m
θ
)
(t
θ
2
θ
1
θ
śr
θ
0
θ
z
θ
w
θ
a
τ
b
τ
τ
0
T
T
T
T
t
śr
e
h
1
e
2
e
A
0
T
t
)
(t
p
0
wył
−
.
1
zał
−
.
0
t
1
t
2
t
3
t
5
t
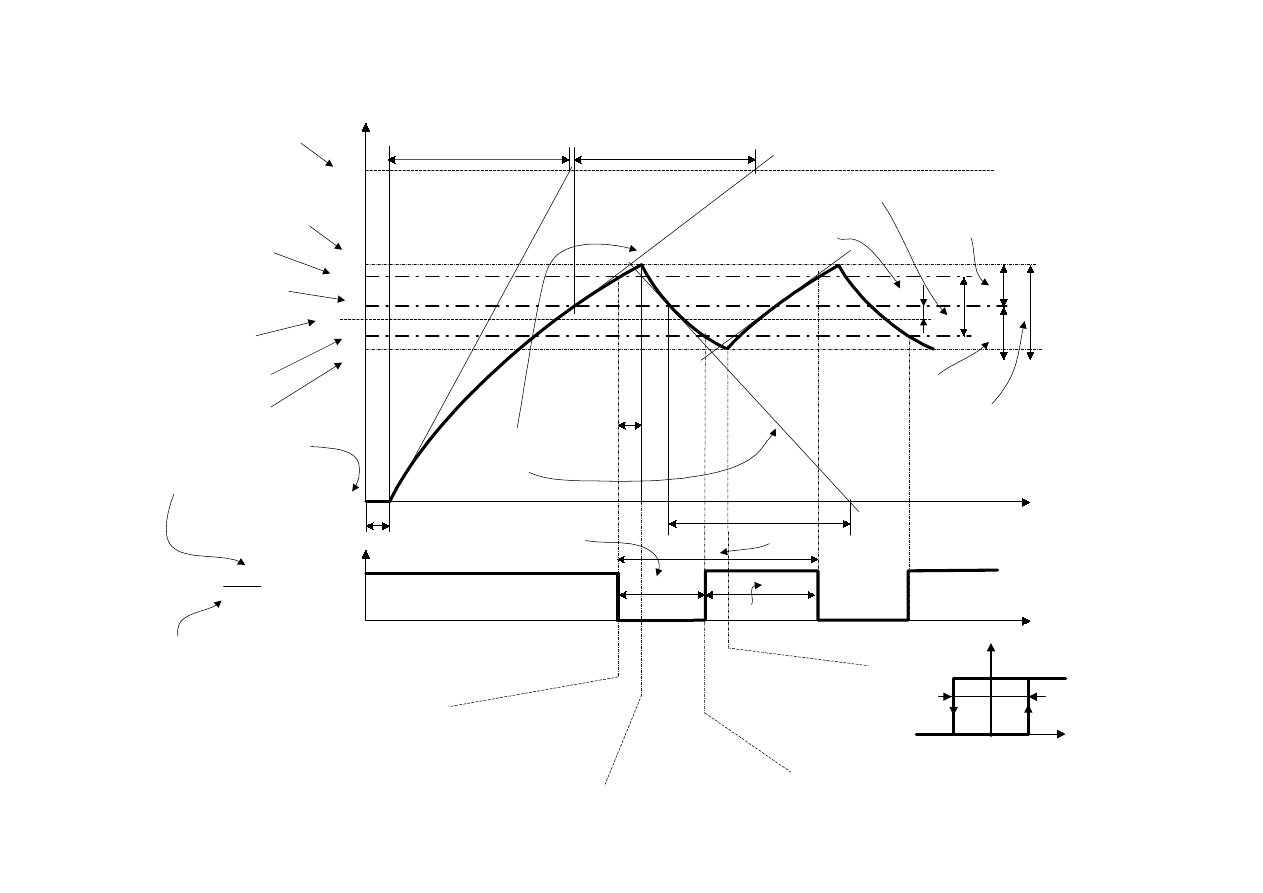
maksymalna
temperatura
pieca
temperatura maksymalna regulacji
temperatura minimalna regulacji
temperatura wyłączenia
przekaźnika
temperatura załączenia
przekaźnika
temperatura średnia regulacji
temperatura zadana
(t
0
- t
1
)- przekaźnik załącza
grzałkę pieca, aż temperatura
pieca nie przekroczy temperatury
wyłączenia przekaźnika
(t
1
- t
2
)- przekaźnik w stanie
wyłączonym lecz temperatura
pieca dalej rośnie z powodu
opóźnienia T
0
4
t
(t
2
- t
3
)- przekaźnik
wyłączony, aż do
osiągnięcia temperatury
załączenia
(t
3
- t
4
)- przekaźnik w stanie
załączonym lecz temperatura pieca
dalej maleje z powodu opóźnienia T
0
zakres drgań
histereza statyczna
przekaźnika
średni błąd regulacji
maksymalny błąd dodatni
maksymalny błąd ujemny
p
h
z
θ
w
θ
0
θ
1
0
θ
charakterystyka statyczna
przełączeń
czas załączenia
czas wyłączenia
okres wahań
proste aproksymujące przebieg
wykładniczy
(do celów obliczeniowych)
T- zastępcza stała czasowa pieca
uzyskana przy aproksymacji
parametrów dynamicznych pieca
układem inercyjnym I rzędu z
opóźnieniem
T
0
- zastępcze opóźnienie uzyskane
przy aproksymacji parametrów
dynamicznych pieca układem
inercyjnym I rzędu z opóźnieniem
;
)
(
1
Ts
ke
s
G
0
sT
+
=
−
ot
θ
temperatura otoczenia
Rys. 6.5. Graficzna analiza pracy regulatora dwupołożeniowego regulującego temperaturę w piecu elektrycznym
Wyszukiwarka
Podobne podstrony:
aislab-rdrys
aislab dn
aislabab cs id 53530 Nieznany (2)
aislab rn id 53528 Nieznany (2)
aislab rd
aislab cf id 53526 Nieznany
AiSLab-SK, Studia, Studia I-stopień, Automatyka
aislab sk id 53529 Nieznany (2)
AiSLab-RN, Studia, Studia I-stopień, Automatyka
AiSLab-DN, Studia, Studia I-stopień, Automatyka
aislab dn
więcej podobnych podstron