Charakterystyki mechaniczne
i rodzaje pracy
Obok takich parametrów, jak wartoæ k¹ta
skoku podstawowego, maksymalny moment
statyczny oraz maksymalny moment rozru-
chowy, napiêcie zasilania i znamionowy, usta-
lony pr¹d pasma uzwojenia, najwa¿niejsze
z punktu widzenia u¿ytkownika s¹ charaktery-
styki mechaniczne, czyli zale¿noæ momentu
elektromagnetycznego rozwijanego przez sil-
nik od redniej prêdkoci wirowania wirnika.
Prêdkoæ ta jest wprost proporcjonalna do
czêstotliwoci impulsów steruj¹cych, odwrot-
nie proporcjonalna do liczby taktów komuta-
cji w cyklu i zale¿y od typu silnika skokowego:
dla silnika o wirniku z magnesem trwa³ym bê-
dzie n = 60f/kp obr/min, a dla silnika o wirniku
reluktancyjnym bêdzie n = 60f/kZ
r
obr/min.
Charakterystyki mechaniczne bardzo silnie za-
le¿¹ od typu silnika i zasilacza oraz od rodza-
ju komutacji i sposobu sterowania. Na rys. 17
przedstawiono czêsto spotykany przebieg cha-
rakterystyk mechanicznych. Krzywa A zwa-
na charakterystyk¹ momentu rozruchowego
wyznacza wartoci graniczne momentu ob-
ci¹¿enia, dla których mo¿liwe jest przejcie od
stanu pracy statycznej do stanu pracy kinema-
tycznej ustalonej, w wyniku skokowego wzro-
stu czêstotliwoci impulsów steruj¹cych od ze-
ra (praca statyczna) do zadanej wartoci, bez
zgubienia czy nadrobienia skoku. Punkty prze-
ciêcia siê charakterystyki z osiami rzêdnych
i odciêtych wyznaczaj¹ odpowiednio: maksy-
malny moment rozruchowy (w stanie statycz-
nym): T
roz max
i maksymaln¹ czêstotliwoæ
przy rozruchu (w stanie ja³owym): f
roz max
.
Zwiêkszaj¹c np. p³ynnie i dostatecznie wolno
czêstotliwoæ impulsów steruj¹cych (przy usta-
lonym obci¹¿eniu), mo¿na silnik rozpêdziæ do
wiêkszych prêdkoci ni¿ wynikaj¹ce z prze-
biegu krzywej A. Graniczne mo¿liwoci silnika,
przy takim postêpowaniu, wyznacza przebieg
krzywej B, zwanej graniczn¹ charakterystyk¹
momentu. Punkt przeciêcia siê tej krzywej
z osi¹ odciêtych wyznacza maksymaln¹ czê-
stotliwoæ pracy f
pr max
. Miêdzy krzywymi
Ai B rozci¹ga siê obszar pracy przyspieszonej,
w którym silnik nad¹¿a za wystarczaj¹co wol-
nymi zmianami czêstotliwoci impulsów steru-
j¹cych lub obci¹¿enia, ale nie realizuje rozruchu,
SILNIKI SKOKOWE
(4)
nawrotu, a tak¿e nie zatrzyma siê bez wybie-
gu. Na zewn¹trz obszaru ograniczonego krzy-
w¹ B silnik wypada z synchronizmu z impulsa-
mi steruj¹cymi i zatrzymuje siê.
Uwaga:
Wszystkie podawane w katalogach charak-
terystyki mechaniczne dotycz¹ nie tylko kon-
kretnego typu silnika, ale tak¿e konkretnego ro-
dzaju sterownika i konkretnej (zwykle nie po-
dawanej) procedury sterowania.
Przy pracy silnika skokowego w uk³adzie na-
pêdowym mog¹ pojawiæ siê mechaniczne
drgania rezonansowe. Rezonans podstawowy
wyst¹pi wówczas, gdy czêstotliwoæ impul-
sów steruj¹cych jest zbli¿ona do czêstotliwo-
ci drgañ w³asnych uk³adu napêdowego. Zja-
wisko rezonansu mo¿e te¿ wyst¹piæ przy czê-
stotliwociach wielokrotnie ni¿szych (rezonans
podharmoniczny) i wielokrotnie wy¿szych (re-
zonans parametryczny). Wystêpowanie rezo-
nansu powoduje, ¿e silnik mo¿e straciæ stero-
walnoæ, jeli t³umienie w uk³adzie zw³a-
szcza typu tarcia lepkiego jest niewystar-
czaj¹ce. Jeli w procesie sterowania nie prze-
widziano odpowiedniej procedury t³umienia
drgañ lub omijania strefy rezonansowej, to
praca silnika, szczególnie w zakresie rezo-
nansu podstawowego, nie jest zalecana, gdy¿
grozi wypadniêciem silnika z synchronizmu.
Rozró¿nia siê nastêpuj¹ce stany pracy silników
skokowych:
q
praca statyczna, w której komutacja jest
przerwana, a pr¹dy w zasilanych pasmach
maj¹ wartoci ustalone (patrz charakterystyka
k¹tow¹ momentu rys.10);
q
praca quasi-statyczna, zwana te¿ prac¹
start-stopow¹, ma miejsce wówczas, gdy czê-
stotliwoæ wykonywania przez wirnik kolej-
nych skoków jest na tyle ma³a, ¿e ka¿dy kolej-
ny skok odbywa siê ze stanu statycznego (za-
trzymanego);
q
praca kinematyczna ustalona wystêpuje
wtedy, gdy silnik jest sterowany impulsami
o sta³ej czêstotliwoci, a prêdkoæ chwilowa wir-
nika jest prawie równomierna;
q
praca dynamiczna, to praca w stanach
przejciowych takich jak: rozruch, hamowa-
nie i nawrót; dla wszystkich odmian silników
skokowych zachodzi nastêpuj¹ca relacja miê-
dzy czêstotliwociami w zakresie pracy dyna-
micznej: f
pr
> f
roz
> f
ham
>f
naw
.
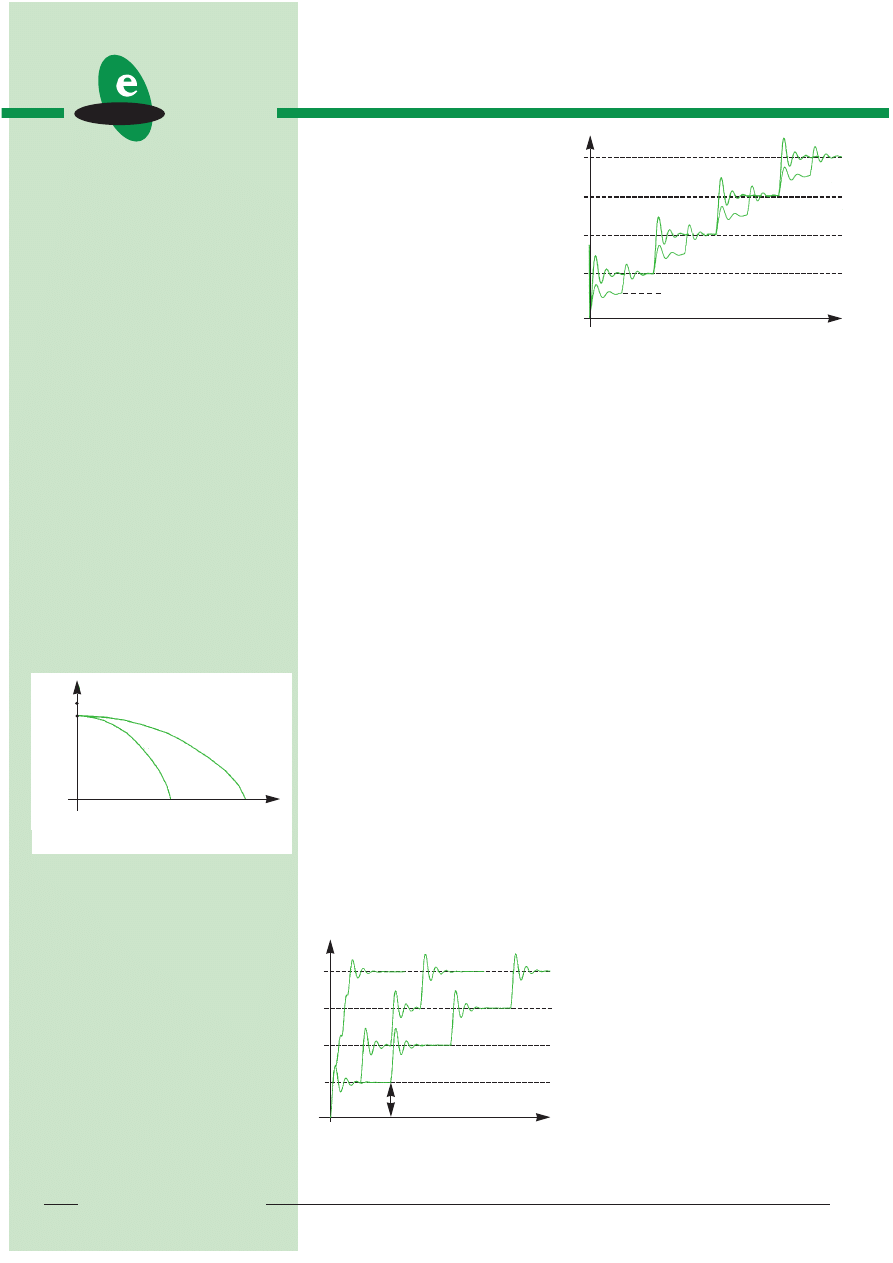
Na rys. 18 przedstawiono przyk³adowe przebie-
gi drogi k¹towej silnika skokowego dla czterech
impulsów steruj¹cych. Dla przebiegu 2 czê-
stotliwoæ impulsów by³a dwa razy wiêksza,
a dla przebiegu 3 dziesiêæ razy wiêksza od
czêstotliwoci dla przebiegu 1. Natomiast na
rys. 19 przedstawiono porównanie pracy pe³no-
skokowej z prac¹ pó³skokow¹ niesymetryczn¹.
Silniki skokowe produkowane
w Polsce
Obecnie w Polsce silniki skokowe ogólnie do-
stêpne, produkowane s¹ jedynie przez firmê
Mikroma. S¹ to silniki reluktancyjne, cztero-
pasmowe o skoku podstawowym 15
o
, silniki
z magnesem trwa³ym namagnesowanym wie-
lobiegunowo na wirniku, czteropasmowe o sko-
ku podstawowym 7,5
o
oraz silniki o wirniku hy-
brydowym, czteropasmowe o skoku podstawo-
wym 3,6
o
i 1,8
o
, a tak¿e piêciopasmowe o sko-
ku podstawowym 0,72
o
. Zakres napiêæ zasi-
laj¹cych od 1,9 do 28 V, a maksymalny mo-
ment elektromagnetyczny mieci siê
w przedziale od 24 do 1800 mN.m przy masie
silników od 0,15 do 2,5 kg. Maksymalna czê-
stotliwoæ rozruchu wynosi ok. 270
÷
700 Hz,
a maksymalna czêstotliwoæ pracy ok.
330
÷
1800 Hz.
Nale¿y pamiêtaæ, ¿e przy doborze silnika na-
le¿y korzystaæ z firmowych katalogów produ-
centa i zwracaæ uwagê dla jakiego typu ste-
rownika producent gwarantuje podawane pa-
rametry.
n
Andrzej Pochanke
L I T E R A T U R A
[1] Acarney P.P.: Stepping motors: a guide to modern the-
ory and practice. Peter Peregrinus, London 1992.
[2] Iwobotienko B.A. i inni: Dyskretne napêdy elektrycz-
ne z silnikami skokowymi. WNT, Warszawa 1975.
[3] Kenjo TT., Sugawara A.: Stepping motors and their
microprocessor controls. Clarendon Press, Oxford 1994.
[4] Owczarek J., Pochanke A., Sochocki R.: Elektrycz-
ne maszynowe elementy automatyki. WNT, Warszawa
1983.
[5] Sochocki R.: Mikromaszyny elektryczne. OWPW,
Warszawa 1996.
[6] Wróbel T.: Silniki skokowe. WNT, Warszawa 1993.
Radioelektronik Audio-HiFi-Video 11/2003
T
e
A
B
n
0
f
T
emax
T
eroz max
f
roz max
f
pr max
Rys. 17. Charakterystyki mechaniczne
silnika skokowego
Rys. 18. Przyk³adowe przebiegi drogi k¹towej
silnika skokowego dla impulsów steruj¹cych
o ró¿nej czêstotliwoci
0
ϑ
Czas
3 2 1
Skok podstawowy
↔
↔
0
1/2 skoku
Czas
Rys. 19. Porównanie pracy pe³noskokowej
z prac¹ pó³skokow¹
Wyszukiwarka
Podobne podstrony:
FGAG explained 2003 11 17 de
FGAG explained 2003 11 17 en
2003 11 12
2003 11 28
2009 11 17 arduino basics
2012 11 17 Jak powstaje ustawa str 1
2000 11 17 2535
2003 11 16
2003 07 17
2003 11 10
2010.11.17 Ekonomika Turystyki i Rekreacji RT, AWF
2003 11 36
2003 11 25
więcej podobnych podstron