Opis ruchu
1. Układ odniesienia, położenie i tor punktu materialnego.
2. Przemieszczenie.
3. Prędkość i przyśpieszenie.
cinew
- kineo (poruszam się)
kinematyka – nauka o ruchu (bez wskazania przyczyny ruchu)
1. Układ odniesienia – ciało lub układ ciał, względem których opisywane jest
położenie badanego ciała (z wybranym układem odniesienia wiąże się na ogół układ
współrzędnych).
2. Ruch – zmiana położenia ciała względem innego ciała (układu odniesienia).
3. Punkt materialny – punkt obdarzony masą. Jest modelem obiektu fizycznego,
którego rozmiary pomijamy. Ciało traktujemy jako punkt materialny wtedy, kiedy
odległości pokonywane przez to ciało są o wiele większe od jego rozmiarów, a jego
struktura wewnętrzna nie ma znaczenia dla opisu jego zachowania.
4. Tor – linia zakreślana przez obrany punkt poruszającego się ciała w danym
układzie odniesienia.
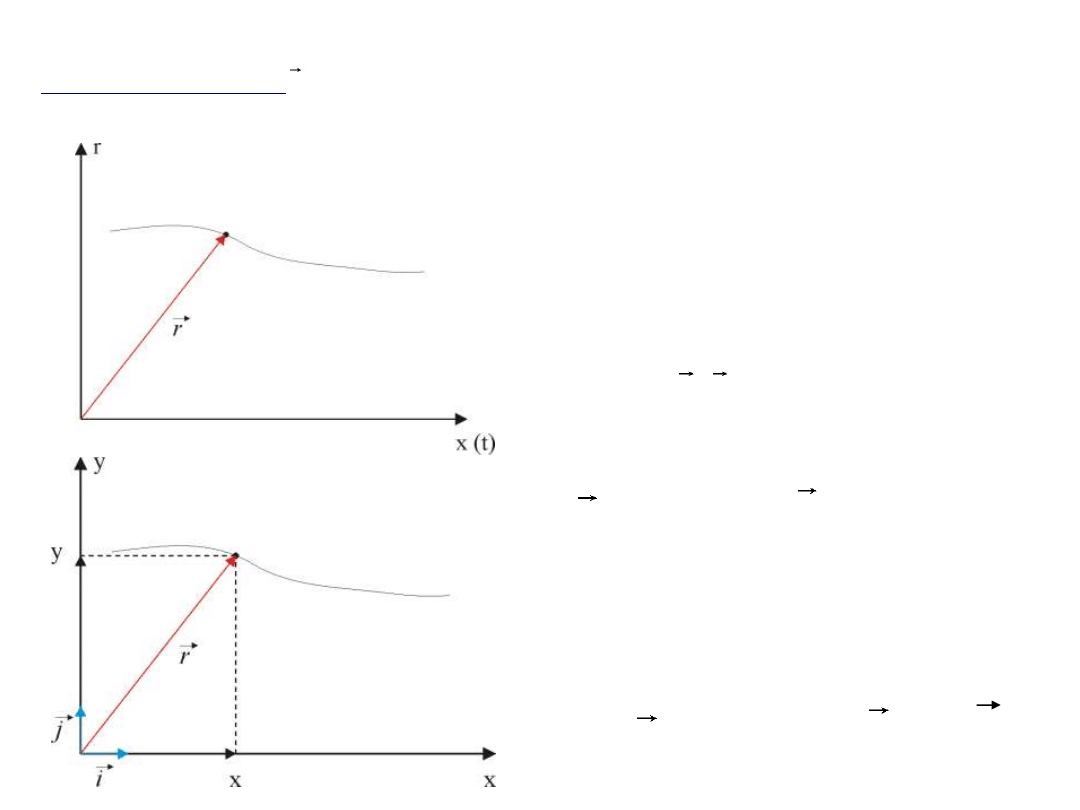
Wektor położenia - wektor, którego początek znajduje się w początku
układu współrzędnych, a koniec w punkcie położenia ciała w danej chwili.
r
( )
r
f t
- wektory
jednostkowe
,
i j
W przestrzeni trójwymiarowej:
r
x i
y j
r
x i
y j k z
z
.
k
0
0
lim
śr
ch
t
ch
x
y
r
x i
y j
r
v
t
t
r
v
t
dr
v
dt
dr
dx
dy
i
j
dt
dt
dt
dr
v i
v
j
dt
t
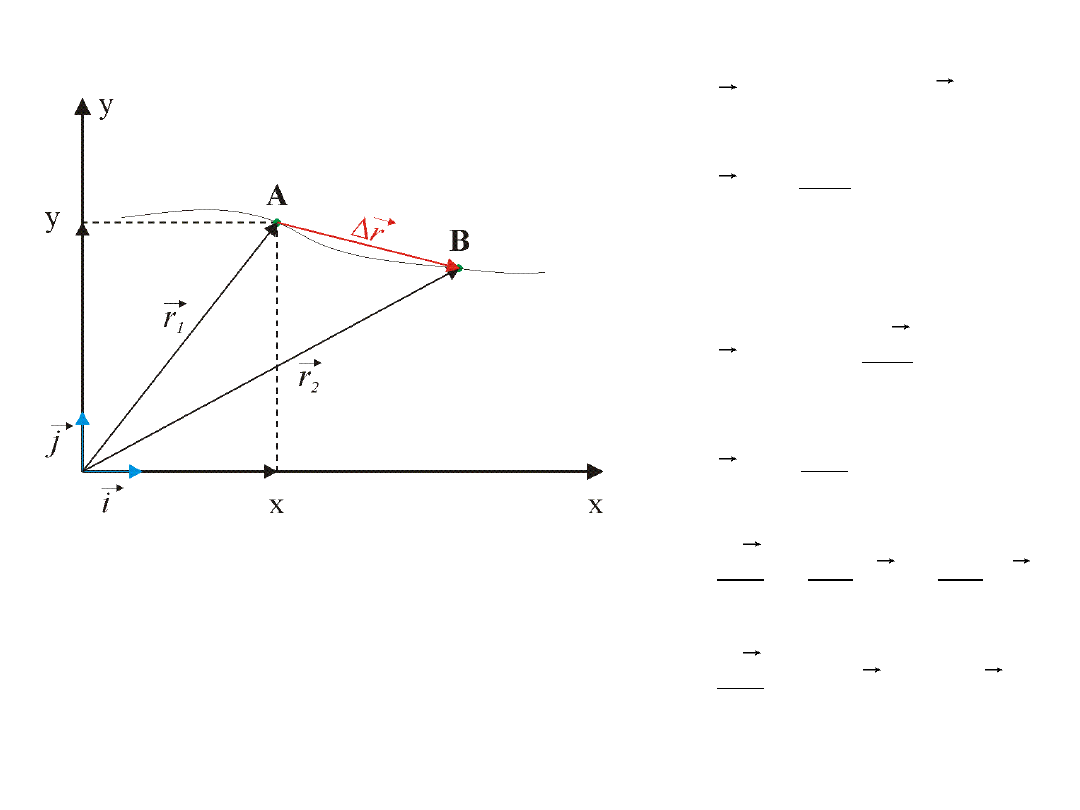
Przemieszczenie - wielkość wektorowa
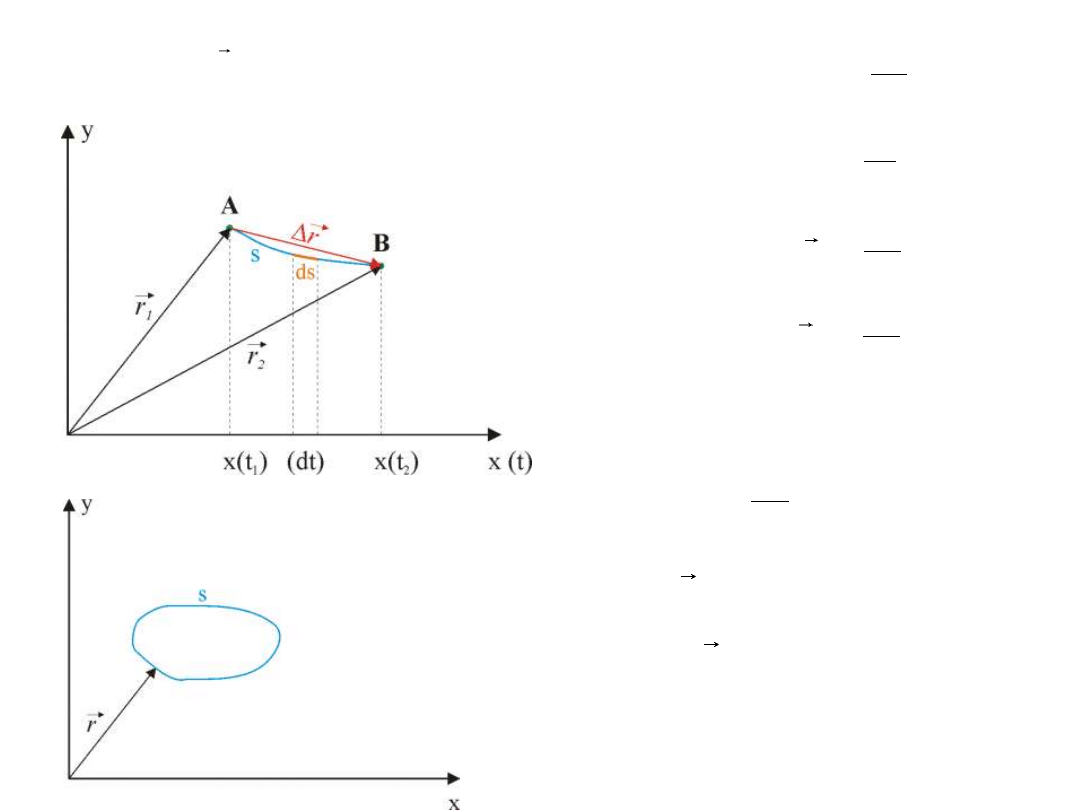
Droga
s
– wielkość skalarna (długość toru)
r
Szybkość średnia:
Szybkość chwilowa:
Prędkość średnia:
Prędkość chwilowa:
śr
s
v
t
0
0
śr
śr
s
v
t
v
r
ch
ds
v
dt
śr
r
v
t
śr
dr
v
dt
ch
0
lim
ch
t
y
x
x
y
v
dv
a
t
dt
dv
dv
dv
a
i
j
dt
dt
dt
a a i
a j
śr
v
a
t
Przyśpieszenie średnie:
Przyśpieszeni chwilowe:
ch
dv
a
dt
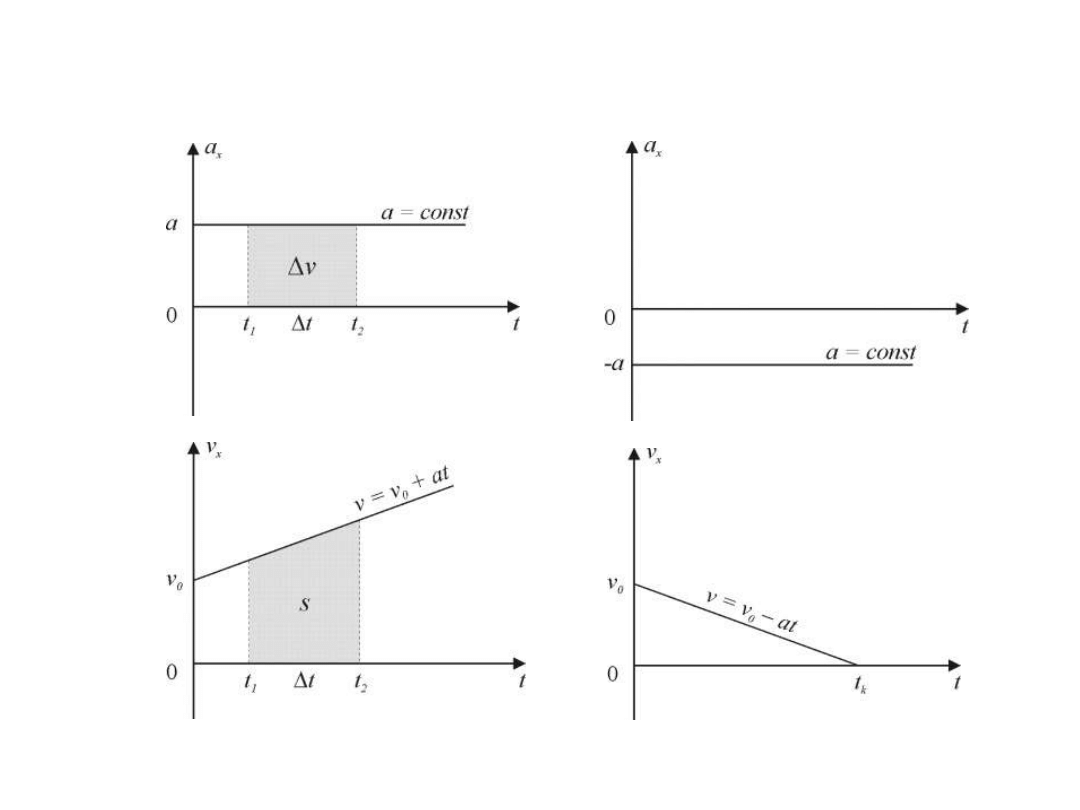
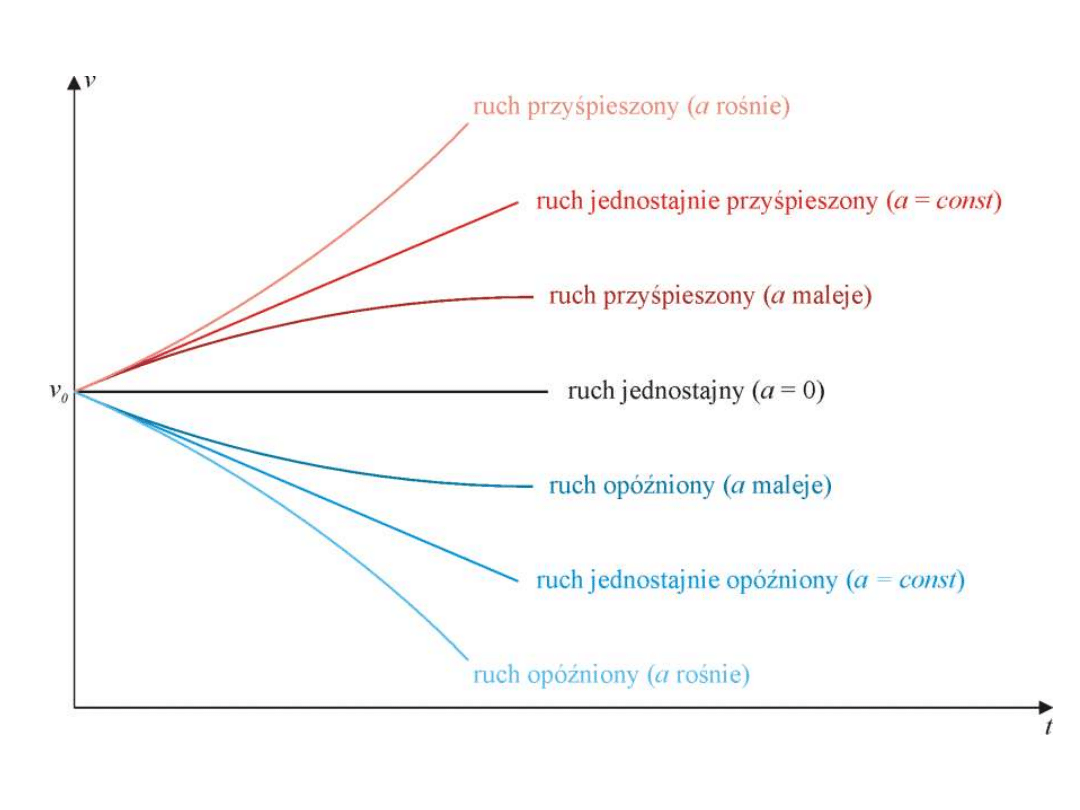
Ruch jednostajnie przyśpieszony
Ruch jednostajnie opóźniony
v=a
.
t
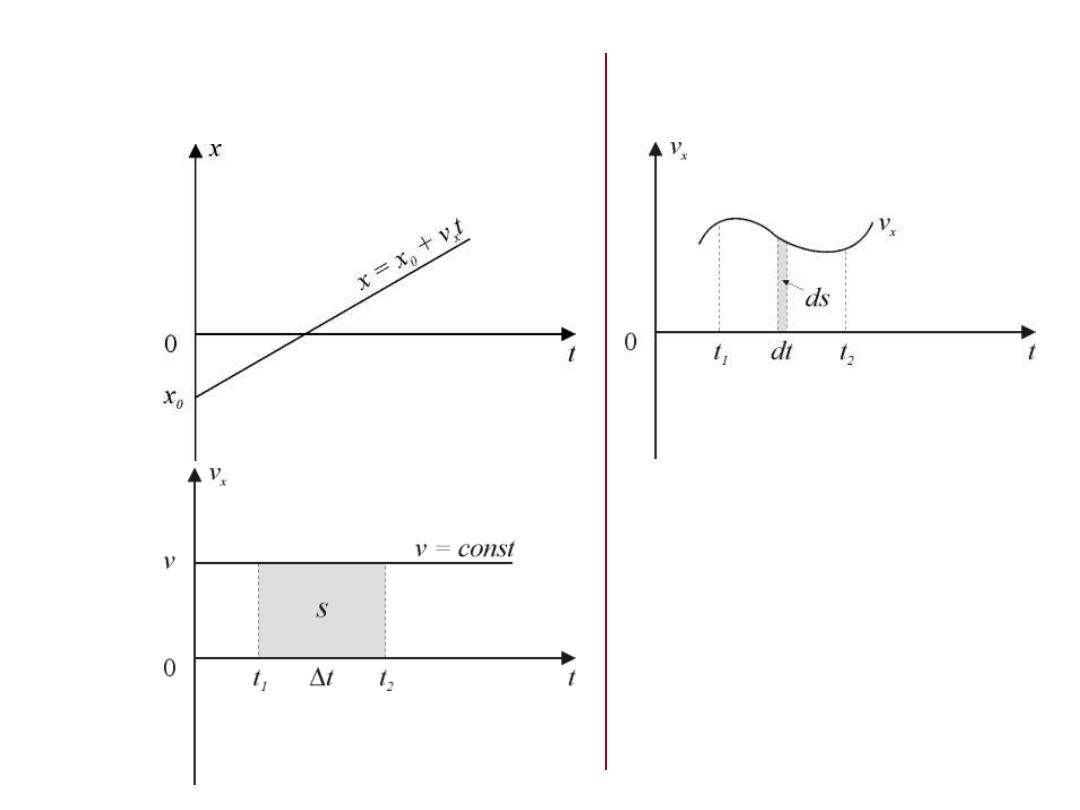
Ruch jednostajny, prostoliniowy
v=const
Ruch niejednostajny, prostoliniowy
vconst
s=v
.
t
dt
v
ds
x
2
1
t
t
x
dt
v
s
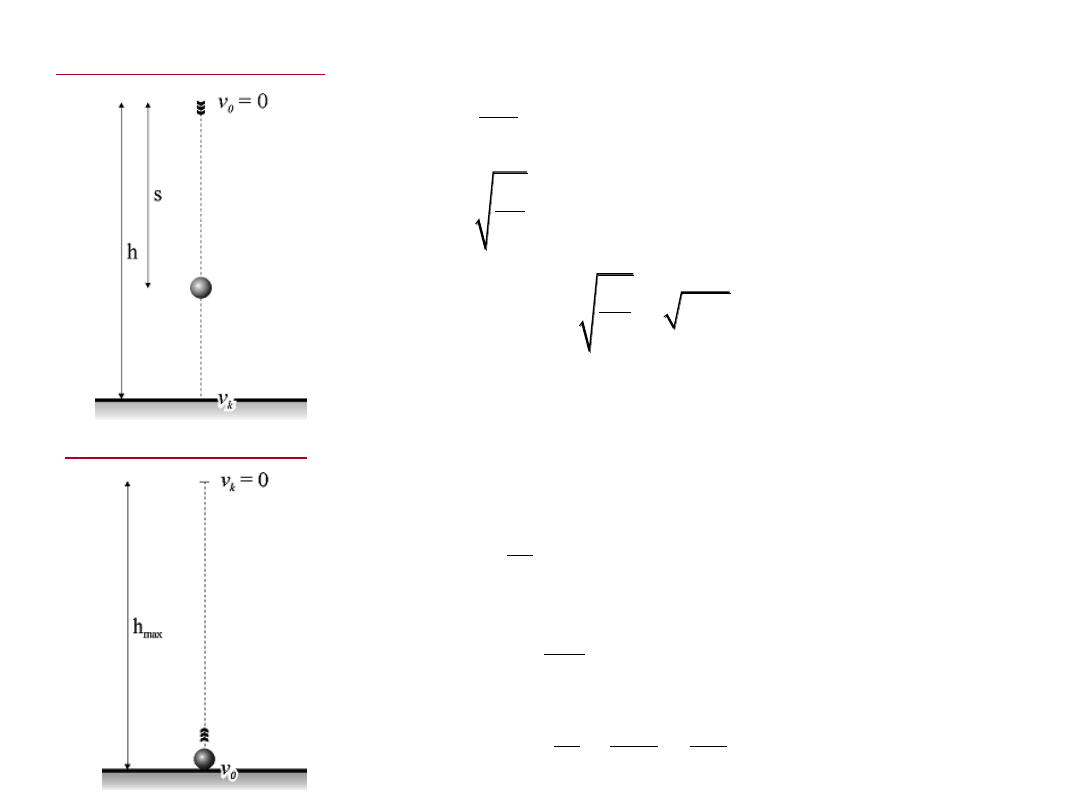
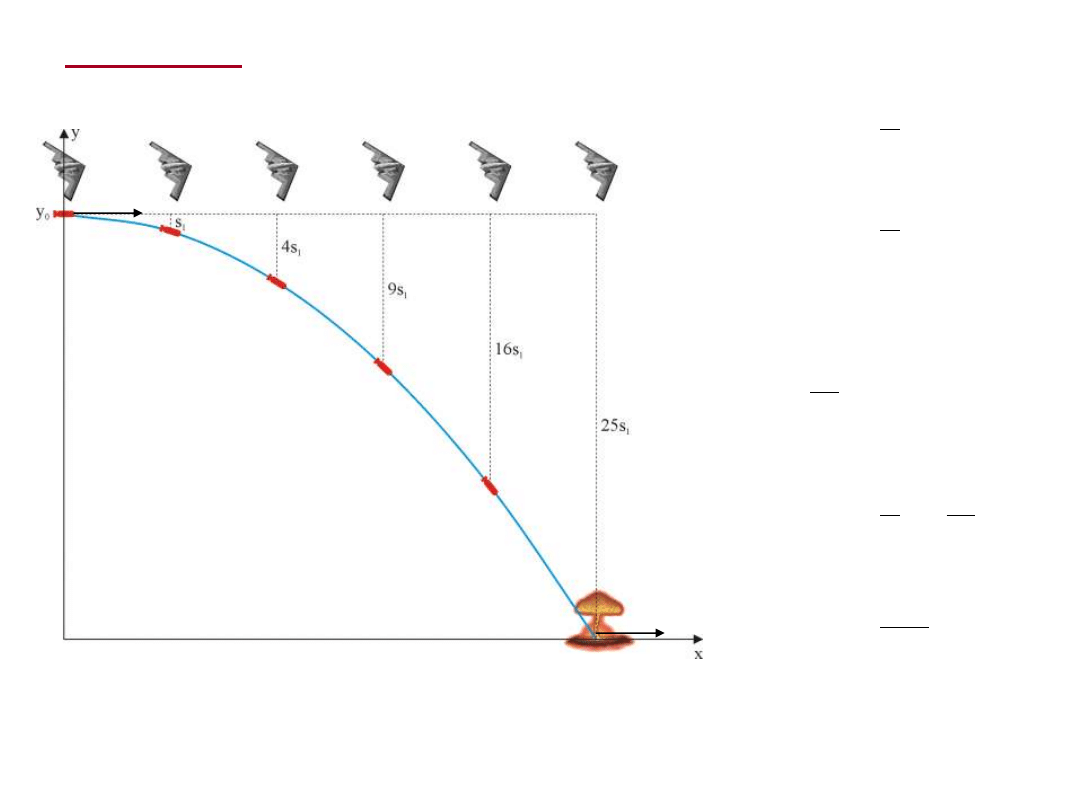
Swobodny spadek ciał
2
2
2
2
2
k
a g
gt
s
s
t
g
h
v
g t g
gh
g
Rzut pionowy do góry
0
0
2
0
2
2
0
0
0
max
0
2
0
2
2
2
k
wzn
wzn
a
g
v
v
gt
v
t
g
gt
s v t
v
gv
v
h
v
g
g
g
-
-
-
-
2
0
2
0
0
0
2
0
0
2
0
2
0
1
2
1
2
1
2
2
y
y
gt
y y
gt
x v t
x
t
v
x
y y
g
v
g
y y
x
v
-
-
-
-
równanie paraboli
Rzut poziomy
v
0
v
0
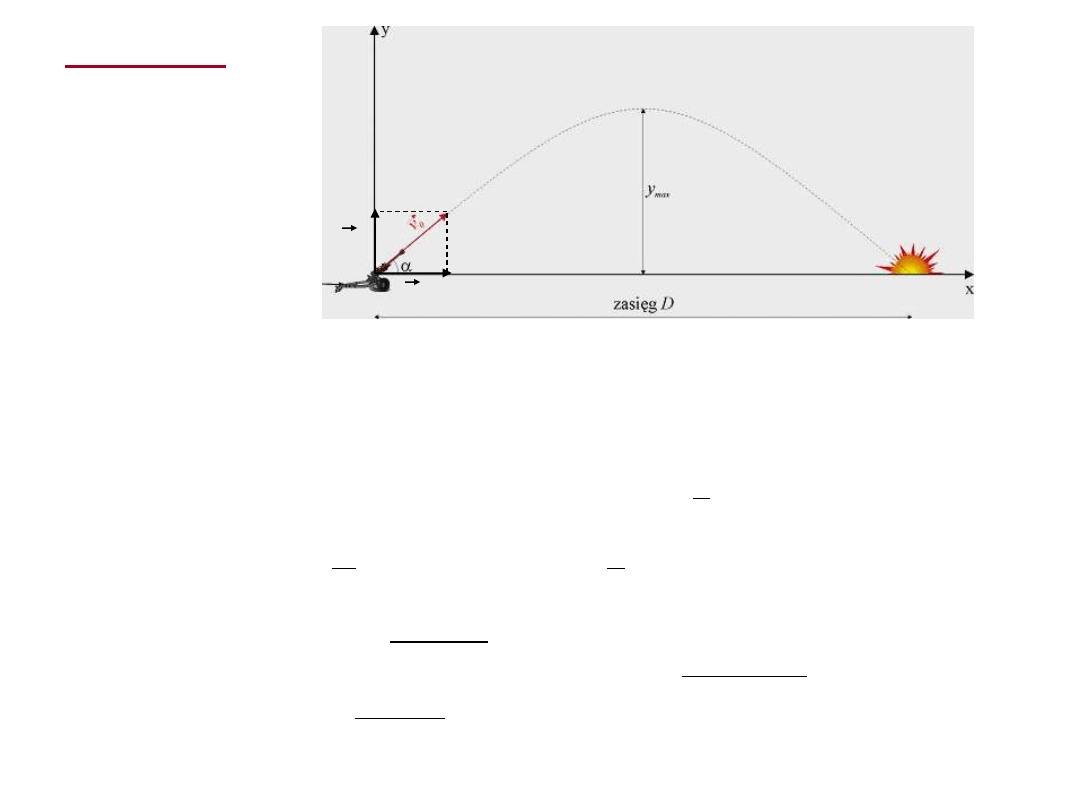
Rzut ukośny
0
0
cos
sin
ox
oy
v
v
v
v
2
0
( )
1
( )
2
x
ox
y
oy
a
x t
v t
a
g
y t
v t
gt
-
-
2
0
max
sin 2
(
)
4
v
D
D
g
2
2
0
max
sin
2
v
y
g
Składowe prędkości
początkowej:
Składowe przyśpieszenia:
Zasięg:
Wzniesienie maksymalne:
Czas trwania ruchu:
0
2 sin
v
t
g
równanie paraboli
2
2
2
0
tg
2 cos
g
y
x
x
v
-
v
0y
v
0
x
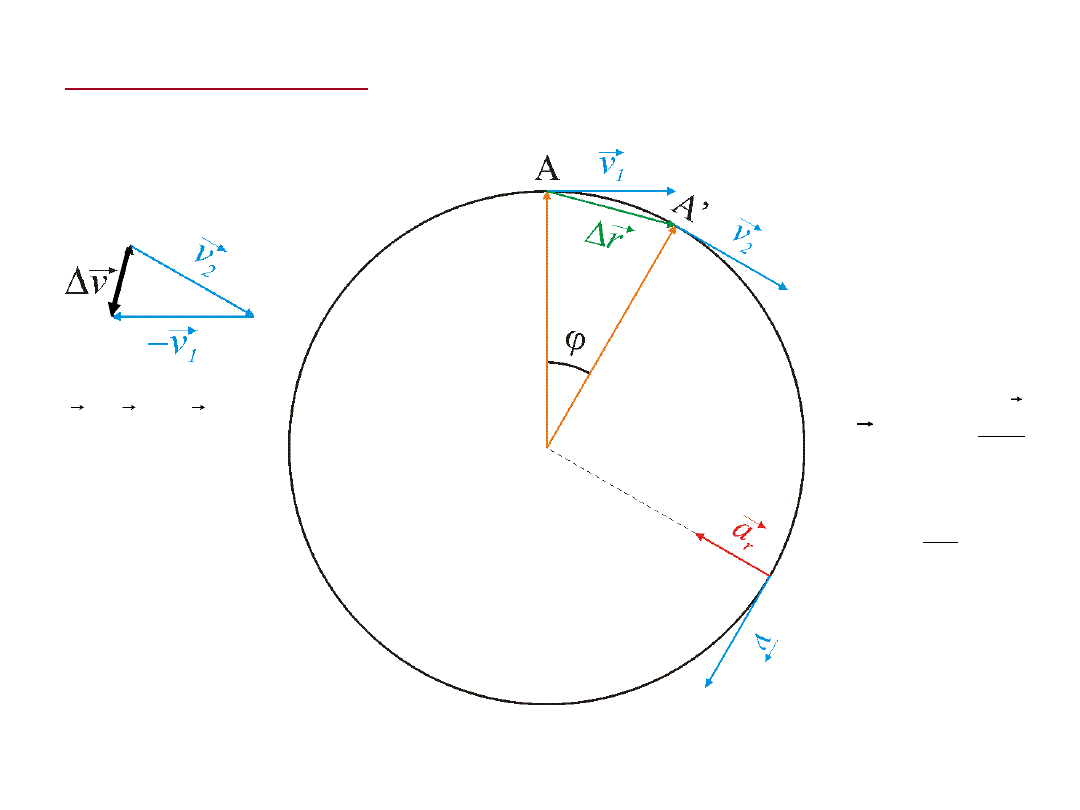
Ruch jednostajny po okręgu
2
1
v v
v
-
1
2
v
v
v const
0
2
lim
r
t
r
v
a
t
v
a
t
r
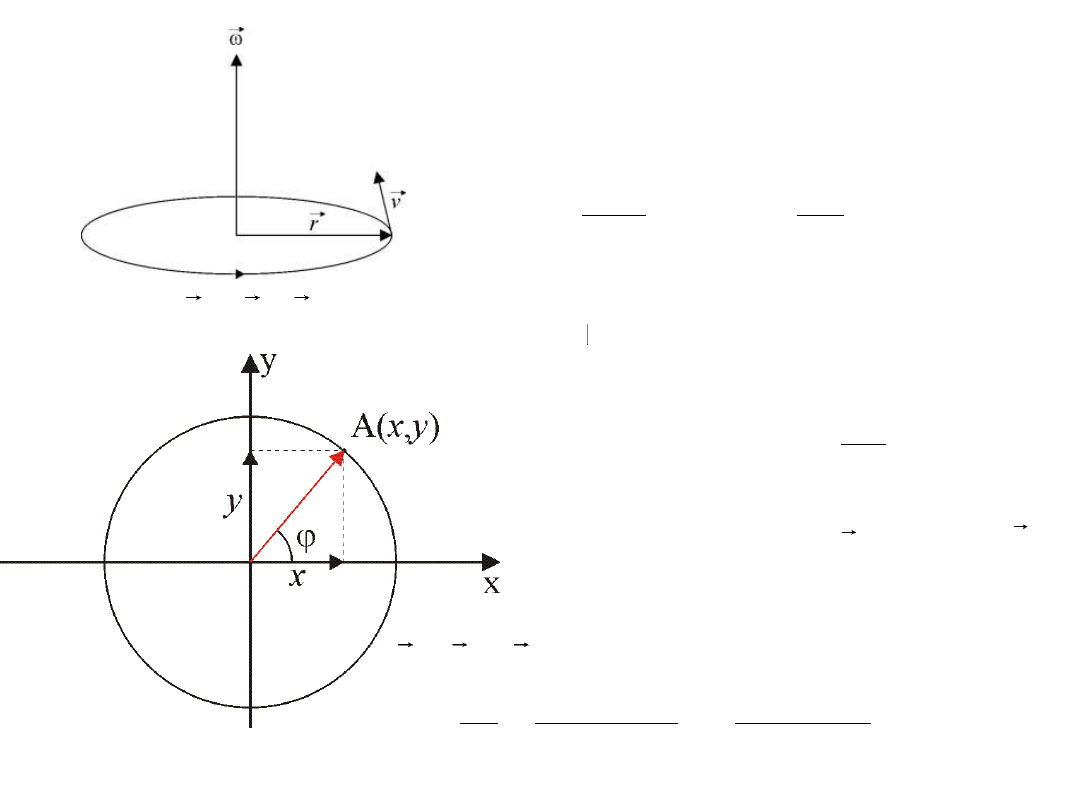
v
r
w
v – prędkość liniowa
w – prędkość kątowa
T - okres
2
2
r
v
T
T
v
r
w
w
t
t
d
dt
d
dt
w
w
w
cos
sin
x r
r
x i
y j
y r
( cos )
(cos
)
sin
cos
x
y
x
y
v
v
v
dx
d r
d
t
v
r
r
t
dt
dt
dt
v
r
t
w
w
w
w
w
-
~
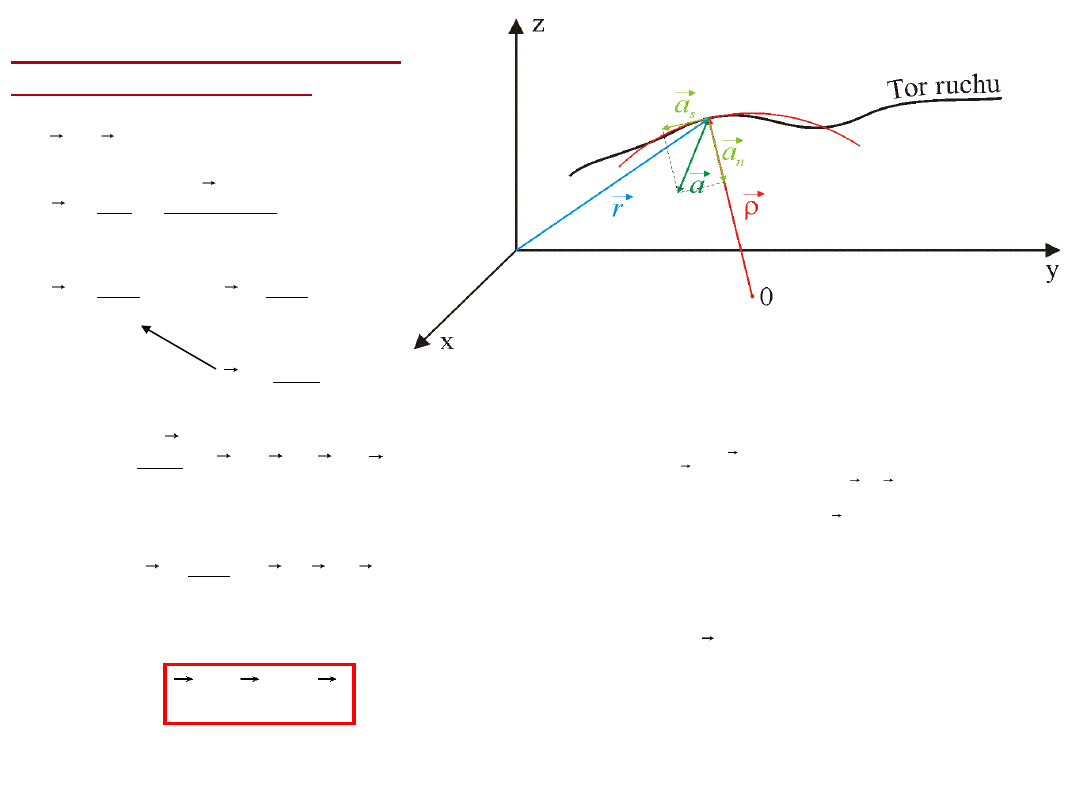
Przyśpieszenie styczne i normalne
w ruchu krzywoliniowym
(
)
v
dv
d
a
dt
dt
d
d
a
dt
dt
w
w
w
w
d
dt
w
e
s
d
a
dt
w e
e
w
e
v
n
d
v a
dt
w
w
przyśpieszenie
kątowe
przyśpieszenie
styczne
kierunek i jest do
płaszczyzny ruchu, więc
ma ten sam kierunek co
przyśpieszenie
normalne
leży w płaszczyźnie
ruchu i ma ten sam
kierunek co promień
krzywizny , a zwrot
zawsze przeciwny
s
n
a a
a
Przyśpieszenie dośrodkowe w ruchu po okręgu
2
2
2
(
)
(
)
(
)
0, gdyż
n
n
n
n
n
r
a
v
r
a
r
r
r
r
a
r
v
a
a
r
v
r
w
w w
w w
w w
w
w
w
w
w
-
-
)
(
)
(
)
(
b
a
c
c
a
b
c
b
a
-
przyspieszenie dośrodkowe
Wyszukiwarka
Podobne podstrony:
Fizyka 02, 1 Ruch liniowy i obrotowy
Fizyka 02, 1 Ruch liniowy i obrotowy
02 ruch konspekt
02 Ruch jednowymiarowy (10)
02 Ruch jednowymiarowy
02 ruch jednowymiarowy
Ruch obrotowy bryly = 2, Piotr Mazur______ Rzesz?w 27.02.1996
Ruch obrotowy bryly = , Piotr Mazur______ Rzesz?w 27.02.1996
prezentacja Ruch konsumencki
Wyk 02 Pneumatyczne elementy
02 OperowanieDanymiid 3913 ppt
więcej podobnych podstron