Strona 1 z 30
PAUTO, pytania z starych EGZAMINów
Dr Kramarek prowadzącym. Pytania zebranie dla Zarządzania i Inżynierii Produkcji licząc od
semestru zimowego 2011/12.
Zestaw z 1 terminu 2012
7. równanie do rozw z algebry boole'a,
8 narysować schemat włączający syrenę alarmową/ schemat syreny alarmowej z
jakimis tam elementami/,
8. charakterystyki
9.zadania z NANDami/ narysowac jakis tam uklad logiczny na sanych bramkach nand/
10. obliczenia transmitancji jakies najprostsze,
11. sterowanie bramy na samych bramkach logicznych
Strona 2 z 30
Wrzesień 2012 (12.09
9)
Strona 3 z 30
Strona 4 z 30
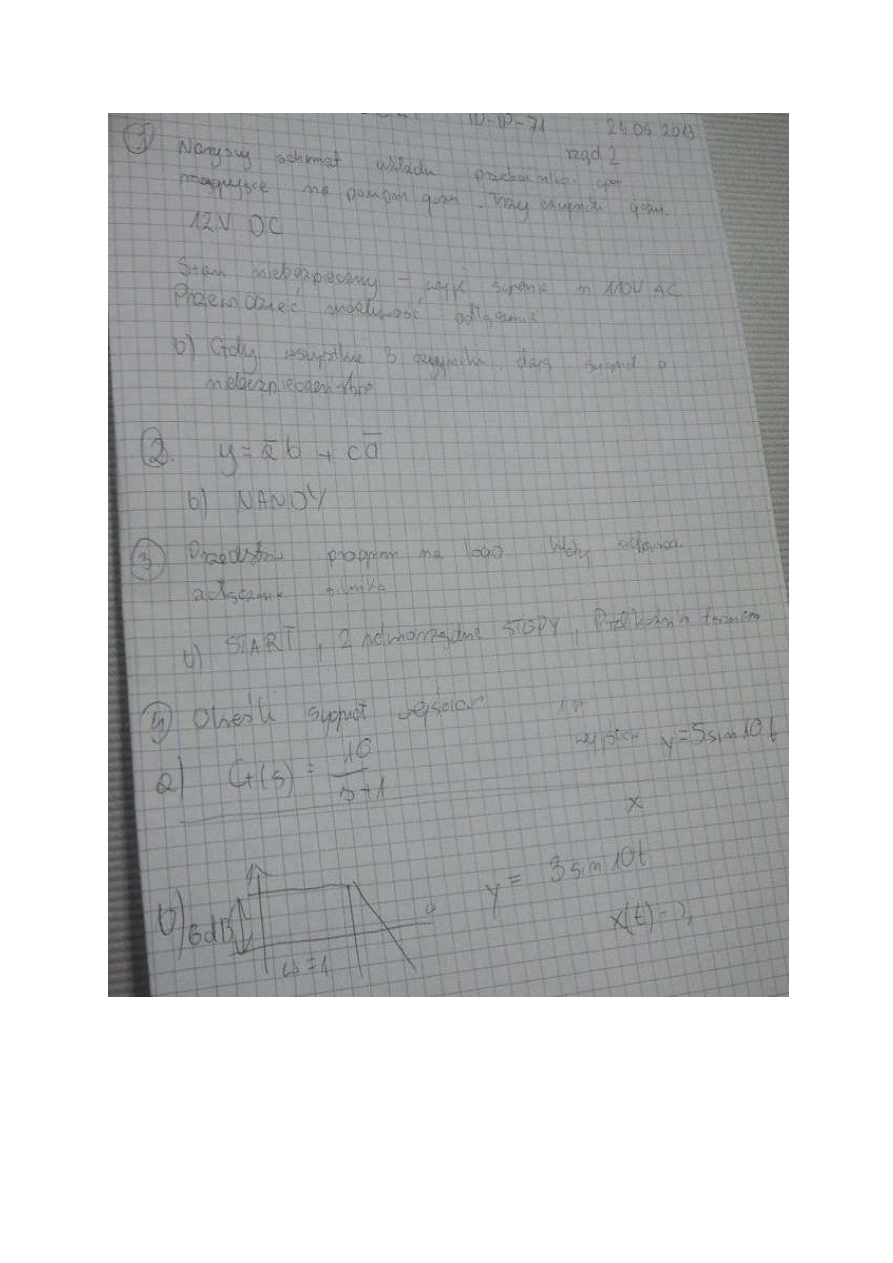
Pauto 31.01.2013
nt144
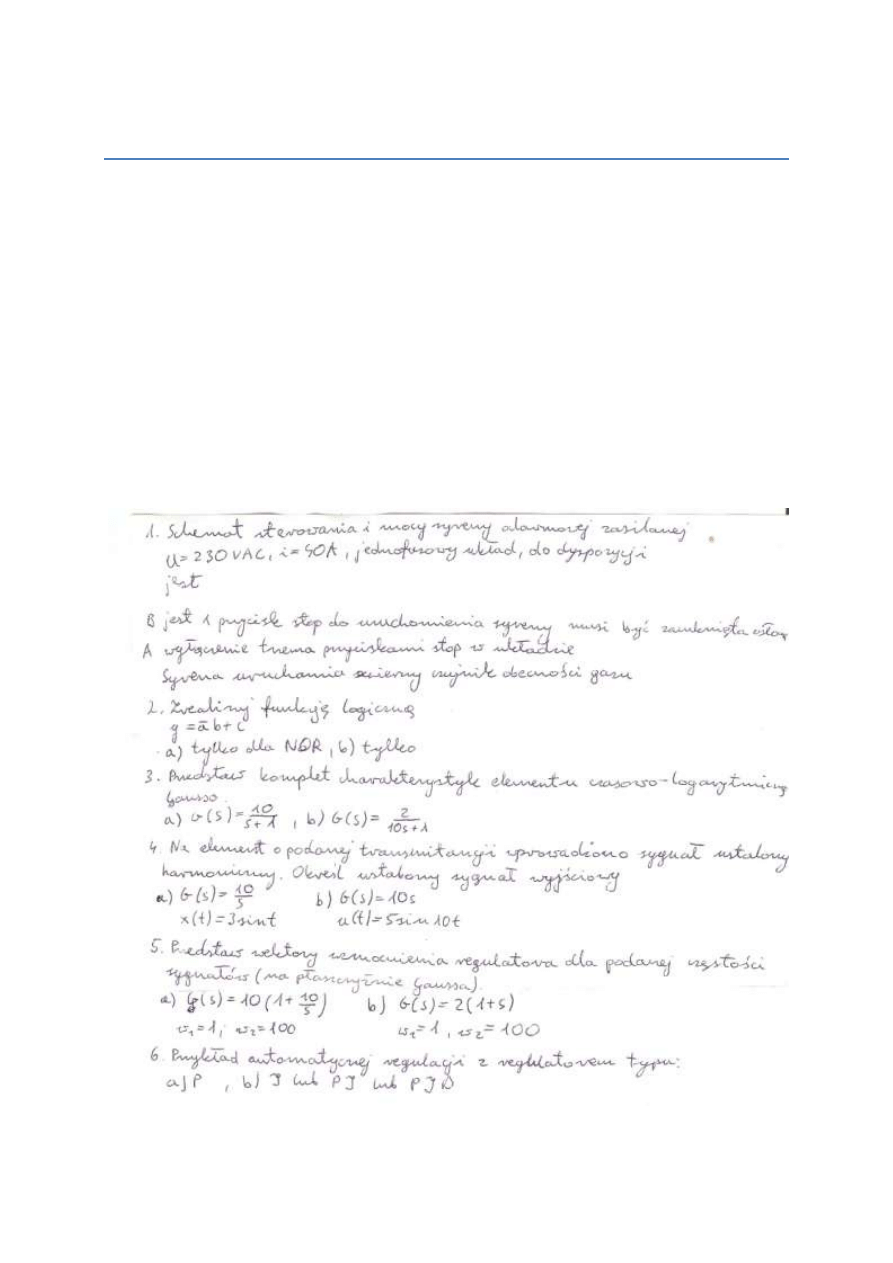
1 zrealizuj funkcję logiczną
mając do dyspozycji: A: NAND B: NOR
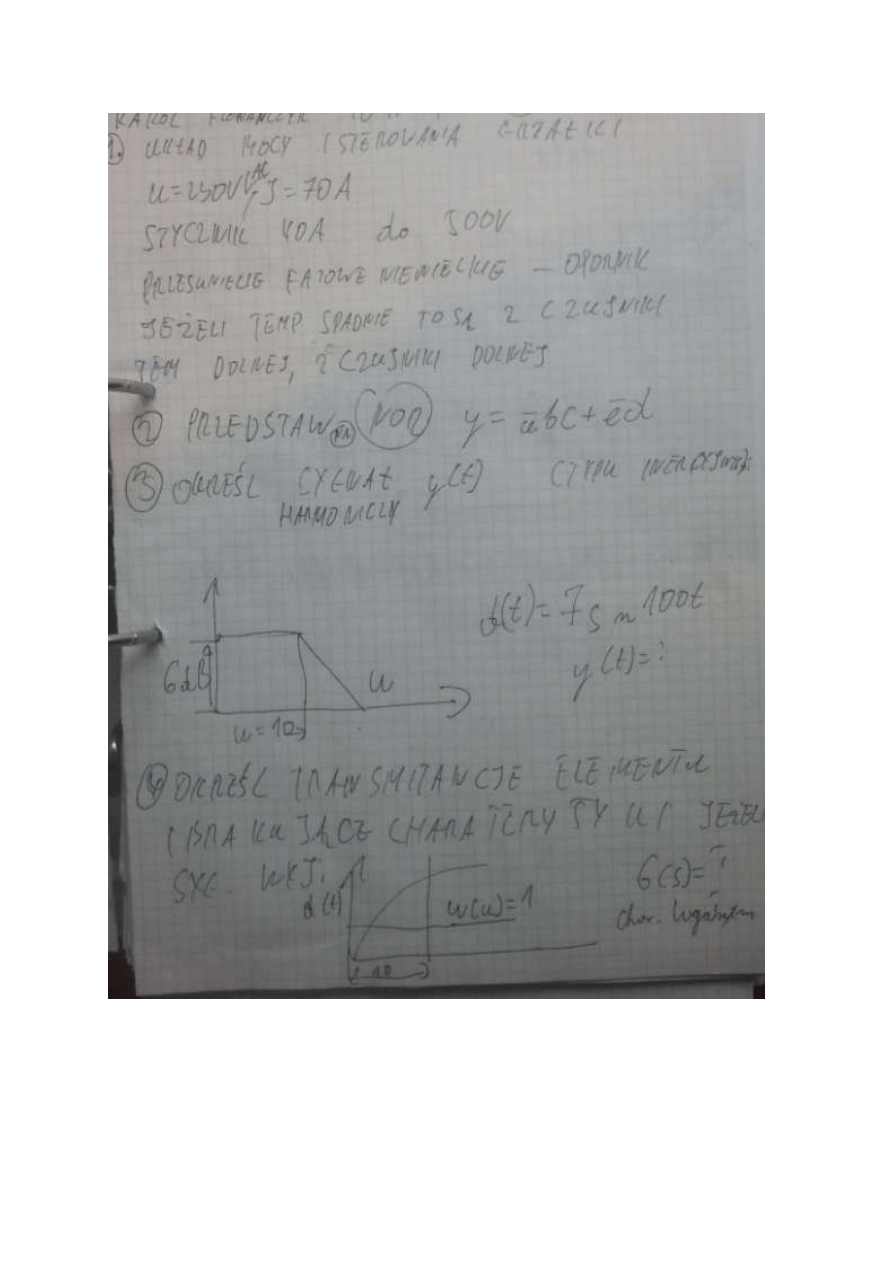
2 przedstaw układ sterowania i mocy silnika 1-fazowego DC 24V dysponując przekaźnikiem
o obciążalności prądowej 20A/styk jeśli:
A: Imax silnika ≤30A, wymagane są dwa równoważne funkcyjne przyciski stop
B: Imax silnika ≤20A, wymagane jest zamknięcie osłony w celu uruchomienia
3 zrealizuj przy pomocy PLC w języku FBD układ załączania silnika (podanie prądu na
cewkę stycznika) spełniając warunki:
A: praca możliwa tylko przy zamkniętej osłonie
B: zatrzymanie układu z trzech różnych miejsc równorzędnych
4 przedstaw sygnał wejściowy ustalony, jeśli sygnał wyjściowy y(t)=5sin10t a element ma
transmutacje
A:
B:
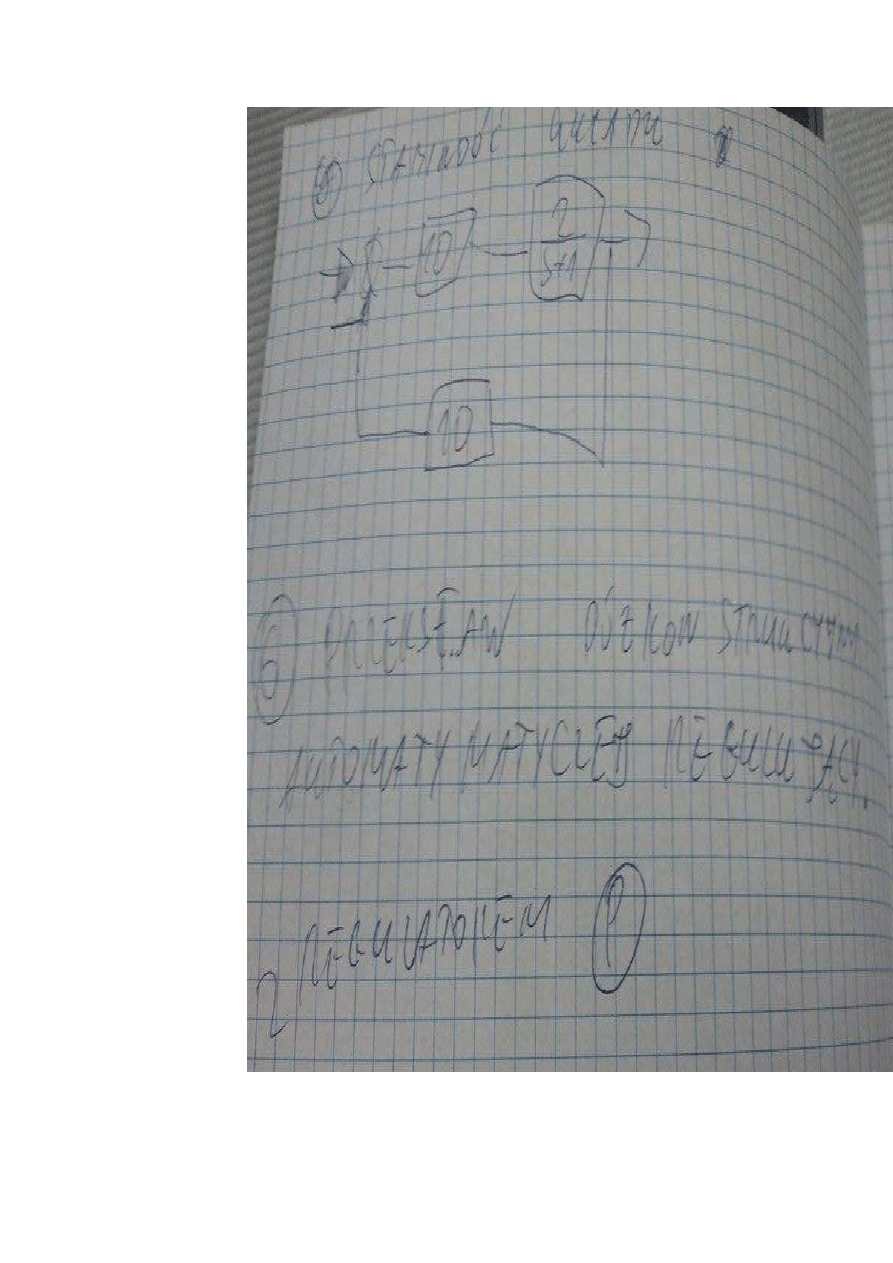
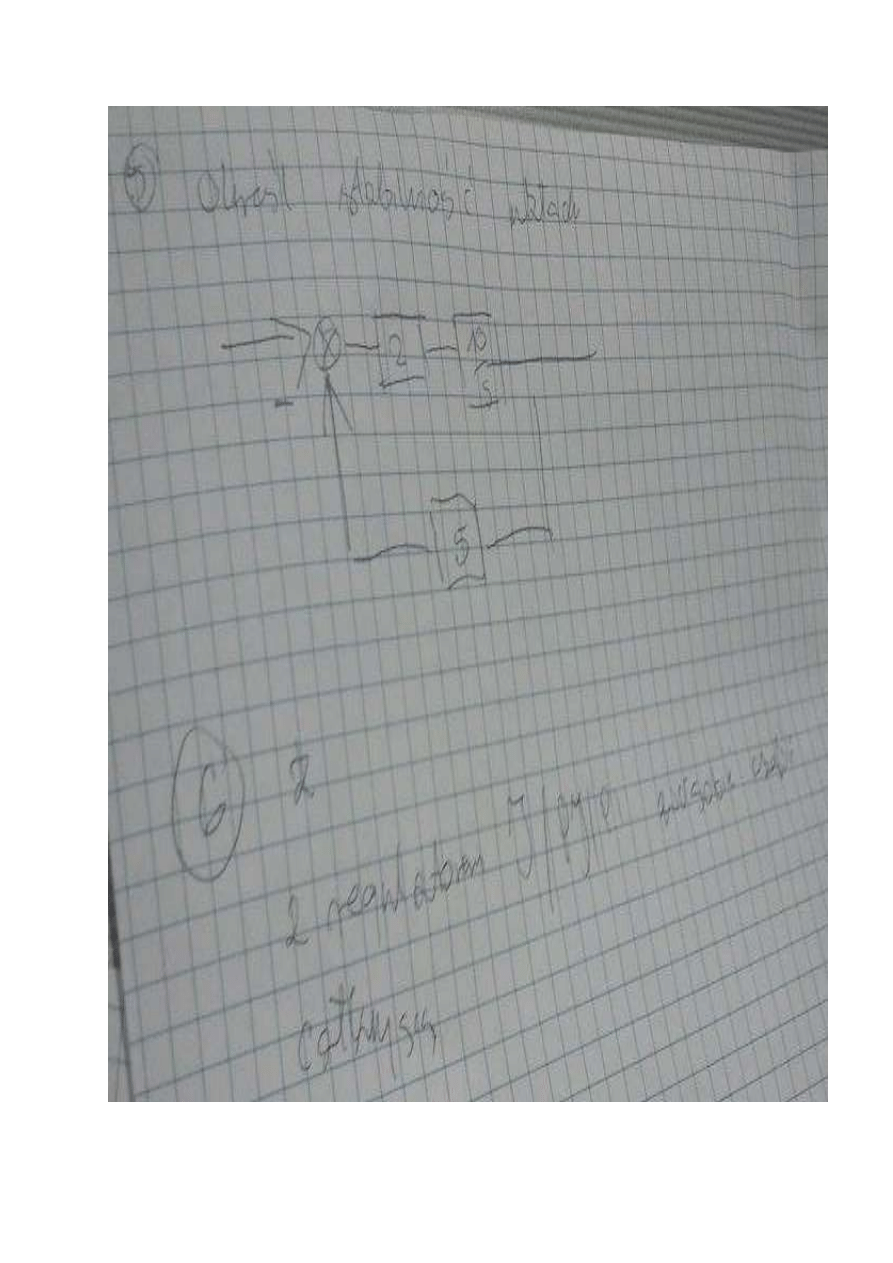
5 określ stabilność układu
A: metoda klasyczna
B: kryterium Nyquista
6 Przedstaw przykład UAR (rysunek półkonstrukcyjny) układu z regulatorem:
A: regulator P
B: regulator J lub PJ lub PJD
Strona 5 z 30
Czerwiec 2013
Strona 6 z 30
Strona 7 z 30
Strona 8 z 30
Strona 9 z 30
Strona 10 z 30
Wrzesień 2013 1 termin?
Strona 11 z 30

Strona 12 z 30
Pytania z zerówki 2014
6 pytan:
1. wyliczyc sygnal wejsciowy
2. narysowac silnik jednofazowy(jakies tam zalozenia byly)
3. przykład regulatora a) P lub b) I,PJ,PJD
4. Zrealizowac jakas funkcje na bramkach cos w stylu y=a*(nie)b*c
5. Zaprogramowac ten silnik przy pomocy PLC na FBD. silnik jednoazowy z trzema
STOPami i styk byl na 10A a przez silnik szlo wiecej niz 10 zatem dwa/tzry styczniki
6. policzyc wektor wzmocnienia
Pytania sprzed 2012 roku
ZESTAW 1
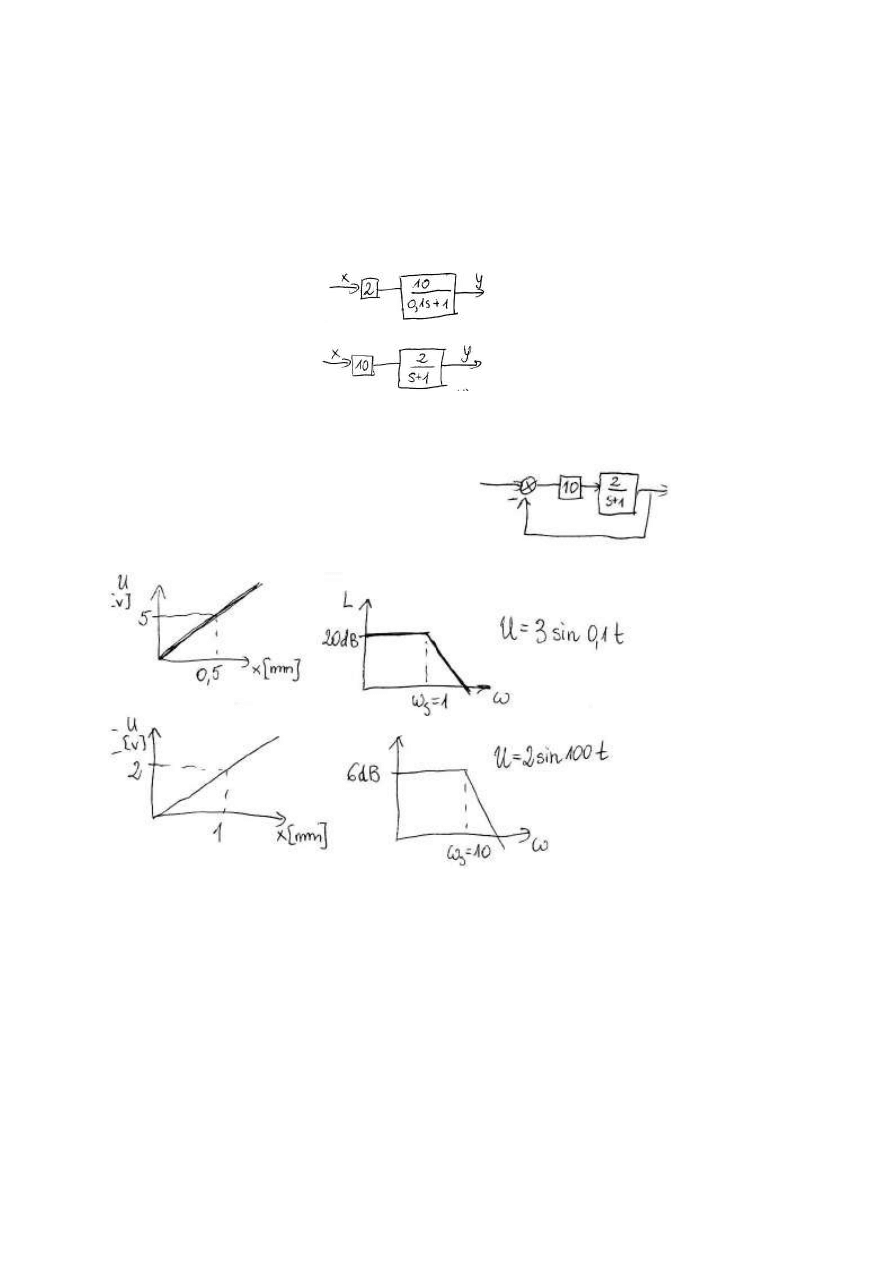
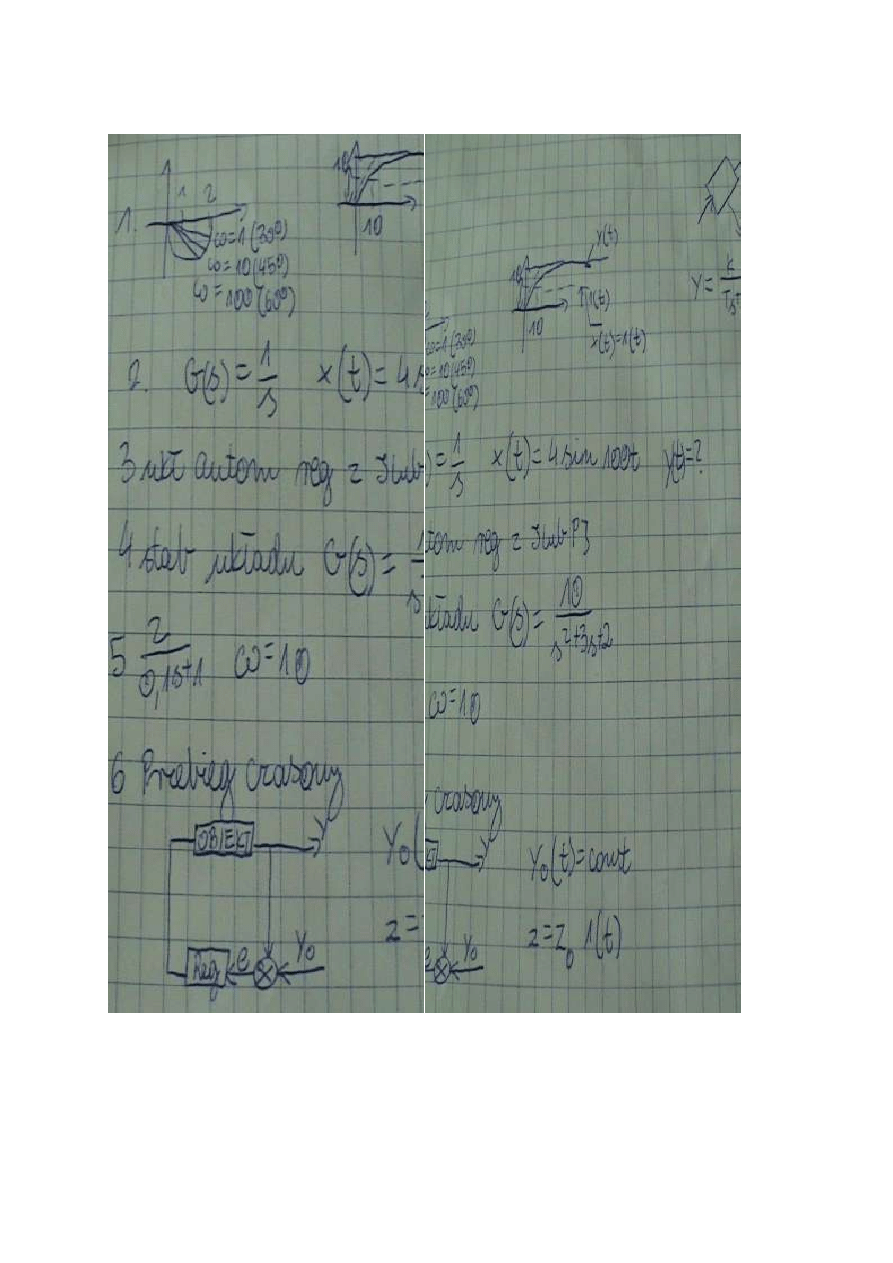
1. G1(s)=10s ; G2(s)=10/s ; x(t)=2sin10t ; y(t)=?
Nie wiem jakie polecenie... :/
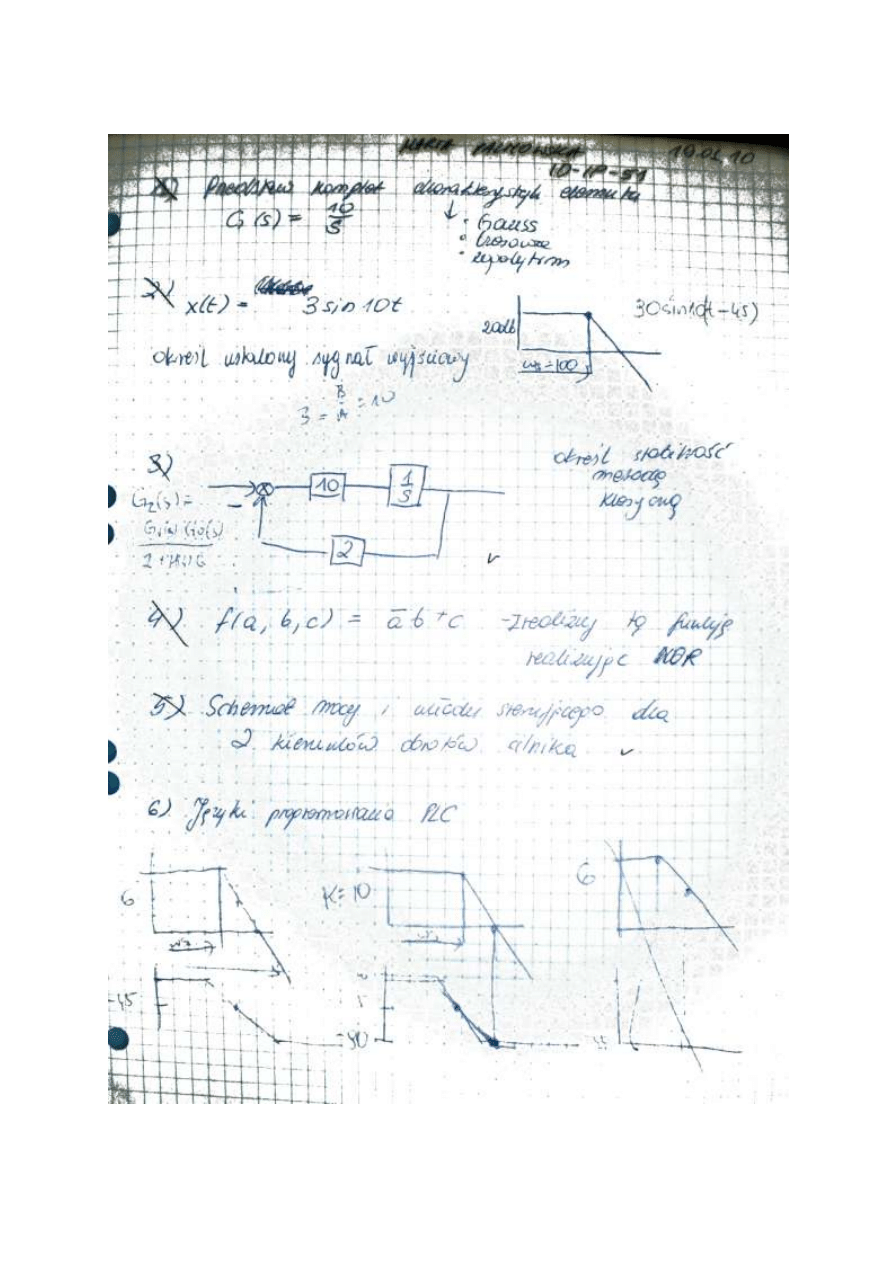
2. Przedstawić komplet charakterystyk elementu G(s)=10/(0,1s+1)
3. Określić wektor wzmocnienia G(s)=2(1+10s) dla
=0,1
4. Przestawić charakterystyki regulatora G(s)=10(1+1/s)
5. Przedstawić e(t) oraz y(t) dla regulatora PJ. Przedstawić skok zakłócenia
jednostkowego. Jak odbije się to na sygnale wyjścia i błędzie?
6. Określić, czy układ zamknięty jest stabilny G(s)=10/(s^2+3s+2) przedstawić na
płaszczyźnie Gaussa przebiegi czasowe.
7. Przedstawić y(t) i e(t) jeśli układ z regulatorem P, PJ, PD, PJD i ma skok
jednostkowy.
ZESTAW 2
1. Charakterystyki elementu różniczkującego.
2. Określić sygnał wyjściowy gdy element ma transmitancję:
G(s)=2/(s+1) x=5sin10t
3. Określić przebieg błędu e(t) przy skoku zakłóceń w zależności od zastosowanego
regulatora.
Zrobione przy 7/zestaw1
4. Narysuj charakterystyki elementu G(s)=5/s
5. Schemat mocy i sterowania przy impulsowym załączaniu silnika.
6. Granice dopuszczalne wzmocnienie serwomechanizm
Nie wiem o co chodzi...
ZESTAW 3
1. Charakterystyka elementu G(s)=20/0,1s+1
2. Charakterystyka elementu całkującego.
3. Określić sygnał wyjściowy gdy:
x(t)=5sin(0,1t) G(s)=s
4. Klasyczna metoda sprawdzania stabilności (metoda pierwiastków)
5. Układ mocy i sterowania silnika elektrycznego z 2 kierunkami obrotów.
6. Układy funkcjonalnie pełne
Co to jest....?
Strona 13 z 30
ZESTAW 4
ZESTAW 5
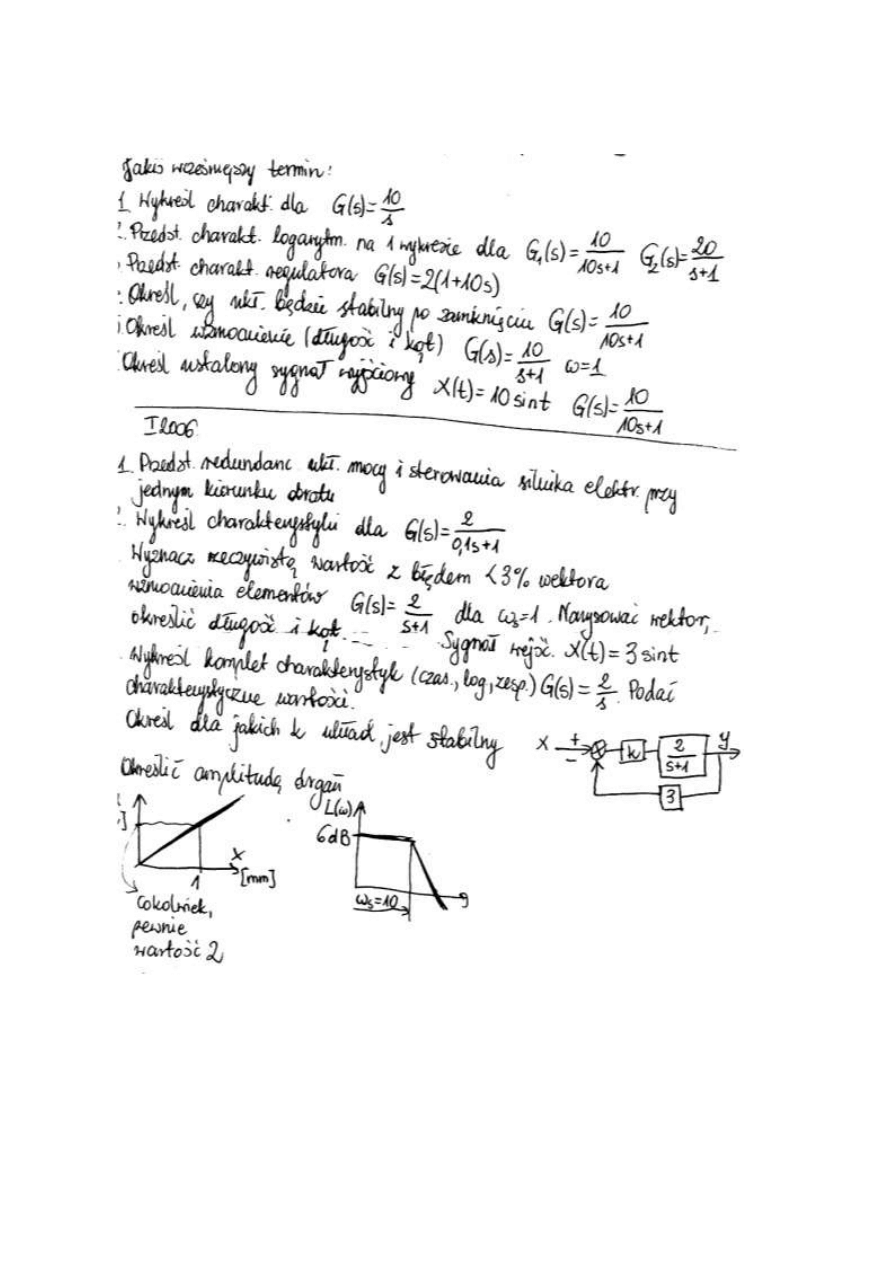
1. Przedstaw redundancję układu mocy i sterowania silnika elektrycznego przy jednym
kierunku obrotu.
Co to redundancja?
2. Wykreśl charakterystyki dla G(s)=2/(0,1s+1)
3. Wyznacz rzeczywistą wartość z błędem <3% wektora wzmocnienia elementów
G(s)=2/(s+1) dla
s
=1. Narysować wektor, określić długość i kąt. Sygnał wejścia
x(t)=3sint
Nie wiem jak wyznaczyć tą rzeczywistą wartość z błędem 3%.
4. Wykreśl komplet charakterystyk G(s)=2/s. Podać charakterystyczne wartości.
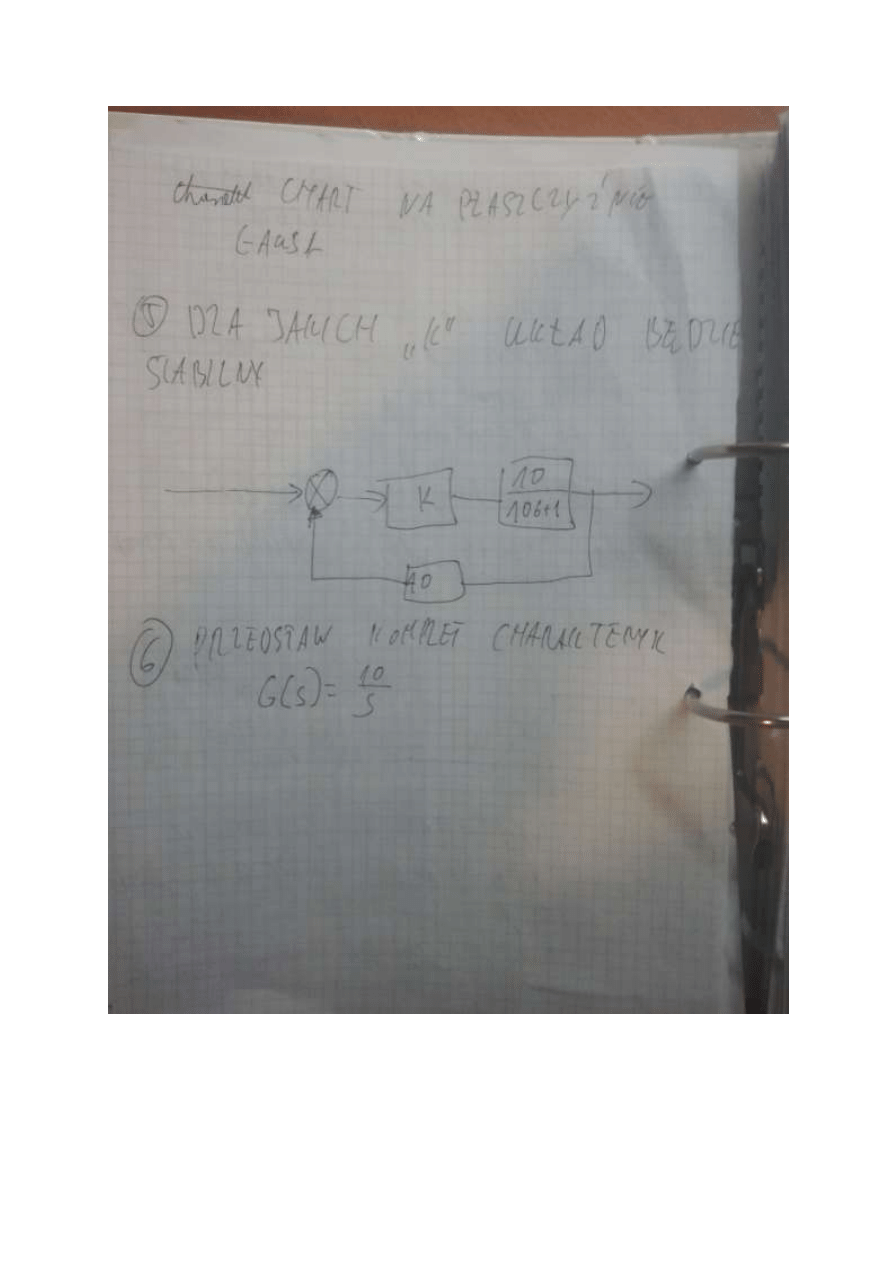
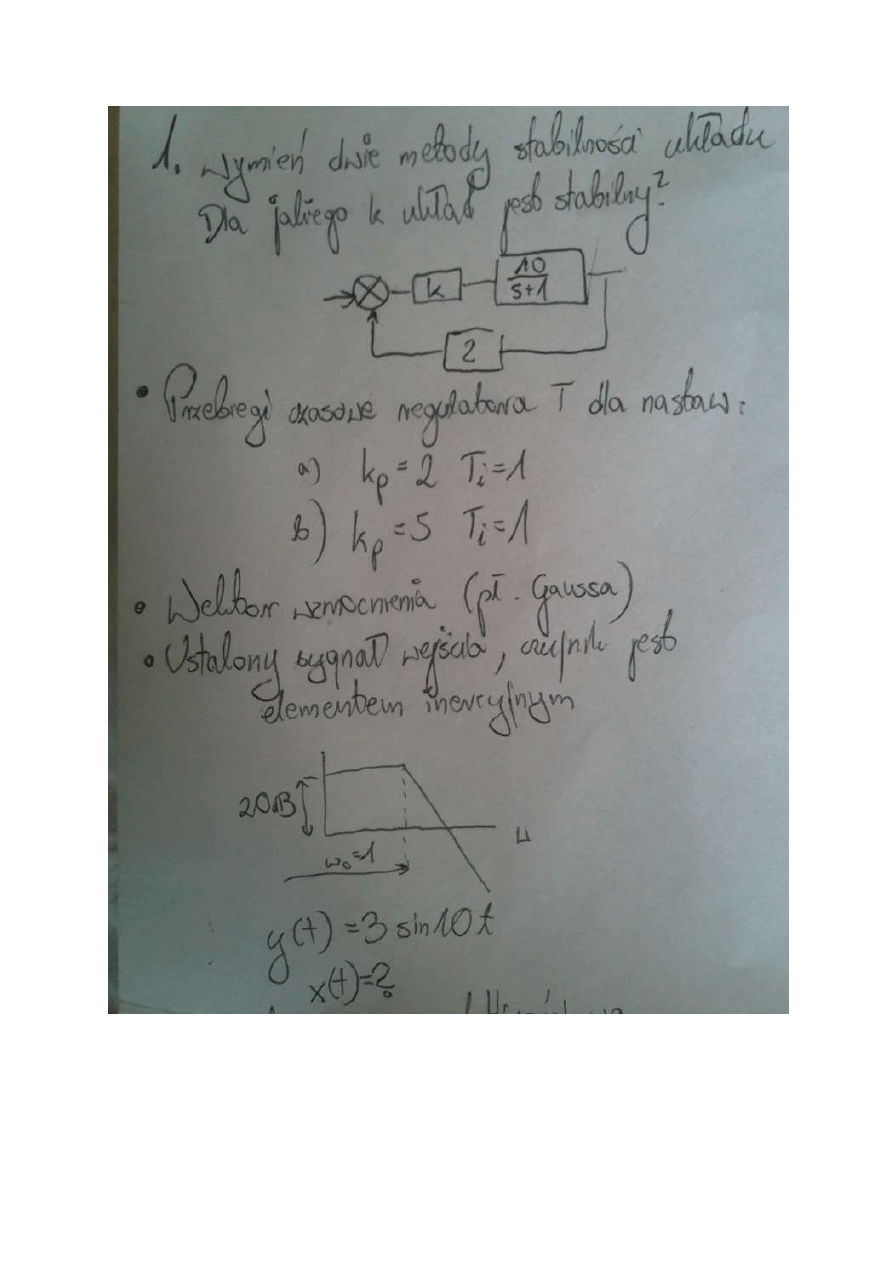
5. Określić dla jakich k układ jest stabilny?
6. Określić amplitudę drgań
Strona 14 z 30
ZESTAW 6
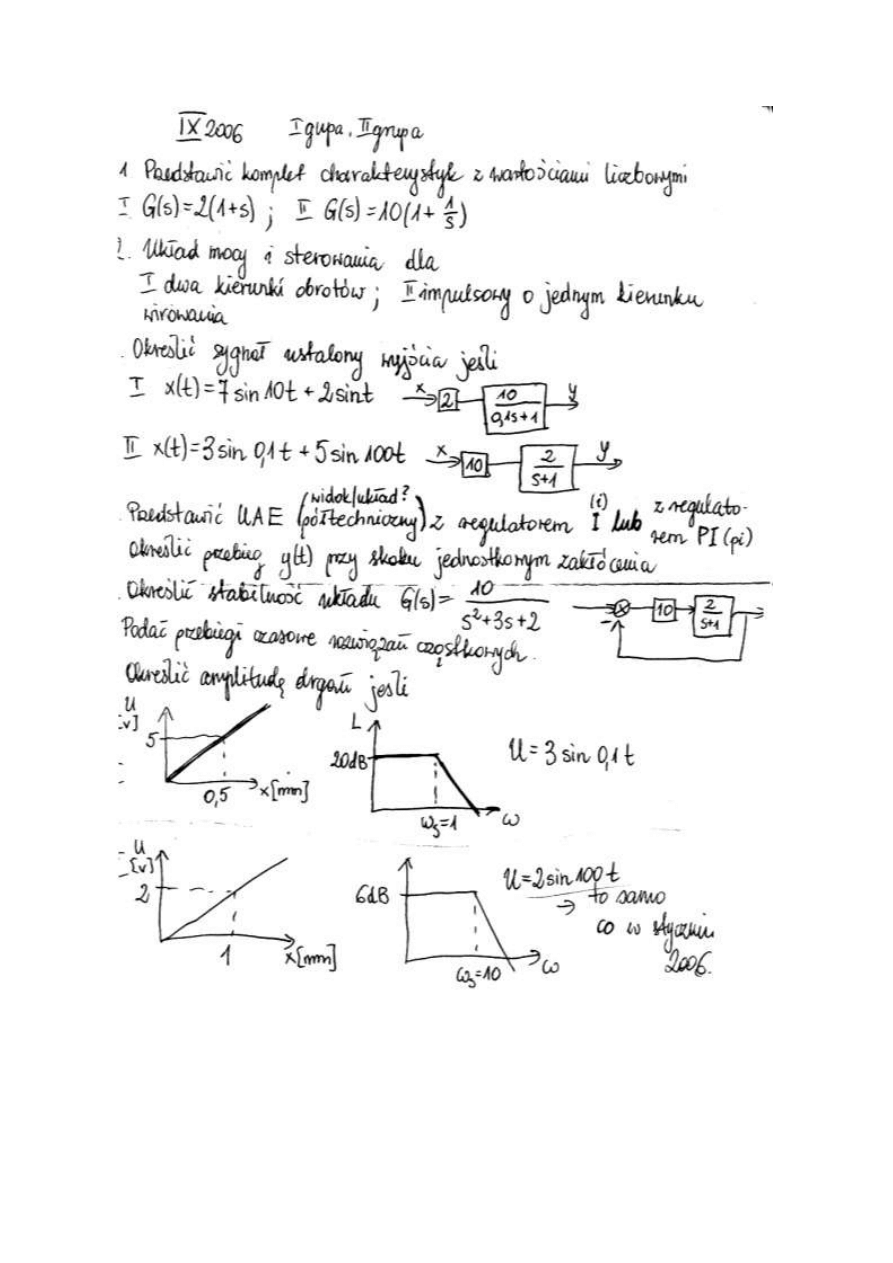
1. Przedstawić komplet charakterystyk z wartościami liczbowymi
I G(s)=2(1+s)
,
II G(s)=10(1+1/s)
2. Układ mocy i sterowania dla:
I dwa kierunki obrotów,
II impulsowy o jednym kierunku wirowania
3. Określ sygnał ustalony wyjścia, jeśli:
I x(t)=7sin10t + 2sint
II x(t)=3sin0,1t + 5sin100t
4. Przedstawić UAR (widok/układ półtechniczny) z regulatorem I lub regulatorem PI.
Określić przebieg y(t) przy skoku jednostkowym zakłócenia.
5. Określić stabilność układu G(s)=10/(s
2
+3s+2)
Podać przebiegi czasowe rozwiązań
cząstkowych.
6. Określić amplitudę drgań, jeśli:
ZESTAW 7
wyznaczyć sygnał wyjścia y(t) mając G(s) i podany x(t) lub odczytując dane z wykresu
Zbudować bramkę z samych norów lub z samych nandów z podanej funkcji
Języki programowania PLC
Opisać człony G(s) charakterystyką czasową i gaussa
Schemat mocy trójkąta i gwiazdy (czy coś takiego) i krótko opisać
Strona 15 z 30
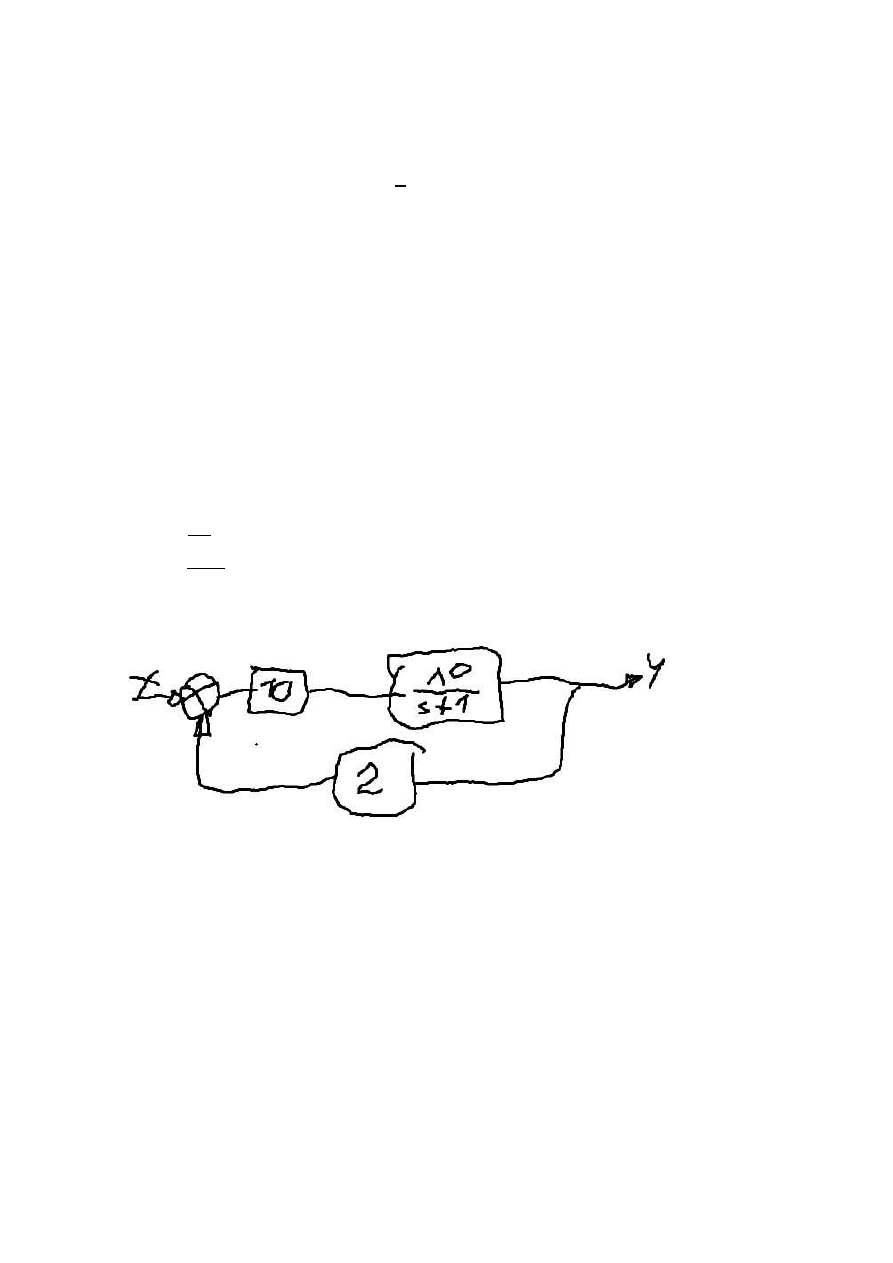
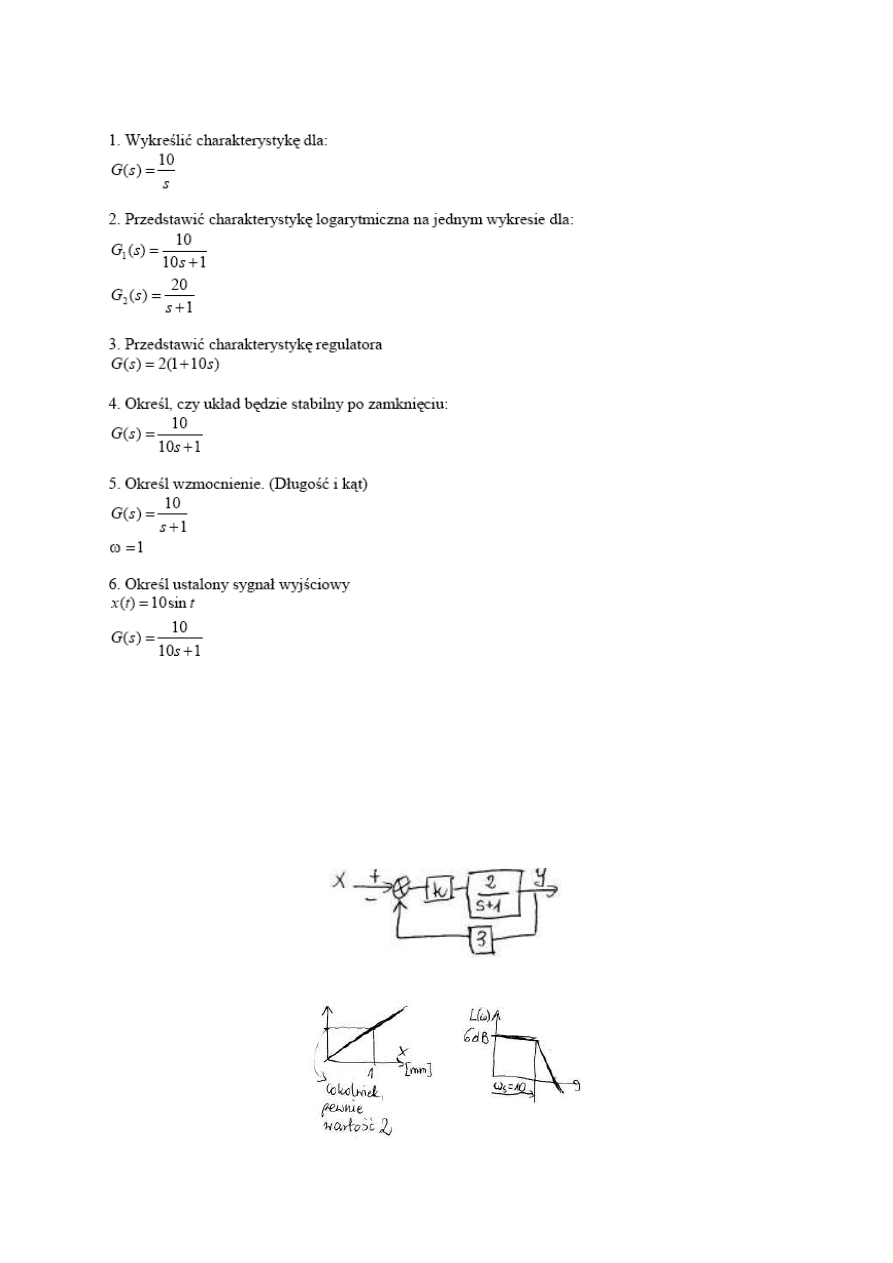
Wyznaczyć k z podanego połączenia (to było zadanie na transmitancję zastępczą ze
sprzężeniem zwrotnym, jest podobno specjalny wzór ktory liczy k. rysunek: połaczenie
szeregowe k i 1/s i to wszystko połączone równolegle z 10).
Strona 16 z 30
Strona 17 z 30
Strona 18 z 30
Strona 19 z 30
Te chyba są zawarte we wcześniejszych pytaniach :P
Strona 20 z 30
Strona 21 z 30
Strona 22 z 30
Strona 23 z 30
Strona 24 z 30
Klasyki
Zestaw 1
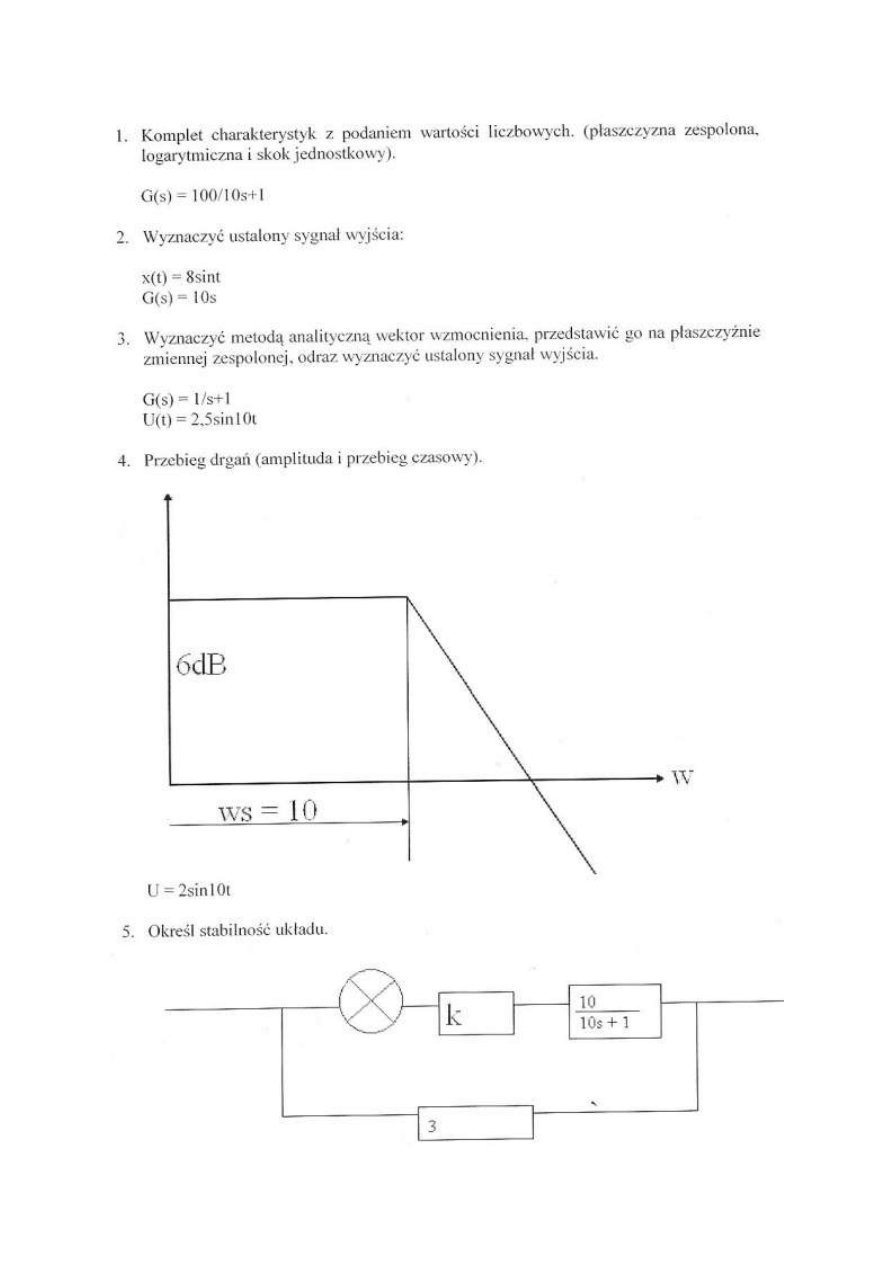
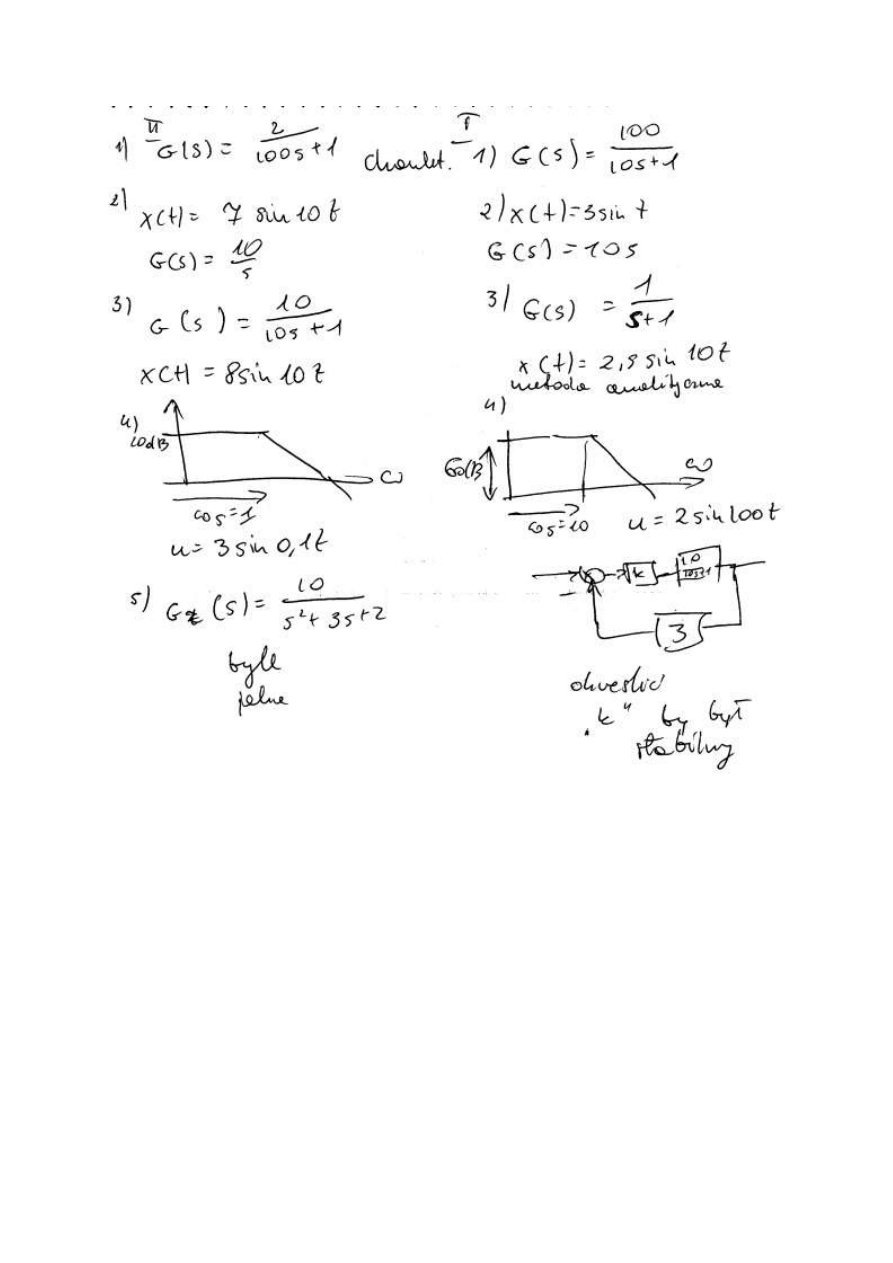
1. Komplet charakterystyk z podaniem wartości liczbowych. (płaszczyzna zespolona,
logarytmiczna i skok jednostkowy).
G(s) = 100/10s+1
2. Wyznaczyć ustalony sygnał wyjścia:
x(t) = 8sint
G(s) = 10s
3. Wyznaczyć metodą analityczną wektor wzmocnienia, przedstawić go na płaszczyźnie
zmiennej zespolonej, odraz wyznaczyć ustalony sygnał wyjścia.
G(s) = 1/s+1
U(t) = 2,5sin10t
4. Przebieg drgań (amplituda i przebieg czasowy).
U = 2sin10t
Strona 25 z 30
5. Określ stabilność układu.
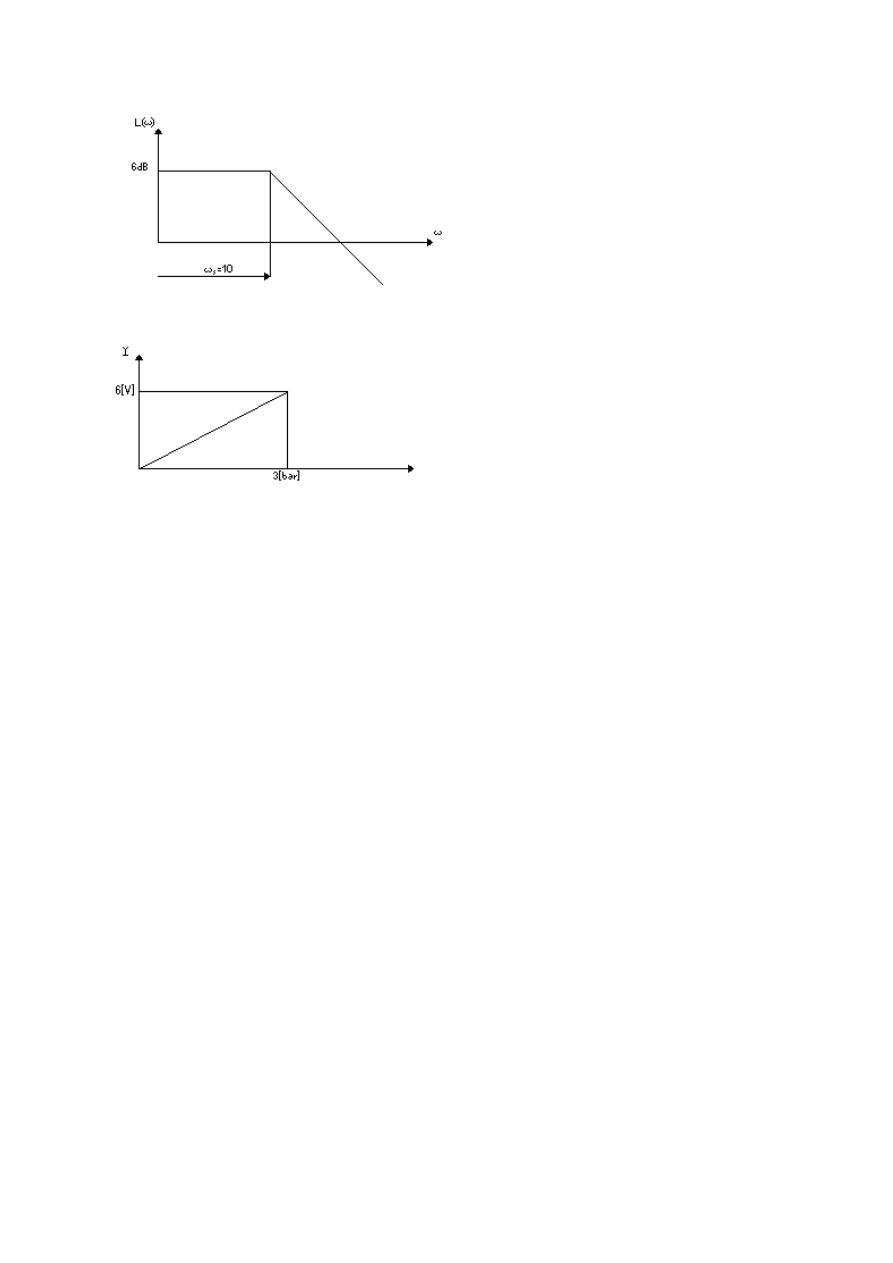
Zestaw 2
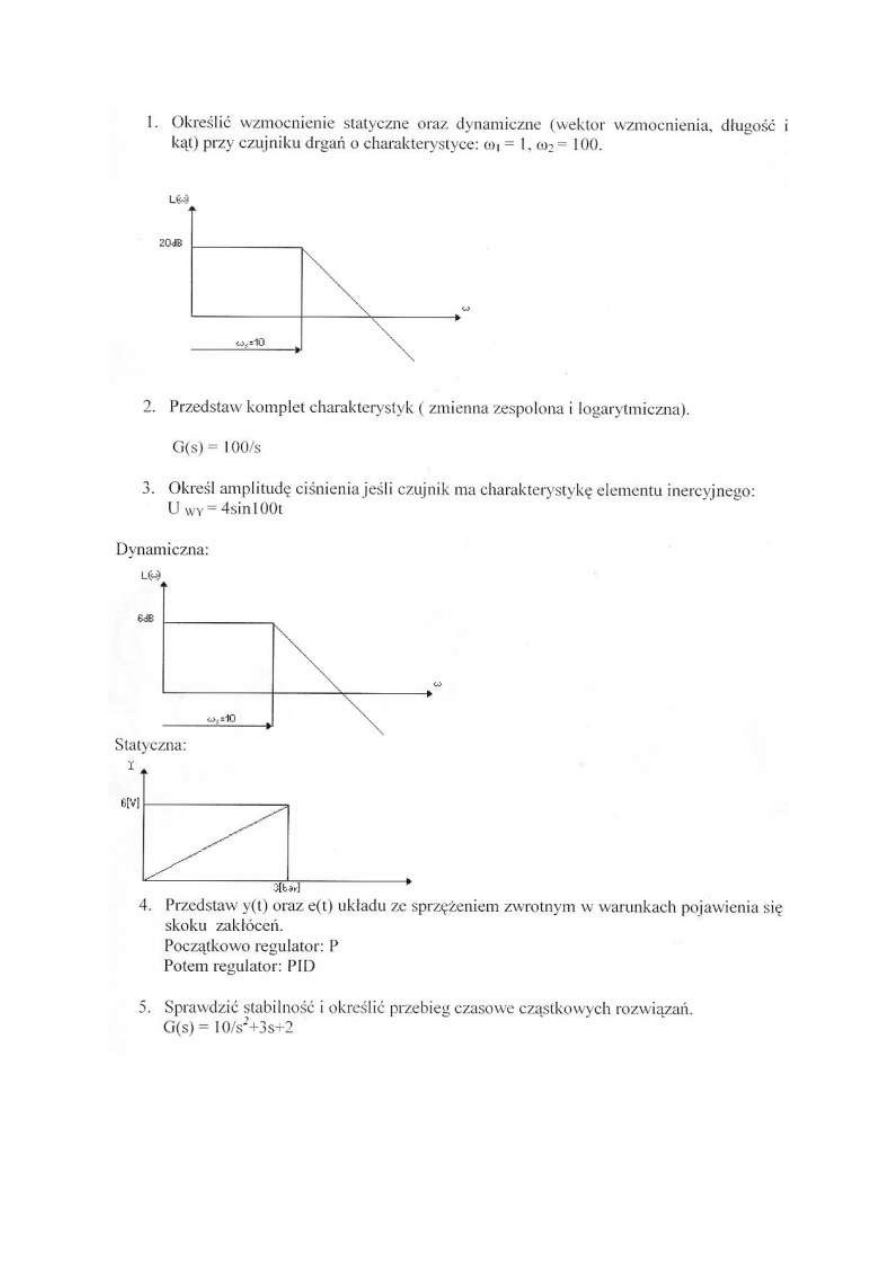
1. Określić wzmocnienie statyczne oraz dynamiczne (wektor wzmocnienia, długość i
kąt) przy czujniku drgań o charakterystyce: ω
1
= 1, ω
2
= 100.
2. Przedstaw komplet charakterystyk ( zmienna zespolona i logarytmiczna).
G(s) = 100/s
3. Określ amplitudę ciśnienia jeśli czujnik ma charakterystykę elementu inercyjnego:
U
WY
= 4sin100t
Dynamiczna:
Strona 26 z 30
Statyczna:
4. Przedstaw y(t) oraz e(t) układu ze sprzężeniem zwrotnym w warunkach pojawienia się
skoku zakłóceń.
Początkowo regulator: P
Potem regulator: PID
5. Sprawdzić stabilność i określić przebieg czasowe cząstkowych rozwiązań.
G(s) = 10/s
2
+3s+2
Strona 27 z 30
Pytania z pulpitu
Strona 28 z 30
Strona 29 z 30
Egzamin z 10.01.2010
Strona 30 z 30
Zerówka z24.01.2005
Wyszukiwarka
Podobne podstrony:
PAUTO, pytania z EGZAMINów
Pytania egzaminacyjneIM
prawo opracowane pytania egzamin id 3
StacjonarneBAT pytania egzamin2013-KW, Uczelnia PWR Technologia Chemiczna, Semestr 6, BAT-y egzamin
Pytania egzaminacyjne z Agrometeorologii, Szkoła Rolnictwo studia, Szkoła, Materiały studia, Agromet
Pytania egzaminacyjne - Psychologia osobowości - 5, Psychologia, Psychologia egzaminacyjna
OSP Pytania egzaminacyjne, BHP i PPOŻ przygotowanie do szkoleń, PPOŻ
PYTANIA Z EGZAMINU!!!!!, MEDYCYNA, PATOLOGIA, EGZAMIN NOTATKI, PYTANIA, pato chomik testy
Marketing polityczny pytania egzamin 2008, Studia, Psychologia, SWPS, 3 rok, Semestr 05 (zima), Psyc
egz fizjo, II ROK STOMATOLOGIA SUM ZABRZE, FIZJOLOGIA, FIZJOLOGIA EGZAMIN, foldery z pytaniami, egza
Pytania egzaminacyjne 2011, uczelnia, Podstawy finansów wykłady
PYTANIA EGZAMINACYJNE 2, WSFiZ, semestr IX, Negocjacje jako sposób porozumiewania się w życiu społec
Pytania-z-egzaminu-z-czwartorzedu-sciaga-na-dlugopis, Studia, Czwartorzęd
więcej podobnych podstron