Dynamika ruchu obrotowego bryły sztywnej
Wyznaczanie momentu bezwładności
Ćw.2
Cel ćwiczenia
Sprawdzenie słuszności równania dynamiki ruchu obrotowego
ε = M/I oraz wyznaczenie momentu
bezwładności przyrządu do badania ruchu obrotowego.
Zakres obowiązującego materiału teoretycznego
Kinematyka i dynamika ruchu obrotowego. Moment bezwładności, moment siły, moment pędu, środek
masy, twierdzenie Steinera. Zasada zachowania momentu pędu.
Przyrządy użyte w ćwiczeniu
Suwmiarka, sekundomierz, przyrząd do badania ruchu obrotowego (PBRO).
Wprowadzenia i aparatura
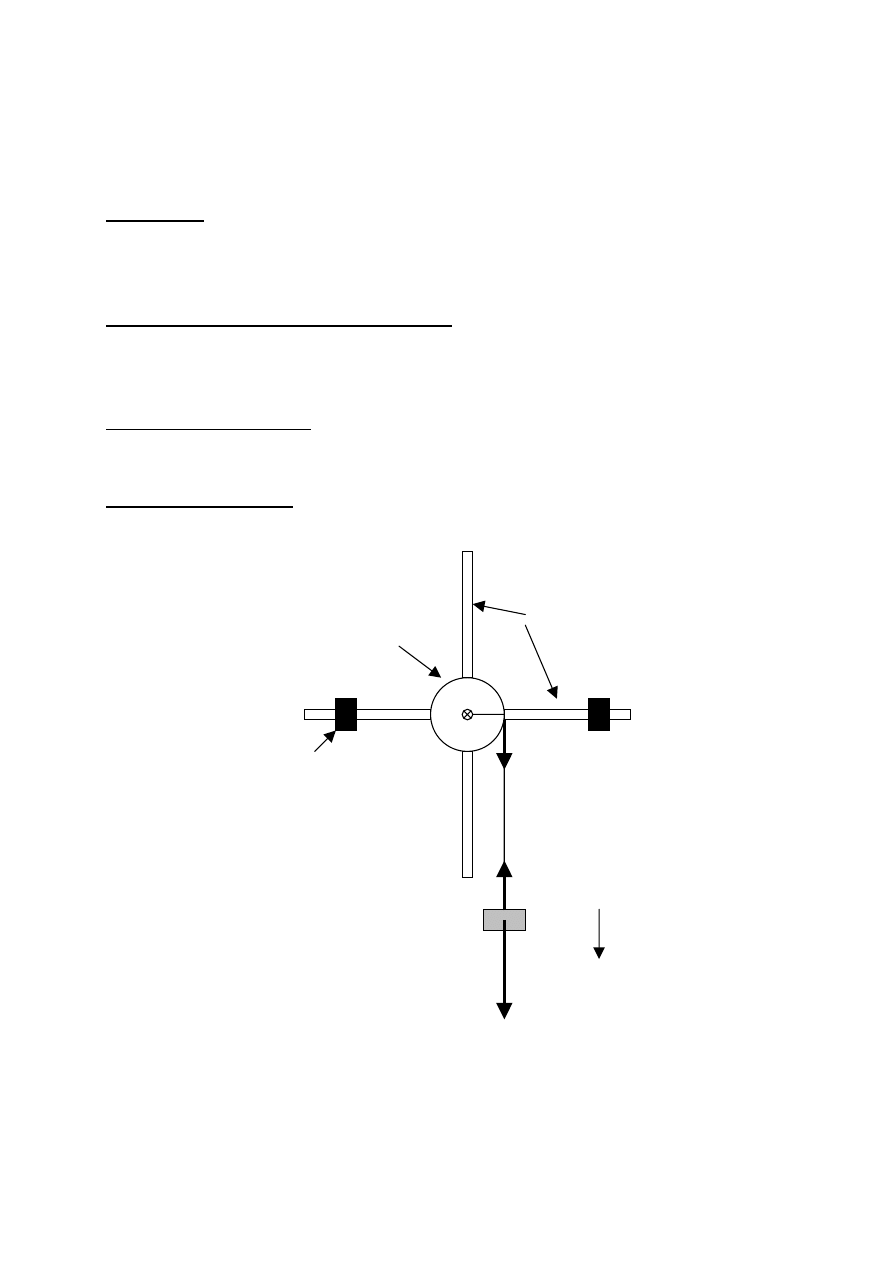
W doświadczeniu posługujemy się przyrządem do badania ruchu obrotowego, zilustrowanym na rys.1
M
r
Q
r
N
r
ar
N
r
P
C
W
a=F/m
F=Q-N
Q=mg
r
1
Rys.1
Walec metalowy C jest osadzony na łożyskach kulkowych i może obracać się wokół osi OO'. Z
walcem połączone są cztery pręty stalowe P, na których osadzone są walce W. Walce W można
przemieszczać wzdłuż prętów i zmieniać w ten sposób moment bezwładności urządzenia. Chcąc
wprowadzić przyrząd w ruch obrotowy obciążamy nić masą m.
Druga zasada dynamiki Newtona dla ruchu obrotowego ma postać:
I
M
=
ε
(1)
Gdzie:
M - moment wypadkowy działających sił
I - moment bezwładności urządzenia PBRO
ε- przyspieszenie kątowe
Sprawdzenie słuszności równania (1), co jest głównym celem ćwiczenia, dokonujemy w następujący
sposób. Dla warunków doświadczalnych wynikających z geometrii i dynamiki urządzenia PBRO
wyliczamy na drodze teoretycznej wartości:
1 - momentu wypadkowego działających sił M
2 - momentu bezwładności urządzenia PBRO - I
3 - przyspieszenia kątowego
ε urządzenia PBRO.
Wyliczone wartości I, M oraz
ε podstawiamy do równania (1) otrzymując wyrażenie, którego słuszność
potwierdzamy na drodze doświadczalnej.
Moment siły T
W omawianym przypadku, moment siły naciągu N jest momentem obrotowym M i wyraża się wzorem:
N
r
M
1
=
;
N
ma
mg
−
=
(2)
Gdzie:
r
1
- promień tej części walca C na której nawinięta jest nić.
N - siła naciągu nici.
m - masa ciężarka.
Moment bezwładności urządzenia PBRO
Moment bezwładności urządzenia PBRO jest sumą:
-
momentu bezwładności walca C - I
c
;
-
momentu bezwładności czterech prętów P - 4I
p
;
-
momentu bezwładności dwóch ruchomych walców W równego 2I
w
+ 2m
w
(d/2)
2
Masa walca W oznaczona jest symbolem m
w
, a d jest odległością przeciwległych walców. I
w
jest
momentem bezwładności walca ruchomego względem osi przechodzącej przez jego środek masy i
wynikającym z twierdzenia Steinera.
Całkowity moment bezwładności urządzenia PBRO wynosi wiec:
2
d
m
I
2
I
4
I
I
2
w
w
p
c
+
+
+
=
(3)
a wprowadzając oznaczenie
w
p
c
o
I
2
I
4
I
I
+
+
=
otrzymamy
2
d
m
I
I
2
w
o
+
=
(3)
I
o
- ma wartość stałą.
Przyspieszenie kątowe urządzenia PRBO
Przyspieszenie kątowe
ε urządzenia PBRO obliczamy na podstawie pomiaru czasu przebycia znanej
drogi przez ciężarek obciążający nić.
2
at
s
2
=
;
(prędkość początkowa wynosi 0)
1
r
a
ε
=
(4)
Gdzie: s, a - droga i przyspieszenie ciężarka obciążającego nić.
Stąd:
2
1
t
r
s
2
=
ε
(5)
Podstawiając wyrażenia (3), i (5) do równania (1) otrzymujemy po prostych przekształceniach:
+
+
=
m
r
I
1
g
s
2
d
mg
r
sm
t
2
1
o
2
2
1
w
2
(7)
W układzie współrzędnych prostokątnych, w którym na osi y odkładamy t
2
, a na osi x wartości d
2
,
równanie (7) jest równaniem prostej
B
Ax
y
+
=
(8)
Gdzie: stale A i B można wyrazić następująco:
mg
r
sm
A
2
1
w
=
(9)
+
=
m
r
I
1
g
s
2
B
2
1
o
(10)
Doświadczalnie potwierdzony prostoliniowy przebieg zależności t
2
= f(d
2
) jest dowodem słuszności
równania (1).
Część doświadczalna
W celu sprawdzenia słuszności równania dynamiki ruchu obrotowego dokonujemy pomiarów czasu t
opadania ciężarka m ze stałej wysokości s=1,5 m w zależności od odległości d przeciwległych walców
W. Zmieniając położenie ciężarków W zmieniamy moment bezwładności. Pomiary wykonujemy dla 4
wartości odległości d, w zakresie (8,5-20)·10
-2
m. Wyniki liczbowe zamieszczamy w tabeli. Dla każdej
wartości d, dokonujemy 6 pomiarów czasu opadania ciężarka t, biorąc do obliczeń wartość średnią.
Tabela 1
d [m]
t [sek.]
d
2
[m
2
] t
2
[sek
2
]
d
1
t
1,
…….. t
6
d
2
.
.
d
n
.
.
. .
Wykreślamy zależność t
2
(d
2
), która zgodnie z równaniem (7) powinna być zależnością prostoliniową,
opisywaną ogólnym równaniem prostej (8). Z wykresu t
2
(d
2
) dokonujemy oceny wartości stałych A i B.
Dokładne wartości współczynników A i B wyznaczamy korzystając ze statystycznej metody
opracowania wyników pomiarów (metoda najmniejszych kwadratów). Podstawy teoretyczne tej
metody wraz z konkretnym przykładem jej zastosowania zamieszczone są w instrukcji nr 17.
Wartości współczynników A i B wyznaczone z metody najmniejszych kwadratów porównujemy z
wartościami współczynników A i B wyznaczonymi na wykresie zależności t
2
(d
2
). W przypadku braku
zgodności sprawdzić obliczenia.
Opracowanie wyników
Sprawozdanie powinno zawierać:
1. Określenie celu ćwiczenia i podanie podstawowych zależności.
2. Sporządzić wykres zależności t
2
(d
2
) z wyników pomiarów zamieszczonych w Tabeli 1 (układ
SI).
2.1. Wykorzystując metodę najmniejszych kwadratów w odniesieniu do zależności t
2
(d
2
)
wyznaczamy wartości stałych A i B z równania (10). Z wartości stałej B obliczamy
moment bezwładności I
0
dla urządzenia PBRO;
2.2. Podać wartości momentu bezwładności I
o
urządzenia PBRO z uwzględnieniem błędu
bezwzględnego ∆I
o
(I
o
±∆I
o
) oraz obliczyć błąd względny
%
100
I
I
o
o
×
∆
3. Wnioski
końcowe.
Document Outline
Wyszukiwarka
Podobne podstrony:
Lab 02 2011 2012
Lab 02 R
Fizyka 14b, AGH, agh, programinski, Laborki, Laborki, Lab, FIZYKA - Laboratorium, fiz lab, franko
Fiz Lab 25
fiz lab
fiz lab grafik
E1A, fiz lab
pa lab [02] rozdział 2 UATQAIA4NCICPJGTM2Z7WZ67ZMYLLAS5WS6ALYA
fiz lab 452 wnioski
02 - pom rezystancji, Lab 02 c, Laboratorium
02 - pom rezystancji, Lab 02 c, Laboratorium
lab 02 php id 258739 Nieznany
2011 lab 02, Uklady rownan liniowych
więcej podobnych podstron