Politechnika Białostocka
Katedra Energoelektroniki i Napędu Elektrycznego
BADANIE PROSTOWNIKA REWERSYJNEGO Z BLOKADĄ PRĄDÓW
WYRÓWNAWCZYCH
Białystok 2009

2
Zastrzeżenia
Materiały zawarte w instrukcji przeznaczone są wyłącznie do użytku wewnętrznego
w KEiNE PB. Ich rozpowszechniane w jakiejkolwiek postaci na zewnątrz KEiNE PB stanowi
naruszenie praw własności oraz praw autorskich i jako takie jest karalne. Schematy i opra-
cowania zawarte w instrukcji przeznaczone są wyłącznie do celów edukacyjnych w KEiNE
PB. Wszelkie inne ich wykorzystanie wymaga zgody ich twórców. Żadna częśd jak i całośd
materiałów zawartych w instrukcji nie może byd powielana i rozpowszechniania lub dalej
rozpowszechniana w jakiejkolwiek formie i w jakikolwiek sposób (w tym także elektro-
niczny lub mechaniczny lub inny albo na wszelkich polach eksploatacji) włącznie z kopio-
waniem, szeroko pojętą cyfryzacją lub kopiowaniem, w tym także zamieszczaniem w In-
ternecie bez pisemnej zgody ich twórców.
Ogólne zasady bezpieczeństwa
Przed przystąpieniem do zajęć należy zapoznać się z instrukcją dydaktyczną do stano-
wiska laboratoryjnego.
Dokonać oględzin urządzeń i przyrządów używanych w ćwiczeniu, a o zauważonych
nieprawidłowościach bezzwłocznie powiadomić prowadzącego.
Zabrania się samodzielnego załączania stanowiska bez zgody prowadzącego.
Zmian nastaw parametrów lub konfiguracji, możliwych przy użyciu dostępnych manipula-
torów (potencjometrów, przełączników), należy dokonywać po przeanalizowaniu skut-
ków takich działań.
Zmian konfiguracji obwodów elektrycznych, możliwych jedynie poprzez zmiany połączeń
przewodów, należy dokonywać za zgodą prowadzącego po uprzednim wyłączeniu zasi-
lania stanowiska.
Po załączeniu stanowiska wykonywanie przełączeń (np. wymiana przyrządu) w układzie
znajdującym się pod napięciem jest niedozwolone.
W w/w stanowisku dostępne są części czynne obwodu elektrycznego o napięciu prze-
kraczającym napięcie bezpieczne, dlatego przed uruchomieniem należy zachować od-
powiednie oddalenie od tych części czynnych w celu uniknięcia porażenia prądem elek-
trycznym.
Stosowanie sposobów sterowania, ustawień lub procedur innych niż opisane w instrukcji
może spowodować nieprzewidziane zachowanie obiektu sterowanego a nawet uszko-
dzenie stanowiska.
Nie należy podłączać urządzeń nie przeznaczonych do współpracy z tym stanowiskiem
laboratoryjnym.
Przekroczenie dopuszczalnych parametrów prądów, napięć sygnałów sterujących może
doprowadzić do przegrzania się niektórych podzespołów, pożaru lub porażenia prądem.
W przypad
ku pojawienia się symptomów nieprawidłowego działania (np. swąd spaleni-
zny) natychmiast należy wyłączyć stanowisko i odłączyć przewód zasilający.
Demontaż osłon stanowiska oraz wszelkie naprawy i czynności serwisowe, oprócz opi-
sanych w instrukcji, powinny
być wykonywane przez wykwalifikowany personel po wyłą-
czeniu stanowiska.
Należy stosować tylko bezpieczniki o parametrach nominalnych podanych w instrukcji
lub na obudowie urządzenia.
Urządzenie powinno być czyszczone przy użyciu suchej i miękkiej szmatki. Nie należy
stosować do tych celów rozpuszczalników.

3
Podczas korzystania z aparatury laboratoryjnej (oscyloskopy, generatory, zasilacze itp.)
należy przestrzegać ogólnych zasad bezpieczeństwa tj.:
-
Do zasilania przyrządu należy stosować tylko kable zalecane do danego wyrobu.
- Nie należy podłączać lub odłączać sond i przewodów pomiarowych, gdy są one dołą-
czone do źródła napięcia.
- Przyrząd powinien być połączony z uziemieniem przez przewód ochronny w kablu za-
si
lającym. Aby uniknąć porażenia przewód ten powinien być podłączony do przewodu
ochronnego sieci.
- Przewód uziemiający sondy należy podłączać tylko do uziemienia ochronnego. Nie na-
leży podłączać go do punktów o wyższym potencjale.
- Aby uniknąć porażenia prądem podczas używania sondy, należy trzymać palce nad
pierścieniem zabezpieczającym. Nie wolno dotykać metalowych części grotu, gdy son-
da jest podłączona do źródła napięcia
Nie dotykać końcówek przewodów łączeniowych w trakcie wykonywania pomiarów.
Uwagi szczególne odnośnie pracy przy stanowisku
Sta
nowisko laboratoryjne zasilane jest z zasilacza o zakresie napięć bezpiecznych.
Nie stwarza więc bezpośredniego zagrożenia zdrowia lub życia osób je obsługujących.
Pomimo to, uruchomienie układu może być dokonane tylko i wyłącznie na wyraźne pole-
cenie prow
adzącego zajęcia.
Niedopuszczalne jest wykonywanie czynności łączeniowych przy załączonym którymkol-
wiek z elementów stanowiska laboratoryjnego. Mimo, że wszystkie napięcia na łączach
mają wartości niższe od 24V, to w wyniku przełączeń „pod napięciem” może nastąpić
uszkodzenie podzespołów stanowiska.
Podczas pomiarów oscyloskopem wielokanałowym należy zwrócić uwagę na
właściwe przyłączenie masy sond oscyloskopowych by nie spowodować zwarcia w
badanych układach.
Niedopuszczalne jest kasowanie, kopiowanie lub wprowadzanie własnych programów
komputerowych nie związanych bezpośrednio z wykonywanym ćwiczeniem, bez zgody
prowadzącego zajęcia. Zakończenie ćwiczenia należy zgłosić prowadzącemu ćwiczenia.
Po sprawdzeniu przez prowadzącego należy dokonać czynności porządkowych na
stanowisku laboratoryjnym,
a uszkodzone w trakcie ćwiczenia przewody - naprawić
4
1. Podstawy teoretyczne
1.1 Prostowniki rewersyjne
Prostownik sterowany generuje napięcie wyjściowe, którego wartość średnia
w przypadku ciągłego prądu odbiornika może być wyznaczona z następującej zależno-
ści :
cos
U
q
sin
q
U
M
O
(1)
gdzie :
- kąt opóźnienia wysterowania,
(0,
),
q - liczba pulsów napięcia wyjściowego w okresie napięcia wejściowego,
U
M
- wartość maksymalna napięcia, z którego kształtowane jest napięcie wyj-
ściowe prostownika (jest nim napięcie fazowe w przypadku prostownika
trójpulsowego i napięcie międzyfazowe w przypadku prostownika trójfa-
zowego mostkowego).
W pełnym zakresie kątów wysterowania wartość średnia napięcia wyjściowego
zmienia się w zakresie od +U
OM
do -U
OM
, gdzie:
M
OM
U
q
sin
q
U
.
(2)
Prąd wyjściowy prostownika może być tylko jednokierunkowy, gdyż tyrystory
mogą przewodzić prąd w jednym kierunku. Istnieją odbiorniki, które wymagają zasi-
lania nie tylko dwukierunkowym napięciem, ale też wymagają dwukierunkowego
przepływu prądu zasilającego. Przykładem takiego odbiornika mogą być maszyny
prądu stałego. Gdy wirnik maszyny wiruje w określonym kierunku, to w celu jego za-
hamowania należy przejść od pracy silnikowej do prądnicowej. Przy stałym wzbudze-
niu oznacza to zmianę kierunku przepływu prądu twornika. Zasilacz takiego silnika
powinien umożliwiać praktycznie bezprzerwową zmianę kierunku przepływu energii.
Można go zbudować przez przeciwsobne połączenie dwóch prostowników A i B, dzię-
ki czemu możliwe jest uzyskanie obu polaryzacji wielkości wyjściowych ( +U
O
i
+I
O
). Taki przekształtnik jest czterokwadrantowym źródłem napięcia. Typowym jego
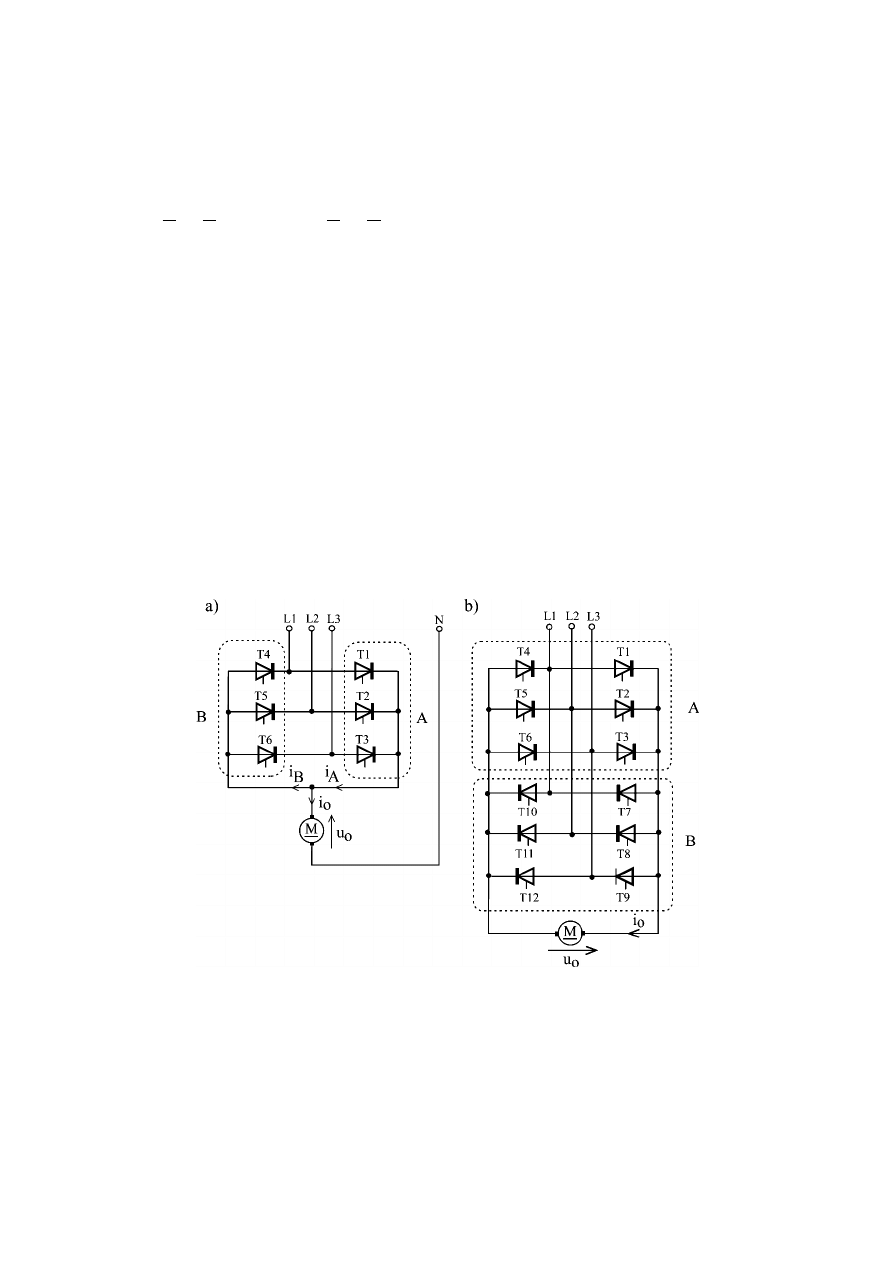
zastosowaniem jest napęd nawrotny prądu stałego. Uproszczony schemat ideowy pro-
stownika rewersyjnego w wersji trój- i sześciopulsowej pokazano na rysunku. 1. Prze-
kształtniki pojedyncze wchodzące w skład przekształtnika rewersyjnego mogą być
sterowane symetrycznie, dzięki czemu wartości średnie napięcia generowanego ( jeśli
pominięte zostaną niewielkie spadki napięcia na tyrystorach ) przez oba przekształtniki
składowe A i B powinny być sobie równe. Możliwe to jest w sytuacji, gdy jednocze-
śnie jeden przekształtnik np. A wysterowany jest do pracy prostownikowej a drugi, np.
B - do pracy falownikowej. Przebiegi czasowe napięć wyjściowych przekształtników
składowych przekształtnika rewersyjnego pokazano na rysunku 2. Ponieważ punkty
komutacji naturalnej prostownika A leżą w punktach M, a prostownika B w punktach
N, to przy takich samych kątach wysterowania liczonych od punktów komutacji natu-
5
ralnej prostowniki generują napięcia o przeciwnych znakach. Spełnienie warunku
równości wartości średnich napięć wyjściowych obu przekształtników wymaga speł-
nienia następującej zależności:
B
M
A
M
cos
U
q
sin
q
cos
U
q
sin
q
(3)
B
A
cos
cos
(4)
stąd:
B
A
B
A
cos
cos
(5)
W celu uzyskania zwartości zapisu zamiast kąta opóźnienia wysterowania
wprowa-
dza się kąt wyprzedzenia wysterowania
i wówczas warunek sterowania sy-
metrycznego wyraża się zależnością:
A
B
(6)
Z powyższej równości wnika, że kąt opóźnienia wysterowania przekształtnika A -
A
i
kąt wyprzedzenia wysterowania przekształtnika B -
B
są jednakowe.
Rys. 1. Uproszczony schemat ideowy prostowników rewersyjnych z blokadą prądów wyrów-
nawczych w wersji trójpulsowej (a) i sześciopulsowej (b)
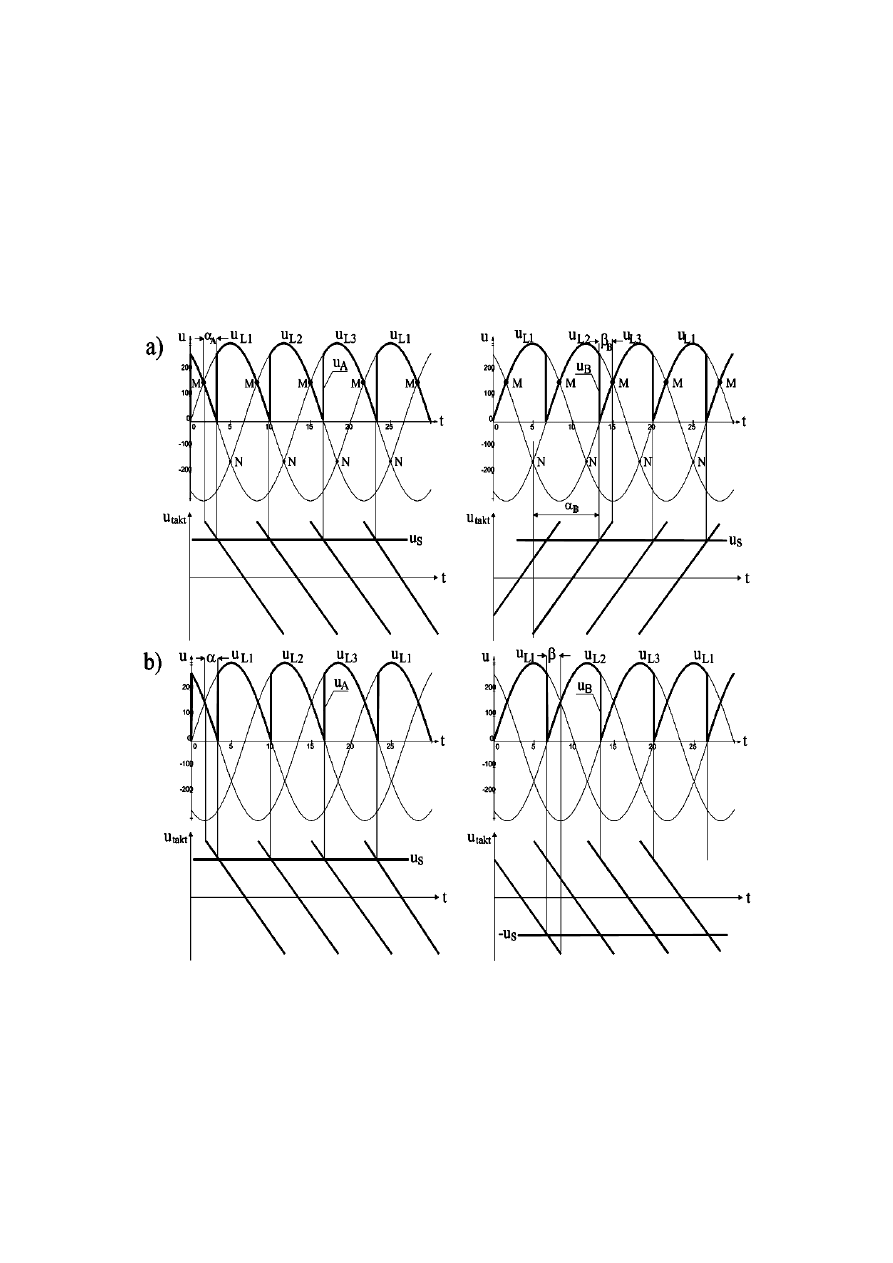
Na rysunku 2. pokazano przebiegi czasowe napięć generowanych przez oba
prostowniki składowe. W celu utrzymania równości wartości średnich napięć wyj-
ściowych prostowników składowych przekształtnik A jest sterowany jest z kątem
opóźnienia wysterowania
A
, natomiast przekształtnik B -
B
. Oba kąty muszą mieć
6
jednakowe wartości, a sposób ich określania, przy liniowym napięciu taktującym, po-
kazano na rysunku 2a. Taki sposób sterowania prostownika wymaga dwóch odmien-
nych typów sterowników, gdyż w sterowniku prostownika A napięcie taktujące jest
malejące, a w sterowniku prostownika B napięcie taktujące jest narastające. Istnieje
możliwość stosowania jednego typu sterownika (np. z liniowym napięciem maleją-
cym) do sterowania prostownika rewersyjnego, ale wymaga podania na wejście ste-
rownika prostownika B napięcia sterującego o odwrotnej polaryzacji w stosunku do
napięcia sterującego prostownika A. Taki sposób kształtowania napięcia prostowników
składowych ilustruje rysunku 2b.
Rys. 2. Przebiegi czasowe napięć wyjściowych przekształtników składowych trójpulsowego
przekształtnika rewersyjnego w przypadku stertowania symetrycznego
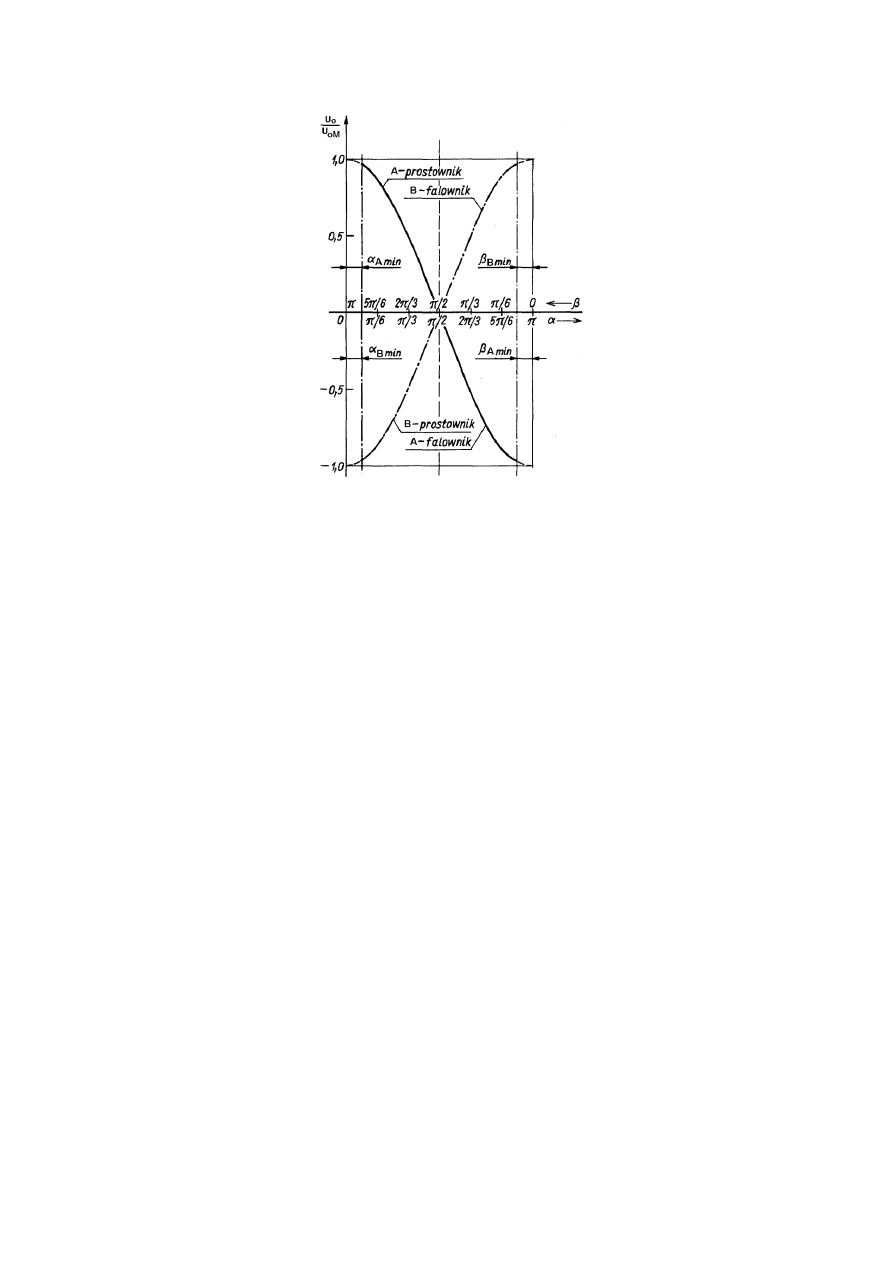
Statyczne charakterystyki sterowania przekształtnika rewersyjnego (U
o
=f(
))
sterowanego symetrycznie (sterowniki z liniowym napięciem taktującym, przewodze-
nie ciągłe) przedstawiono na rysunku 3
.
7
Rys. 3. Charakterystyki sterowania przekształtnika rewersyjnego.
Bliższa analiza kształtu napięć wyjściowych prostownika rewersyjnego pokaza-
nych na rysunku 2 wskazuje, że wprawdzie wartości średnie napięć prostowników
składowych są jednakowe, to wartości chwilowe mogą różnić się znacznie. Bezpo-
średnie połączenie zacisków wyjściowych prostowników spowodowałoby przepływ
znacznych prądów wyrównawczych prowadzących do zwarcia (zwarcie międzyfazo-
we poprzez wysterowane zawory obu grup prostownikowych). Ograniczenie prądów,
które mogłyby płynąć pomiędzy fazami źródła zasilającego z pominięciem obciążenia,
zwanych prądami wyrównawczymi można zrealizować dwoma sposobami. Pierwszy
polega na zastosowaniu są specjalnych dławików. Ten sposób nie będzie w tym ćwi-
czeniu realizowany, dlatego nie będzie dalej omawiany.
Drugi sposób ograniczenia prądów wyrównawczych polega na zastosowaniu zasa-
dy sterowania rozdzielnego poszczególnych prostowników składowych, określanej
mianem sterowania bez prądów wyrównawczych lub sterowaniem z blokadą prądów
wyrównawczych. Strategia sterowania przekształtnika z blokadą polega na tym, że gdy
przewodzą tyrystory prostownika A, to tyrystory prostownika B są w stanie blokowa-
nia (nie mogą być wysterowane) i odwrotnie. Przełączanie przewodzenia z jednego
prostownika na drugi odbywa się w stanie bezprądowym. Oznacza to, że zmiany kąta
wysterowania prostownika przewodzącego odbywają się tak, aby prąd zmalał do zera.
Po odzyskaniu przez tyrystory właściwości zaporowych (konieczna zwłoka czasowa
t
Z
) można odblokować drugi prostownik. Umożliwi to przepływ prądu odbiornika w
przeciwnym kierunku.
Jednym z częstszych zastosowań prostownika rewersyjnego jest dwukierunko-
wy napęd prądu stałego. W tej aplikacji różnica pomiędzy napięciem wyjściowym
prostownika, a siłą elektromotoryczną silnika jest niewielka, co może być przyczyną
znacznych skoków prądu nawet przy niewielkich zmianach napięcia sterującego u
S
(kąta wysterowania
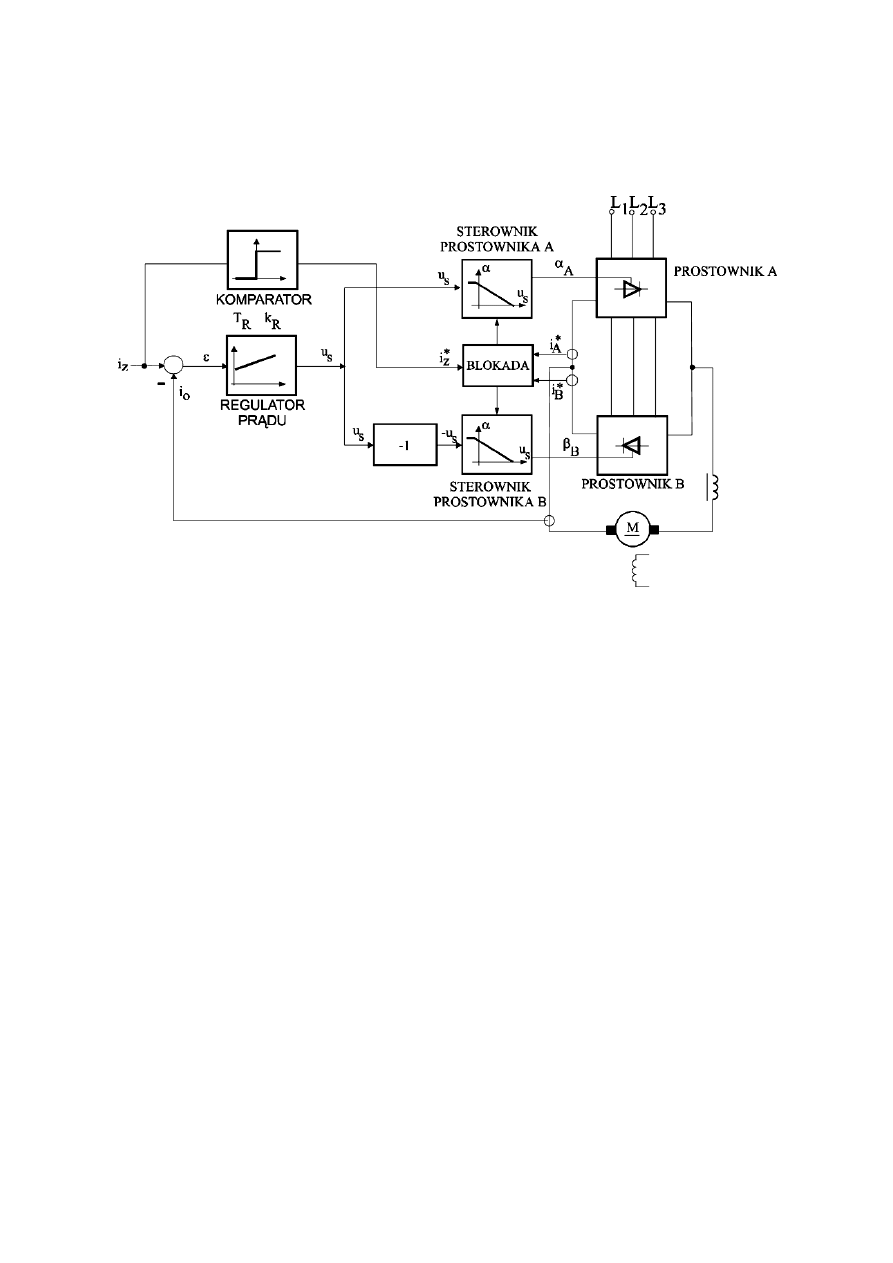
). Korzystnie jest więc prostownik rewersyjny objąć pętlą ujem-
nego, prądowego sprzężenia zwrotnego w sposób przedstawiony na rysunku 4.
8
W prezentowanym układzie regulator prądu tak zmienia napięcie sterujące układy wy-
zwalające tyrystorów u
S
, ażeby prąd odbiornika i
O
możliwie najmniej różnił się od
prądu zadanego i
Z
.
Rys. 4. Schemat blokowy zamkniętego układu regulacji prostownika rewersyjnego z blokadą
prądów wyrównawczych
Zasada działania prostownika rewersyjnego z blokadą polega na blokowaniu grupy
zaworowej, która w danej chwili nie bierze udziału w przewodzeniu prądu odbiornika,
przez odcięcie impulsów wyzwalających tyrystory. Informacja o konieczności zablo-
kowania lub odblokowania danej grupy zaworowej generowana jest w specjalnym
układzie logicznym zwanym blokadą. Blokada musi spełniać następujące funkcje:
gdy jeden z dwóch układów zaworowych przewodzi prąd, wówczas drugi (prze-
ciwny) nie może być wysterowany,
przy zmianie znaku sygnału wielkości zadanej, powinno następować przełączanie
obwodu przewodzenia z jednego układu prostownikowego na drugi,
zablokowanie impulsów wyzwalających tyrystory falownika nie może nastąpić
zanim prąd odbiornika nie zmaleje do zera.
W praktyce spotykamy kilka sposobów realizacji układu blokady różniących się
rodzajem sygnałów wejściowych:
blokada reagująca na obecność prądu obu grup zaworowych i znak prądu zadanego
b=f(i
A
*
, i
B
*
, i
Z
*
),
blokada reagująca na obecność prądu obciążenia oraz korelację pomiędzy znakiem
prądu zadającego, a aktualnym stanem blokady b(t+1) = f(i
0
*
, i
Z
*
, b(t)),
blokada reagująca tylko na obecność prądu w obu grupach prostownikowych
b(t)=f(i
A
*
, i
B
*
, t
Z
).
9
W opisie działania różnych typów blokad przyjęto następujące oznaczenia:
b=1 - oznacza stan blokowania danej grupy zaworowej,
b=0 - oznacza stan wysterowania danej grupy zaworowej,
i
Z
*
=1 - zadany zwrot prądu i
Z
odpowiadający przewodzeniu prostownika A,
i
Z
*
=0 - zadany zwrot prądu i
Z
odpowiadający przewodzeniu prostownika B,
i
O
*
=1 - płynie prąd obciążenia,
i
O
*
=0 - nie płynie prąd obciążenia,
i
A
*
=1 - prąd obciążenia płynie przez prostownik A,
i
B
*
=1 - prąd obciążenia płynie przez prostownik B.
Pierwsza blokada jest układem kombinacyjnym, którego sygnałami wejścio-
wymi są : kierunek prądu zadanego i
Z
*
i informacja o tym, która grupa zaworowa aktu-
alnie przewodzi prąd. Jeżeli płynie prąd w grupie A, to blokowana jest grupa B i od-
wrotnie. W przypadku, gdy w obu grupach prąd nie płynie (start układu lub stan prze-
wodzenia nieciągłego) blokada zmienia swój stan na taki, który odpowiada kierunkowi
prądu zadanego i
Z
*
. Trzy wejściowe sygnały binarne mogą wytworzyć osiem możli-
wych stanów wejść, którym przyporządkowano stany wyjść według wcześniej poda-
nych zasad, zgodnie z tablicą 1.
Tablica 1.
i
Z
*
i
A
*
i
B
*
b
A
b
B
1
0
0
0
1
1
0
1
1
0
1
1
0
0
1
1
1
1
0
0
0
1
0
0
0
1
1
0
0
1
0
0
1
0
1
1
Stan i
A
*
= i
B
*
= 1 oznacza zwarcie (przewodzą oba prostowniki składowe jednocześnie).
W czasie normalnej pracy stan ten nigdy nie może wystąpić.
Nie można odblokować impulsów wyzwalających tyrystory danego prostowni-
ka, zanim nie zmniejszy się do zera prąd poprzedniej grupy, a tyrystory nie odzyskają
właściwości zaworowych. Praktyczne stwierdzenie tego jest bardzo trudne, gdyż wy-
maga bardzo czułego układu pomiarowego, odpornego na wszechobecne zakłócenia
generowane przez obwód siłowy. Pewność działania blokady można zwiększyć stosu-
jąc na wyjściu blokady układy opóźniające, które blokują impulsy sterujące tyrystory
natychmiast, a odblokowują dopiero po czasie t
Z
. Czas t
Z
jest nieco większy od czasu
trwania jednego pulsu prostownika. Ponieważ prąd bliski zeru jest tylko w czasie
przewodzenia impulsowego (w tym stanie pracy prostownika czas trwania impulsu
prądu jest krótszy od czasu jednego pulsu napięcia wyjściowego), dlatego załączenie
impulsów dopiero po czasie t
Z
gwarantuje pewność, że nawet wtedy, gdy czujniki nie
wykryły prądu w tyrystorach, prąd odbiornika w czasie t
Z
zmaleje do zera i nastąpi
przełączenie prostownika bez zwarcia.
10
Rys. 5. Schemat ideowy blokady i przebiegi napięć i prądów prostownika rewersyjnego z
blokadą reagującą na kierunek prądu zadanego i obecność prądów poszczególnych
grup zaworowych b=f(i
A
*
, i
B
*
, i
Z
*
)
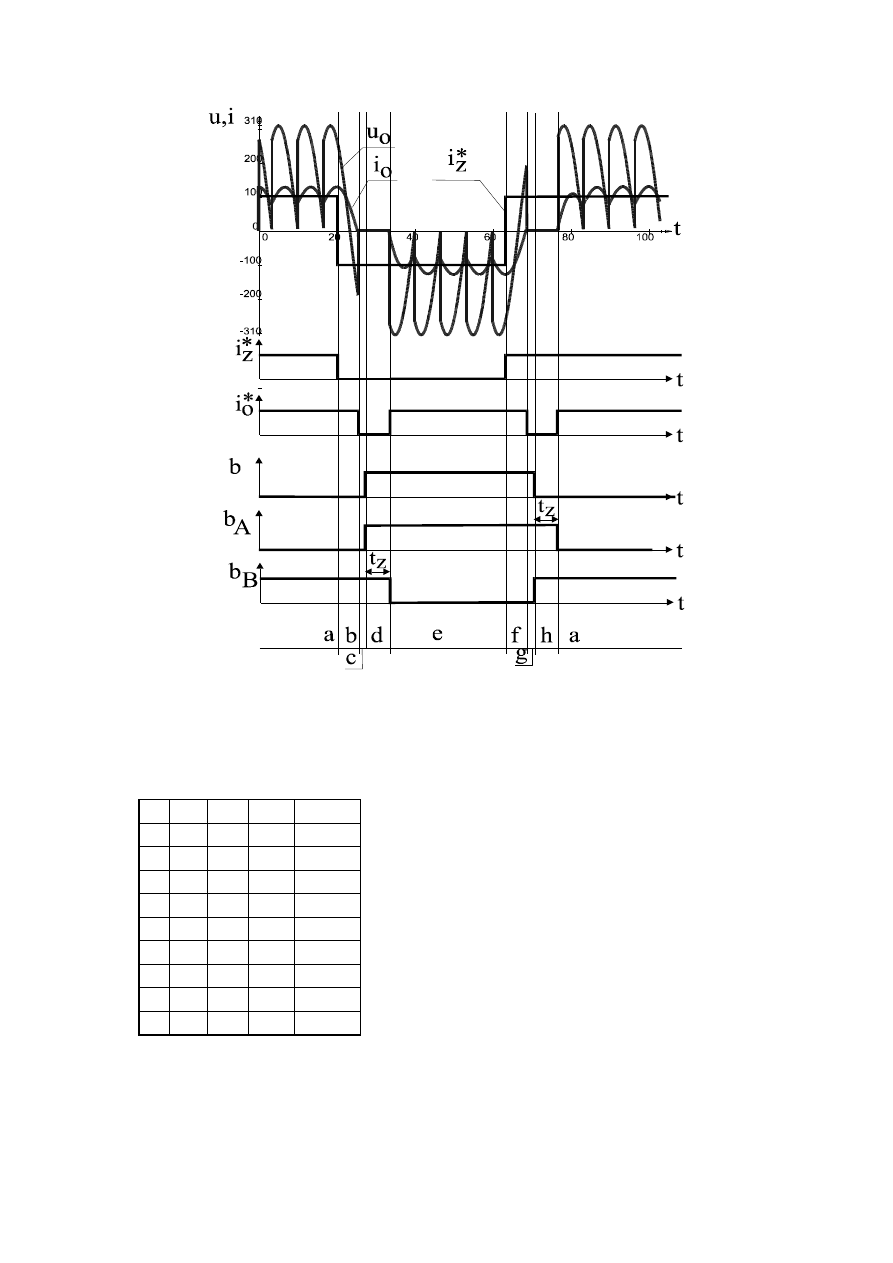
Kolejny typ blokady to blokada reagująca na obecność prądu obciążenia oraz
korelację pomiędzy znakiem prądu sterującego, a aktualnym stanem blokady
b(t+1) = f(i
0
*
, i
Z
*
, b(t)). Blokada nie zamienia stanu, gdy prąd obciążenia jest różny od
zera. Przy zerowym prądzie obciążenia blokada zmienia stan, jeżeli nie jest on wła-
ściwy do znaku aktualnego znaku prądu zadanego. Ten typ blokady, w przeciwień-
stwie do poprzedniego musi zawierać element pamięci i wymaga pomiaru tylko jedne-
go prądu. Na rysunku 6 przestawiono przebiegi napięć i prądów ilustrujących zasadę
działania blokady, schemat ideowy i tablicę przejść.
11
Rys. 6a. Przebiegi napięć i prądów prostownika rewersyjnego z blokadą reagującą
obecność prądu obciążenia oraz korelację pomiędzy znakiem prądu zadające-
go i aktualnym stanem blokady b(t+1) = f(i
0
*
, i
Z
*
, b(t))
i
Z
*
i
O
*
b(t) b(t+1)
a 1
1
0
0
b 0
1
0
0
c 0
0
0
1
d 0
0
1
1
e 0
1
1
1
f
1
1
1
1
g 1
0
1
0
h 1
0
0
0
a 1
1
0
0
Rys. 6b. Tablica przejść blokady prostownika
rewersyjnego reagującej na obecność
prądu obciążenia oraz korelację pomię-
dzy
znakiem
prądu
zadającego
i aktualnym
stanem
blokady
b(t+1) = f(i
0
*
, i
Z
*
, b(t))
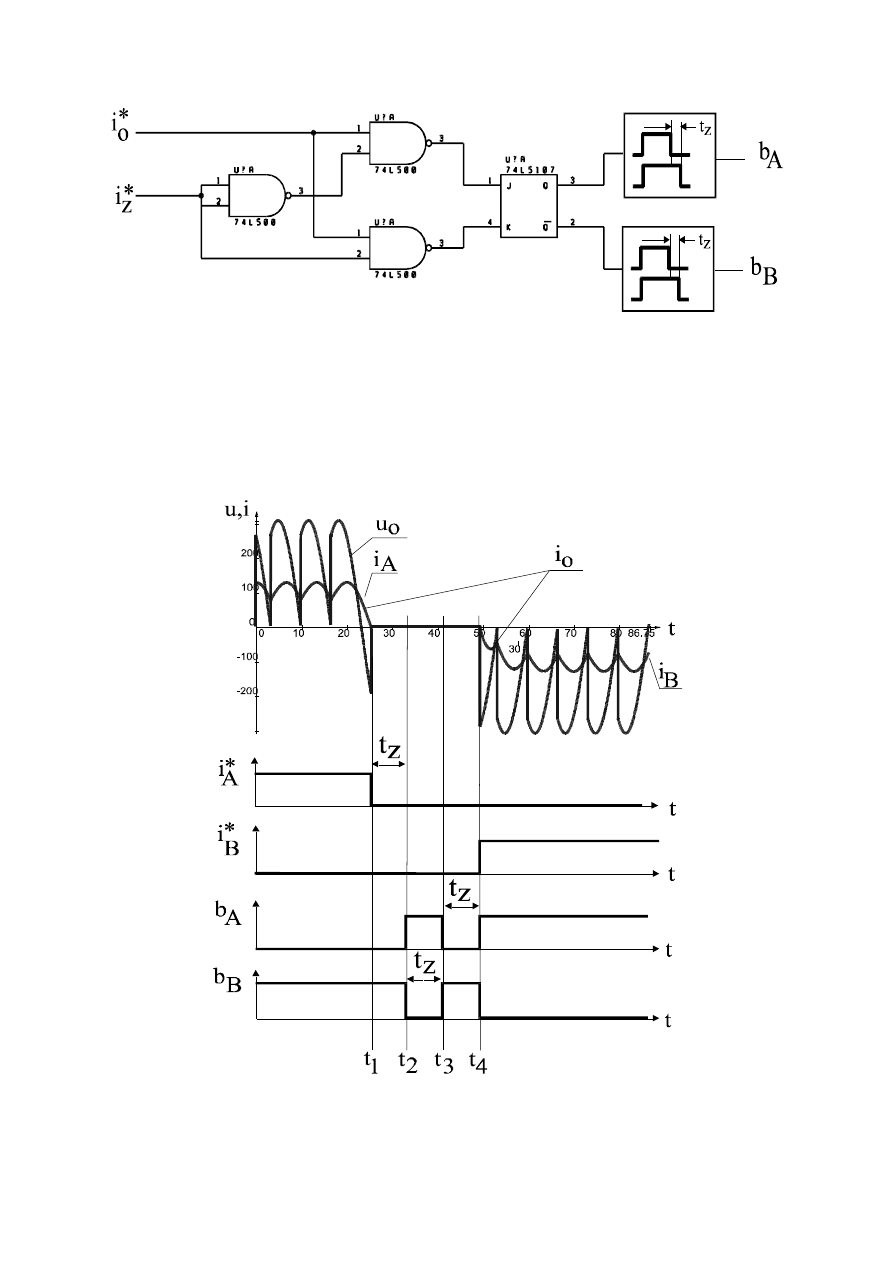
Rys. 6c. Schemat ideowy blokady prostownika rewersyjnego reagującej na obecność prądu
obciążenia oraz korelację pomiędzy znakiem prądu zadającego i aktualnym stanem
blokady b(t+1) = f(i
0
*
, i
Z
*
, b(t))
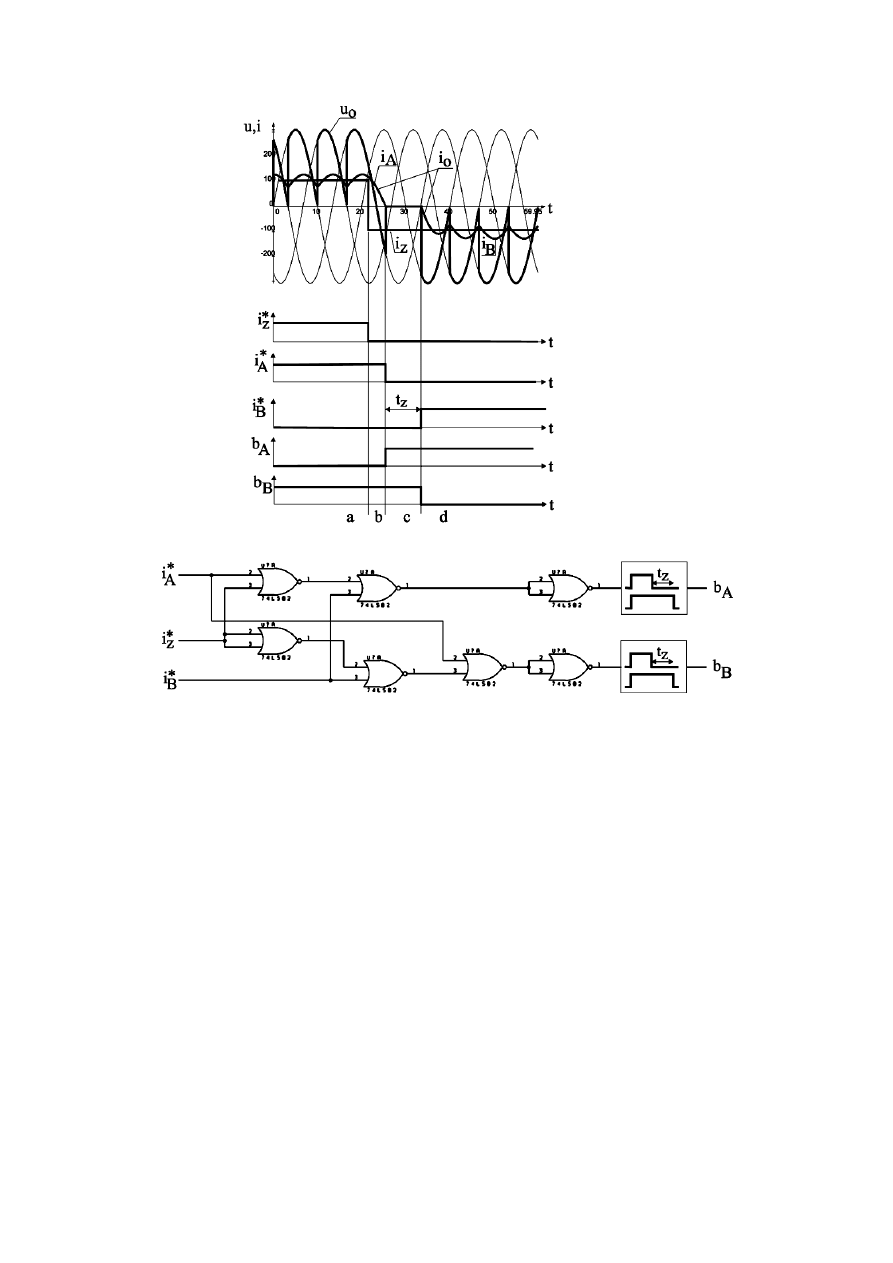
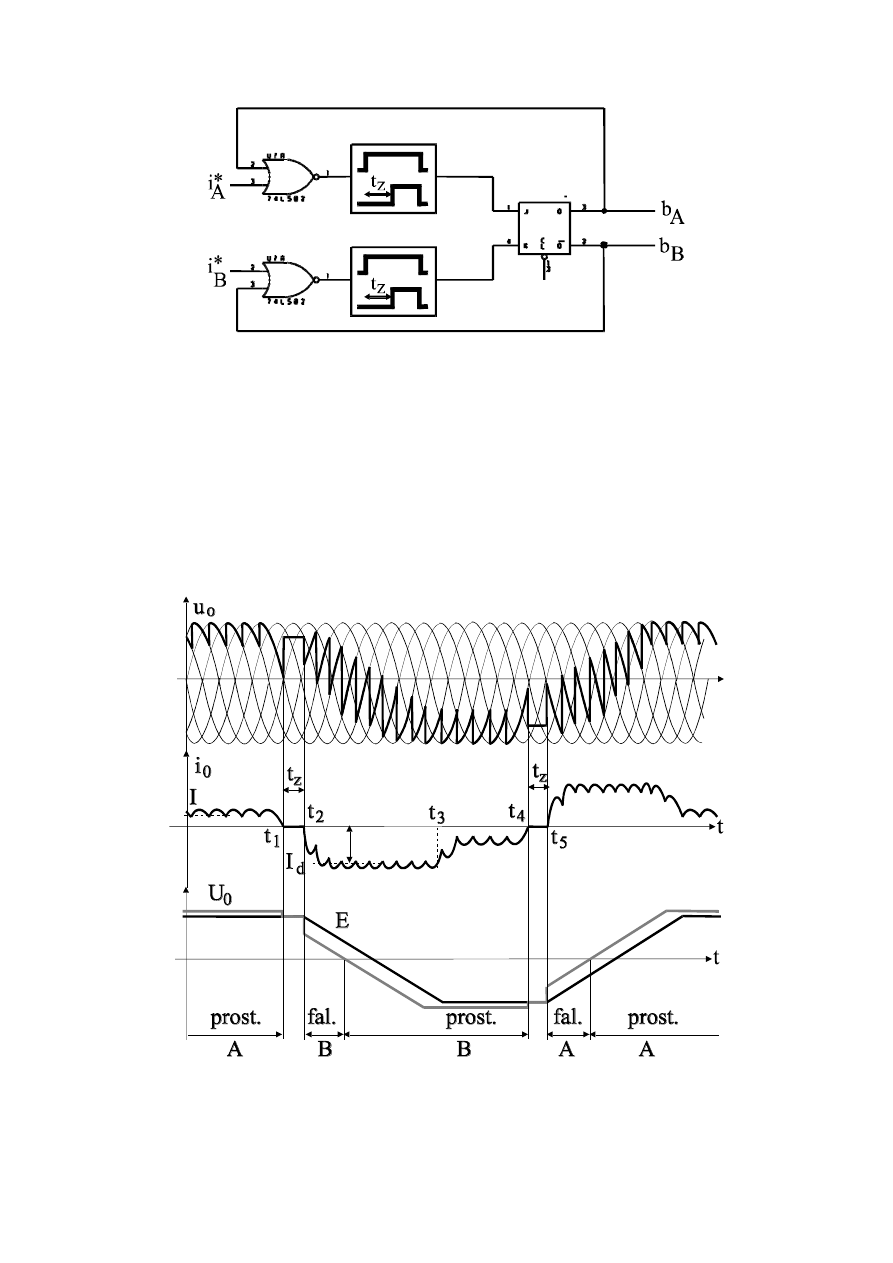
Trzeci typ blokady, tzw. „blokada szukająca”, reaguje tylko na obecność prądu w obu
grupach prostownikowych b(t)=f(i
A
*
, i
B
*
, t
Z
). Zasadę działania blokady pokazano na
rysunku 7.
Rys. 7a. Przebiegi napięć i prądów prostownika rewersyjnego z blokadą, która reaguje tylko
na obecność prądu w obu grupach prostownikowych b(t)=f(i
A
*
, i
B
*
, t
Z
)
13
Rys. 7b. Schemat ideowy blokady prostownika rewersyjnego reagującej tylko na obecność
prądu w obu grupach prostownikowych b(t)=f(i
A
*
, i
B
*
, t
Z
)
W stanie bezprądowym i
A
*
=i
B
*
= 0 blokada zmienia swój stan co czas t
Z
, umożliwiając
rozpoczęcie przewodzenia każdemu z prostowników składowych. Pracę rozpocznie
ten, który będzie miał spełnione są warunki przewodzenia w aktualnym punkcie pracy.
W celu łatwiejszego zobrazowania zasady działania blokady sztucznie wydłużono
czas, po którym zaczyna przewodzić kolejna grupa. Przebiegi napięć i prądów pro-
stownika rewersyjnego współpracującego z odbiornikiem R, L i E w układzie prak-
tycznym przedstawione są na rysunku 8.
Rys. 8. Przebiegi czasowe napięć i prądów prostownika rewersyjnego z odbiornikiem R, L i E
w czasie dynamicznego rewersu (siła elektromotoryczna odbiornika w czasie rewersu
zmienia się liniowo)
14
Są one analogiczne do przebiegów w poprzednich układach. Cechą charakterystyczną
tej blokady jest to, że do poprawnej pracy niezbędne są tylko informacje o tym czy
dana grupa zaworów przewodzi prąd. Dzięki temu można tę blokadę stosować w ukła-
dach z prostownikami rewersyjnymi pracującymi bez zamkniętej pętli prądowego
sprzężenia zwrotnego.
Zauważmy, że w przekształtnikach z blokadą prądów wyrównawczych zmiana
kierunku przepływu prądu odbiornika na przeciwny poprzedzana jest przerwą bezprą-
dową trwającą t
Z
. W czasie tej przerwy napięcie wyjściowe prostownika wynosi zero
(odbiornik typu R oraz R i L) lub E (odbiornik typu R, L i E). Są to cechy charaktery-
styczne pozwalające jednoznacznie odróżnić ten typ prostownika od innych.
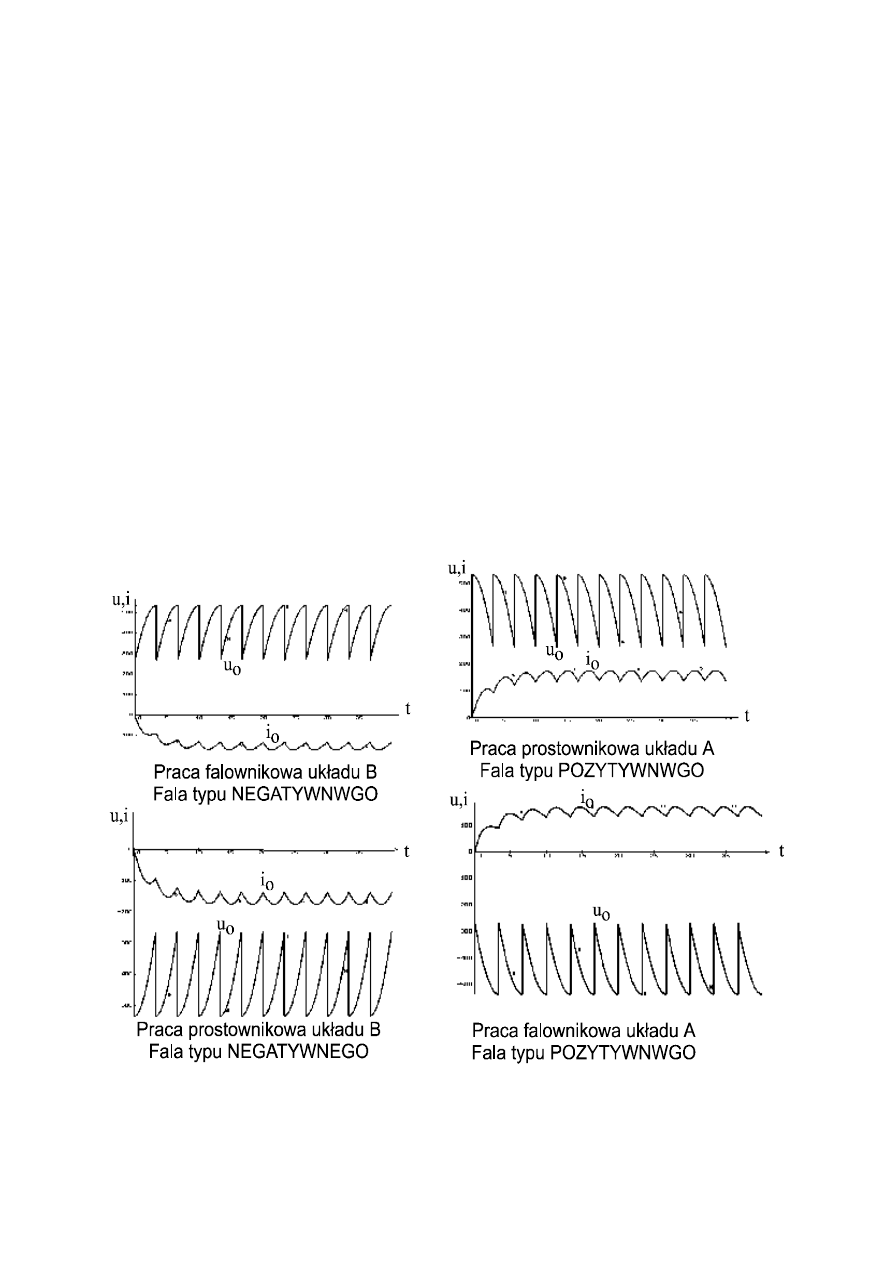
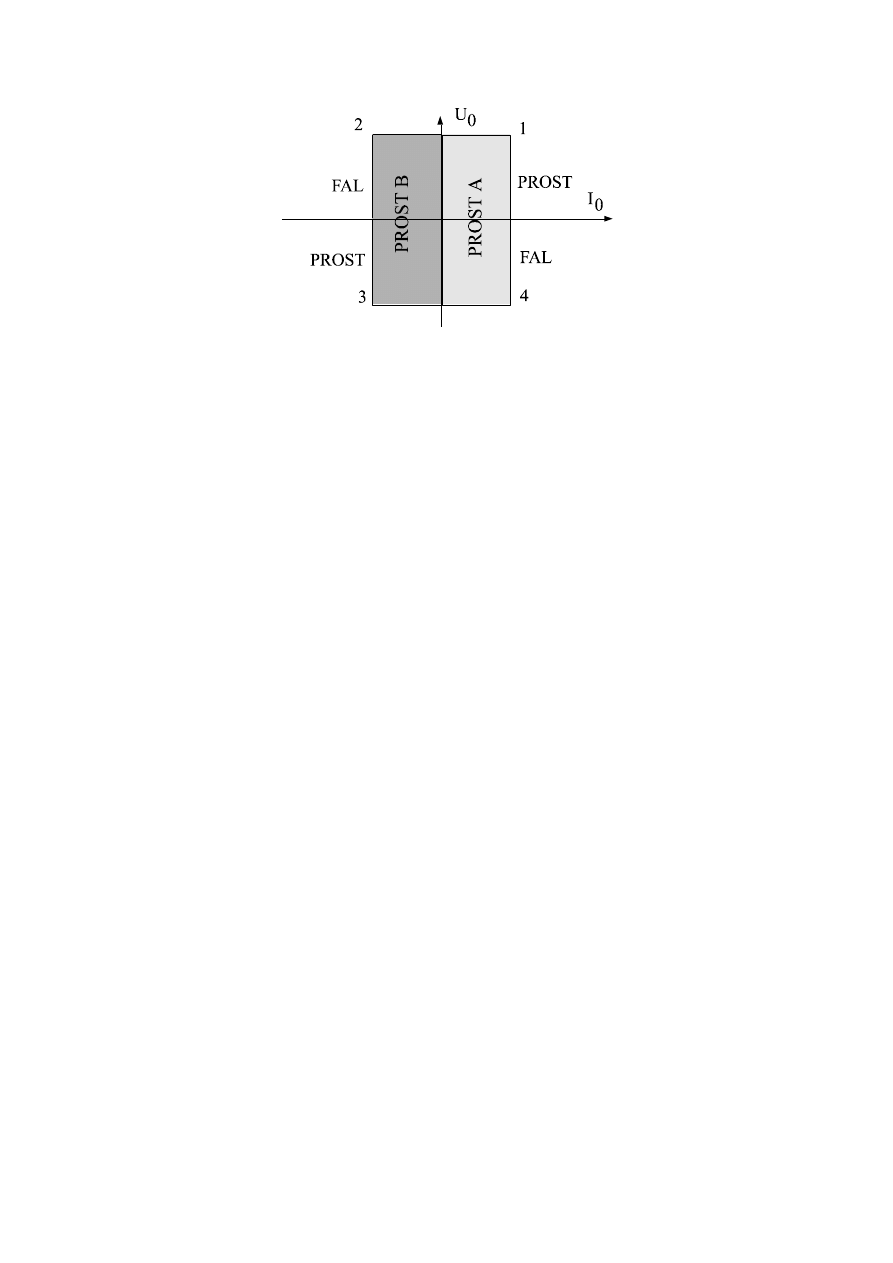
Na kolejnych rysunkach pokazano charakterystyczne kształty napięć w po-
szczególnych kwadrantach płaszczyzny U
O
-I
O
. Przekształtnik rewersyjny może gene-
rować dwa typy fal napięcia:
falę typu pozytywnego - napięcie wstępującego wycinka sinusoidy ma początkową
wartość chwilową większą niż końcowa wartość chwilowa napięcia wycinka ustę-
pującego
falę typu negatywnego - napięcie wstępującego wycinka sinusoidy ma początkową
wartość chwilową mniejszą niż końcowa wartość chwilowa napięcia wycinka ustę-
pującego
Rys. 9. Przebiegi wartości chwilowych napięcia i prądu wyjściowego prostownika w czterech
kwadrantach płaszczyzny U
O
-I
O.
15
Rys. 10. Wizualizacja poszczególnych stanów pracy prostownika rewersyjnego na płaszczyź-
nie U
O
-I
O
.

16
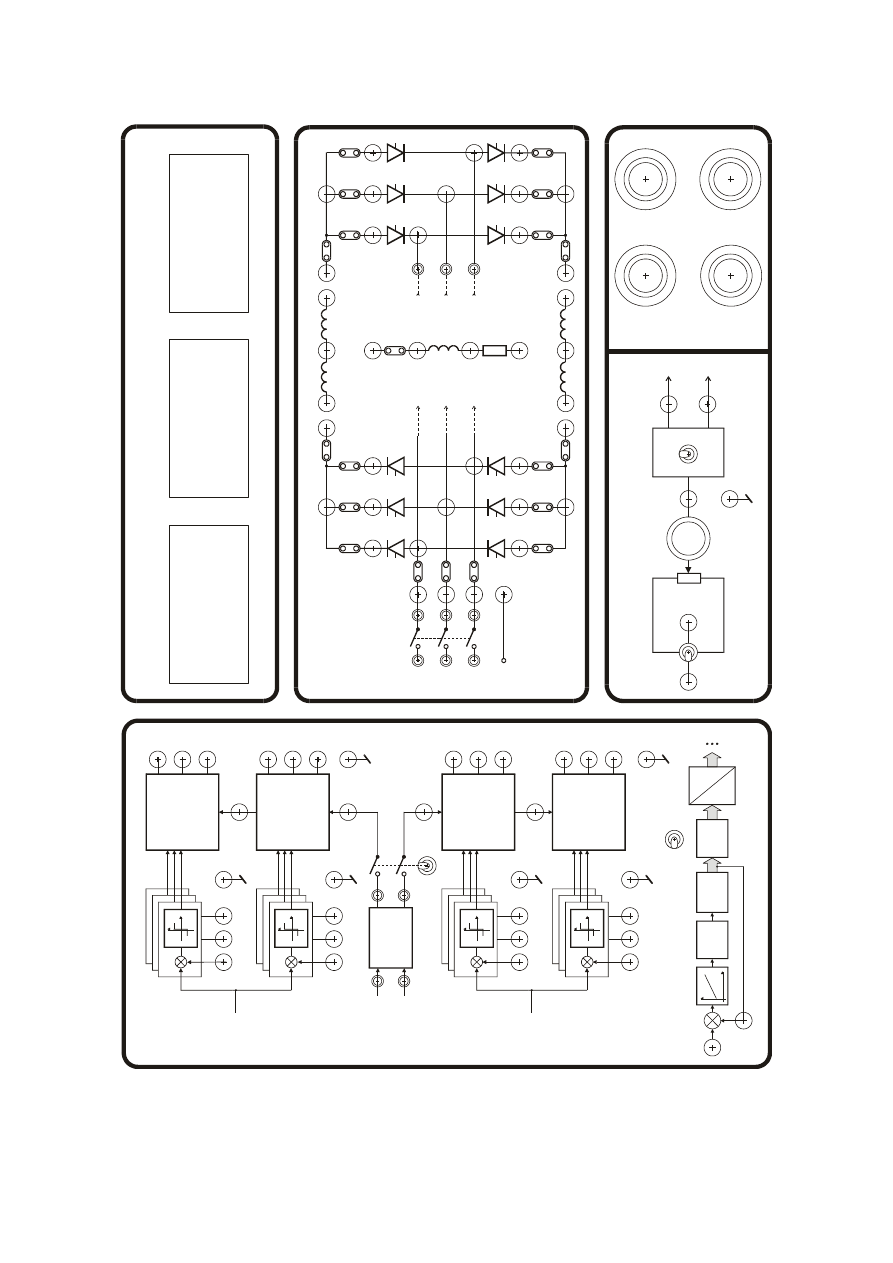
2. Opis stanowiska
Na rysunku 11 pokazano widok płyty czołowej stanowiska laboratoryjnego.
Po prawej stronie u dołu umieszczono główny przycisk załączający oznaczony jako Z.
Po naciśnięciu przycisku Z załącza się obwód sterowania i zostanie przygotowany do
uruchomienia obwód główny, który można załączyć i wyłączyć odpowiednio przyci-
skami ZL i WL. Przycisk W służy do wyłączenia stanowiska laboratoryjnego po
uprzednim zmniejszeniu prądu wyjściowego do zera. Wyłącznie stanowiska przy nie-
zerowym prądzie wyjściowym prostownika może prowadzić do przepięć mogących
uszkodzić tyrystory. Po lewej stronie przycisków sterujących umieszczono pole zawie-
rające potencjometr P
Z
i dwa przełączniki. Potencjometr P
Z
przeznaczony jest do regu-
lacji napięcia sterującego układy wyzwalania tyrystorów. Przełącznikiem znajdującym
się po lewej stronie potencjometru P
Z
wybierane jest źródło napięcia sterującego. Mo-
że nim wewnętrzne źródło napięcia stałego sygnowane jako DC lub zewnętrzny gene-
rator, który należy dołączyć do gniazda oznaczonego jako EXT. Generator zewnętrzny
służy jedynie do badania zachowania prostownika rewersyjnego w stanach dynamicz-
nych. Przełącznikiem znajdującym się po prawej stronie potencjometru P
Z
należy wy-
brać sposób sterowania. W prostownikach z blokadą prądów wyrównawczych możli-
we jest to tylko sterowanie symetrycznie (przy zerowym napięciu sterującym kąt wy-
sterowania
=
/2). Sterowanie asymetrycznie (przy zerowym napięciu sterującym kąt
wysterowania
=
MAX
) jest używane jedynie przy badaniu prostowników z prądami
wyrównawczymi. Lewą część płyty czołowej zajmuje układ sterowania prostownika.
Jest to typowa struktura wielokanałowa (każdy tyrystor ma oddzielny układ wyzwala-
nia). Impulsy wyzwalające powstają w chwili zrównania odpowiednich napięć taktują-
cych związanych z poszczególnymi tyrystorami i napięcia sterującego. Pomiędzy ste-
rownikami tyrystorów umieszczono blokadę, która stanowi specjalny układ logiczny
służący do blokowania grupy zaworowej, która w danej chwili nie bierze udziału w
przewodzeniu prądu odbiornika, przez odcięcie impulsów wyzwalających tyrystory. W
prostowniku z blokadą prądów wyrównawczych obie grupy prostownikowe przewo-
dzą prąd obciążenia alternatywnie, więc blokadę należy załączyć wyłącznikiem
umieszczonym obok niej. W układzie sterowania przekształtnika zastosowano „bloka-
dę szukającą”, gdyż ten typ blokady wymaga tylko informacji o tym czy płynie prąd
obciążenia. Wszystkie inne typy blokad wymagają dodatkowo informacji o kierunku
prądu zadanego, a ten sygnał dostępny jest tylko w układach z przekształtnikiem obję-
tym sprzężeniem prądowym. Sprzężenie zwrotne znacznie utrudniłoby badanie prze-
kształtnika rewersyjnego w stanach statycznych. Stan blokady i stan prostownika ob-
razują diody świecące. Świecenie diody oznaczonej jako i
A
oznacza przepływ prądu
dodatniego, a diody oznaczonej jako i
B
-odpowiednio prądu ujemnego. Diody umiesz-
czone na wyjściu blokady sygnalizują stan odblokowania impulsów wyzwalających
tyrystory danej grupy. W czasie poprawnej pracy świecą diody umieszczone w jednym
rzędzie.
Pod sterownikami znajduje się synchroniczna pętla fazowa. Jej zadaniem jest wytwo-
rzenie liczby proporcjonalnej do fazy napięcia sieci. Liczba ta podawana jest na wej-
ście pamięci RAM, w której zapisane są w postaci binarnej napięcia taktujące po-
szczególnych tyrystorów (patrz rys.2). Rodzaj tego napięcia (liniowe czy kosinuso-
idalne) wybierany jest przełącznikiem umieszczonym powyżej RAM.
17
B
LO
K
A
D
A
K
R
T
R
D
F
i
A
i
B
T
4
T
1
S
L
T
5
T
2
T
6
T
3
L
o
U
o
U
st
r
I
o
L
w
L
w
L
w
L
w
L
1
’
L
2
’
L
3
’
N
Z
L
Z
W
L
W
R
o
P
z
M
S
B
V
C
O
R
A
M
A
S
Y
M
.
S
Y
M
.
C
A
L
ic
zn
ik
E
X
T
LI
N
D
C
C
O
S
T
1
0
T
11
T
1
2
T
7
T
8
T
9
P
R
O
S
T
O
W
N
IK
I S
T
E
R
O
W
A
N
E
T
4
T
5
R
o
zd
zi
e
la
cz
im
p
ul
só
w
T
6
U
13
U
13
U
31
U
31
U
21
U
21
U
12
U
12
U
32
U
32
U
23
U
23
T
1
T
2
R
o
zd
zi
e
la
cz
im
p
ul
só
w
T
3
U
st
rA
U
st
rA
U
32
T
1
0
T
11
R
o
zd
zi
e
la
cz
im
p
ul
só
w
T
1
2
U
12
T
7
T
8
R
o
zd
zi
e
la
cz
im
p
ul
só
w
T
9
U
st
rB
U
st
rB
U
st
r
U
S
Rys. 11. Widok płyty czołowej stanowiska
Synchroniczna pętla fazowa ma wyprowadzone dwa sygnały: u
s
i MSB. Natychmiast
po załączeniu oba te sygnały na ekranie oscyloskopu zsynchronizowanego z siecią,
18
mają być nieruchome względem siebie. Niespełnienie tego warunku powoduje niepo-
żądaną modulację kąta wysterowania, której efektem są znaczne zmiany prądu obcią-
żenia, mimo że napięcie sterujące jest stałe. Jest to stan awaryjny, który należy zgłosić
prowadzącemu zajęcia.
Omawiane dotychczas bloki stanowiska laboratoryjnego są wewnętrznie skoja-
rzone i nie wymagają jakichkolwiek połączeń, w przeciwieństwie do prostowników,
które są na centralnym polu, po prawej stronie płyty czołowej stanowiska. Umieszczo-
no tu cztery prostowniki trójpulsowe (układy generujące impulsy sterujące bramki ty-
rystorów są podłączone wewnętrznie), cztery dławiki wyrównawcze L
W
(są one nie-
zbędne w prostowniku z prądami wyrównawczymi, natomiast w prostowniku z bloka-
dą prądów wyrównawczych mogą być wyjątkowo użyte jako dodatkowy dławik wy-
gładzający) i odbiornik typu R, L (zwarcie rezystora tego odbiornika przy dużych na-
pięciach wyjściowych grozi awarią).
Tyrystory prostowników są wewnętrznie podłączone do układów wyzwalania i
zasilone są z transformatora poprzez stycznik SL. Załączenie stycznika SL sygnalizują
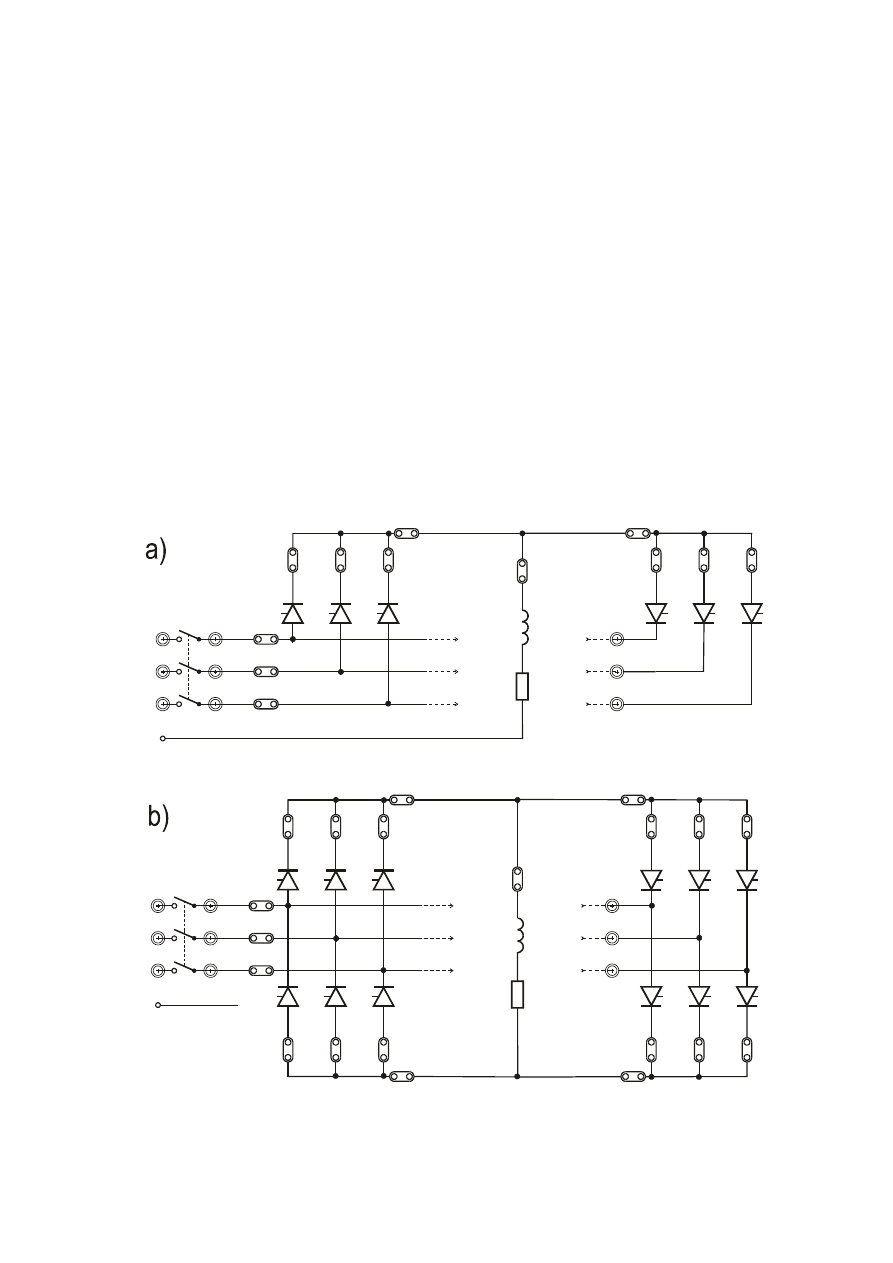
jest diody świecące. Wyjścia prostowników mogą być kojarzone tak, aby można
otrzymać prostowniki rewersyjne z blokadą prądów wyrównawczych, których sche-
maty pokazano na rys. 12.
T
4
T
1
SL
T
5
T
2
T
6
T
3
Lo
L1’
L2’
L3’
N
Ro
T
10
T
11
T
12
T
7
T
8
T
9
T
1
SL
T
2
T
3
L1’
L2’
L3’
N
Lo
Ro
T
7
T
8
T
9
Rys. 12. Schemat połączeń części siłowej prostownika rewersyjnego z blokadą prądów wy-
równawczych: a) układ trójpulsowy; b) układ sześciopulsowy.
19
Wewnętrzne rezystancyjno-indukcyjne obciążenie prostownika należy dołączać
do zacisków wyjściowych prostownika. Dzięki temu zostaną dołączone do prostowni-
ka mierniki umieszczone u góry, po prawej stronie płyty czołowej. Dwukierunkowe
mierniki oznaczone U
o
i I
o
wskazują wartość średnią napięcia i prądu wyjściowego
prostownika. Trzeci miernik, oznaczony jako U
STR
wskazuje wartość średnią napięcia
sterującego. Wskazania mierników są poprawne tylko przy stałym napięciu sterują-
cym. Wszystkie obserwacje przebiegów napięć i prądów mogą być dokonywane za
pomocą oscyloskopu. W celu dokonania rewersu dynamicznego należy podać na wej-
ście układów wyzwalających napięcie prostokątne przez przełączenie przełącznika
rodzaju napięcia sterującego w pozycję EXT (rysunek 11). W ten sposób zostanie
podane na wejście układu wyzwalającego napięcie z zewnętrznego generatora. Za jego
pomocą należy ustawić wartość maksymalną napięcia wyjściowego prostownika re-
wersyjnego i częstotliwość rewersów.
20
3. Program ćwiczenia
1. Połączyć według schematu przedstawionego na rysunku 12 układ trójpulsowego
przekształtnika rewersyjnego z blokadą prądów wyrównawczych.
2. Zarejestrować przebiegi napięcia i prądu wyjściowego prostownika z odbiorni-
kiem R, L dla prądu odbiornika ciągłego i impulsowego we wszystkich możli-
wych stanach pracy.
3. Zarejestrować i zinterpretować przebiegi prądów i napięć w czasie dynamiczne-
go rewersu napięcia sterującego.
4. Powtórzyć powyższe czynności po zmianie prostownika trójpulsowego na sze-
ściopulsowy.
5. Wyznaczyć charakterystyki sterowania obu układów Uo = f(Us) przy linowym i
kosinusoidalnym napięciu taktującym.
4. Pytania kontrolne.
1. Narysuj schemat prostownika rewersyjnego.
2. Narysuj przebiegi napięcia i prądu wyjściowego prostownika z odbiornikiem R,
L i E przy przewodzeniu ciągłym i impulsowym we wszystkich możliwych sta-
nach pracy prostownika z blokadą prądów wyrównawczych.
3. Przedstaw funkcje blokady.
4. Omów zasadę działania poszczególnych typów blokad.
5. Wyjaśnij dlaczego w przekształtnikach z blokadą prądów wyrównawczych nie-
zbędna jest przerwa bezprądowa
6. Przedstaw mechanizm powstawania napięcia wyrównawczego.
7. Narysuj przebieg napięcia i prądu wyjściowego prostownika rewersyjnego z
blokadą prądów wyrównawczych obciążonego odbiornikiem rezystancyj-
no-indukcyjnym w czasie skokowej zmiany wartości średniej napięcia wyj-
ściowego na przeciwną.
LITERATURA
1. R.Barlik, M.Nowak: Poradnik inżyniera energoelektronika . WNT 1998.
2. R.Barlik, M.Nowak: Technika tyrystorowa . WNT 1997.
3. T.Citko: Analiza układów energoelektroniki. Skrypt PB Białystok, 1992.
4. H.Tunia, R.Barlik :Teoria przekształtników. Wyd. Politechniki Warszawskiej
1992.
5. H.Tunia, B.Winiarski: Energoelektronika. WNT 1994.
6. H.Tunia, B.Winiarski: Podstawy energoelektroniki. WNT 1987.
Instrukcję opracował dr inż. Antoni Bogdan

21

22

23
20,1,2,19,18,3,4,17,16,5,6,15,14,7,8,13,12,9,10,11
Wyszukiwarka
Podobne podstrony:
Badanie prostownika 3pulsowego 97 (1)
Badanie prostowników
Badanie prostownika trojfazowego sterowanego
Badanie prostowników i powielaczy napi¬ć , Pracownia elektroniki. Semestr 4. Seria 2
Badanie prostownika jednopołówkowego, Mateusz Bartocha
Badanie prostowników i powielaczy napięcia 2, Politechnika Lubelska
Badanie prostowników i powielaczy napięć Pelc
Badanie prostownika, PROSTO~1wal, RADOM
Badanie prostownika, Prostowniki (GOTOWE) gerber, Rafał Kapusta Gr
spr badanie prostoliniowości 5.opr prostoliniowosc
SKRYPT, BADANIE PROSTOWNIKÓW TRÓJFAZOWYCH NIESTEROWANY
spr badanie prostoliniowości 7.opr prostoliniowosc
Badanie prostowników sprawozdanie
Badanie prostowników jedno i dwu połówkowego
4M Badanie prostownik w jednof Nieznany
Badanie prostownikówgtw
badanie prostowników druk
5M Badanie prostownik w sterow Nieznany
więcej podobnych podstron