiej fazie tego taktu (S5P2) sygnał ALE
zatrzaskuje ten bajt w rejestrze. Równocześnie na wyjście portu P2 jest wysyłany starszy bajt
adresu. W pierwszej fazie szóstego taktu (S6P1) sygnał PSEN zmieniając swój stan na niski
uaktywnia pamięć programu i zostaje wystawiony bajt rozkazu.
Rys. 9. Sygnały sterujące i zegarowe przy dostępie do zewnętrznej pamięci programu [2, s.43 ]
Adresowanie różnych typów pamięci
Ponieważ mikrokontroler nie posiada osobnych rozkazów do dostępu do urządzeń
wejścia/wyjścia, to w obszarze adresowym 64kB zewnętrznej pamięci danych mogą być
również umieszczane rejestry dołączanych do systemu urządzeń we/wy.
Ponadto adresy wewnętrznej pamięci danych RAM pokrywają się z adresami
zewnętrznej pamięci danych RAM i pamięci programu, zatem, aby rozróżnić typ adresowanej
pamięci, stosuje się odpowiednie rozkazy:
− MOV dla adresowania wewnętrznej pamięci RAM
− MOVX dla adresowania zewnętrznej pamięci RAM
− MOVC dla adresowania wewnętrznej i zewnętrznej pamięci programu (rozróżniane
stanem wyprowadzenia EA oraz zakresem adresów).
Stany z obniżonym poborem mocy
Mikrokontrolery rodziny 51 mają mechanizmy pozwalające wprowadzić układ w stan,
w którym nie jest wykonywany program, a pobór prądu zasilania jest ograniczony. W stanie
jałowym (Idle) zegar taktujący zostaje odłączony, procesor jest zatrzymany (nie są
wykonywane żadne rozkazy), normalnie pracują układ czasowo-licznikowy i port szeregowy
oraz system przerwań, jeżeli był wcześniej odblokowany. Zawartość wszystkich rejestrów
i pamięci wewnętrznej nie ulega zmianie. Pobór prądu zasilania jest 8 razy mniejszy niż
w czasie normalnej pracy. Wyjście z tego stanu jest możliwe przez zerowanie systemu
lub przerwanie zewnętrzne, jeżeli było wcześniej odblokowane. W stanie obniżonego poboru
mocy Power Down następuje odłączenie zasilania od wszystkich bloków funkcjonalnych
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
z wyjątkiem pamięci wewnętrznej danych. Pobór prądu zasilania jest około 500 razy mniejszy
niż w czasie normalnej pracy. Wyjście z tego trybu jest możliwe tylko na skutek wyzerowania
mikrokontrolera.
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczenia.
1. Dlaczego mikroprocesory rodziny ’51 nazywamy mikrokontrolerami?
2. Jakie zasoby wewnętrzne posiadają mikrokontrolery rodziny ’51?
3. Jakie typy pamięci występują w mikrokontrolerze 8051. Do czego stosowany jest każdy
z typów?
4. Czy w mikrokontrolerze 8051 jest zastosowana jednolita, czy rozdzielona przestrzeń
adresowa?
5. Jakie obszary wyróżniamy w obrębie pamięci IRAM? W jaki sposób można adresować
każdy z tych obszarów?
6. Ile portów równoległych posiada mikrokontroler 8051? Jakie jest ich przeznaczenie?
7. Jakie znaczenie mają poszczególne bity rejestru PSW?
8. Jaką rolę pełni każdy z sygnałów: PSEN, ALE, EA , RST?
9. Które rozkazy zmieniają znaczniki w rejestrze PSW?
10. Gdzie znajduje się wynik operacji arytmetycznej?
4.3.3. Ćwiczenia
Ćwiczenie 1
Dobierz tryby adresacji do wybranych obszarów pamięci.
IRAM [0–7]
rejestrowa
IRAM [0–127]
rejestrowa pośrednia
XRAM [0–65535]
bezpośrednia
SFR
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) przeanalizować podane informacje,
2) dopasować metody adresacji do odpowiednich obszarów pamięci, ten sam tryb adresacji
może się odnosić do więcej niż jednego obszaru,
3) zaprezentować wykonane ćwiczenie,
4) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
− treść zadania dla każdego ucznia,
− zeszyt przedmiotowy,
− literatura z rozdziału 6.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Ćwiczenie 2
Wypełnij tabelę, wpisując, jakie będą wartości rejestrów A i B (szesnastkowo) oraz flag
po wykonaniu poleceń, jeżeli realizacja polecenia nie ma wpływu na zmianę wartości
wpisz „–„:
Program A
B
C
Z
załaduj do akumulatora liczbę 255
inkrementuj akumulator
prześlij zawartość akumulatora do rejestru B
wyzeruj flagę przeniesienia C
załaduj do akumulatora liczbę 7
przesuń zawartość akumulatora o 1 bit w prawo
prześlij zawartość akumulatora do rejestru B
załaduj do akumulatora liczbę 0Fh
prześlij zawartość akumulatora do rejestru B
wykonaj iloczyn logiczny zawartości akumulatora z liczbą
F0h
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) przeanalizować każdy z zestawów poleceń,
2) obliczyć wartości, które zostaną umieszczone w rejestrach A i B po wykonaniu poleceń,
3) zastanowić się, które z poleceń mogą wpływać na zmiany flag C i Z, oraz ustalić jaką
będą mieć wartość,
4) zaprezentować wykonane ćwiczenie,
5) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
− treść zadania dla każdego ucznia,
− literatura z rozdziału 6.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) omówić budowę mikrokontrolera 8051 na podstawie schematu
blokowego?
2) omówić zasoby wewnętrzne
mikrokontrolera?
3) wymienić wszystkie typy pamięci i omówić ich rolę?
4) omówić sposób dołączenia pamięci zewnętrznych danych
i programu do mikrokontrolera?
5) scharakteryzować wybrane rejestry mikrokontrolera?
6) podać znaczenie sygnałów sterujących w mikrokontrolerze?
7) omówić sposoby obniżania poboru mocy mikrokontrolera
i sposoby wychodzenia z tych stanów?
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
4.4. Programowanie mikrokontrolera w języku asemblera
4.4.1. Materiał nauczania
Lista rozkazów mikrokontrolerów rodziny ‘51
Oznaczenia:
R
r
− rejestry R0–R7,
direct
− adres w IRAM/ SFR,
R
i
− rejestry R0 lub R1 (używane w adresacji rejestrowej pośredniej),
Bit
− bity adresowalne w IRAM/ SFR,
data
− dana 8–bitowa,
data16
− dana 16–bitowa,
addr16
− adres w 64k,
addr11
− adres na stronie 2k,
Rel
− adres względny,
/bit
− negacja bitu.
Tabela 4 Operacje arytmetyczne i logiczne:
Tryb adresacji
Flagi
mnem
onik
rejestr. bezpośr. rej.
pośr. natychm.
C AC
OV
operacje arytmetyczne
Dodaj A
←A+
ADD A,R
r
A,dir A,@R
i
A,#data x x x
Dodaj A
←A+ +C
ADDC A,R
r
A,dir A,@R
i
A,#data x x x
Odejmij A
←A+ +C SUBB A,R
r
A,dir A,@R
i
A,#data x x x
Inkrementuj INC
A/R
r
/
DPTR
dir @R
i
Dekrementuj DEC
A/R
r
dir @R
i
Mnóż A*B
MUL AB– wynik w BA 0
x
Dziel
DIV AB– wynik: A– wynik, B– reszta
0
x
Poprawka dziesiętna DA
A
x
operacje logiczne
Iloczyn log. AND
ANL
A,R
r
dir,A
A,dir A,@R
i
A,#data
dir,#data
Suma log. OR
ORL
A,R
r
dir,A
A,dir A,@R
i
A,#data
dir,#data
Modulo 2 XOR
XRL
A,R
r
dir,A
A,dir A,@R
i
A,#data
dir,#data
Neguj
CPL
A
Zeruj
CLR
A
Obrót w prawo
RR
A
Obrót w lewo
RL
A
Obrót w prawo z C
RRC
A
x
Obrót w lewo z C
RLC
A
x
Zamień 4 bity
SWAP A
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
Tabela 5 Operacje przesłań danych:
Kopiuj A
←
MOV A,R
r
A,dir A,@R
i
A,#data
Kopiuj R
r
←
MOV R
r
,A R
r
,dir
R
r
,#data
Kopiuj dir
←
MOV dir,A
dir,R
r
dir,dir dir,@R
i
dir,#data
Kopiuj @R
i
←
MOV @R
i
,A @R
i
,dir
@R
i
,#data
Kopiuj DPTR
←
MOV
DPTR,#data16
Kopiuj z pamięci
programu
MOVC A,@A+DPTR
A,@A+DPTR
Kopiuj z/do zewn.
pam. danych
MOVX A,@R
i
A,@DPTR
@R
i
,A @DPTR,A
Zamień
XCH
A,R
r
A,dir A,@R
i
Zamień mł. 4 bity
XCHD
A,@R
i
Zapisz na stos
PUSH
dir SP=SP+1, (SP)
←dir
Odczytaj ze stosu
POP
dir dir
←(SP), SP=SP–1
Tabela 6 Operacje na bitach:
Zeruj CLR
C
bit
Ustaw SETB
C
bit
Neguj CPL
C
bit
Iloczyn logiczny
ANL
C,bit
C,/bit
Suma logiczna
ORL
C,bit
C,/bit
Kopiuj MOV
C,bit
bit,C
Tabela 7 Skoki
Wywołanie podprogramu
LCALL addr16 ACALL addr11
Powrót z podprogramu
RET
Powrót z podprogramu
obsługi przerwania
RETI
Skok
LJMP addr16 AJMP addr11 SJMP rel JMP @A+DPTR
Skok warunkowy
JC rel
JNC rel
JZ rel
JNZ rel
Skok warunkowy od bitu
JB bit,rel
JNB bit,rel
JBC bit,rel (po skoku bit=0)
CJNE A,dir,rel
CJNE A,#data,rel
Porównaj, skocz jeśli
≠
CJNE R
r
,#data,rel CJNE
@R
i
,#data,rel
Zmniejsz, skocz jeśli
≠
0 DJNZ
R
r
,rel DJNZ
dir,rel
Nic nie rób
NOP
Każdy mikrokontroler działa zgodnie z programem umieszczonym w pamięci programu.
Do napisania programu niezbędna jest znajomość języka niskiego poziomu – kodzie
asemblera.
W przypadku mikrokontrolerów rodziny 51 można zastosować środowisko programowe
m535 firmy Kail.
Etapy pisania i kompilowanie programu:
1. Przygotowanie algorytmu programu np. w postaci schematu blokowego.
2. Napisanie programu. Program należy napisać w edytorze tekstowym (np. notatniku)
i zapisać pod nazwą składającą się z maksymalnie 8 znaków (bez spacji)
z rozszerzeniem asm np. program.asm. Wielkość liter nie ma znaczenia zarówno
w nazwie jak i w kodzie programu.

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
3. Linia programu ma postać:
[etykieta:] mnemonik rozkazu [operand],[operand] [;komentarz]
Liczby przedstawiamy dziesiętnie, binarnie – wówczas liczbę należy zakończyć literą
b lub szesnastkowo – liczbę należy zakończyć literą h. Argument szesnastkowy
rozpoczynający się od litery musi być poprzedzony cyfrą 0.
4. Program powinien rozpoczynać się od dyrektywy org (np. org 0– kompilator umieści
program od adresu 0), a kończyć dyrektywą end (do tego miejsca program będzie
kompilowany).
5. Po napisaniu programu należy go skompilować a51.exe nazwa_programu.asm.
Asembler sprawdza, czy zbiór źródłowy nie ma błędów w składni, za nazwy stałych
podstawia odpowiednie wartości liczbowe, za etykiety – adresy. Następnie generuje dwa
zbiory wynikowe:
nazwa_programu.lst
, w którym zbiór źródłowy jest rozszerzony o adresy
i kody rozkazów, numerację wierszy, tablicę symboli wraz z wartością
lub adresem pod którym występują, wskazane są również ewentualne błędy,
nazwa_programu.obj
, który jest plikiem wejściowym dla linkera lub konwertera
INTEL–HEX.
6. Jeżeli program wynikowy ma być w standardzie INTEL–HEX należy wywołać
konwerter ohs51.exe nazwa_programu.obj, wynikiem będzie plik nazwa_programu.hex.
7. Program może być podzielony na segmenty związane z obszarem pamięci, w którym
mają być umieszczone. Segmenty mogą być absolutne (czyli takie, których adresy są
ustalone przez programistę) lub relokowalne (czyli takie, których adresy są ustalane na
etapie łączenia modułow programu)
8. Jeżeli program wynikowy ma być połączony z wielu modułów należy zastosować linker,
który połączy relokowalne segmenty w jeden segment, ustali adresy absolutne
i utworzy zbiór wyjściowy zawierający cały program. Wywołanie linkera odbywa się
przez podanie jego nazwy (l51.exe), listy nazw zbiorów wejściowych w kolejności,
w jakiej mają być łączone moduły i opcjonalnie nazwy zbioru wyjściowego. Jeżeli nie
podamy nazwy zbioru wyjściowego to zostanie nadana nazwa pierwszego wejściowego:
l51.exe zb1.obj, zb2,obj,….[to zb_wy.abs]
9.
Dyrektywy asemblera:
1. Dyrektywy definiujące symbole
Dyrektywa SEGMENT
Dyrektywą tą można zadeklarować nazwy symboliczne segmentów relokowalnych i ich
typ (tzn. w obszarze jakiego typu pamięci ma być umieszczony) oraz ewentualnie sposób
relokacji. Nazwa segmentu jest nazwą symboliczną – oznacza adres, od którego rozpoczyna
się ten segment
Postać ogólna dyrektywy:
nazwa _ segmentu SEGMENT typ _ segmentu [ sposób _ relokacji ]
np: PROG_1 SEGMENT CODE
Typ segmentu określa obszar pamięci, gdzie deklarowany segment ma być
umieszczony:
CODE
– obszar pamięci programu ( PGM ),
XDATA
– obszar zewnętrznej pamięci danych,
DATA
– obszar wewnętrznej pamięci danych adresowany bezpośrednio (adres 0
÷127),
IDATA
– obszar wewnętrznej pamięci danych adresowanych pośrednio (adres 0
÷127),
BIT
– obszar wewnętrznej pamięci danych adresowany bitowo (32 47– adresy bitów 0 127).
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
Sposób relokacji – dotyczy sposobu zapisu pliku po linkowaniu w pamięci CODE. Bez
podania sposobu relokacji pliki są umieszczane w pamięci kolejno, bez odstępów, w pamięci
CODE. Podając sposób relokacji można wprowadzać odstępy. Możliwości relokacji:
INPAGE
– na stronie
INBLOCK
– w bloku,
BITADDRESSABLE
– w obszarze pamięci adresowanej bitowo,
UNIT
– bez odstępów – domyślnie, jeżeli nie podany inny sposób relokacji.
Dyrektywa EQU
Dyrektywa ta pozwala na nadawanie symbolowi (nazwie symbolicznej) wartości.
Definiuje ona tzw. stałe kompilacji tzn. wartość danego symbolu nadana dyrektywą EQU
nie może zostać zmieniona ani taką samą dyrektywą, ani żadną inną w całym programie.
Ogólna postać: nazwa_symbolu EQU wartość_symbolu
Nadawanie symbolowi wartości może być dokonywane jednym z trzech sposobów:
podanie konkretnej wartości np:
LIMIT EQU 1200
R8 EQU 08
podanie symbolu wcześniej znanego np:
KONIEC EQU LIMIT+5
WARTOSC EQU KONIEC+’A’
podanie symbolu znanego asemblerowi (np. symbolicznej nazwy rejestru z SFR) np:
SERIAL EQU SBUF
LICZNIK EQU R5
BUSY EQU ACC.7
Dyrektywa SET
Dyrektywa ta nadaje wartości symbolowi (nazwie symbolicznej). Pozwala ona
na zdefiniowanie tzw. zmiennych kompilacji tzn. takich symboli, których wartości można
zmieniać w programie inną dyrektywą SET powołując się na nazwę (symbolu).
Ogólna postać: nazwa_ symbolu SET wartość_symbolu
Nadanie wartości symbolowi jest możliwe na 3 różne sposoby:
przez podanie konkretnej wartości np:
VALUE SET 100
przez podanie symbolu wcześniej znanego np:
LIMIT EQU 1200
VALUE SET LIMIT–200
przez podanie symbolu znanego asemblerowi np:
COUNTER SET R1
Dyrektywa SET odnosząca się do jednej nazwy symbolicznej może wystąpić
wielokrotnie w danym programie. Dyrektywy SET i EQU definiują nazwy symboliczne
w tym obszarze pamięci, na który jest nastawiony wskaźnik w momencie ich występowania
w programie.
Dyrektywa BIT
Dyrektywa BIT pozwala na zdefiniowanie nazwy symbolicznej bitu i podanie jego adresu
tzn. przyporządkowuje nazwie bitu adres z przestrzeni pamięci danych adresowanej bitowo.
Postać ogólna: Nazwa_bitu BIT adres_bitu
Adres bitu może być podany w następujący sposób:
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
jako adres absolutny bitu, przy czym może on być podany jako adres kolejnego bitu
w przestrzeni adresowej lub jako numer bitu w komórce pamięci adresowanej bitowo.
Komórka ta musi leżeć w obszarze wewnętrznej pamięci danych adresowanym bitowo tzn.
w obszarze 32
÷47 (20
H
÷2F
H
) np.:
X_OFF BIT 24H.2
jako adres w postaci symbolicznej zdefiniowany wcześniej poprzez symbol
(tzn. nazwę symboliczną bitu ) np.:.
ALARM BIT X_OFF+1
jako adres w postaci symbolicznej poprzez symbol znany asemblerowi np.:
KLAWISZ BIT P1.0
ZNACZNIK BIT C
BSY BIT ACC.7
Dyrektywy DATA ( IDATA, XDATA, CODE ).
Są to dyrektywy definiujące wartość symbolu (nazwy symbolicznej) w obszarach
pamięci danych i programu:
DATA
– wewnętrzna pamięć danych,
IDATA
– wewnętrzna pamięć danych,
XDATA
– zewnętrzna pamięć danych,
CODE
– pamięć programu.
Postać ogólna: Nazwa symbolu DATA wartość
Wartość może być podana jako :
wartość bezwzględna np:
RESULT DATA 40H
symbol (nazwa symboliczna) zdefiniowana poprzednio np:
WYNIK DATA RESULT+1
symbol znany asemblerowi (z zasobów programowych) np:
REJ_SZER DATA SBUF
Analogicznie dla pozostałych obszarów pamięci np.:
BUFFER IDATA 60H
TIME XDATA 100H
RESTART CODE 00H
INT_VEC_1 CODE RESTART+0BH
Dyrektywy DATA, IDATA, XDATA, CODE pozwalają na nadanie symbolowi wartości
oraz atrybutu umieszczenia go w odpowiedniej przestrzeni adresowej (tzn. w odpowiednim
typie pamięci).
Dyrektywy rezerwacji i inicjacji pamięci (w aktywnym segmencie).
Dyrektywa DS
– define storage, dyrektywa ta pozwala na rezerwację określonej ilości
bajtów pamięci
Ogólna postać: [ etykieta: ] DS ilość_bajtów
np: GAP: DS 20
DS 5
Dyrektywa DB
– define bajt
Dyrektywa DB inicjuje (bajtowo) poszczególne komórki pamięci tzn. pozwala zapisać
w nich liczby lub znaki.
Ogólna postać: [ etykieta ] DB wartość [, wartość1, ... , ] np.:
LAB: DB ‘WCIŚNIJ DOWOLNY KLAWISZ’,0
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
REG: DB 0, 1, 8, ‘A’, ‘0’, ‘; ‘
Dyrektywa DW – define word.
Definicja pozwala inicjować 2 kolejne komórki pamięci np.:
TAB: DW 5AF3H
LICZBY: DW 1, 2, 3 – zapis każdej liczby w pamięci na 2 bajtach będzie miał
postać 0001H, 0002H itd.
Dyrektywa ta często stosowana jest do definiowania adresów programów.
Dyrektywa DBIT
pozwalająca na określenie wartości bitu.
Postać ogólna: [ etykieta: ] DBIT wartość
Wartość bitu można określić 3 sposobami, a mianowicie:
wartość konkretna ( domyślnie tylko 0 lub 1 ) np:
KOD: DBIT 0, 1, 1, 0,
poprzez nazwę symboliczną wcześniej zdefiniowaną np:
PAL EQU 1b
TEN_BIT DBIT PAL
DBIT NOT ( PAL )
nazwę znaną asemblerowi np:
INNY_BIT DBIT P0.0
Dyrektywy udostępniające nazwy
Dyrektywy udostępniające nazwy to: PUBLIC, EXTERN, NAME . wykorzystywane
one są w programach wielomodułowych.
Dyrektywa PUBLIC
(upubliczniona)
Służy do przekazania nazwy symbolicznej do innego modułu, aby nazwa ta była
widoczna na zewnątrz i można było wykorzystać jej wartość w innym module.
Postać ogólna: PUBLIC symbol [, symbol ] np :
PUBLIC PRINT_STR
Dyrektywa EXTERN
Dyrektywa ma zastosowanie, gdy używamy w pliku symboli zdefiniowanych w innych
plikach (upublicznionych dyrektywą PUBLIC). Używając symbolu z zewnątrz należy
zapewnić tzw. zgodność atrybutów to znaczy, że zapis danego symbolu jest w tym samym
obszarze pamięci (taki sam typ), w którym będzie szukana.
Postać ogólna: EKSTERN Typ_segmentu ( lista_symbol ) np:
EKSTERN CODE (A2B, B2A )
EKSTERN DATA ( FLAGI )
Dyrektywa NAME
Dyrektywa NAME służy do deklaracji nazwy modułu.
Postać ogólna: NAME nazwa_obiektu
Nazwa obiektu może posiadać do 40 znaków.
Dyrektywy sterujące.
Dyrektywami sterującymi są: END, USING, ORG, RSEG, CSEG, DSEG, XSEG,
ISEG
, BESEG.
Dyrektywa END
Dyrektywa ta określa koniec modułu programu. Musi nią być zakończony moduł. Po
identyfikacji dyrektywy END w pliku źródłowym kompilator kończy tłumaczenie programu.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
Dyrektywa USING
Służy ona do wyboru bieżącego rejestru. Adresy tych rejestrów są określone przez nazwy
symboliczne AR0
÷ AR7. Dzięki temu można jednocześnie wykorzystywać 2 banki rejestru
(jeden wynikający z USING a drugi z PSW (RS1,RS0).
Dyrektywa ORG
Nadaje ona wartość wskaźnika w bieżąco rozpatrywanym segmencie.
Postać ogólna: ORG argument
Argument ma tu znaczenie adresu pamięci (bajtowo) np.:
ORG 100H
moduł zostanie skompilowany i umieszczony w pamięci programu od adresu 100H.
Dyrektywa RSEG
Kompilator umieści wszystkie segmenty relokowalne o danym typie w tym samym typie
pamięci.
Postać ogólna: RSEG nazwa_symbol_segment_relokowalny np.:
DATA_SEG SEGMENT DATA – określenie segmentu w pamięci DATA
RSEG DATA_SEG
CODE_SEG SEGMENT CODE – określenie segmentu w pamięci DATA
RSEG CODE_SEG
Dyrektywy ustalające absolutny segment
CSEG
– segment pamięci programu jako bieżący,
DSEG
– segment pamięci danych adresowanych bajtów,
XSEG
– segment pamięci zewnętrznej danych,
ISEG
– segment pamięci danych adresowanych pośrednio,
BSEG
– segment pamięci danych dostępnych bitowo.
Makrodefinicje
Makro to zestaw instrukcji asemblera. Ciąg instrukcji występujący po linii zawierającej
dyrektywę MACRO, aż do najbliższej dyrektywy ENDM, tworzy makro o określonej nazwie.
Po zdefiniowaniu cały taki zestaw może być włączony w kod źródłowy programu poprzez
wywołanie makra. W treści makr mogą występować bez ograniczeń wywołania innych makr,
ale nie może wystąpić definicja innego makra. Makro jest wywoływane poprzez umieszczenie
jego nazwy w polu rozkazu danej linii programu. Przy wywołaniu podawane są parametry
aktualnego makra. W czasie wstawiania makra w kod programu asembler zastępuje wszystkie
parametry formalne parametrami aktualnymi.
Postać ogólna: Nazwa_makro MACRO [ parametry]
Przykład:
CLEAR MACRO G1, G2 – makrodefinicja – zapis pod adres G1 wartości G2
MOV R0, # G1
MOV A, # G2
MOV @ R0, A
tzw. ciało makrodefinicji
ENDM
Wywołanie:
CLEAR 20H,0
CLEAR 5,’A’

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
Instrukcje sterujące języka asembler 51
Są to instrukcje umieszczone w pliku źródłowym programu, służące do określenia
dodatkowych warunków tłumaczenia (kompilacji) programu. Instrukcje te są poprzedzone
znakiem $.
$ INCLUDE
– pozwala na włączenie do tłumaczonego pliku innego pliku źródłowego
np:
$ INCLUDE ( REG.535.INC )
$ DEBUG / NODEBUG
($DB/ NDB)– dodawanie do pliku objaśnień wszystkich nazw
symbolicznych (lokalnych i publicznych)
$ ERRORPRINT/NOERRORPRINT
($EP, $NEP) wskazanie nazwy pliku, w którym
mają być umieszczane błędy i opisy błędów np:
$ EP ( BLEDY.ERR )
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. W jaki sposób zmieniają się zawartości rejestrów, komórek pamięci i znaczniki na skutek
wykonania poszczególnych rozkazów (przeanalizuj na kilku przykładach)?
2. Jaki będzie wynik działania analizowanego fragmentu programu?
3. Jakie są zasady pisania programu w języku asemblera?
4. W jaki sposób skompilować program i poprawić ewentualne błędy?
5. W jaki sposób uruchomić program używając zestawu uruchomieniowego korzystając
z pracy krokowej, ciągłej i pułapek?
6. Jak wykorzystywać w programach istniejące podprogramy?
7. Do czego służą dyrektywy asemblera, na przykład ORG, DB, END, EQU, SET?
4.3.3. Ćwiczenia
Ćwiczenie 1
Napisz i uruchom programy przemieszczania tablic pomiędzy różnymi typami pamięci:
− W pamięci IRAM od adresu 20h znajduje się tablica 30 danych. Napisz i uruchom
program, który przepisze tablicę do pamięci XRAM od adresu 0.
− W pamięci programu znajduje się tablica zakończona znacznikiem końca – liczbą FFH.
Napisz i uruchom program, który przepisze tablicę do pamięci
IRAM od adresu 20H.
− Napisz i uruchom program, który przepisze z tablicy w pamięci XRAM od adresu 0 do
IRAM od adresu 20.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) opracować algorytm każdego programu i przedstawić go w postaci schematu blokowego,
2) napisać programy w języku asemblera,
3) skompilować programy, poprawić ewentualne błędy,
4) uruchomić programy używając zestawu uruchomieniowego,
5) sprawdzić poprawność działania programów,
6) zaprezentować wykonane ćwiczenie,
7) dokonać oceny poprawności wykonanego ćwiczenia.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Wyposażenie stanowiska pracy:
− komputer PC,
− oprogramowanie umożliwiające kompilowanie i debbugowanie programu,
− zestaw uruchomieniowy z oprogramowaniem,
− literatura z rozdziału 6.
Ćwiczenie 2
W pamięci IRAM znajdują się dwie tablice danych: TAB1 od adresu 20h i TAB2 od
adresu 30h. Obie tablice zawierają po 10 danych jednobajtowych liczb dziesiętnych. Napisz
program, który obliczy iloczyny par liczb pobranych z obu tablic, a wyniki w postaci
dwubajtowych liczb dziesiętnych zapisze do pamięci XRAM od adresu 0. Wyniki zapisać w
kolejności: starszy bajt – młodszy bajt.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) opracować algorytm programu i przedstawić go w postaci schematu blokowego,
2) w celu konwersji liczb z postaci dziesiętnej na szesnastkową i konwersji wyniku
z szesnastkowego na dziesiętny wykorzystać gotowe programy konwersji lub napisać
własne podprogramy,
3) napisać program w języku asemblera,
4) skompilować program, poprawić ewentualne błędy,
5) uruchomić program używając zestawu uruchomieniowego,
6) sprawdzić poprawność działania programu,
7) zaprezentować wykonane ćwiczenie,
8) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
− komputer PC,
− oprogramowanie umożliwiające kompilowanie i debbugowanie programu,
− zestaw uruchomieniowy z oprogramowaniem,
− literatura z rozdziału 6.
Ćwiczenie 3
W parach rejestrów R4–R5 i R6–R7 znajdują się liczby dwubajtowe. Napisz program,
który, w zależności od zawartości rejestru R4, wykona odpowiednie działanie na liczbach
dwubajtowych i wynik działania umieści w pamięci XRAM od adresu 0.
Działania:
R4=0 – dodawanie,
R4=1 – odejmowanie,
R4=2 – mnożenie,
R4=3 – dzielenie (część całkowita i reszta z dzielenia).
* wykonaj zadanie dla liczb w zapisie znak– moduł (pierwszy bajt– bajt znaku
0– dodatni, 1– ujemny, bajty drugi i trzeci– wartość bezwzględna liczby), wyniki zapisz
w postaci liczb pięciobajtowych (1 bajt–znak, cztery następne– wartość bezwzględna liczby).
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) opracować algorytm programu i przedstawić go w postaci schematu blokowego,
2) napisać program w języku asemblera,

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
3) skompilować program, poprawić ewentualne błędy,
4) uruchomić program używając zestawu uruchomieniowego,
5) sprawdzić poprawność działania programu,
6) zaprezentować wykonane ćwiczenie,
7) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
− komputer PC,
− oprogramowanie umożliwiające kompilowanie i debbugowanie programu,
− zestaw uruchomieniowy z oprogramowaniem,
− literatura z rozdziału 6.
Ćwiczenie 4
Przy pomocy dyrektyw asemblera zadeklaruj 16 bajtów w pamięci IRAM jako obszar
stosu, a następnie ustal wskaźnik stosu i wypróbuj działanie w programie zawierającym
wywołanie podprogramu i instrukcje PUSH i POP.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zadeklarować stos jako segment w pamięci IRAM,
2) określić jego rozmiar – zarezerwować 16 bajtów,
3) ustalić wskaźnik stosu rozkazem MOV SP,#…. pamiętając, że przed złożeniem danej
na stos wskaźnik jest inkrementowany,
4) napisać prosty program zawierający co najmniej jedno wywołanie podprogramu i parę
instrukcji PUSH i POP,
5) skompilować program, poprawić ewentualne błędy,
6) uruchomić program używając zestawu uruchomieniowego,
7) sprawdzić poprawność działania programu,
8) zaprezentować wykonane ćwiczenie,
9) dokonać oceny poprawności wykonanego ćwiczenia.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) omówić działanie poszczególnych rozkazów z listy rozkazów?
2) dobrać odpowiednie rozkazy do zaplanowanego działania?
3) napisać program w języku
asemblera?
4) skompilować program i poprawić błędy?
5) uruchomić program używając zestawu uruchomieniowego,
poprawić jego działanie?
6) stosować dyrektywy asemblera w pisanych programach?
7) używać podprogramów, definiować makrodefinicje?
8) stosować linker do łączenia segmentów programu?

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadań o różnym stopniu trudności. Zadania: 1–14 są zadaniami
wielokrotnego wyboru i tylko jedna odpowiedź jest prawidłowa; zadania: 15–20
to zadania wymagające udzielenia krótkiej odpowiedzi.
5. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi:
− w zadaniach wielokrotnego wyboru zaznacz prawidłową odpowiedź X (w przypadku
pomyłki należy błędną odpowiedź zaznaczyć kółkiem, a następnie ponownie
zakreślić odpowiedź prawidłową),
− w zadaniach do uzupełnienia wpisz rozwiązania.
6. Test składa się z dwóch części o różnym stopniu trudności: I część – poziom
podstawowy, II część – poziom ponadpodstawowy.
7. Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
8. Kiedy udzielenie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego
rozwiązanie na później i wróć do niego, gdy zostanie Ci czas wolny.
Trudności mogą
przysporzyć Ci zadania: 15– 20, gdyż są one trudniejsze niż pozostałe. Przeznacz na ich
rozwiązanie więcej czasu.
9. Na rozwiązanie testu masz 90 min.
Powodzenia
ZESTAW ZADAŃ TESTOWYCH
I część
1. Wskaźnik stosu przechowuje:
a) adres powrotu z podprogramu,
b) adres ostatniej zajętej warstwy stosu,
c) daną ostatnio złożoną na stosie,
d) adres początku wywoływanego podprogramu.
2. Inna grupa rozkazów odnosi się do komunikacji z pamięcią, a inna do układów wejścia
wyjścia, gdy zastosowano adresację:
a) rozdzieloną,
b) jednolitą,
c) natychmiastową,
d) bezpośrednią.
3. Mikroprocesor z wielopoziomowym systemem przerwań realizuje podprogram obsługi
przerwania i w tym czasie zgłasza się inne przerwanie. Warunkiem jego przyjęcia
bezpośrednio po zakończeniu bieżącego cyklu rozkazowego jest:
a) wyższy priorytet od aktualnie obsługiwanego przerwania,
b) wyższy poziom od aktualnie obsługiwanego przerwania,
c) realizowany podprogram obsługi przerwania musi się zakończyć,
d) zgłoszenie zawsze zostanie przyjęte do obsługi.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
4. Argument operacji arytmetycznej został pobrany z pamięci programu. Jakiego trybu
adresacji użyto?
a) bezpośredniego,
b) natychmiastowego,
c) rejestrowego,
d) pośredniego.
5. Odczyt rozkazu z zewnętrznej pamięci programu jest możliwy, gdy:
a) ALE=1,
b) ALE=0,
c) EA =1,
d)
EA =0.
6. Odczyt zawartości rejestru roboczego nie jest możliwy używając adresacji:
a) natychmiastowej,
b) bezpośredniej,
c) rejestrowej,
d) rejestrowej pośredniej.
7. Mikrokontroler ma 4kB pamięci wewnętrznej programu i 32 kB pamięci zewnętrznej.
Rozkaz będzie pobrany z wewnętrznej pamięci programu jeżeli:
a) PC=1000H i EA =1,
b) PC=5000H i EA =1,
c) PC=1000H i EA =0,
d) PC=5000H i EA =0.
8. Jaka będzie zawartość licznika rozkazów po wykonaniu następujących rozkazów:
PC Rozkaz:
0000H MOV
A,#35H
0002H RRC
A
0003H JNC
10H
a) PC=0004H,
b) PC=0005H,
c) PC=0010H,
d) PC=0013H.
9. Jaka będzie szesnastkowa zawartość A i B po wykonaniu następujących rozkazów:
MOV
A,#100
MOV
B,#2
MUL
AB
a) A=64 B=2,
b) A=C8 B=0,
c) A=0 B=C8,
d) A=1 B=C8.
10. Jakie będą flagi C i Z po wykonaniu następujących rozkazów
MOV
A,#127
RL
A
INC
A
JZ
OMIN
INC
A
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
OMIN: MOV
R0,A
a) C=1 Z=1,
b) C=0 Z=1,
c) C=0 Z=0,
d) C=1 Z=0.
11. Który z rozkazów jest nieprawidłowy:
a) MOV R0,20,
b) MOV R0,#20,
c) MOV R0,R1,
d) MOV R0,A.
12. Jaka wartość zostanie zapamiętana na stosie wskutek wykonania rozkazu:
1000: LCALL 2000?
a) 1000,
b) 1003,
c) 2000,
d) 2003.
13. Dyrektywa R8 EQU 08 spowoduje:
a) wpisanie wartości 08 do rejestru R8,
b) zmianę nazwy rejestru R0 z pierwszego banku pamięci na rejestr R8,
c) wpisanie zawartości komórki 08 do rejestru R8,
d) nie spowoduje żadnego działania, ponieważ składnia dyrektywy jest nieprawidłowa.
14. Która z dyrektyw jest nieprawidłowa:
a) FLAGA DBIT ACC.0,
b) FLAGA DBIT 2,
c) FLAGA DBIT F0,
d) FLAGA DBIT 1.
II część
15. Schemat blokowy przedstawia fragment algorytmu. Zapisz go w postaci programu
w języku asemblera.
16. Napisz program, wysyłania zawartości tablicy DANE do tablicy w pamięci IRAM
od adresu 30H. Tablica DANE została określona następująco: DANE DB ‘TABLICA’
T
N
A=0
A=A-100
A=A+1
A=100
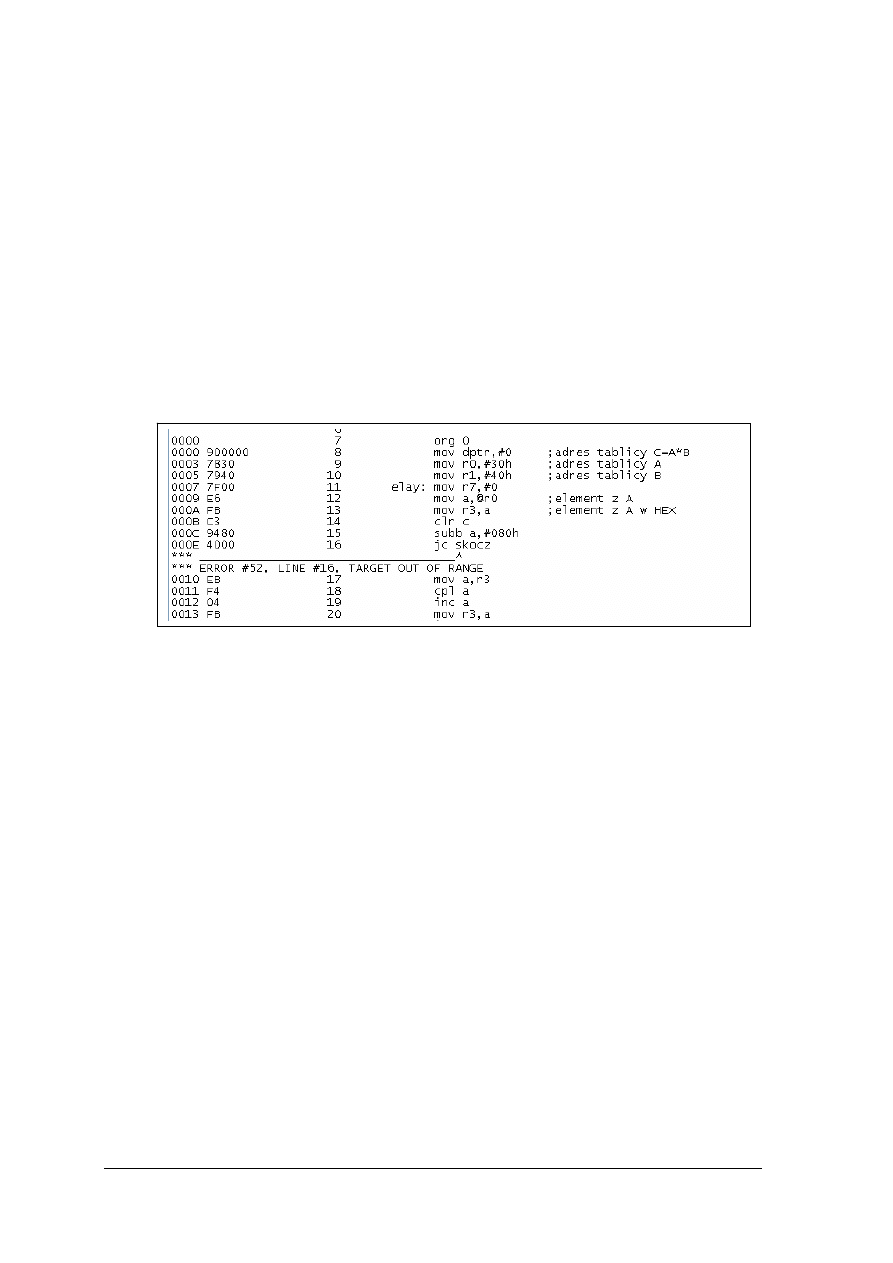
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
17. Przeanalizuj fragment programu i uzupełnij zdanie wartościami szesnastkowymi:
Po skompilowaniu programu nazwie symbolicznej DANA została nadana wartość …..H,
a SKOK ……..H Podczas wykonywania rozkazu NOP zawartość licznika rozkazów wynosi
………H, a akumulatora……..H.
DANA EQU 10
ORG 100H
MOV A,#100
SKOK: ADD A,#DANA
JNC SKOK
NOP
18. Poniżej znajduje się fragment pliku lst. Zmień ten fragment programu tak, aby usunąć
wskazany błąd kompilacji:
19. Napisz program mnożenia dwubajtowej liczby znajdującej się w rejestrach R6R7 przez
liczbę jednobajtową znajdującą się w rejestrze R5, wynik w rejestrach R2R3R4.
20. Napisz program wyzerowania 1000 komórek w pamięci XRAM począwszy od komórki
o adresie 0.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
KARTA ODPOWIEDZI
Imię i nazwisko ……………………………………………………..
Pisanie i uruchamianie programów w asemblerze
Zakreśl poprawną odpowiedź lub wpisz rozwiązania.
Nr
zadania
Odpowiedź
Punkty
1.
a b c d
2.
a b c d
3.
a b c d
4.
a b c d
5.
a b c d
6.
a b c d
7.
a b c d
8.
a b c d
9.
a b c d
10.
a b c d
11.
a b c d
12.
a b c d
13.
a b c d
14.
a b c d
15.
16.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
17.
18.
19.
20.
Razem:

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
6. LITERATURA
1. Dyrcz K., Kowalski C. T., Zarczyński Z.: Podstawy techniki mikroprocesorowej, Oficyna
Wydawnicza Politechniki Wrocławskiej, 1999.
2. Janiczek J., Stępień A.: Mikrokontroler 80(C)51/52, Wydawnictwo Elektronicznych
Zakładów Naukowych, Wrocław 1995.
3. Janiczek J., Stępień A.: Laboratorium systemów mikroprocesorowych cz. I i II,
Wydawnictwo Elektronicznych Zakładów Naukowych, Wrocław 1995.
4. Lipowski J., Małysiak H., Pochopień B., Podsiadło P., Wróbel E.: Modułowe systemy
mikrokomputerowe, Wydawnictwa Naukowo– Techniczne, Warszawa 1984.
5. Rydzewski A.: Mikrokomputery jednoukładowe rodziny MCS–51,Wydawnictwa
Naukowo– Techniczne, Warszawa 1992.
6. Starecki T.: Mikrokontrolery 8051 w praktyce, Wydawnictwo BTC, Warszawa 2000
7. http://zsk.tech.us.edu.pl.
Wyszukiwarka
Podobne podstrony:
21.1 Tablice - wprowadzenie, Programowanie, Klasa II
Programowanie w asemblerze
Blokowanie użytkownikom możliwości uruchamiania programów za pomocą atrybutów NTFS
Pisanie i stosowanie programow wsadowych
Groźna luka w Windows 7 pozwala uruchamiać programy na zablokowanym ekranie
1 Interfejs systemu Windows oraz sposoby uruchamiania programów
Programowanie w asemblerze
Mini kurs pisania programów TSR w asemblerze
Asembler Kurs Programowania Dla Srednio Zaawansowanych S Kruk www !OSIOLEK!com
Nowy Dokument programu Microsoft Word (21)
Programowanie w języku asemblera
Asembler wykład 16-10-2000, Zaczynamy (pracę) z programem Turbo Assembler, Rozdział 1
Asembler programy1
Asembler Sztuka programowania Wydanie II asesz2
21-25, pliki, Korzystanie z plików i rekordów w programach
21-25, tablice, Potrafisz już przechowywać w programie liczby całkowite, rzeczywiste, znaki i napisy
PROGRAM ZESPOŁU WYRÓWNAWCZEGO Z JĘZYKA POLSKIEGO DLA UCZNIÓW MAJĄCYCH TRUDNOŚCI W CZYTANIU I PISANI
Asembler programy4
więcej podobnych podstron