PKM II
gwinty, śruby,
mechanizmy śrubowe

Połączenia gwintowe
Ogólna charakterystyka połączeń gwintowych
•
Połączenia gwintowe to połączenia cierno-kształtowe,
rozłączne.
•
Zasadniczym elementem połączenia gwintowego jest
łącznik, składający się ze śruby i nakrętki. Skręcenie ze
sobą śruby i nakrętki tworzy połączenie gwintowe.
•
Połączenia gwintowe dzieli się na:
•
pośrednie – części maszyn łączy się za pomocą łącznika,
rolę nakrętki może również spełniać gwintowany otwór
w jednej z części;
•
bezpośrednie – gwint jest wykonany na łączonych
częściach.
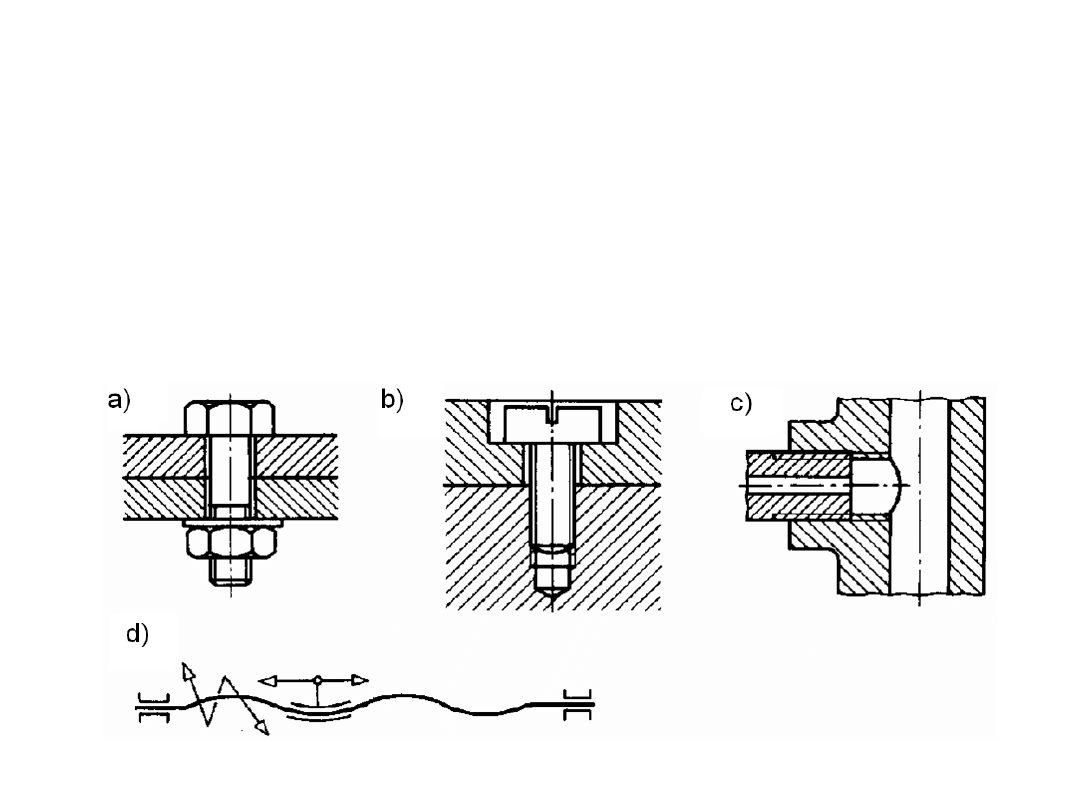
Połączenia gwintowe
• a),b) połączenia pośrednie
• c) połączenie bezpośrednie
• d) schemat mechanizmu śrubowego
M. Dietrich – Podstawy Budowy Maszyn
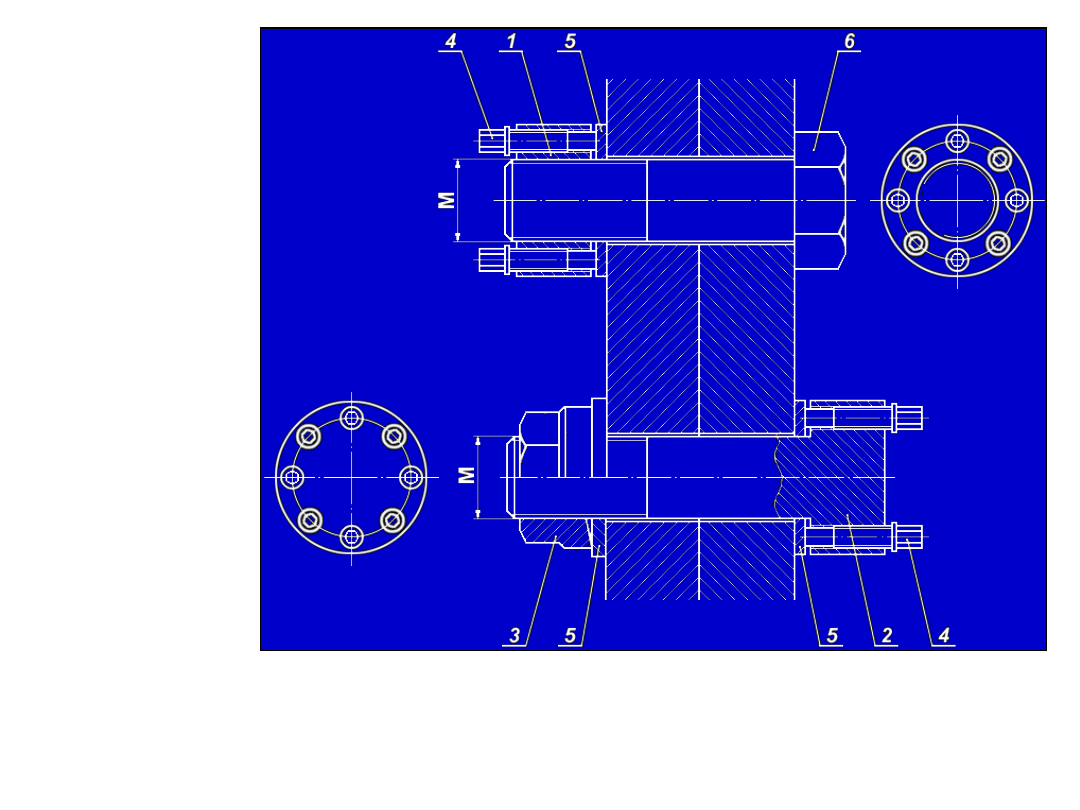
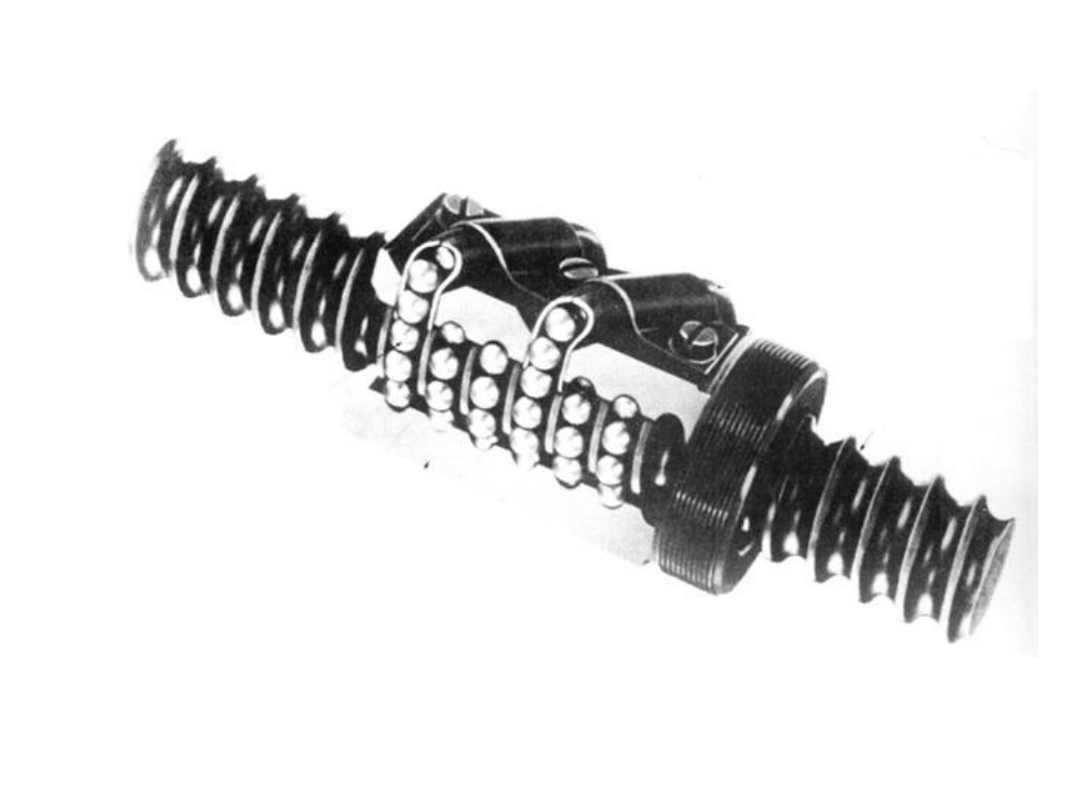
1. Korpus nakrętki
2. Korpus śruby
3. Nakrętka sprężysta
4. Śruba napinająca
5. Pierścień oporowy
6. Śruba standardowa
M – gwint główny
Dokręcanie śrub napinających (poz. 4) wywołuje nacisk na pierścień oporowy (poz. 5). Suma sił wywołanych
przez śruby napinające składa się na łączną siłę rozciągającą rdzeń śruby.
Podczas wkręcania śrub napinających, wraz ze zwiększającym się obciążeniem, elementy Superbolt
odkształcają się w taki sposób, że wszystkie nitki gwintu głównego są obciążone równomiernie.

Podstawowe cechy systemu Superbolt:
niskie momenty dokręcania - max. 860 Nm;
dowolne średnice i zarysy gwintów;
wysoka trwałość i niezawodność;
montaż w miejsce elementów standardowych;
zakres temperatur pracy od -250 do 630°C.
•
Korzyści ze stosowania elementów systemu Superbolt:
•
brak naprężeń skręcających rdzeń śruby i równomierne obciążenie wszystkich nitek
gwintu - przenoszenie wyższych naprężeń poosiowych przy tej samej średnicy gwintu
głównego, możliwość zastosowania elementów o mniejszych gabarytach;
•
brak ruchu obrotowego obciążonej nakrętki - wielokrotny montaż i demontaż bez oznak
zużycia nitek gwintu głównego;
•
średnica śrub napinających wielokrotnie mniejsza od średnicy gwintu głównego -
moment dokręcania śrub napinających od kilkunastu do kilkudziesięciu razy mniejszy
od momentu potrzebnego do wywołania analogicznego naprężenia w klasycznym
połączeniu gwintowym;
•
kompensacja nieprostopadłości osi śruby do powierzchni oporowej.
•
W połączeniach gwintowych napinanych elementami systemu Superbolt mogą
występować naprężenia wyższe od występujących w połączeniach klasycznych - zaleca
się zastępowanie nakrętek standardowych sprężystymi nakrętkami Superbolt.
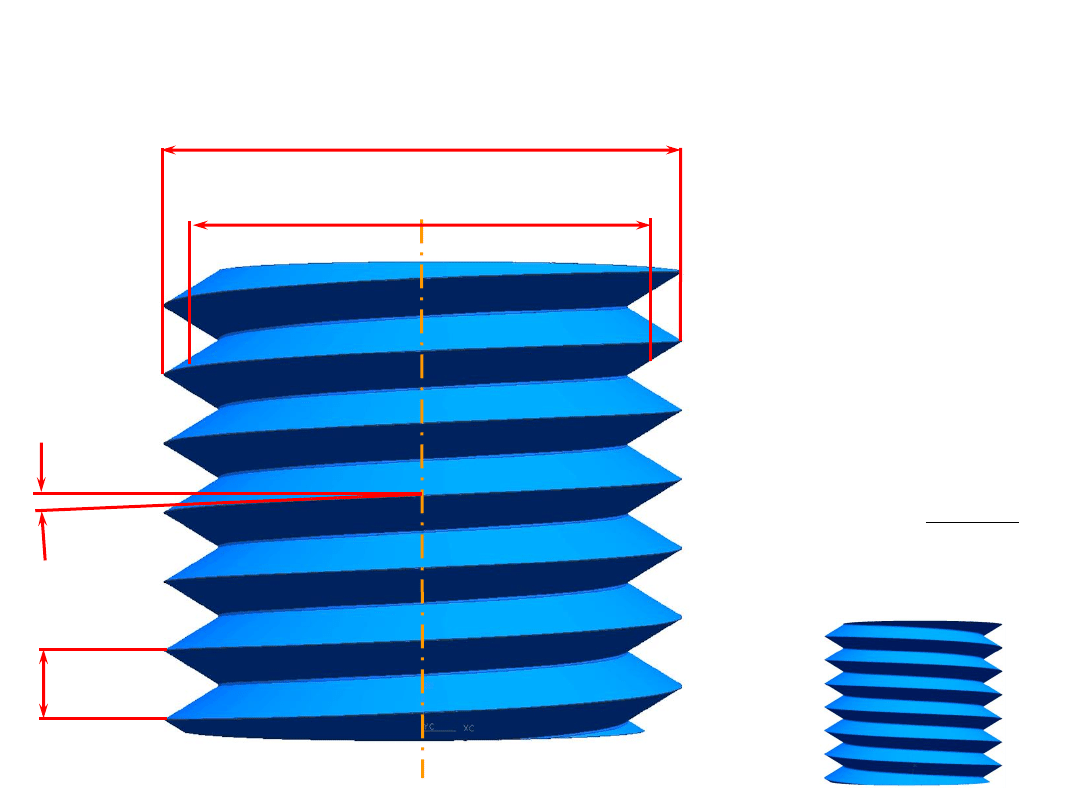
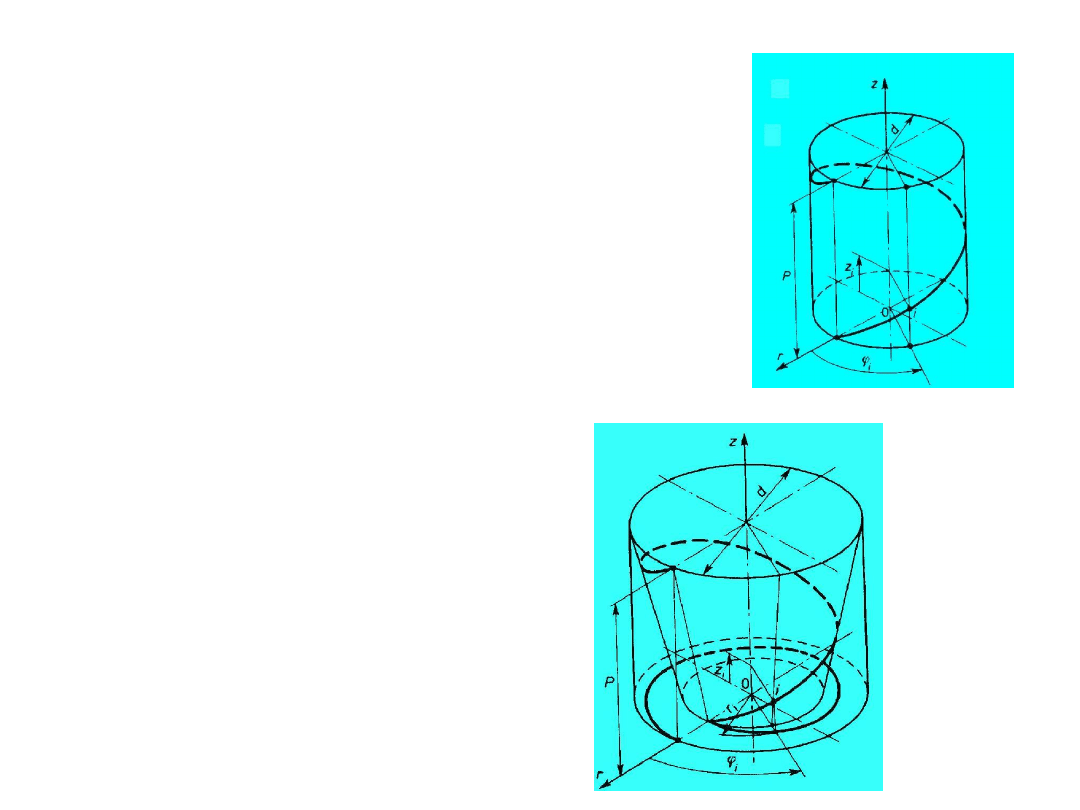
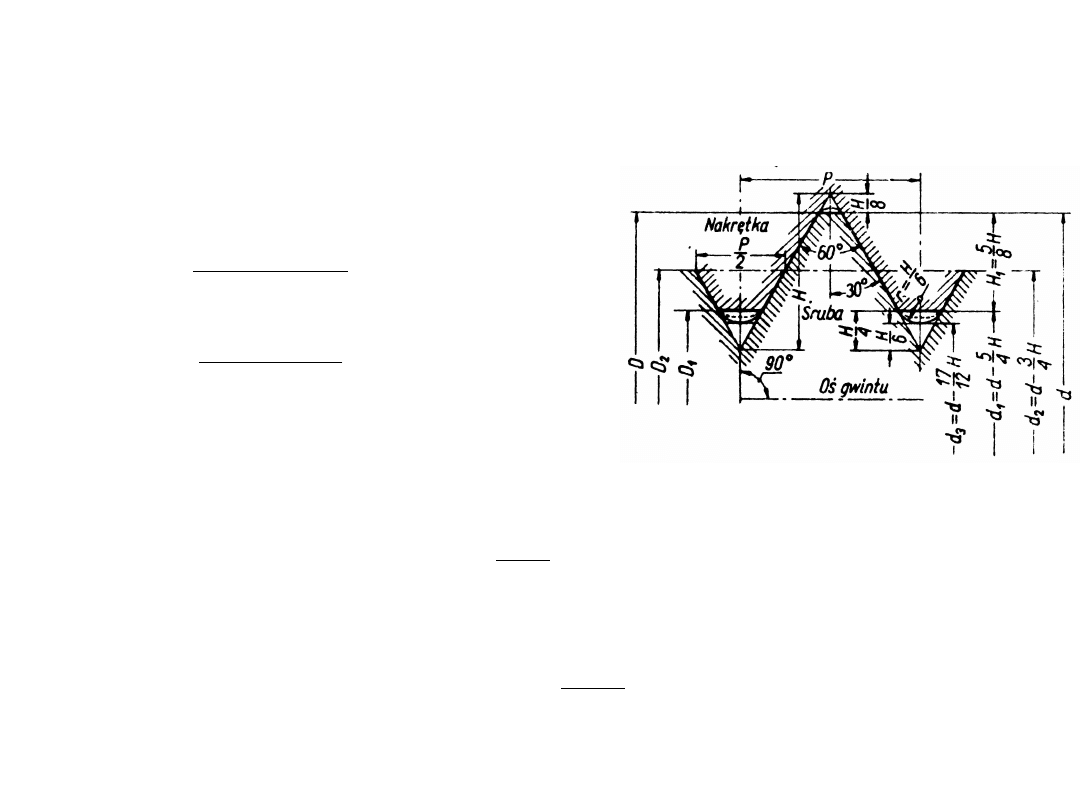
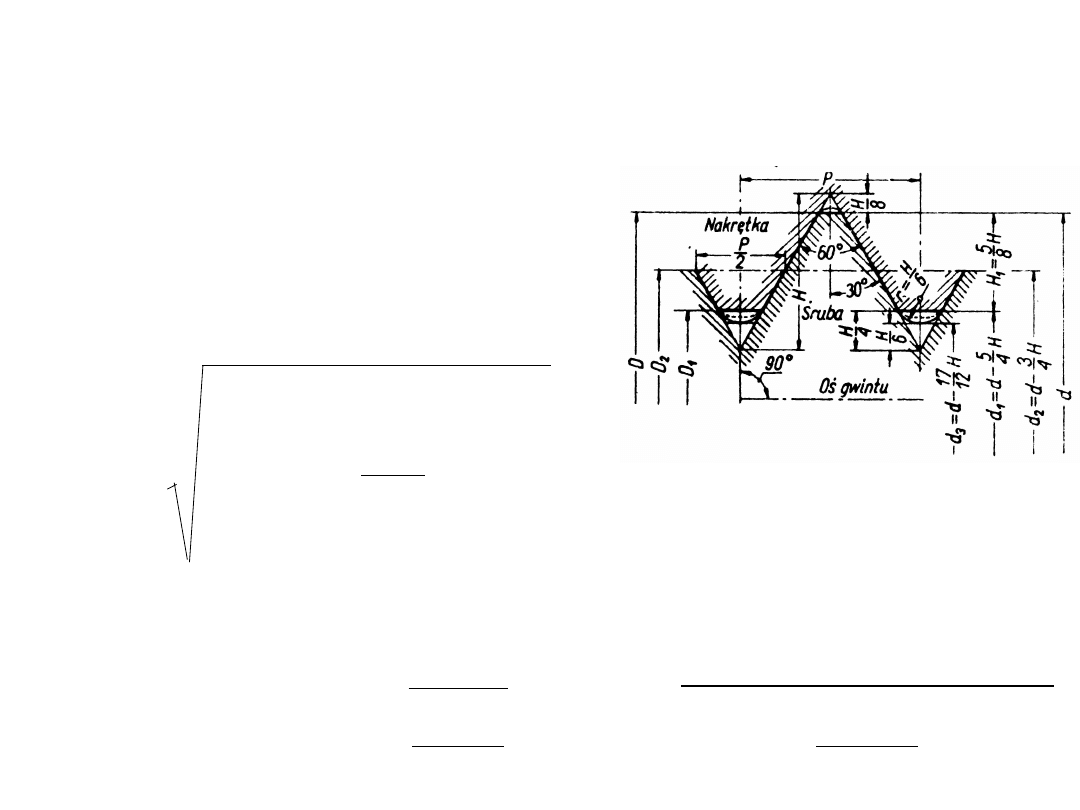
d
P
g
podstawowe parametry linii śrubowej – równia pochyła
2
tg
d
P
g
d -
średnica gwintu
(nominalna)
d
2
-
średnica
podziałowa
P - skok gwintu
g
- pochylenie linii
śrubowej
d
2
Gwint walcowy
Połączenia spoczynkowe i ruchowe
Gwint stożkowy
Tylko połączenia spoczynkowe –
umożliwia regulację nacisków
międzyzwojnych, skasowanie luzów i
uzyskanie szczelności – zastosowanie
w przewodach rurowych
Rodzaje gwintów
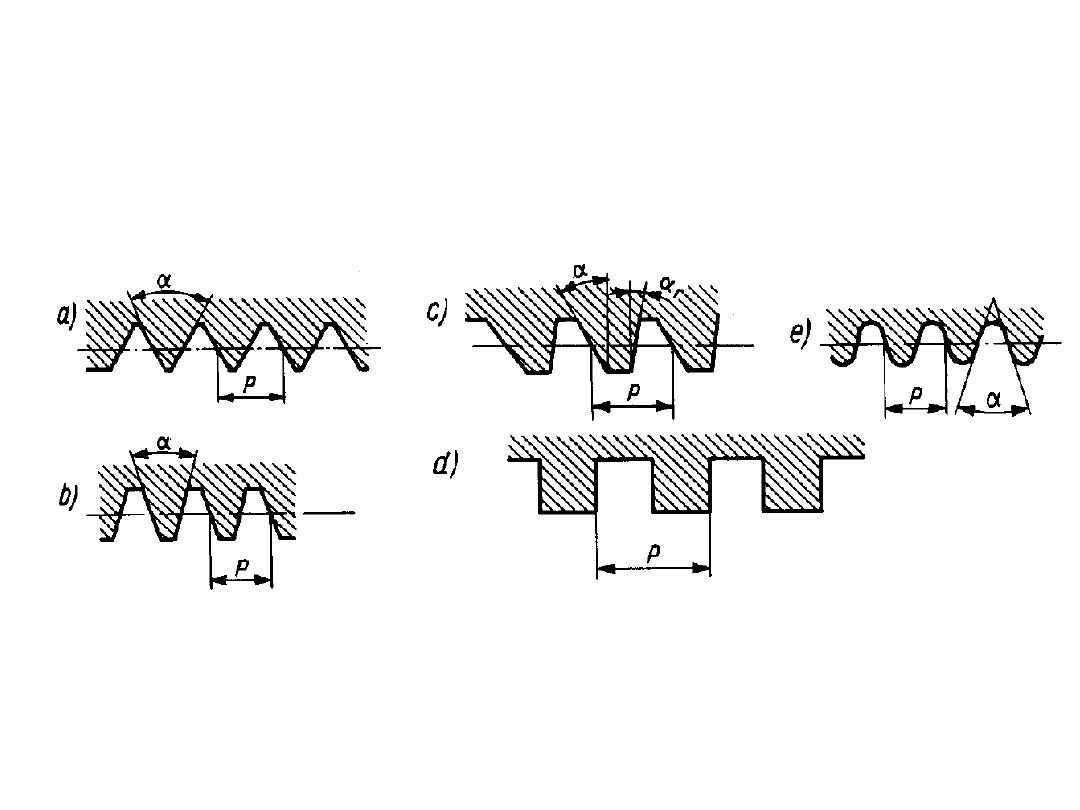
Rodzaje gwintów
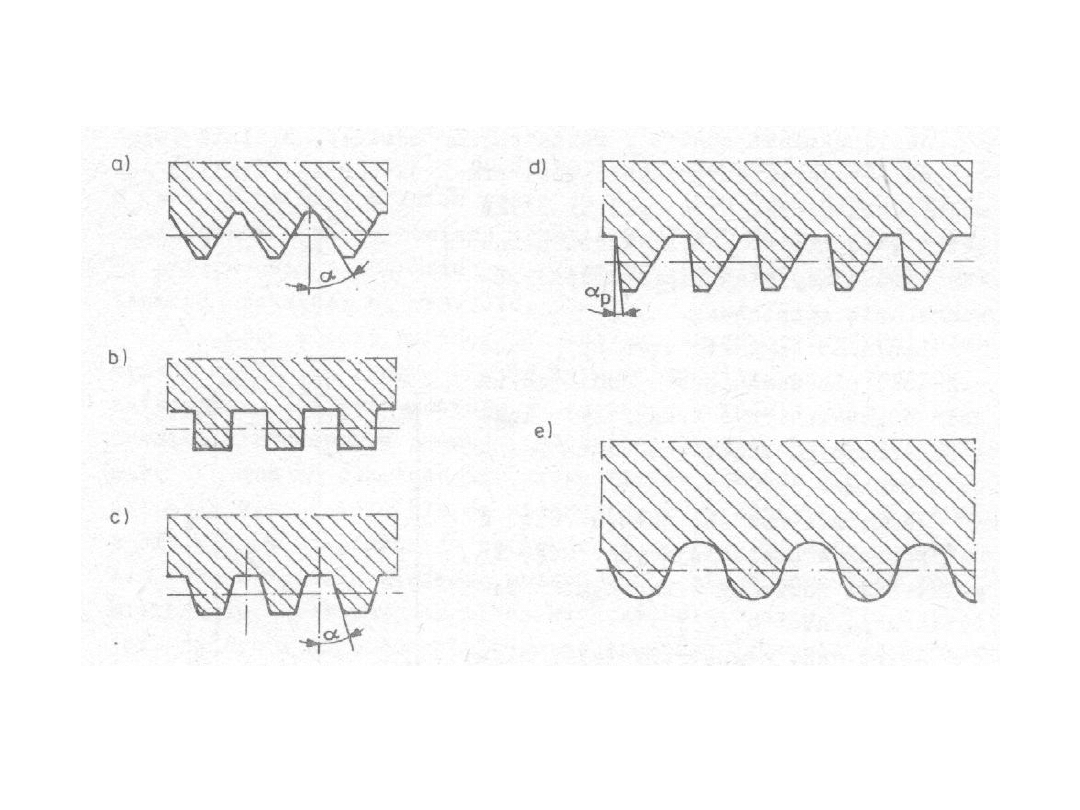
Rodzaje gwintów (trójkątne, prostokątne, trapezowe, okrągłe)
Gwint prawy – powszechnie stosowany
Gwint lewy – rzadziej stosowany, np. śruba
rzymska, zawory, gdy użycie gwintu prawego
sprzyja luzowaniu się złącza.
Gwint pojedynczy - powszechnie stosowany
Gwint wielokrotny (podziałka gwintu) –
mechanizmy, gdy wymagana jest duża
sprawność mechanizmu.
Gwint symetryczny- zmienny kierunek
obciążenia.
Gwint niesymetryczny – jednokierunkowe
obciążenie, w mechanizmach o wymaganej
dużej sprawności.
Gwint zwykły – normalny skok P – najczęściej występuje
Gwint grubozwojny – duży skok P – gdy o wytrzymałości złącza
decydują naciski na zwoje, a nie wytrzymałość rdzenia śruby, duże
obciążenia.
Gwint drobnozwojny – mały skok P – większa wytrzymałość statyczna
i zmęczeniowa rdzenia śruby, lepiej zabezpiecza złącze przed
luzowaniem się, ale wymaga większej dokładności – efekt karbu
wielokrotnego. Połączenia regulujące wzajemne położenie elementów.
Gwint okrągły – minimalizacja koncentracji naprężeń
Połączenia ruchowe – odporność na zużycie, duża
sprawność. Nie samohamowne i samohamowne.
Samohamowność połączenia gwintowego (np. gwinty
metryczne)
Umowny kąt pozornego tarcia
Połączenia spoczynkowe – wywołanie dużego nacisku w
polu styku elementów łączonych, zabezpieczenie przed
luzowaniem się złącza…Samohamowne
Połączenia szczelne – ciasne pasowania, gwinty
stożkowe.
cos
arctg
g
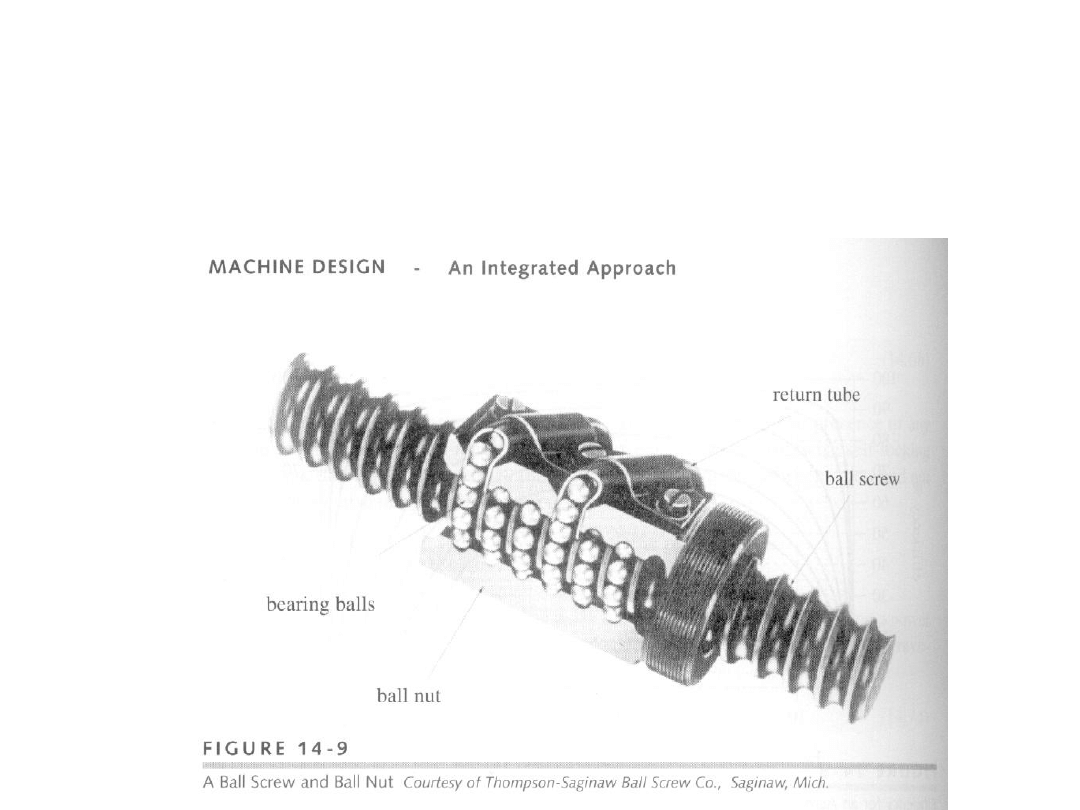
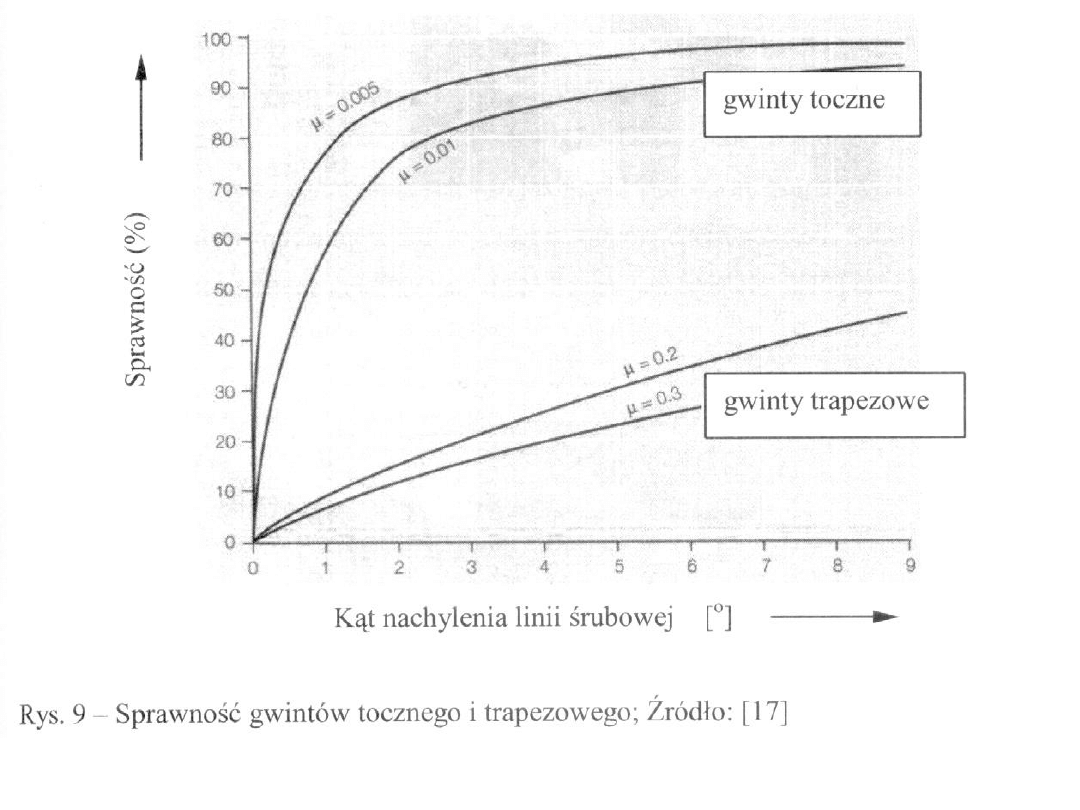
Gwint toczny
Bardzo duża sprawność, mogą przenosić duże obciążenia.
Zastosowania: podnośniki, napędy sterów w samolotach, mechanizmy
chowania i wypuszczania podwozia, mechanizmy sterowania w
samochodach, łóżkach szpitalnych …
podstawowe rodzaje gwintów
nazwa
skrót oznaczenie opis dodatkowy
metryczny
zwykły
M
M24
gwinty trójkątne
o kącie zarysu
2
=60
metryczny
drobnozwojny
M24x1,5
calowy
(Whitworth’a)
-
3/4”
kąt zarysu 2
=55
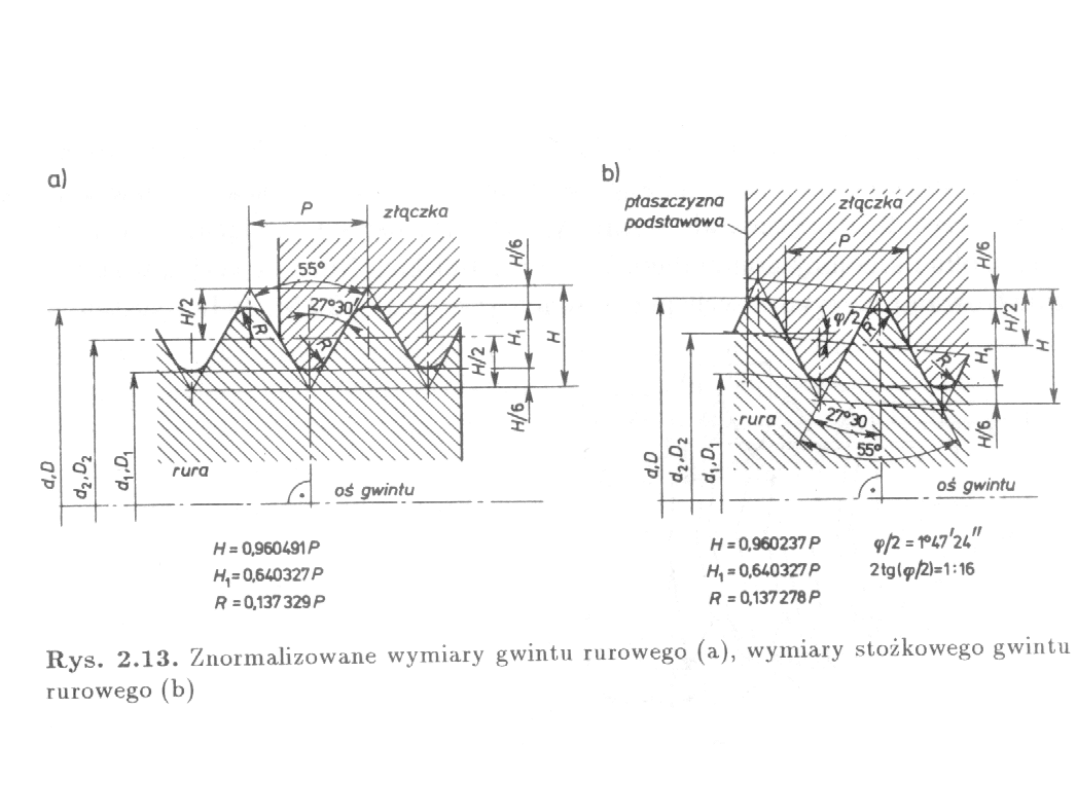
rurowy
R
R3”
cylindryczne lub
stożkowe
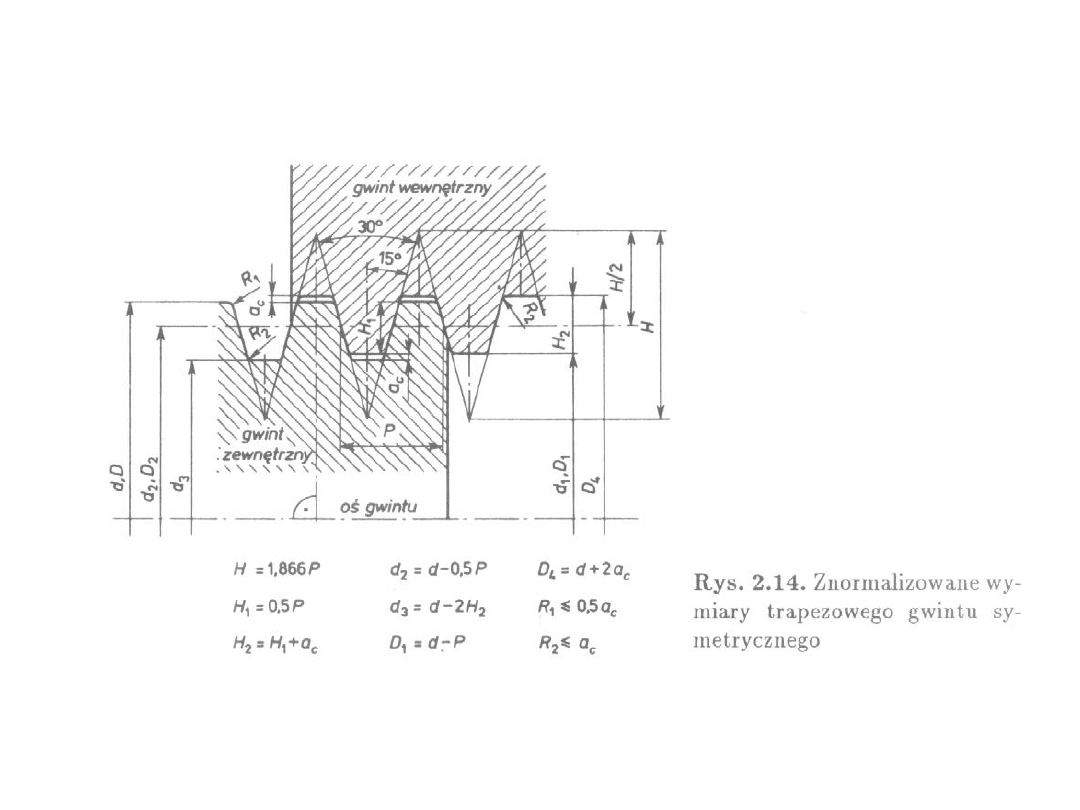
trapezowy
symetryczny
Tr
Tr48x8
kąt zarysu 2
=30
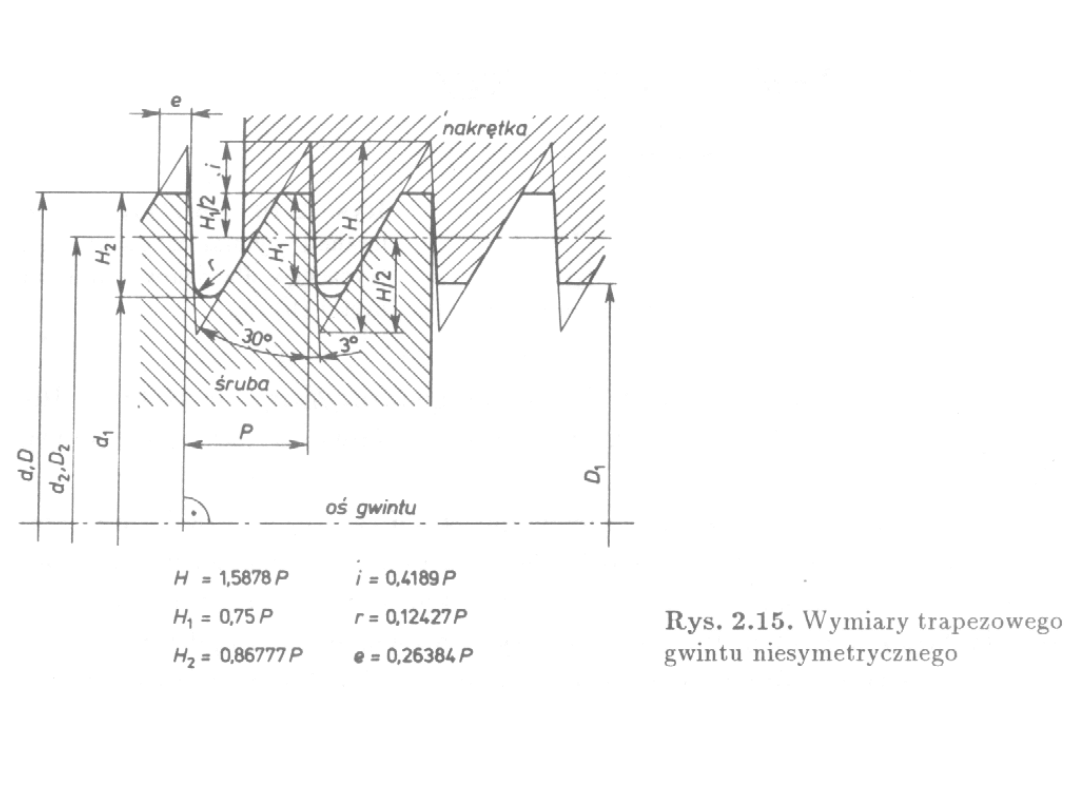
trapezowy
niesymetryczny
S
S48x8
kąty zarysu
r
=3 ;
p
=30

Wybrane oznaczenia rodzajów gwintów
BSF - gwint calowy Whitwotha, drobnozwojny,
BSW - gwint calowy Whitwortha, zwykły,
E - gwint Edisona, sprzęt elektrotechniczny,
G - gwint rurowy Whitwortha, walcowy,
M - gwint metryczny zwykły i drobnozwojny,
NPT - gwint rurowy Briggsa, stożkowy
Pg - gwint specjalny instalacyjny, pancerny,
R - gwint rurowy Whitwortha, stożkowy, zewnętrzny,
Rc - gwint rurowy Whitwortha, stożkowy, wewnętrzny,
Rd - gwint okrągły, duża wytrzymałość rdzenia, mała wrażliwość na
zanieczyszczenia, np. w ściągach wagonów, w hakach dźwigów,
przewodach pożarniczych…
Rp - gwint rurowy Whitwortha, walcowy wewnętrzny,
RW, FG - gwint rowerowy,
S - gwint trapezowy niesymetryczny,
Tr - gwint trapezowy symetryczny,
UN - gwinty zunifikowane o skoku uprzywilejowanym,
UNC - gwint calowy, zunifikowany, zwykły,
UNEF - gwint calowy, zunifikowany, bardzo drobnozwojny,
UNF - gwint calowy, zunifikowany, drobnozwojny,
UNS - gwinty zunifikowane specjalne,
Ven, Vg - gwint wentylowy,
W - gwint stożkowy do zaworów gazowych,
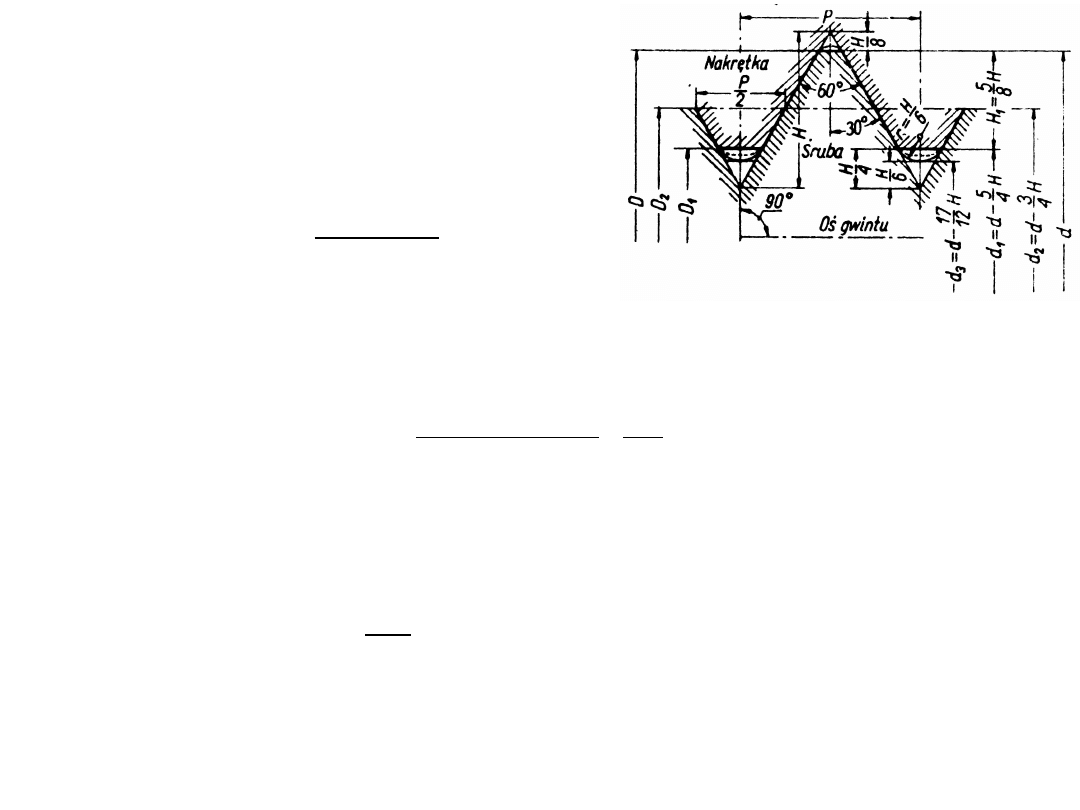
gwint metryczny zwykły

Gwinty są znormalizowane przez Polską Normę. Definiuje się w niej
gwinty metryczne, to znaczy takie, których średnica gwintu w
milimetrach jest typoszeregiem liczb naturalnych lub ich ułamków
dziesiętnych w przypadku gwintów drobnych.
Zgodnie z tym gwint metryczny koduje się Mn, gdzie n to średnica
gwintu w milimetrach np. M5, M20.
W gwintach, w których skok P jest inny niż by to wynikało z ogólnej
zasady, dodatkowo specyfikuje się ten parametr w kodzie gwintu
metrycznego, np. M20x2 (gwint metryczny o średnicy d = 20 mm i
skoku P = 2mm), M20x1.5, M20x1, M20x0.75. M20 posiada
normalny skok P = 2,5 mm.
szereg gwintów metrycznych
d=D
szeregi średnic
P
d
2
=
D
2
d
1
=
D
1
d
3
r
H
mm
2
gwint
1
2
3
zwy-
kły
drobno-
zwojny
24
3
2
1,5
1
0,75
22,051
22,701
23,026
23,351
23,513
20,752
21,835
22,376
22,918
23,188
20,319
21,546
22,160
22,773
23,080
0,433
0,259
0,217
0,144
0,108
1,624
1,083
0,812
0,541
0,406
324
365
386
407
419
25
2
1,5
1
23,701
24,026
24,351
22,835
23,376
23,918
22,546
23,160
23,773
0,289
0,217
0,144
1,083
0,812
0,541
399
421
444
26
1,5
25,026
24,376
24,160
0,217
0,812
458
27
3
2
1,5
1
0,75
25,051
25,701
26,026
26,351
26,513
23,752
24,835
25,376
25,918
26,188
23,319
24,546
25,160
25,773
26,080
0,433
0,259
0,217
0,144
0,108
1,624
1,083
0,812
0,541
0,406
427
473
497
522
535
4
2
3
d
Mikołaj Piotrowski – pr. mgr.
γ
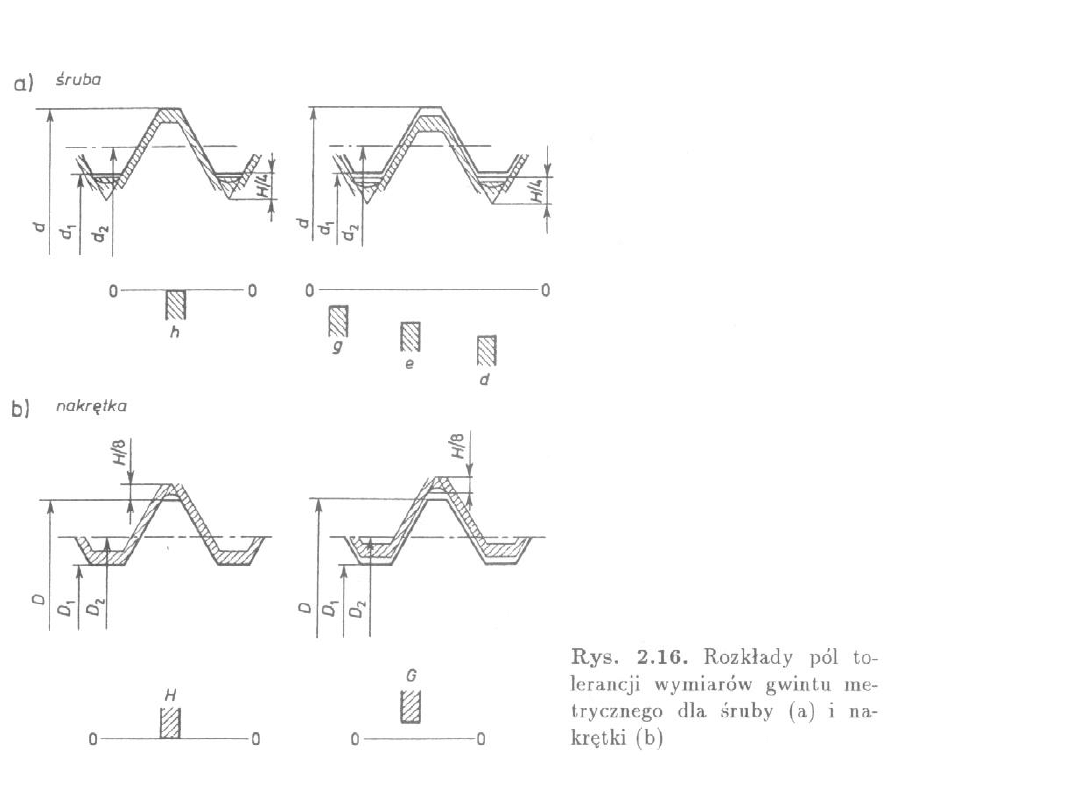
Tolerancje i pasowania gwintów – w głąb materiału
Suwliwe – połączenia
spoczynkowe, wymagane częste
złącznie i rozłączanie
Ciasne – połączenia
spoczynkowe, wymagane duże
siły tarcia, szczelność
Luźne – polączenia ruchowe

Technologia gwintów
Gwintowanie (narzynki i gwintowniki)
Frezowanie
Toczenie
Wygniatanie (walcowanie) – rolki, drewno, tworzywa
sztuczne
Wytłaczanie (np. gwintu E w mosiężnych rurkach)
Odlewanie pod ciśnieniem – metale nieżelazne, tworzywa
sztuczne
M. Dietrich – Podstawy Budowy Maszyn
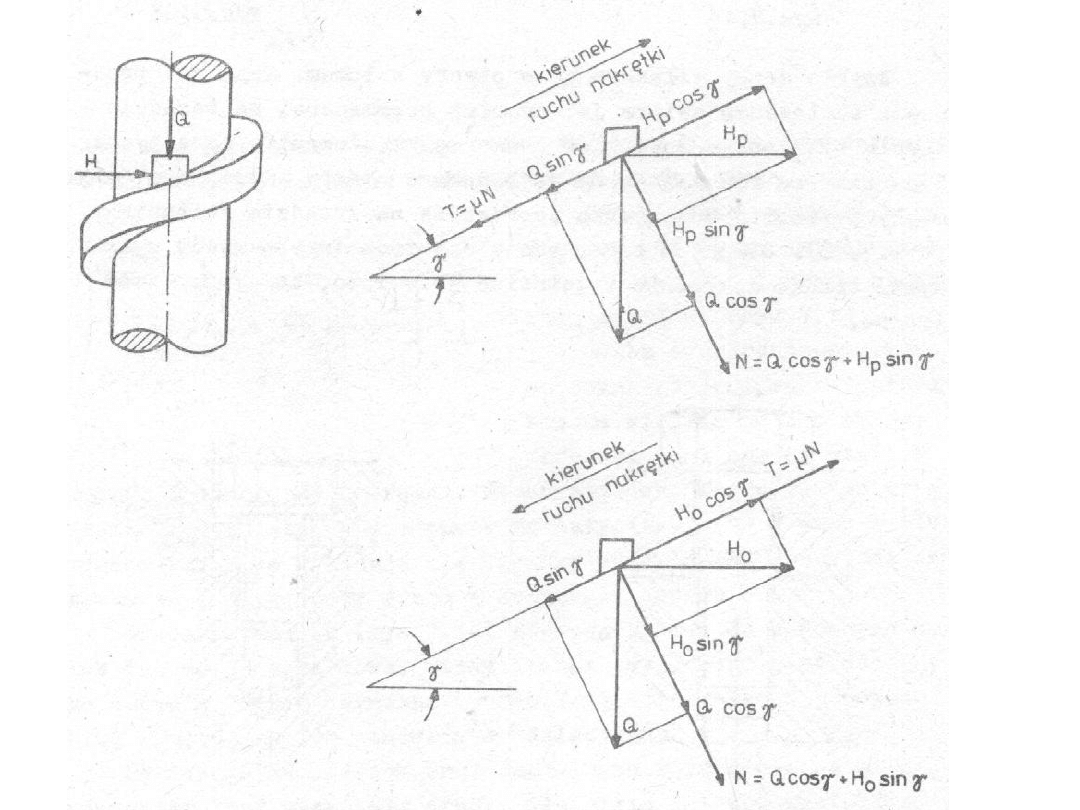
T + Q sin γ = Hp cos γ
T = N μ = (Q cos γ + Hp sin γ) μ
Hp = Q tg (γ + ρ) przy podnoszeniu
μ = tg ρ
Ho = Q tg (γ - ρ) przy opuszczaniu
Jeżeli γ > ρ, czyli Ho > 0 to gwint jest niesamohamowny !!!
Jeżeli γ < ρ, czyli Ho < 0 to gwint jest samohamowny !!!
Dla gwintów nieprostokątnych – wzrost siły
tarcia:
Hp = Q tg (γ + ρ’) przy podnoszeniu
Ho = Q tg (γ – ρ’) przy opuszczaniu
cos
'
'
tg
M = 0.5 d
2
Q tg (γ
ρ’)
Moment nakrętka – śruba:
Sprawność (stosunek pracy użytecznej do pracy
włożonej):
cos
'
'
tg
'
tg
tg
2
g
g
M
P
Q
P – skok gwintu
P = π d tg γ
Ruch do góry:
g
g
tg
'
tg
2
P
Q
M
Ruch w dół
(niesamohamowne):
obliczenia gwintów - wprowadzenie
całkowity moment oporów na śrubie:
n
n
D
d
Q
M
g
'
tg
2
2
Q -
siła osiowa
d
2
-
średnia średnica gwintu
γ
-
pochylenie linii śrubowej
ρ’ - kąt tarcia na gwincie
D
n
-
średnica tarcia nakrętki
μ
n
-
współczynnik tarcia nakrętki
cos
'
'
tg
obliczenia gwintów - wprowadzenie
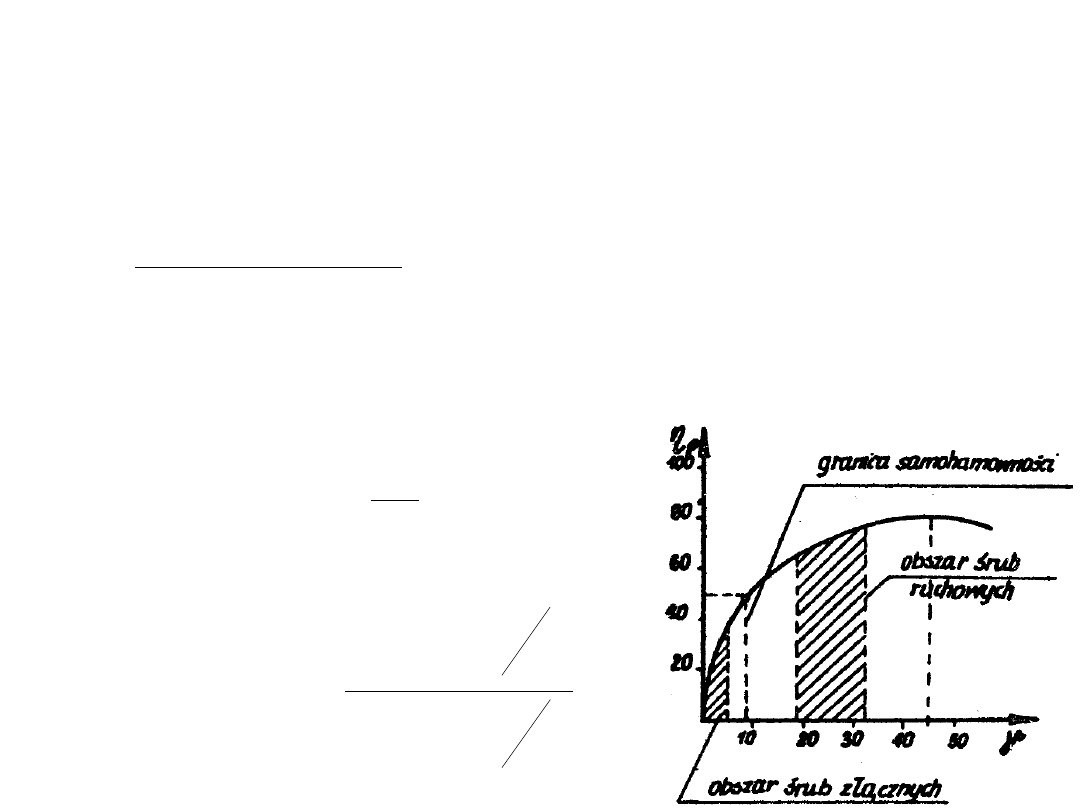
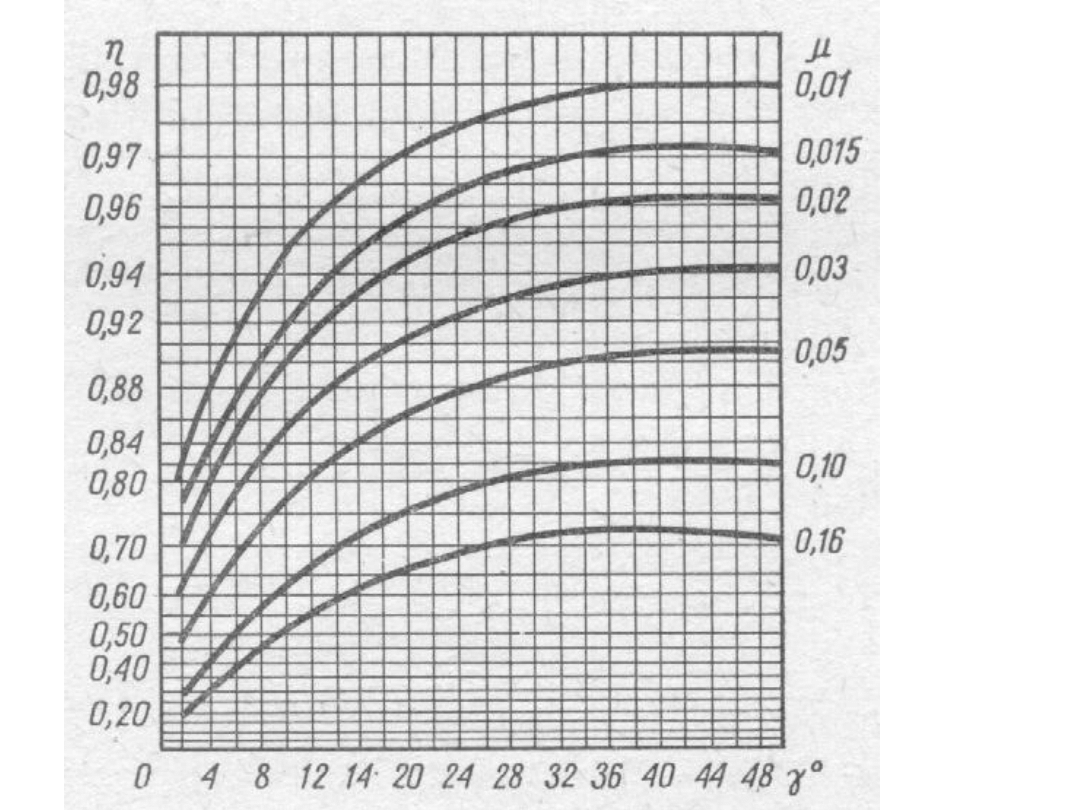
sprawność gwintu:
'
tg
tg
g
g
γ - pochylenie linii śrubowej
ρ’ - kąt tarcia na gwincie
2
'
45
g
opt
2
'
45
tg
2
'
45
tg
max
dla
ρ’ = 5 40’ (μ=0,1)
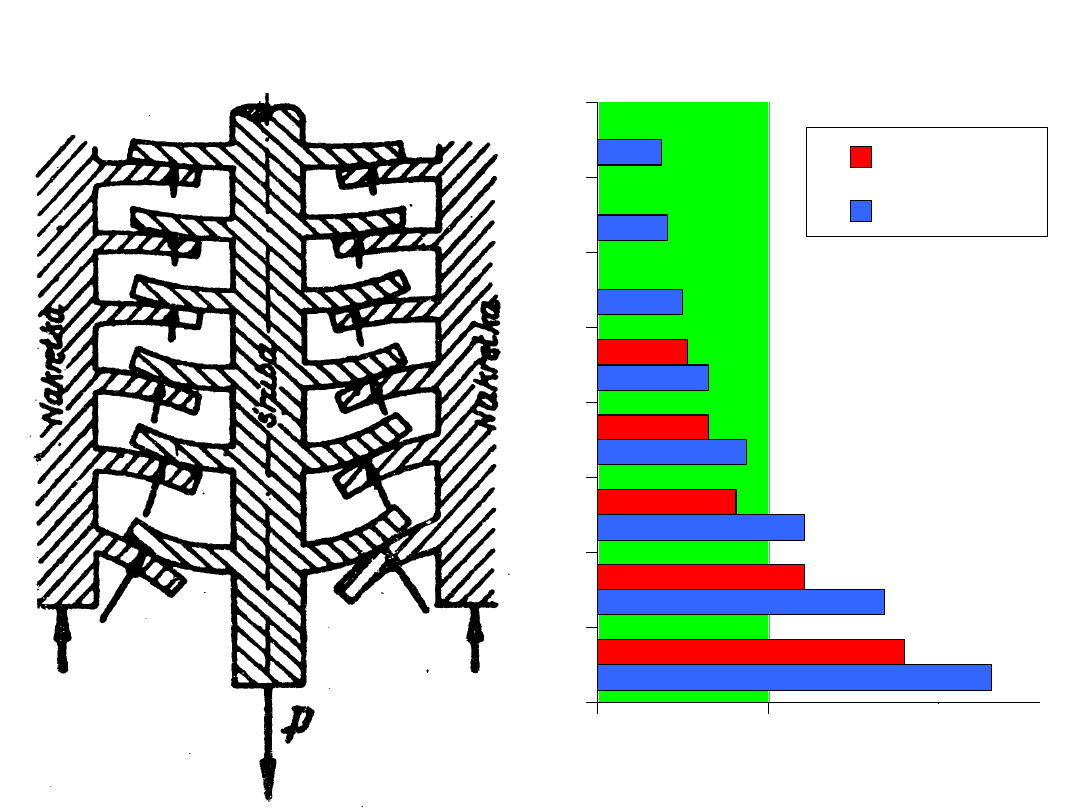
obciążenie poszczególnych nitek gwintu
231
168
121
87
65
50
41
37
180
121
81
65
53
0
100
200
1
2
3
4
5
6
7
8
5 zwojów
8 zwojów
obciążenie
%
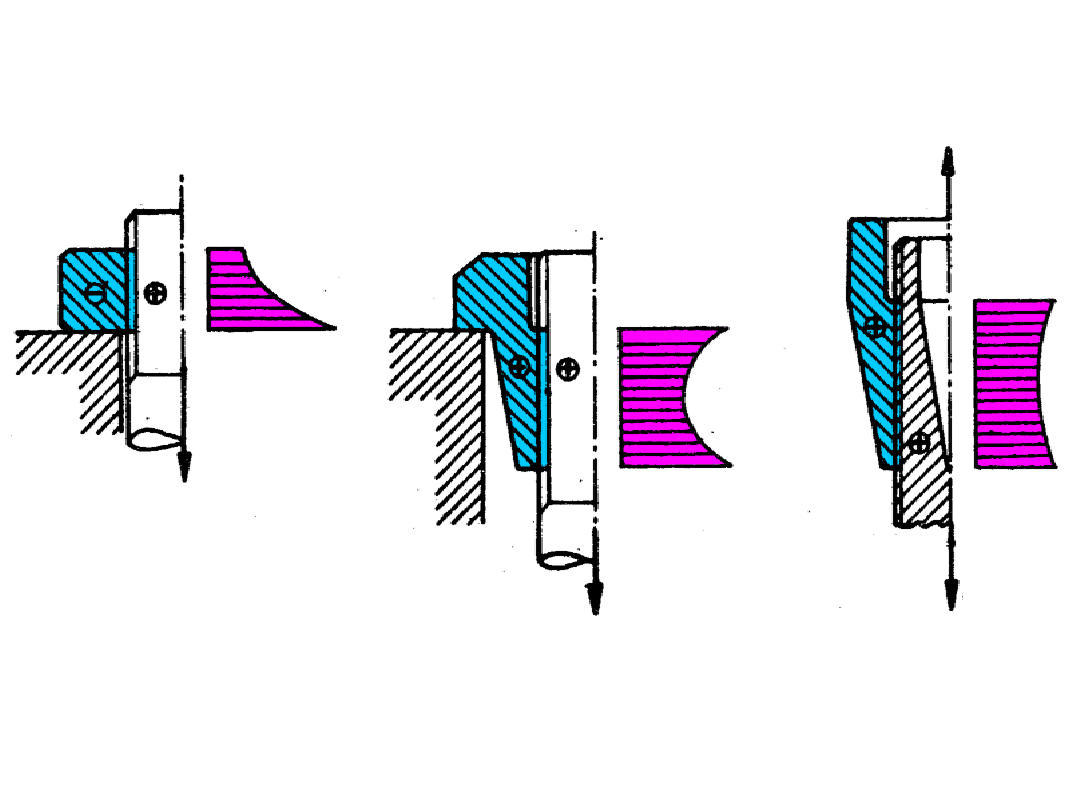
optymalizacja kształtu nakrętki
Q
Q
Q
Q
wytrzymałość gwintu
1.
rozciąganie rdzenia śruby
2.
nacisk na powierzchnię gwintu
3.
ścinanie gwintu
r
r
k
d
k
A
Q
4
2
3
3
dop
dop
p
p
P
m
d
d
p
i
A
Q
4
)
(
2
1
2
t
t
t
t
k
h
d
P
m
k
A
Q
1
1.
warunek nacisku na powierzchnię gwintu
2.
warunek ścinania gwintu
wytrzymałość gwintu – wysokość nakrętki
d
m
p
P
m
d
d
k
d
Q
dop
r
67
,
0
4
)
(
4
2
1
2
2
3
dop
p
d
d
P
Q
m
2
1
2
4
t
t
k
h
d
P
Q
m
1
d
m
k
P
m
h
d
k
d
Q
t
t
r
48
,
0
4
1
2
3

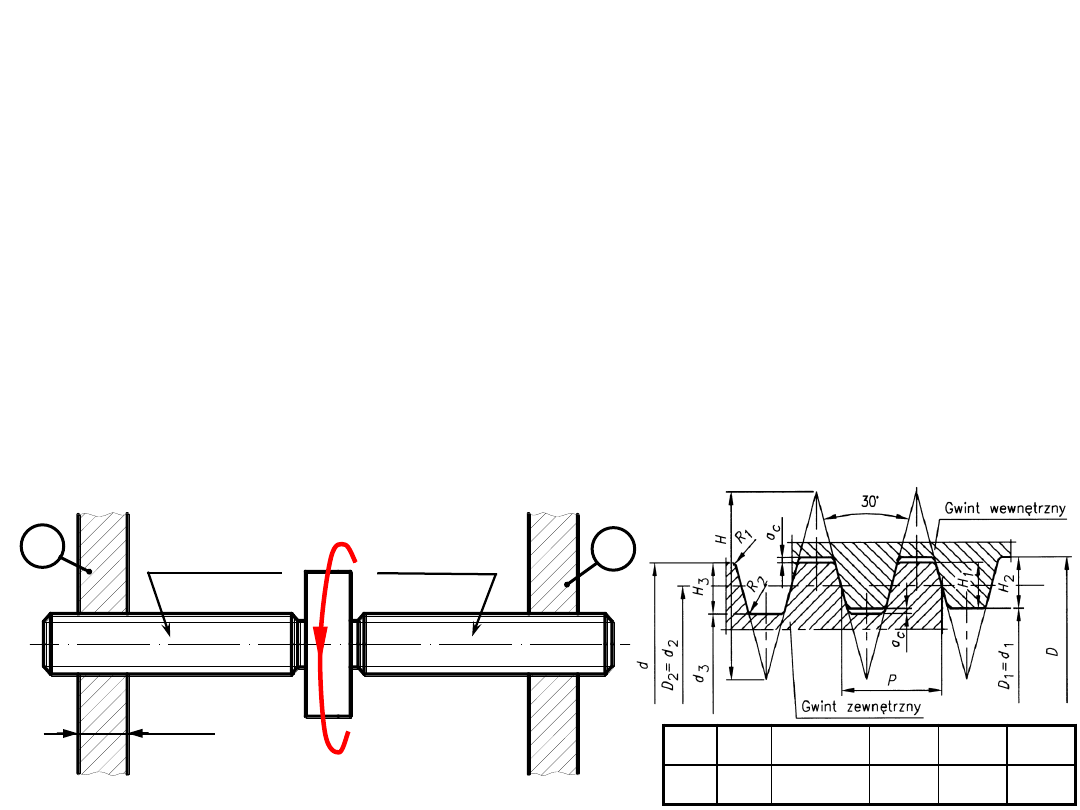
sposoby obciążenia śruby
1.
czyste rozciąganie (ściskanie) siłą osiową
(np. hak)
2.
rozciąganie (ściskanie) siłą osiową oraz skręcanie
momentem skręcającym
(głównie mechanizmy gwintowe np. śruba pociągowa,
wrzeciono zaworu)
3.
obciążenie wstępne rozciągającą siłą osiową
i momentem skręcającym oraz obciążenie
robocze siłą osiową (stałą lub zmienną)
(typowe złącze śrubowe, np. pokrywka obciążona ciśnieniem)
4.
obciążenie wstępne rozciągającą siłą osiową
i momentem skręcającym oraz obciążenie
robocze siłą poprzeczną
(typowe złącza śrubowe np. sprzęgła kołnierzowe)
sposoby obciążenia śruby
1.
czyste rozciąganie (ściskanie) siłą osiową
r
r
k
d
Q
4
2
3
obciążenia statyczne:
obciążenia zmęczeniowe:
5
,
2
3
,
1
;
e
e
e
r
x
x
R
k
5
5
,
2
;
z
z
rj
r
x
x
Z
k
sposoby obciążenia śruby
2.
rozciąganie (ściskanie) siłą osiową oraz skręcanie
momentem skręcającym
4
2
3
d
Q
r
s
r
z
k
k
k
2
2
2
16
'
tg
5
,
0
3
3
2
d
Q
d
g
sposoby obciążenia śruby
4.
obciążenie wstępne rozciągającą siłą osiową
i momentem skręcającym oraz obciążenie
robocze siłą poprzeczną
• śruby pasowane:
• śruby z luzem:
t
k
d
T
4
2
dop
p
d
g
T
p
r
w
k
d
Q
T
4
2
3
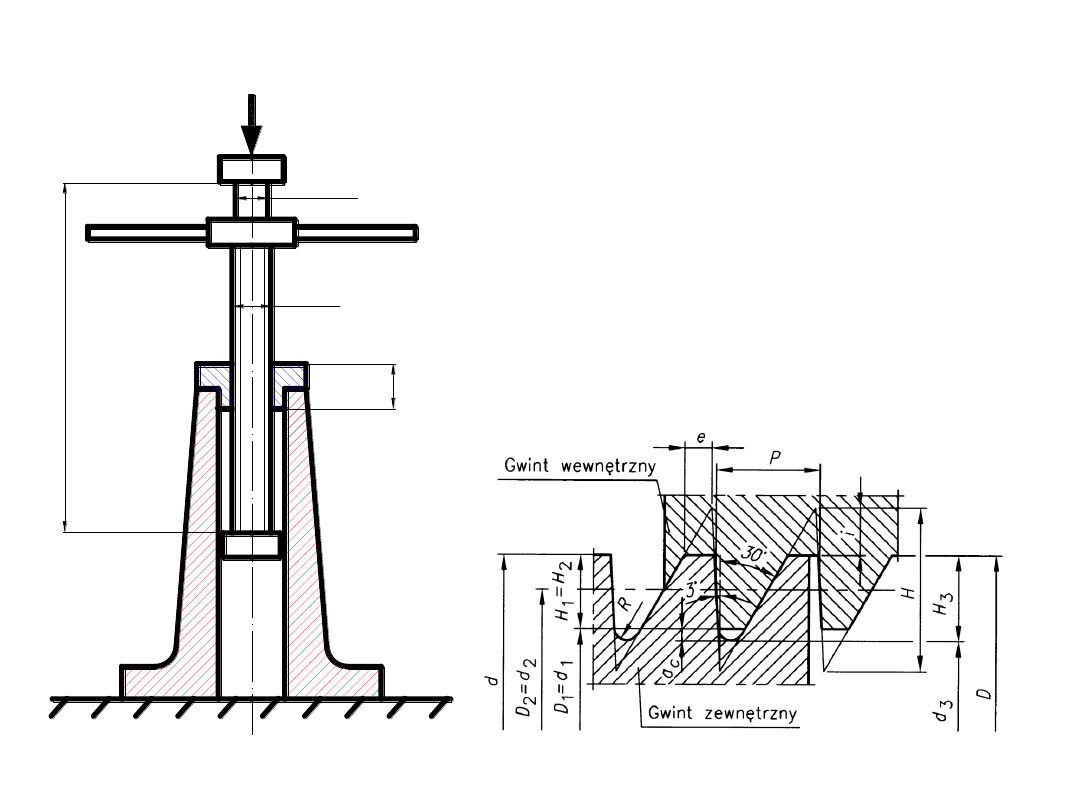
ZADANIE 1:
m
l
d
0
S40x6
Q
1.
Całkowity moment potrzebny do podniesienia masy jeśli
wsp. tarcia na gwincie wynosi
= 0,1,
zaś na głowicy
podnośnika
o
=0,15.
Średnica d
o
=30 mm;
2.Wykresy
składowych obciążenia śruby;
3.
Wysokość nakrętki m, jeśli dopuszczalne naciski na
zwojach gwintu
wynoszą p
dop
= 12 MPa;
4.
Maksymalne naprężenia w śrubie
5.
Sprawność
Podnośnik ze śrubą z gwintem S40x6 wykonaną ze
stali E360 podnosi
masę M = 4000 kg.
Wyznaczyć:
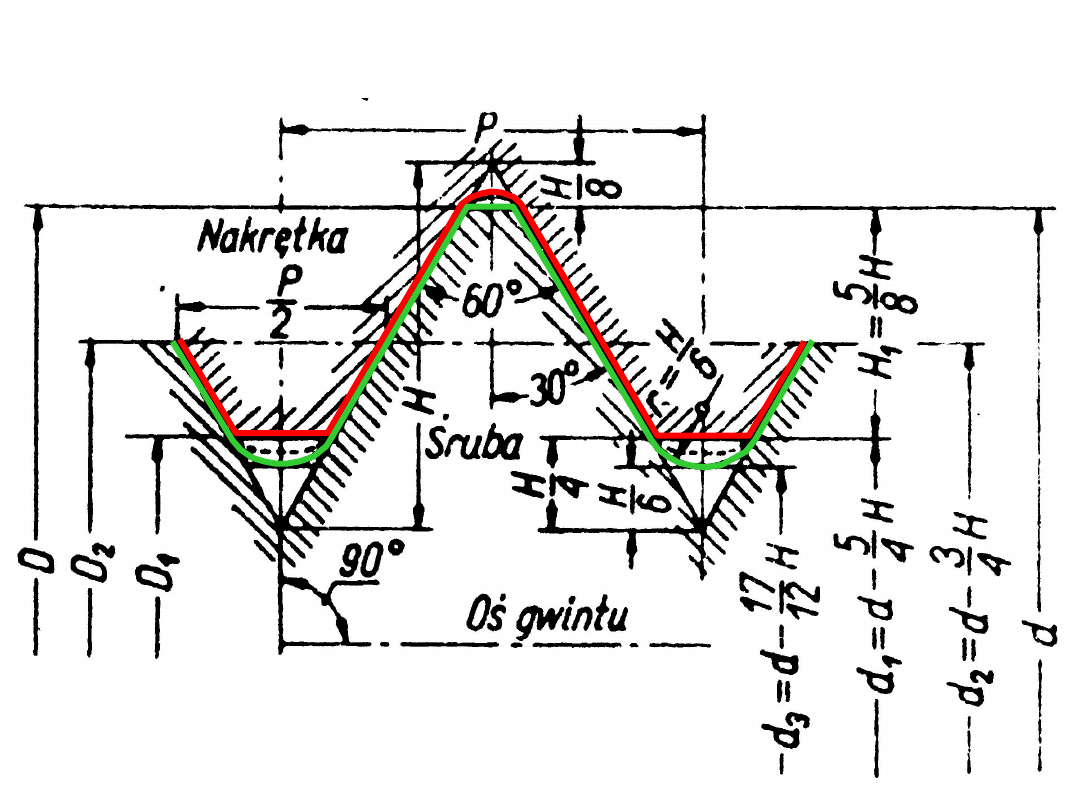
H=1,587911·P; H
1
=0,75 ·P; H
3
=H
1
+a
c;
a
c
=0,117767 ·P; d=D; d
2
=d-0,75 ·P; d
3
=d-2 ·H
3
; D
1
=d-1,5·P
sposoby obciążenia śruby
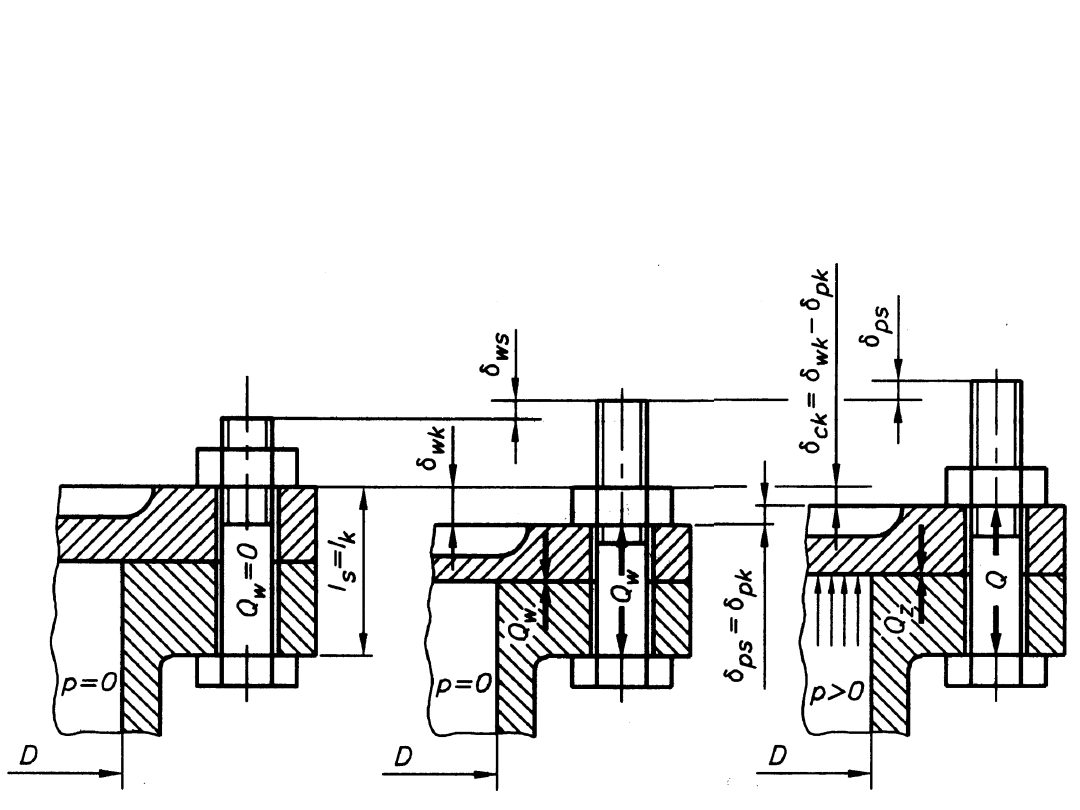
3.
obciążenie wstępne rozciągającą siłą osiową
(i momentem skręcającym) oraz obciążenie
robocze siłą osiową (stałą lub zmienną)
Δ
l
k
Δ
l
s
Q
Q
w
δ
ws
β
δ
wk
α
δ
ps
= δ
pk
Q
k
Q
s
ΔQ
p
ΔQ
ps
ΔQ
pk
δ
wk
β
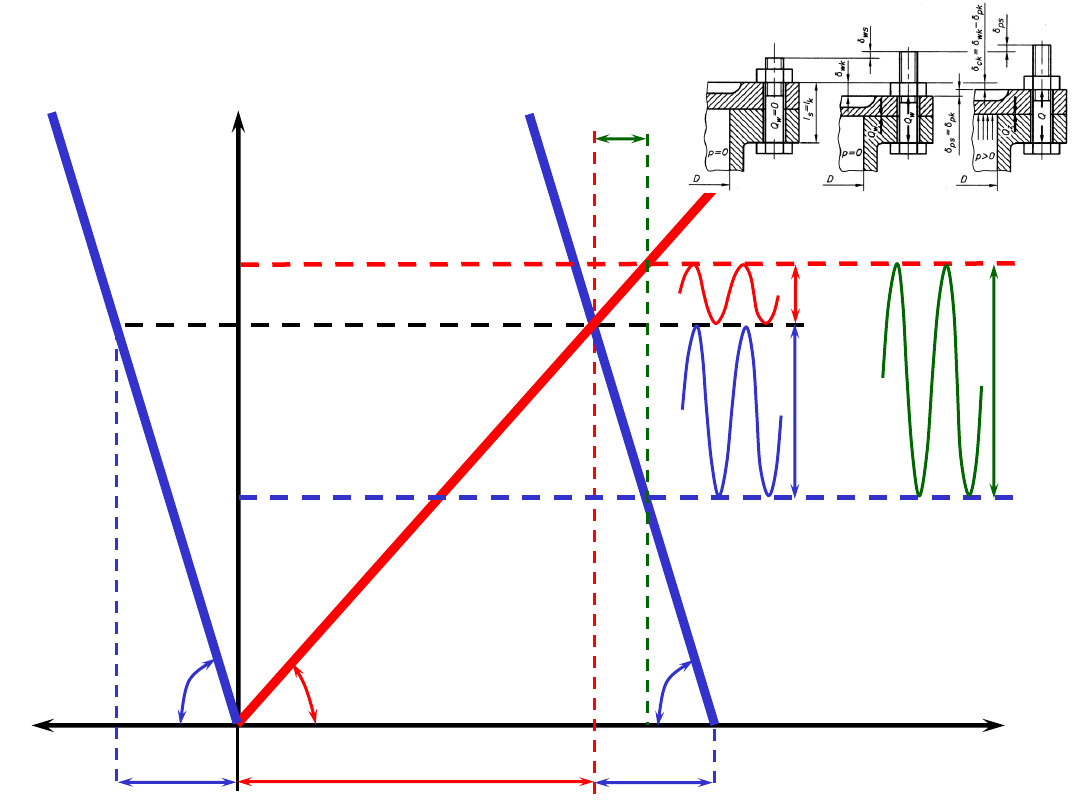
śruby z naciągiem wstępnym
Δ
l
Q
Q
w
β
ΔQ
p
ΔQ
ps
ΔQ
pk
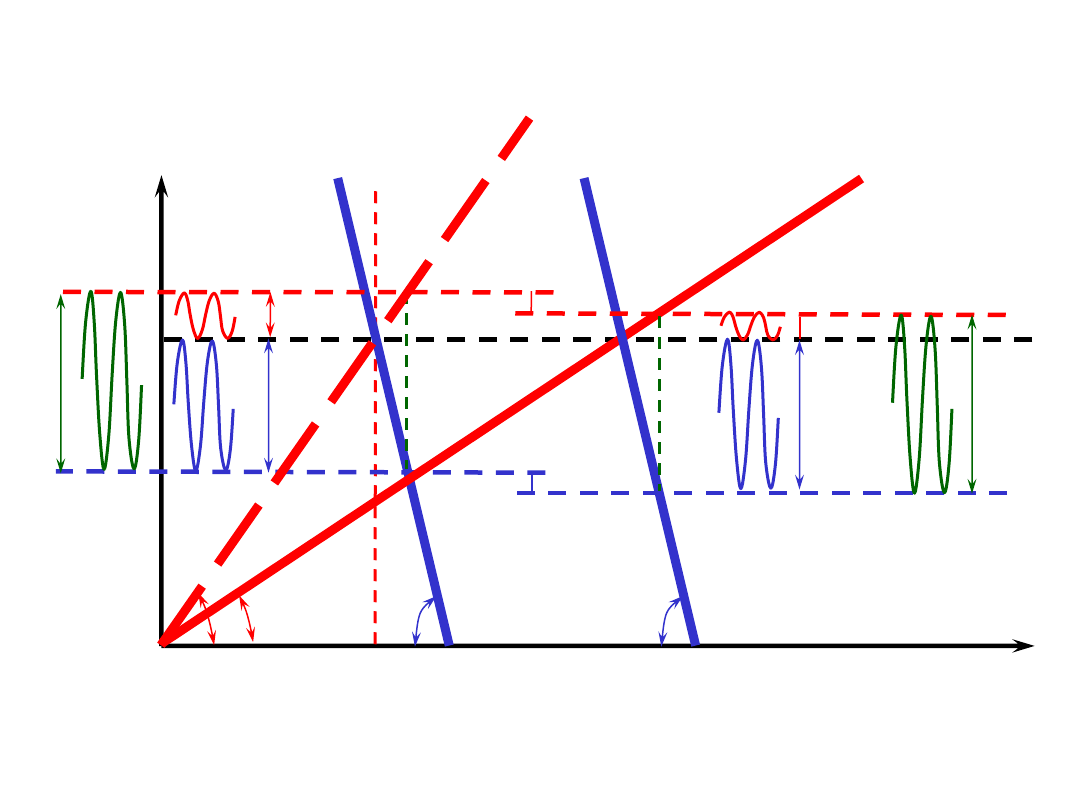
śruby z naciągiem wstępnym
– wzrost podatności śruby
β
ΔQ
p
ΔQ
ps1
ΔQ
pk1
ΔQ’
ps
< 0
ΔQ’
pk
> 0
α
1
α
Δ
l
Q
β
α
ΔQ
p
ΔQ
ps
ΔQ
pk
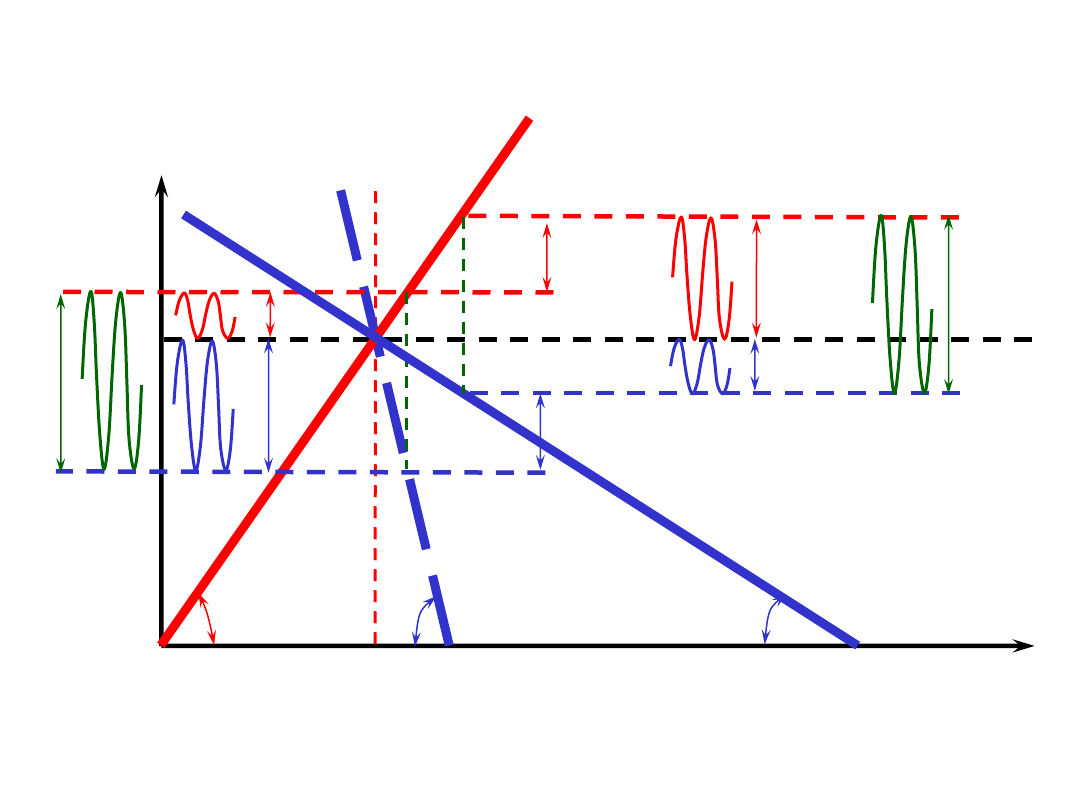
śruby z naciągiem wstępnym
– wzrost podatności konstrukcji
β
2
ΔQ
p
ΔQ
ps2
ΔQ
pk2
ΔQ’’
ps
> 0
ΔQ’’
pk
< 0
Q
w
śruby z naciągiem wstępnym
– określanie sztywności
s
s
s
s
s
s
s
l
E
A
E
A
l
Q
Q
l
Q
Cs
i
ki
ki
ki
i
ki
ki
ki
i
ki
E
A
l
E
A
l
Q
Q
l
Q
Ck
1
bez podkładki
z podkładką
śruby z naciągiem wstępnym
– określanie sztywności
g
1
+S
g
1
+S
g
2
+S
g
2
+S
(g
1
+g
2
)/2+S
S
g '
g '
g ''
g ''
1
2
p
1
2
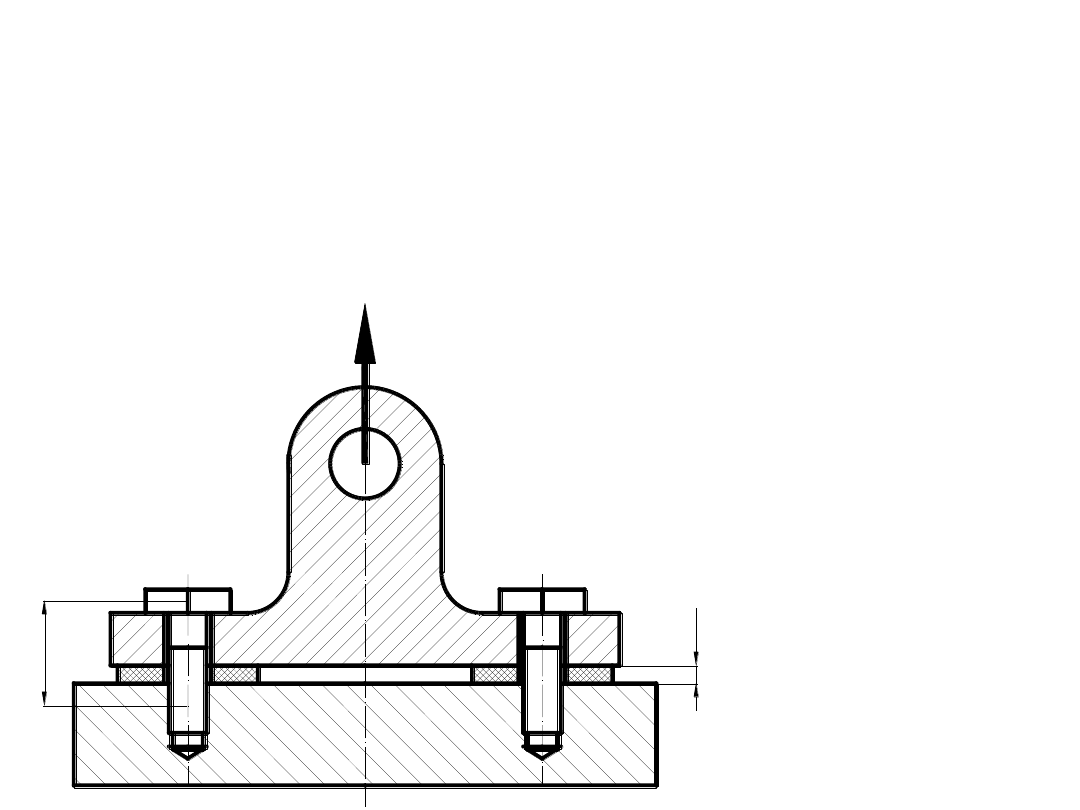
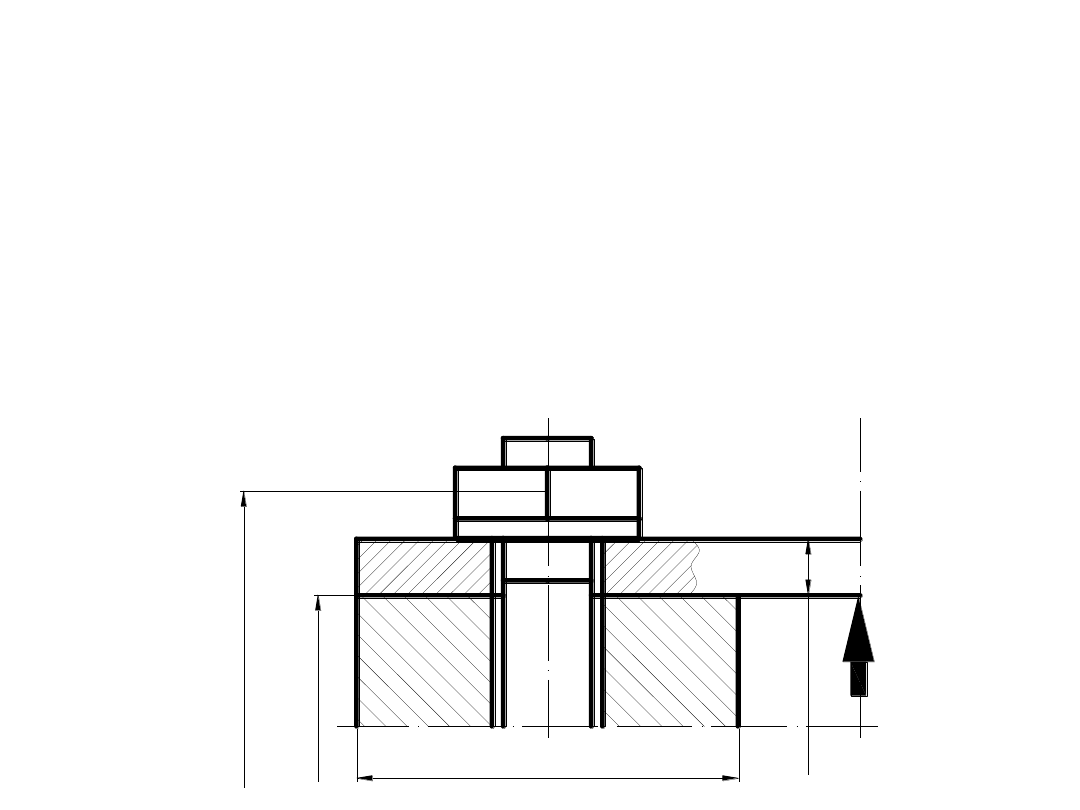
ZADANIE 2:
Okucie przedstawione na rysunku przymocowano do
podłoża dwiema stalowymi
śrubami M12x1,5 (E
s
=2,1
·10
5
MPa), o
długości czynnej l=20 mm, które podczas
montażu dokręcono, wywołując w każdej siłę naciągu wstępnego Q
w
=1,5 kN. Okucie
posadowiono na
podłożu na dwóch podkładkach o grubości g=5 mm, module Younga
E
p
=1
·10
3
MPa i powierzchni przekroju A
p
=15
·10
-4
m
2
.
Zakładając nieodkształcalność
okucia oraz
podłoża wyznaczyć:
1.
Maksymalną siłę Q
d1
którą można obciążyć okucie
aby nie
powstał luz pomiędzy okuciem a podkładką;
2.
Maksymalną siłę Q
d2
którą można obciążyć okucie
aby nie
powstał luz pomiędzy okuciem a łbem śruby;
3.
Wartość naciągu wstępnego śrub Q
wT
jeśli po
wprowadzeniu
naciągu wstępnego Q
w
temperatura
całej konstrukcji wzrośnie o ΔT=50 C, zaś wsp.
rozszerzalności liniowej okucia i śruby wynosi
α
s
=12
·10
-6
1/
ºC, a podkładki α
p
=24
·10
-6
1/
ºC
Przyjąć średnicę rdzenia
śruby d
r
=0,8
·d
g
l
Q
D
D
D
D
D
g
g
g
w
z
uw
uz
1
2
u
o
d
o
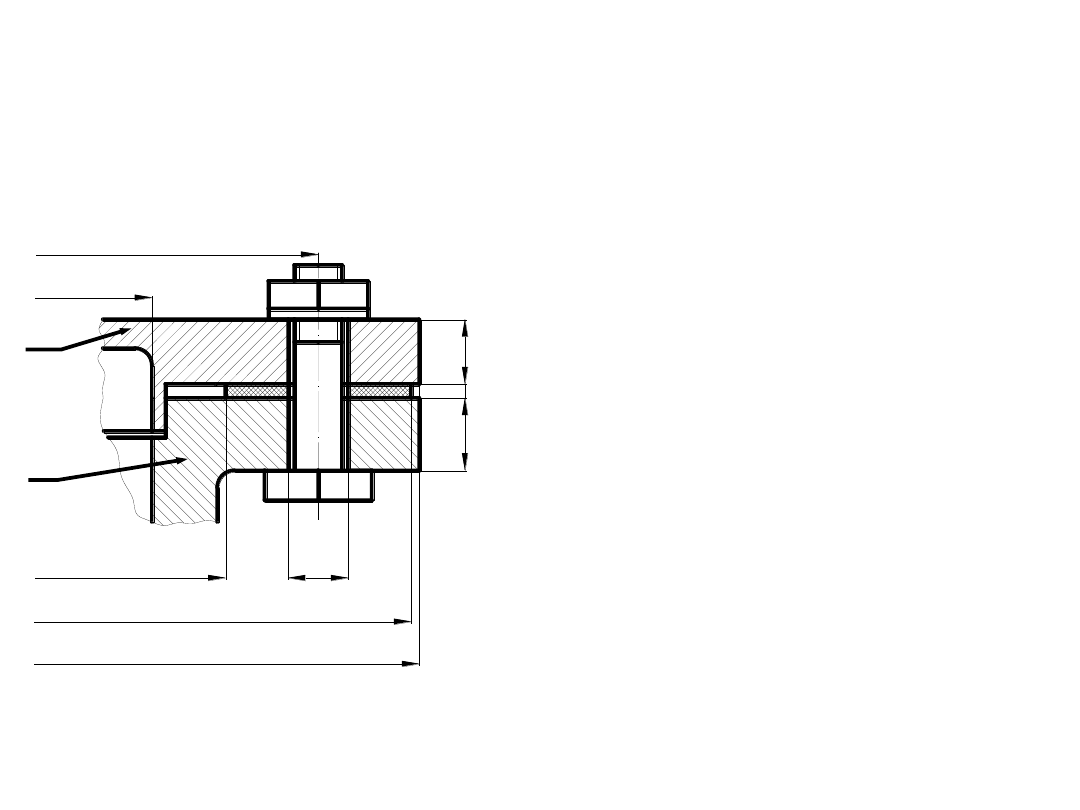
ZADANIE 3:
Pokrywa (1) otworu w zbiorniku
ciśnieniowym (2) dokręcona jest za pomocą N=16 śrub
M16, jak to przedstawiono na rysunku.
Śruby dokręcone zostały momentem M
s
=10 Nm
każda. Po zmontowaniu zbiornik wypełniony został parą po ciśnieniem. Współczynnik
tarcia
pomiędzy śrubą a nakrętką μ=0,1; pomiędzy nakrętką a podkładką μ
n
=0.
Obliczyć:
1.
Siłę naciągu wstępnego każdej ze śrub.
2. Maksymalne
ciśnienie
dopuszczalne
w
zbiorniku
p
max
takie,
aby
na
powierzchni uszczelki
pozostały naciski
resztkowe p
u
=2 MPa.
Pominąć wpływ
ciśnienia pary działającej na uszczelkę.
3. Maksymalne
naprężenia rozciągające
w
śrubie σ
r
przy
działaniu ciśnienia p
max
.
Założyć, że cała uszczelka o module Younga
E
u
=5
·10
3
MPa podlega jednakowemu
ściskaniu,
moduł Younga śruby wynosi E
s
=2,1
·10
5
MPa,
zaś zbiornik i pokrywa są nieodkształcalne.
D
0
=280 mm; D
w
=220 mm; D
z
=320 mm; D
uw
=245 mm; D
uz
=315 mm;
g
1
=12 mm; g
2
=14 mm; g
u
=3 mm; d
0
=18 mm;
dane gwintu: d=16 mm; P=2 mm; d
2
=14.701 mm; d
1
=13,835 mm; d
3
=13,546 mm
1
2
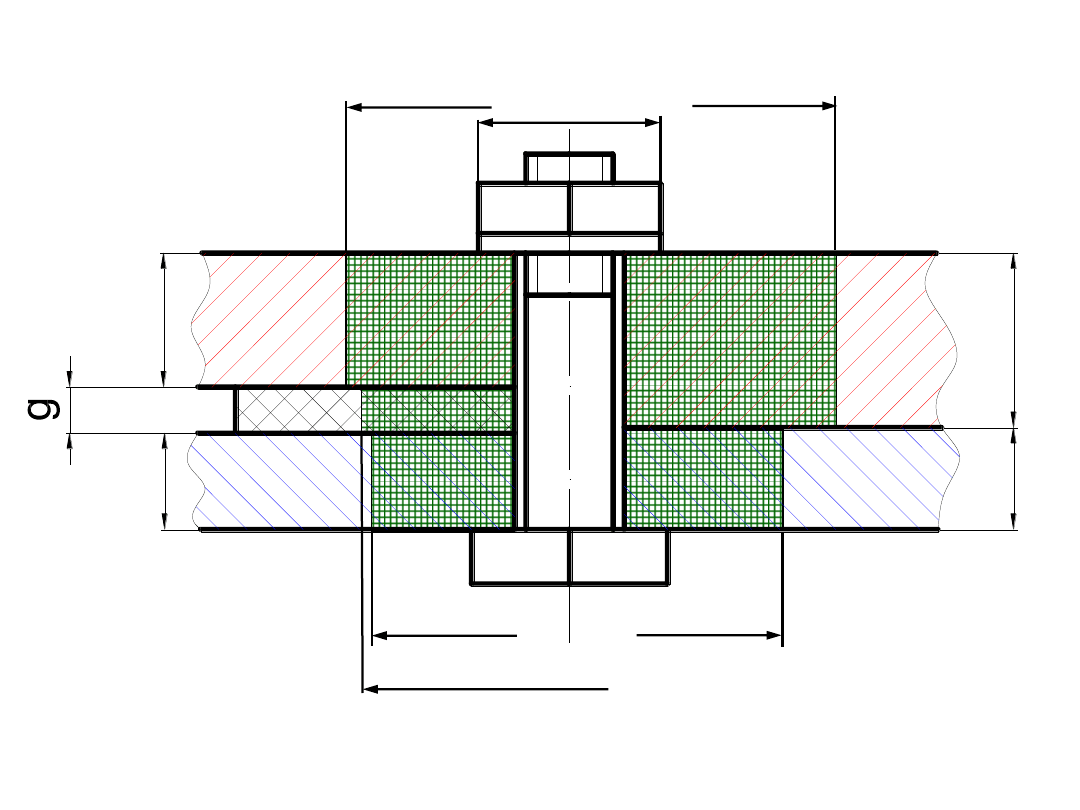
ZADANIE 4:
Pokazany na rysunku mechanizm
śrubowy składa się z dwóch płyt 1 i 2 oraz śruby o
gwintach jednozwojnych Tr32x6. Gwinty
są odpowiednio prawy i lewy jak zaznaczono
na rysunku. Wymiary gwintu podane
są na rysunku i w tabeli, współczynnik tarcia na
powierzchni gwintu
μ=0,1.
1.
Wyznaczyć moment M
s1
jakim
należy obracać śrubę aby siła normalna w śrubie
wynosiła Q
1
=-20 kN?
2.
Narysować wykres siły i momentu skręcającego w śrubie.
3.
Wyznaczyć maksymalne naprężenia zredukowane w śrubie.
4. Jakie
muszą być minimalne grubości płyt g aby naciski na powierzchnię gwintów nie
przekroczyły p
dop
=20 MPa?
5. Jak zmieni
się rozwiązanie jeśli oba gwinty będą prawoskrętne?
d
P
d
2
=D
2
d
3
D
1
D
32
6
29
25
26
33
1
2
gwint prawy
gwint lewy
M
s
g
ZADANIE 5:
Prasa
tunelowa
o
schemacie
pokazanym
na
rysunku
składa
się
z
dwóch kolumn (1), dwóch trawers (2) i dwóch śrub (3). Wymiary śrub: d=120 mm,
d
3
=100 mm.
Montaż odbywa się tak, że śruby podgrzane do temp. T
1
=120
wkłada się w
otwory i
dokręca się nakrętki do skasowania luzów. Studzenie śrub powoduje powstanie
naciągu wstępnego w układzie. Temperatura prasy w trakcie pracy T
2
=20 .
Materiałem
kolumn i trawers jest
żeliwo Żl-35 (E
z
=1
·10
5
MPa,
α
z
= 10
·10
-6
1/ C).
Śruby wykonano ze
stali 45 (E
s
=2
·10
5
MPa,
α
s
= 120
·10
-6
1/ C).
Wyznaczyć zakres zmienności sił w śrubach gdy siła Q
d
zmienia
się od
0 do 1000 kN.
Uwaga: dla uproszczenia
przyjąć że trawersy są idealnie sztywne na zginanie i ściskanie.
g2=100
g1=300
kwadrat 200x200
ls=550
Qd
Wyszukiwarka
Podobne podstrony:
PKM sruba
PKM sruba
D Studiowe PKM śruba moja Model (1)
PKM sruba zadania
PKM sruba
D Studiowe PKM śruba moja Model (1)
Projekt śruba rzymska 1, AGH WIMIR AiR, Semestr 4, PKM, materiały na projekty, projekt 2
PKM 2 1z wws wstep
PKM NOWY W T II 11
por´¬Żd fizjologiczny ss
PKM lozyska slizgowe
więcej podobnych podstron