1. RODZAJE BEZPIECZEŃSTWA TRANSPORTU SAMOCHODOWEGO
Bezpieczeństwo transportu drogowego
Bezpieczeństwo
środków transportu
Bezpieczeństwo
uczestników ruchu
drogowego
Bezpieczeństwo ruchu
drogowego
Bezpieczeństwo
przewożonych
ładunków
1. Czynne
2. Bierne
3. Powypadkowe
4. Ekologiczne
5. Konstrukcyjne
1. Kierowca
2. Pasażer
3. Pieszy
4. Inni
1. Droga
2. Ruch drogowy
(jego organizacja)
Bezpieczeństwo czynne (aktywne) – zespół cech pojazdu umożliwiających kierującemu pojazdem zmniejszenie lub
wyeliminowanie ryzyka powstania kolizji drogowej. Istotną cechą bezpieczeństwa czynnego jest to, że dotyczy
urządzeń i systemów (uruchamianych przez kierowcę lub jego postępowanie, jaki i działające samoczynnie), które
pozwalają podejmować działania obronne przed zaistnieniem kolizji drogowej.
Bezpieczeństwo bierne (pasywne) samochodu – ma na celu zmniejszenie skutków zaistniałej już kolizji drogowej.
Dotyczy to okresu, w którym kierowca niezależnie od zastosowanych środków bezpieczeństwa, nie jest już w stanie
wpłynąć na charakter ruchu samochodu i zapobiec powstaniu kolizji drogowej.
Bezpieczeństwo powypadkowe – zdolność do zmniejszenia skutków kolizji drogowej po zatrzymaniu się samochodu
przez: możliwość szybkiej likwidacji skutków kolizji; zapobieganie powstawaniu nowych sytuacji kolizyjnych
(zagrożeń).
Bezpieczeństwo ekologiczne – polega na zmniejszeniu szkodliwego oddziaływania eksploatowanego samochodu na
uczestników ruchu drogowego i środowisko naturalne (biologiczne elementy otoczenia).
Bezpieczeństwo konstrukcyjne – to cecha polegająca na zachowaniu sprawności zespołów zapewniających
bezpieczeństwo: na pożądanym poziomie podczas całego okresu eksploatacji samochodu; w dowolnych warunkach
atmosferycznych; w każdej sytuacji drogowej.
2. OMÓWIĆ PRZYCZYNY I SKUTKI KOLIZJI I WYPADKÓW DROGOWYCH
Rekonstrukcja polega na zebraniu informacji i wszystkich śladów o wszystkich skutkach aby na tej podstawie
wskazać relatywne przyczyny wypadku.
Do przyczyn zalicza się wszystkie zdarzenia mające miejsce przed powstaniem kolizji:
Stan techniczny samochodu
Prędkość samochodu przed rozpoczęciem hamowania (lub innych manewrów obronnych)
Rodzaj i stan nawierzchni
Warunki atmosferyczne
Możliwości działań kierowcy (umiejętność, stan fizyczny i psychiczny)
Inne
Do skutków zalicza się wszystkie zdarzenia, które wystąpiły po powstaniu kolizji:
Stopień obrażeń kierowcy i pasażerów samochodu
Stopień obrażeń pieszych uczestniczących w wypadku
Zakres uszkodzeń samochodu
Inne (skasowanie znaku, barier itp.)
FAZY WYPADKU
I.
Faza początkowe – powstaje taka sytuacja, w której uczestnicy ruchu drogowego nie mają już możliwości
zapobiegnięcia kolizji.
II.
W fazie kulminacyjnej – powstają najpoważniejsze następstwa (obrażenia lub śmierć uczestników ruchu
drogowego, uszkodzenie lub zniszczenie samochodu, szkody materialne w środowisku).
III.
Faza końcowa – jest kontynuacją fazy kulminacyjnej i może się zakończyć po zatrzymaniu się wszystkich
pojazdów biorących udział w kolizji drogowej lub trwać dłużej (np. w razie powstania pożaru).
Przyczyny kolizji drogowych:

Wyłącznie czynnik ludzki – 65%
Czynnik ludzki i pojazd – 45%
Czynnik ludzki i otoczenie (droga) – 24%
Czynnik ludzki, pojazd i otoczenie – 1,25%
Wyłącznie otoczenie (droga) – 2,5%
Otoczenie (droga) i pojazd – 0,25%
Wyłącznie pojazd – 2,5%
3. PROGRAMY BADAWCZE W ZAKRESIE BEZPIECZEŃSTWA RUCHU DROGOWEGO
USA - program ESV, PATH,IVHS-intelligent vehicle highway system, PNGV, IHRA
ITS – inteligent transportation Systems, w zakresie którego stworzono grupy funkcjonalne:
ATMS – advanced traffic management systems
ADIS – advanced driver information system
AVCS – advanced vehicle control systems
CV – commercial Vehicles
I . WIELKI EUROPEJSKI PROGRAM PROMETHEUS – Program Europejskiego Ruchu z Najwyższą
Efektywnością i Bezprecedensowym Bezpieczeństwem. Uczestniczyło w nim 13 producentów samochodów z 5
krajów Europy, którego celem było stworzenie współpracy w zakresie opracowania technologii, mającej służyć
poprawie organizacji, efektywności i bezpieczeństwa ruchu drogowego, a także zwiększyć konkurencyjność
europejskiego rynku motoryzacyjnego. Prace prowadzone były w 7 grupach problemowych:
1. PRO-CAR – opracowanie systemów komputerowego wspomagania kierowcy (rozwój i integracja systemów
ABS, ASR, 4WD, 4WS i innych)
2. PRO-NET – system wzajemnej komunikacji między automatycznymi systemami pro-car.
3. PRO-ROAD – system komunikacji między samochodem a siecią informującą o stanie dróg, natężeniu ruchu,
warunkach atmosferycznych itp.
4. PRO-ART. – oprogramowanie samochodowych komputerów pokładowych, z wykorzystaniem systemów
sztucznej inteligencji i logiki rozmytej.
5. PRO-CHIP – opracowanie produkcji modułów elektronicznych.
6. PRO-COM – ujednolicony system informacji między użytkownikami dróg.
7. PRO-GEN – prognozowanie rozwoju transportu drogowego w przyszłości.
II . PROGRAM DRIVER
W Japonii:
PVS – Personal Vehicle System
SSVS – Super Smart Vehicle System
ASV – Advanced Safety Vehicle
ARTS – Advanced Road Transportation System
ITS – Intelligent Transportation System
RVCDS – Road Vehicle Cooperative Driving System.
W analizie ryzyka powstania kolizji drogowej należy uwzględniać następujące kategorie cech:
Psychologiczne
Fizjologiczne (ograniczenia organizmu kierowcy)
Fizyczne, związane z: samochodem (przyspieszenie, hałas, cechy ergonomiczne itd.); otoczeniem (stan dróg,
warunki jazdy).
4. OMÓWIĆ CECHY PSYCHOLOGICZNE KIEROWCY
Myślenie – jest wyższym stopniem procesu poznawczego. Umożliwia odzwierciedlenie w świadomości nie
tylko cech zewnętrznych spostrzeganych przedmiotów, lecz także ich istoty i wzajemnych związków między
nimi. Proces myślenia może przebiegać szybko, ale może też być opóźniony (zmęczenie, alkohol, działanie
leków itp.)

Pamięć – zdolność do odzwierciedlania doświadczeń z przeszłości co jest czynnikiem ułatwiającym właściwe
zachowanie kierowcy w trudnych sytuacjach drogowych. Brak dobrej pamięci powoduje powstawanie
wątpliwości przy podejmowaniu decyzji, przez co zwiększa się ryzyko popełnienia błędu lub opóźnienia
rozpoczęcia prawidłowego działania.
Spostrzeganie – proces poznawczy, związany z wrażeniami i ze zrozumieniem istoty przedmiotów i
zachodzących zjawisk.
Uwaga – jej brak jest jednym z głównych czynników psychologicznych powodujących popełnianie przez
kierowców błędów, które w efekcie prowadzą do powstania kolizji drogowych. Uwaga nie polega na tym,
żeby „wszystko widzieć”, lecz widzieć „wszystko co jest potrzebne”, czyli wyodrębnić spośród innych
potrzebne zjawisko lub przedmiot i skoncentrować się na nim.
Uwaga bierna – występuje bez świadomego zamierzenia człowieka i nie wymagającą od niego wysiłku.
Uwagę bierną może przyciągnąć nieoczekiwane pojawienie się czegoś.
Uwaga czynna – świadome skupienie się na dowolnym obiekcie, w określonym wcześniej celu. Wymaga ona
napięcia i powoduje zmęczenie.
5. CECHY UWAGI KIEROWCY
Podzielność uwagi – postrzeganie wielu bodźców i wykonywanie wielu czynności na raz. W czasie
prowadzenia samochodu kierowca odbiera 5-120 bodźców na minutę. I przy czasie poniżej 0,3-0,4 s rośnie
prawdopodobieństwo niezauważenia lub błędnej interpretacji bodźca.
Ruchliwość uwagi – zdolność do szybkiej zmiany obiektów na które skierowano uwagę, lub przejścia z
jednego rodzaju czynności na drugi.
Trwałość uwagi – pozwala na skoncentrowanie się w ciągu długiego czasu na jednym przedmiocie lub
czynności.
Zakres uwagi – charakteryzuje liczba bodźców w jednostce czasu, na które kierowca potrafi właściwie
zareagować.
Przerzutność uwagi – zdolność do szybkiego przechodzenia od krótkotrwałego stanu koncentracji uwagi na
określonym zjawisku do stanu podzielności uwagi. Przykładem może być tu umiejętność szybkiego przejścia
od luźnej rozmowy z pasażerem podczas jazdy po drodze o małym natężeniu ruchu do skoncentrowania uwagi
na pojawiającym się na drodze zagrożeniu.
6. OMÓWIĆ PROBLEM AGRESYWNOŚCI NA DROGACH
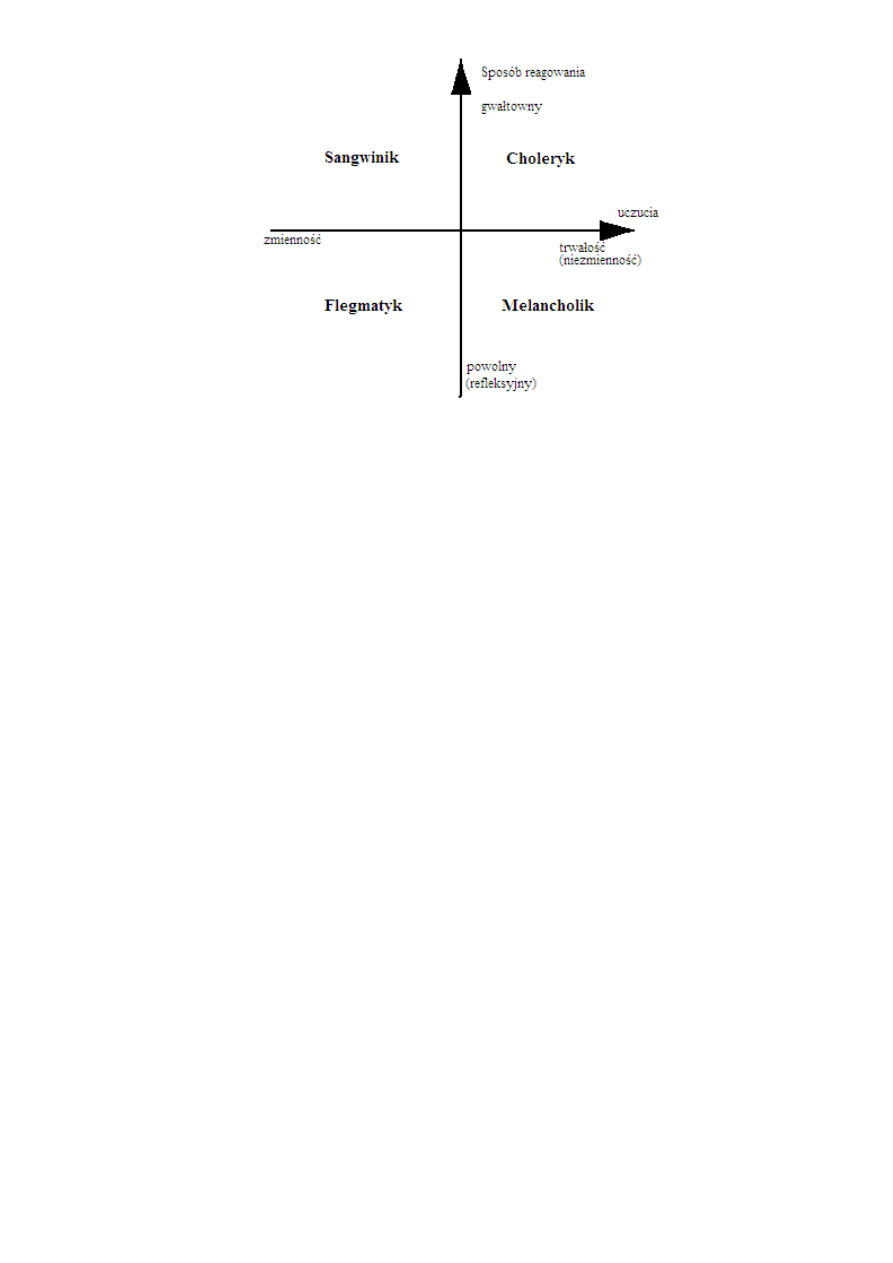
Osobowość kierowcy – system względnie stałych mechanizmów opisujących zachowanie kierowcy w określonych
sytuacjach drogowych.
Strukturę osobowości tworzą:
Procesy emocjonalne
Cechy temperamentu
Motywacje
Nastawienie
Postawy
Ze względu na osobowość wyróżnia się 2 typy kierowców:
Kierowcy inteligentni – potrafi w pełni wykorzystywać nabytą wiedzę i umiejętności, odpowiednio reagować
wobec nowych zadań i nowych sytuacji. Ważna jest tu umiejętność prawidłowego analizowania i interpretacji
odebranych informacji.
Kierowcy agresywni – zachowanie na drodze można nazwać agresywnym, gdy kierowca umyślnie zwiększa
ryzyko kolizji w wyniku manewrów spowodowanych zniecierpliwieniem, złością lub chęcią zaoszczędzenia
czasu.
Biologiczne teorie agresji – uznają, że u podstaw zachowań agresywnych leżą wrodzone cechy człowieka, chociaż
określona odpowiedź może być także modyfikowana przez doświadczenie.
W teoriach psychoanalitycznych przyjmuje się hipotezę frustracji – agresji, podkreślając wagę czynników
zewnętrznych.
Teorie społeczne – agresja jest wyuczona formą reagowania, którą człowiek opanowuje obserwując lub naśladując
innych. Wielu badaczy uważa, że zachowania agresywne są efektem łącznego oddziaływania tych czynników.
Agresywną jazdę można podzielić na:
Chroniczną – charakteryzuje kierowców, którzy przyswoili na stałe taki styl jazdy. Cechą charakterystyczną
jest to, że nie przyznają się do agresywnej jazdy, a bardzo często uznają, że ich styl jazdy jest najbardziej
bezpiecznym sposobem prowadzenia samochodu.
Sytuacyjna – gdy za zwyczaj bezpieczny i odpowiedzialny kierowca staje się agresywny pod wpływem
pewnych okoliczności.
W grupie kierowców chronicznie agresywnych szczególnie niebezpieczni są kierowcy, których cechuje tzw. Postawa
strażnika. Starają się oni straszyć lub karać innych kierowców za zachowania, które ich samych denerwują.
Najczęściej gdy inni kierowcy wykonują manewry, które ci kierowcy rezerwują wyłącznie dla siebie, z racji
domniemania posiadanych przez siebie większych umiejętności.
Agresywni kierowcy to najczęściej mężczyźni w wieku 18-26 lat. W 96% mężczyźni, w 4% kobiety.
Na bezpieczną jazdę bardzo silny wpływ mają stany psychiczne kierowcy. Dany stan psychiczny może być
wywołany:
Znużeniem i zmęczeniem natury psychicznej – znużenie stanowi pewien rodzaj osłabienia aktywności
psychicznej. W fazie skrajnej może prowadzić do zaniku odbioru bodźców zewnętrznych oraz znacznego
spowolnienia reakcji w układzie nerwowym.
Zamroczeniem alkoholowym
Odurzeniem środkami farmakologicznymi
Lękiem przed prowadzeniem – powoduje niewiarę we własne możliwości, usztywnienie ruchów, nadmierną
koncentrację uwagi, na tym co dzieje się przed pojazdem, nerwowość. Towarzyszy mu poczucie bezsilności i
braku równoprawnego kontaktu z otoczeniem.
Napięcia emocjonalne – stan przejściowy, jaki może wystąpić u kierowcy, u którego nie zauważono żadnych
wyraźnych zaburzeń osobowości. Powodowane są silnymi przeżyciami (zgon kogoś bliskiego, konflikt w
rodzinie, utrata pracy itp.). kierowcy w takim stanie na ogół nie uświadamiają sobie w jak znacznym stopniu
osłabiona jest ich sprawność psychiczna.
7. OMÓWIĆ CECHY FIZJOLOGICZNE KIEROWCY
8. Podstawowe pojęcia dotyczące widzenia (wzroku)
1 – wzrok, 2 – czas reakcji, 3 – wiek kierowcy, 4- płeć, 5- stan zdrowia.
Wzrok (widzenie) – to zmysł pozwalający odbierać bodźce świetlne. Widzenie to zdolność postrzegania
przestrzennego (stereometrycznego i stereoskopowego) przedmiotów oraz rozróżniania ich wielkości, kształtów, barw
i ruchu. Pozwala to na prawidłową ocenę zdolności i prędkości obiektów (pojazdów, ludzi, zwierząt itp.) znajdujących
się w polu widzenia.
Pole widzenia – określają kąty widzenia dla każdego oka. Poziomy kąt widzenia powinien wynosić ±90˚. Pionowy kąt
widzenia (±50˚;±80˚). Dla obu oczu poziome pole widzenia wynosi ok. 120˚÷160˚. Do prawidłowego obserwowania
drogi w zasadzie wystarczający jest kąt ok. 60˚.
OLŚNIENIE – to okresowa utrata możliwości widzenia wywołana zbyt dużym kontrastem jasności (np. zbyt mocne
światła reflektorów samochodu jadącego z przeciwka).
ZDOLNOŚĆ ADAPTACJI – zdolność przystosowania wzroku do aktualnego natężenia światła poprzez odpowiednie
zwężenie lub rozszerzenie źrenicy oka. Dotyczy ona również przypadku odwrócenia głowy w bok, po którym czas
adaptacji wynosi ok. 0,3÷1,0 s.
ZDOLNOŚĆ AKOMODACJI – zdolność przystosowania układu optycznego oka do wyraźnego widzenia (ostrość
obrazu) poprzez odpowiednie uwypuklenie soczewki oka i dopasowanie ostrości widzenia przedmiotu w zależności
od jego odległości. U starszych osób całkowity czas akomodacji może wynosić nawet 6÷7 s.
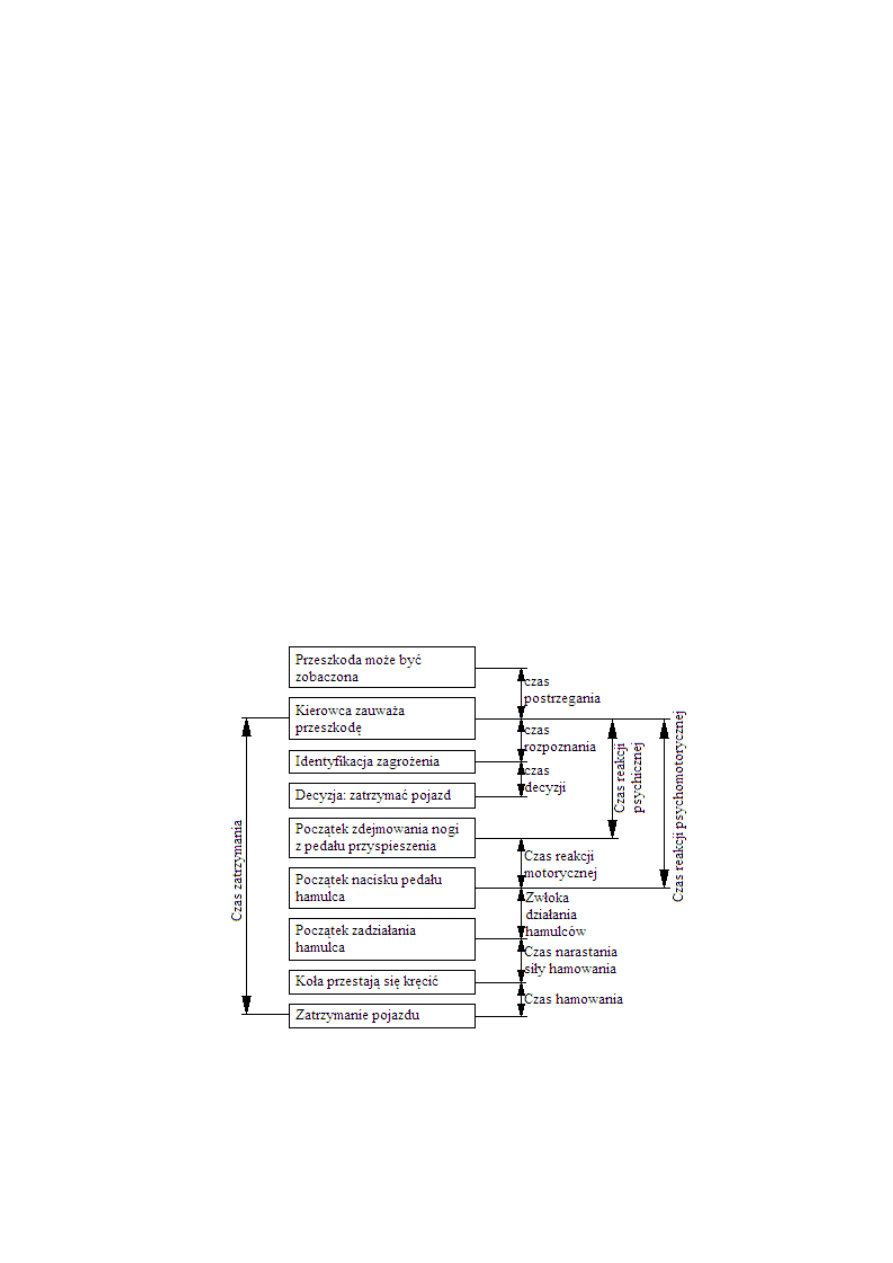
9. OMÓWIĆ ZAGADNIENIA CZASÓW REAKCJI KIEROWCÓW
CZASY W PROCESIE HAMOWANIA
Wiek kierowcy – krzywa wannowa wypadków - przy wieku , z udziałem pieszych. Najwięcej wypadków z
udziałem dzieci w wieku 6-9 lat oraz z osobami starszymi po 70 roku życia.
Płeć
Stan zdrowia
10. METODY WYZNACZANIA CZASÓW REAKCJI (ŚRODOWISKA BADAWCZE),

Badania na prostych stanowiskach badawczych (zbliżonych do obecnie stosowanych stanowisk do badań
psychotechnicznych kierowców) – manipulatory i mierniki czasu redukcji MCR-2001E. Najczęściej wyznacza
się: czas reakcji prostej; czas reakcji złożonej.
Eksperymenty na drogach lub torach badawczych – zaletą tych badań jest to, że kierowca kieruje rzeczywistym
samochodem, a zatem zachowane są naturalne warunki pracy kierowcy. Czynnikiem różnicującym te badania jest
wybór bodźca (zespołu bodźców)m na które ma reagować kierowca i praktyczna realizacja tego wyboru. Bodziec,
na który ma reagować kierowca, może być wytworzony sztucznie przez zainstalowanie w danym samochodzie
dodatkowe urządzenie, np..: dźwięk specjalnie zainstalowanego dzwonka; bodziec wytwarzany przez specjalne
stymulatory, w postaci układu kolorowych lampek, przyklejony na przedniej szybie. Kolor i układ lampek
oznaczał odpowiedni manewr. Coraz częściej realizowane są badania w których bodźcem jest sytuacja drogowa w
zainscenizowanym scenariuszu badań.
Przykłady:
Najprostszy scenariusz: jazda za samochodem pilotującym. Zadaniem osoby badanej jest reagowanie
na zapalające się światła hamulcowe samochodu poprzedzającego; Prostopadłe wtargnięcie
samochodu na skrzyżowanie.
Badania w symulatorach jazdy – symulatory jazdy to urządzenia, w których kierowca kieruje samochodem
posługując się tymi samymi elementami sterowania, jak w rzeczywistym samochodzie (gaz, hamulec,
kierownica). Jednak ruch samochodu realizowany jest w środowisku wirtualnym. W pierwszych powst.
Symulatorach wyświetlany był na dużym ekranie, nagrany na taśmie filmowej i zapętlony widok wybranego
odcinka drogi. We współczesnych, wykorzystywane są możliwości wizualizacji komputerów i specjalnego
oprogramowania graficznego.
Symulatory:
Odwzorowujące sytuację drogową na monitorze komputera
Symulatory z dużymi ekranami: statyczne (odwzorowany wyłącznie obraz); dynamiczne
(odwzorowywane są również siły działające na kierowcę, np.: siły bezwładności podczas hamowania
lub w ruchu krzywoliniowym); interaktywne.
Badania w rzeczywistych warunkach – badania typu obserwacja, w rzeczywistych warunkach ruchu drogowego
polegają na umieszczeniu odpowiedniego układu kamer w miejscach o dużym natężeniu ruchu (najczęściej na
skrzyżowaniach) gdzie często dochodzi do wypadków i kolizji drogowych. Zaletą jest to, że kierowcy prowadzą
rzeczywiste samochody, w rzeczywistym środowisku ruchu drogowego. Wady: problem ze stwierdzeniem, który
moment uznać za początek zagrożenia (od którego mierzone będą czasy reakcji kierowców); również w pewnym
przybliżeniu określany jest koniec czasu reakcji; brak możliwości uzależnienia wyników od wieku, zmęczenia,
stanu trzeźwości.
Czasy postrzegania i reakcji wg badań amerykańskich:
W dzień 1,75 s (postrzegania – 1,0 s, reakcji 0,75 s)
W nocy 2,5 s (postrzegania – 1,5 s, reakcji 1 s).
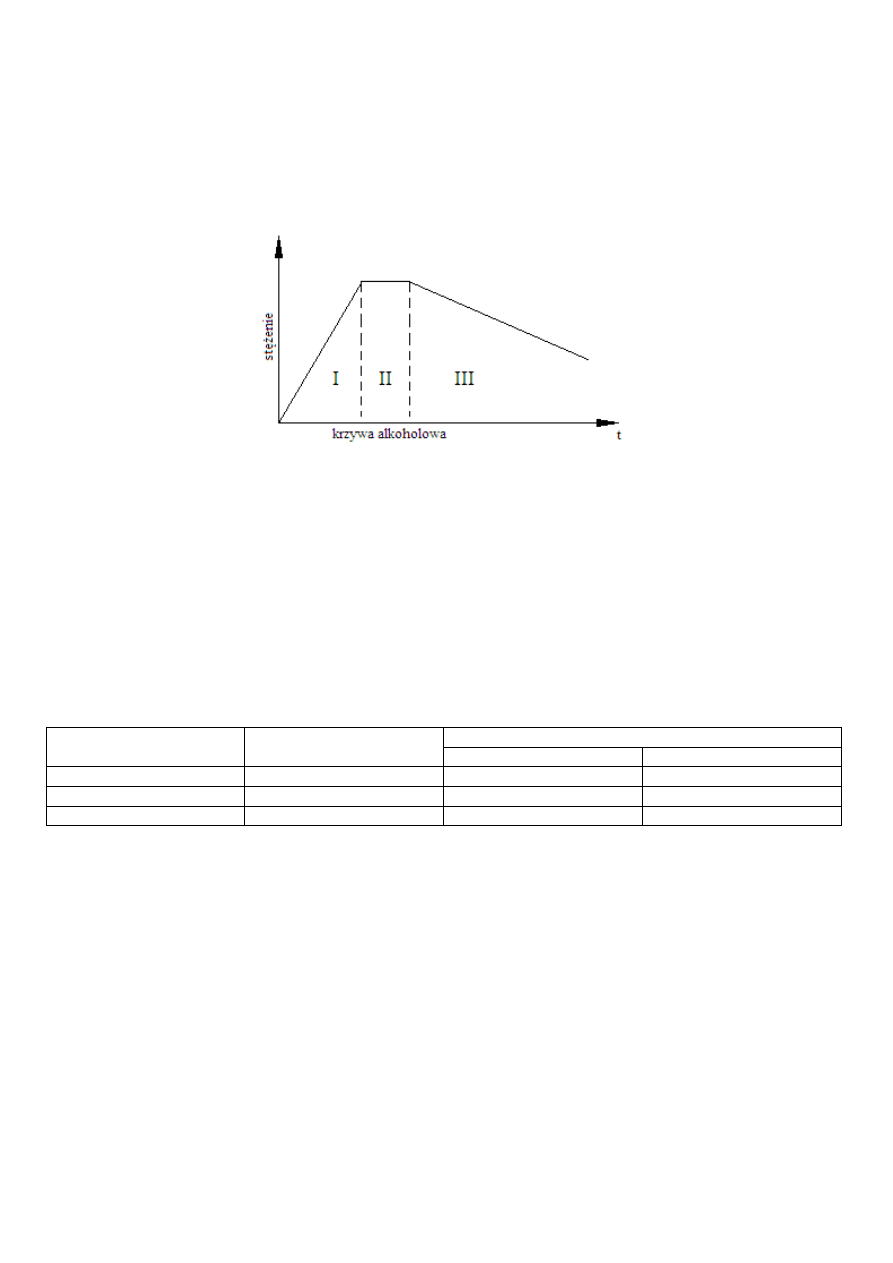
11. PROBLEM ALKOHOLU. OCENA STANU TRZEŹWOŚCI; KRZYWA ALKOHOLOWA
Fazy przemiany alkoholu w organizmie:
I . wchłaniania – szybkość wchłaniania alkoholu z przewodu pokarmowego do krwi jest proporcjonalna do stężenia
czystego alkoholu w wypitym napoju. Intensywność wchłaniania zależy też od szybkości picia i ilości już wcześniej
wypitego alkoholu. Proces wchłaniania odbywa się głównie na zasadzie dyfuzji (wyrównywania stężeń), co oznacza
że napoje o małej zawartości wchłaniają się wolniej. Napoje o dużym stężeniu alkoholu mogą spowodować
uszkodzenie powierzchni śluzówki przewodu pokarmowego, co utrudnia dyfuzję i wydłuża proces wchłaniania.
Najszybciej jest wchłaniany alkohol z napojów 15-30%. Wchłanianie alkoholu zależy też od ilości i rodzaju
pokarmów wypełniających żołądek. Stężenie alkoholu spożytego po posiłku może być niższe nawet o 30-50%, niż
przy tej samej dawce wypitego na czczo. Czas wchłaniania wynoszący średnio ok. 1,5h (90min) może w różnych
przypadkach zwierać się w granicach od 20 do 160 min.
II. wyrównania stężeń – w fazie tej szybkość wchłaniania alkoholu i szybkość wydalania zrównują się, zatem stężenie
alkoholu jest wówczas najwyższe z całego cyklu przemiany alkoholu.
III. eliminacji - alkohol jest eliminowany z organizmu:
W około 96÷98% na drodze przemian biochemicznych (metabolizm w wątrobie)
W około 1÷2% wydalanie z moczem
W około 1÷2% wydalanie z oddechem
Śladowo wydalanie z potem.
Zdrowy dorosły człowiek w ciągu 1h eliminuje około 0,1g alkoholu na 1kg masy ciała, czyli przy wadze 70÷100kg
7÷10g/h. obliczenia retrospektywne przeprowadza się posługując się zależnością C
o
=c
1
+βt, gdzie: C
o
-poszukiwana
wartość stężenia alkoholu w chwili wypadku, C
1
-wartość stężenia alkoholu w chwili pobierania próbki do badań,
t-czas jaki wpłynął od chwili wypadku do chwili pobrania próbki do badań, β- współczynnik eliminacji waha się od
0,07 do 0,28% na godzinę (czasem przedział jest zawężany do 0,12÷0,15‰ /h). Ocena stanu trzeźwości w Polsce -
ustawową miarą jest zawartość alkoholu we krwi wyrażana w promilach.
Stężenia alkoholu we krwi:
0,01÷0,2‰ – stężenie fizjologiczne ( w praktyce przyjmuje się że człowiek jest trzeźwy)
0,2÷0,5‰ – nie stanowi istotnego zagrożenia, chociaż niektórzy kierowcy mogą już stwarzać
niebezpieczeństwo w ruchu drogowym
0,5÷1,0‰ – każdy kierowca może być niebezpieczny dla ruchu drogowego
>1,0‰ – każdy jest niebezpieczny dla ruchu drogowego.
Według polskich badań zagrożenie wypadkowe wzrasta:
6÷9 krotnie w przypadku nietrzeźwych kierowców
2÷2,5 krotnie w przypadku nietrzeźwych pieszych.
Dla stężenia alkoholu 0,5-1,0‰ czas reakcji kierowcy wydłuża się o około:
40 % na bodźce wzrokowe
30 % na bodźce słuchowe.
V
Droga hamowania [m]
Droga potrzebna do zatrzymania
Kierowca trzeźwy
Kierowca nietrzeźwy
60
18
26
43,6
80
32
44
70,4
120
72
88
123,2
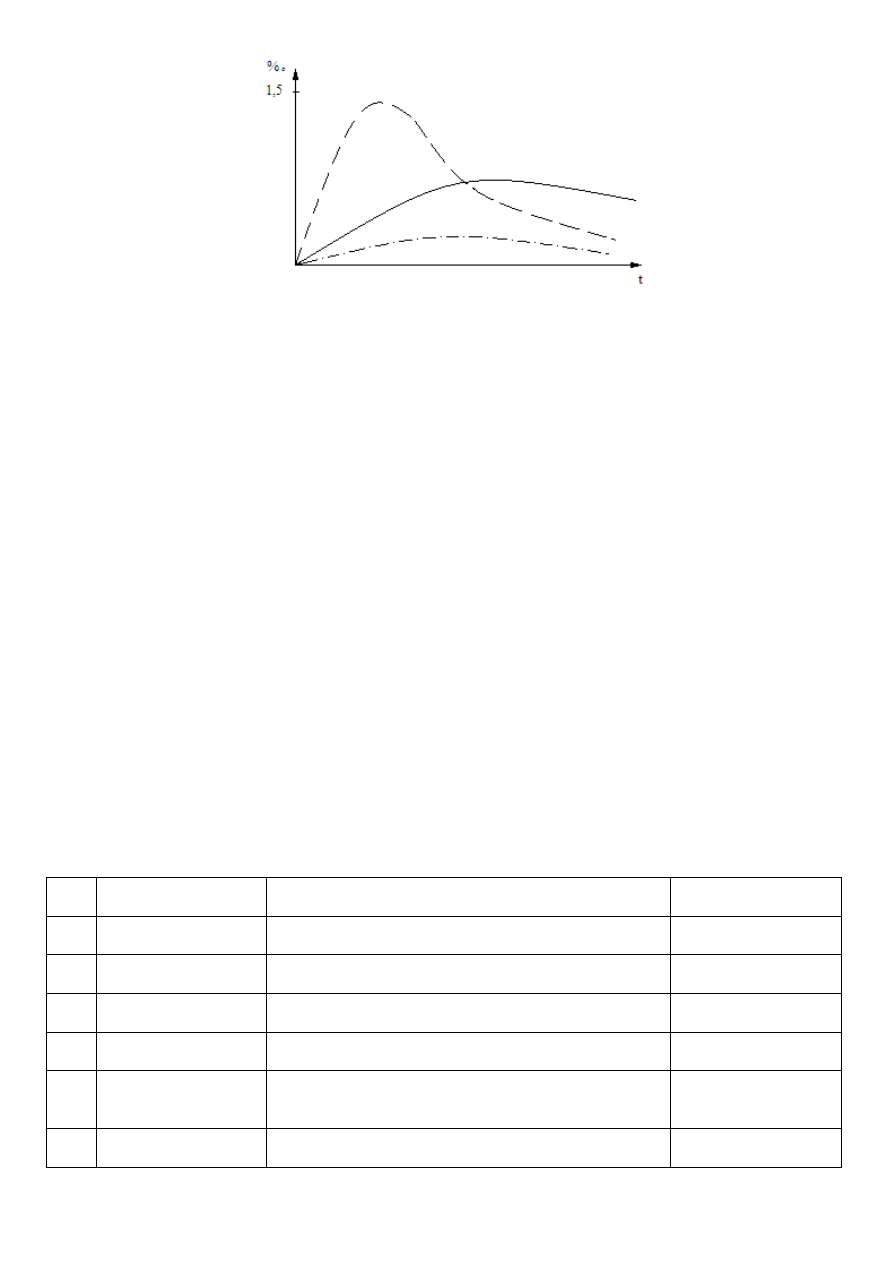
TYPY KRZYWYCH ALKOHOLOWYCH
Linia ciągła – „krzywa normalna” występuje po spożyciu umiarkowanej ilości alkoholu niezbyt stężonego,
gdy żołądek jest nieznacznie wypełniony treścią pokarmową.
Linia przerywana – „krzywa stroma” – występuje po szybkim spożyciu alkoholu wysoko stężonego na pusty
żołądek.
Linia typu oś – „krzywa spłaszczona” występuje przy spożyciu alkoholu rozciągniętym w czasie.
WPŁYW ŚRODKÓW FARMAKOLOGICZNYCH NA ZDOLNOŚĆ PROWADZENIA POJAZDU
Prawo o ruchu drogowym nie zakazuje kierowania pojazdem po środkach farmakologicznych (lekach), a jedynie
zabrania po „środkach działających podobnie do alkoholu”. Na sprawność psychofizyczną wpływają następujące
grupy leków:
Psychotropowe – mogą pobudzać jak i osłabiać sprawność psychofizyczną. Nie ma ustawowego ograniczenia
prowadzenia pojazdów po tych lekach. Wiążąca jest opinia lekarza. Przeciwwskazane są neuroleptyki.
Przeciwdepresyjne – mogą tak silnie działać na układ nerwowy, że praktycznie uniemożliwiają prowadzenie
samochodu. Należy pamiętać, że większość leków przeciwko chorobie lokomocyjnej ma działanie
przeciwdepresyjne i obniża sprawność psychofizyczną.
Środki znieczulające – po znieczuleniu miejscowym zakaz prowadzenia samochodu wynosi 2 h, po
zastosowaniu środka do kilkunastominutowego znieczulenia ogólnego 7h.
Nasenne – niektóre mają przedłużone działanie (np. luminal – do 7h) i w tym czasie nie należy prowadzić.
Nienarkotyczne leki przeciwbólowe – po ich zażyciu w zasadzie można prowadzić samochód, ale należy
zachować szczególną ostrożność i mieć świadomość, że sprawność psychofizyczna mogła ulec osłabieniu.
Narkotyczne leki przeciwbólowe – po ich zażyciu obowiązuje bezwzględny zakaz prowadzenia samochodu.
Antybiotyki i sulfamidy – nie ma zakazu prowadzenia pojazdów po tych lekach, jednak mogą wywoływać
chwilowe stany osłabienia, zaburzenia równowagi itp.
Leki psycho- pobudzające – poprawiają na ogół sprawność psychofizyczną kierowcy i ułatwiają prowadzenie
samochodem, ale niektóre w większych dawkach (kofeina) mogą obniżyć zdolność samooceny, oceny
sytuacji drogowej oraz wywołać zaburzenia koordynacji ruchów.
BIOMECHANIKA OBRAZU
Badania z udziałem trupów
Badania z udziałem wolontariuszy
Badania na zwierzętach
12. OMÓWIĆ Skalę obrażeń AIS (Abbreviated injury scale)
AIS
Stopień obrażeń
Opis obrażeń
Prawdopodobieństwo
śmierci [%]
1
Lekkie
Powierzchowne otarcia lub rany cięte, siniaki, złamanie
kości nosowej, złamanie żebra
0
2
Średnie
Głębokie rany, wstrząśnienie mózgu z utratą
przytomności poniżej 15 min, złamanie mostka lub żeber
0,07
3
Ciężkie
Wstrząśnienie mózgu z utratą przytomności do 1h,
złamanie barku pęknięcie przepony, utrata oka
2,91
4
Bardzo ciężkie
Udar mózgu z utratą przytomności do 24h, pęknięcie
śledziony, żołądka, utrata nogi powyżej kolana.
6,88
5
Krytyczne
Udar mózgu z utratą przytomności >24h, pęknięcie jelit,
wątroby, mięśnia sercowego, uszkodzenie rdzenia
kręgowego z porażeniem.
32,32
6
Nieprzeżyciowe
Pęknięcie czaszki, zgniecenie klatki piersiowej, pęknięcie
kręgosłupa na wysokości 3 kręgu szyjnego lub wyżej.
100,00
Zależność między prędkością zderzenia a obrażeniem wyrażonym w skali AIS dla zderzenia z pieszym
AIS = a+bv+cv
2
, gdzie: v – prędkość samochodu [m/s].
Dla uderzenia pierwotnego: a-b=0.
Wartość współczynnika c
[
]
Rodzaj nadwozia
Dorośli
Dzieci
Klinowe
0,0155
0,1900
Pomtomowe
0,0250
0,0285
Dla uderzenia wtórnego c=0
Wartość współczynników a[-] i b [s/m]
Rodzaj
nadwozia
Dorośli
Dzieci
a
b
a
b
Klinowe
0,76
0,055
0,76
0,055
Pontonowe
1,0
0
0,817
0,072
OCENA OBRAŻEŃ POSZCZEGÓLNYCH CZĘŚCI CIAŁA
13. MECHANIKA OBRAŻEŃ GŁOWY; KRYTERIA OCENY
1. Obrażenia głowy
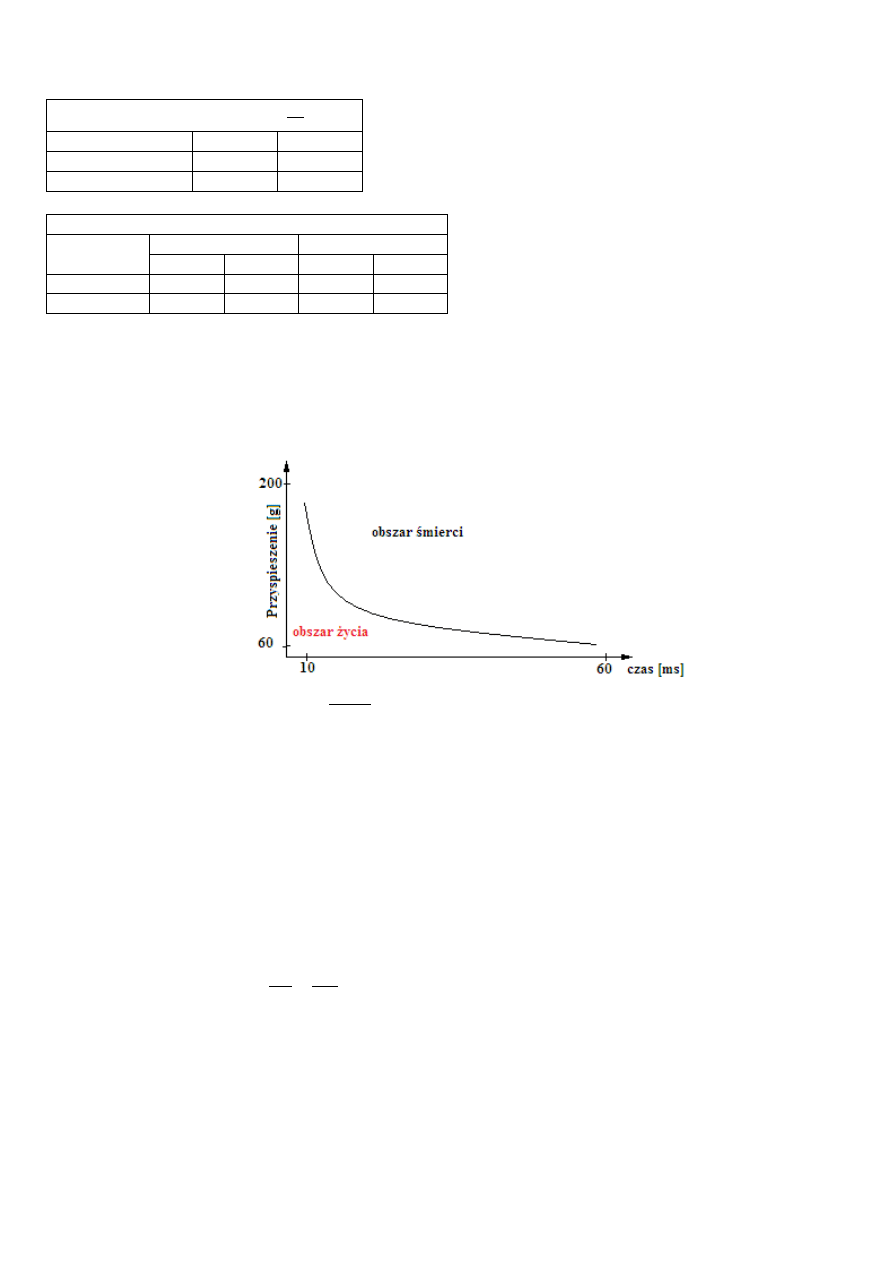
Krzywa WSTC zmodyfikowana przez Patricka – zależność dopuszczalnych przyspieszeń przenoszonych
przez głowę od czasu trwania impulsu ( krzywa przeżycia)
Kryterium HIC,
[
∫
]
2,5
(t
2
– t
1
). Gdzie: (t2-t1)- całkowity czas działania
przyspieszenia, a(t) – wypadkowe przyspieszenie środka głowy w g, t- czas w sekundach.
Security Indeks (SI) – indeks zagrożenia (ostrości)
∫
. Jako wartość przyspieszenia a(t) w
obu tych wzorach przyjmuje się wypadkową wartość przyspieszeń mierzonych w 3 wzajemnie
prostopadłych kierunkach.
Jako kryterium przeżycia przyjęto HIC<1000 oraz SI<1000. Kryteria te są inne dla dzieci. NHTSA przyjęła:
HIC
36
=1000 – dla manekinów Hybrid III reprezentujących 30-centylowego mężczyznę, 5-centylową kobietę i 6-letnie
dziecko.
HIC
38
=900 – dla manekinów Hybrid III reprezentującego 3-letnie dziecko.
Kryteria te nie są 100% pewne. Np. dla HIC=1000 i dla czasu trwania impulsu nie przekraczającego 15ms.
14. MECHANIKA OBRAŻEŃ GÓRNEGO ODCINKA KRĘGOSŁUPA I klatki piersiowej
najczęściej stosowane jest kryterium NIC (Neck Injury Criterion) NIC=0,2∙a
rel
+V
2
rel
,
kryterium Nij
, F
2
,M
r
– obciążenie osiowe i moment zginający. F
int
, M
int
– wartości
krytyczne.
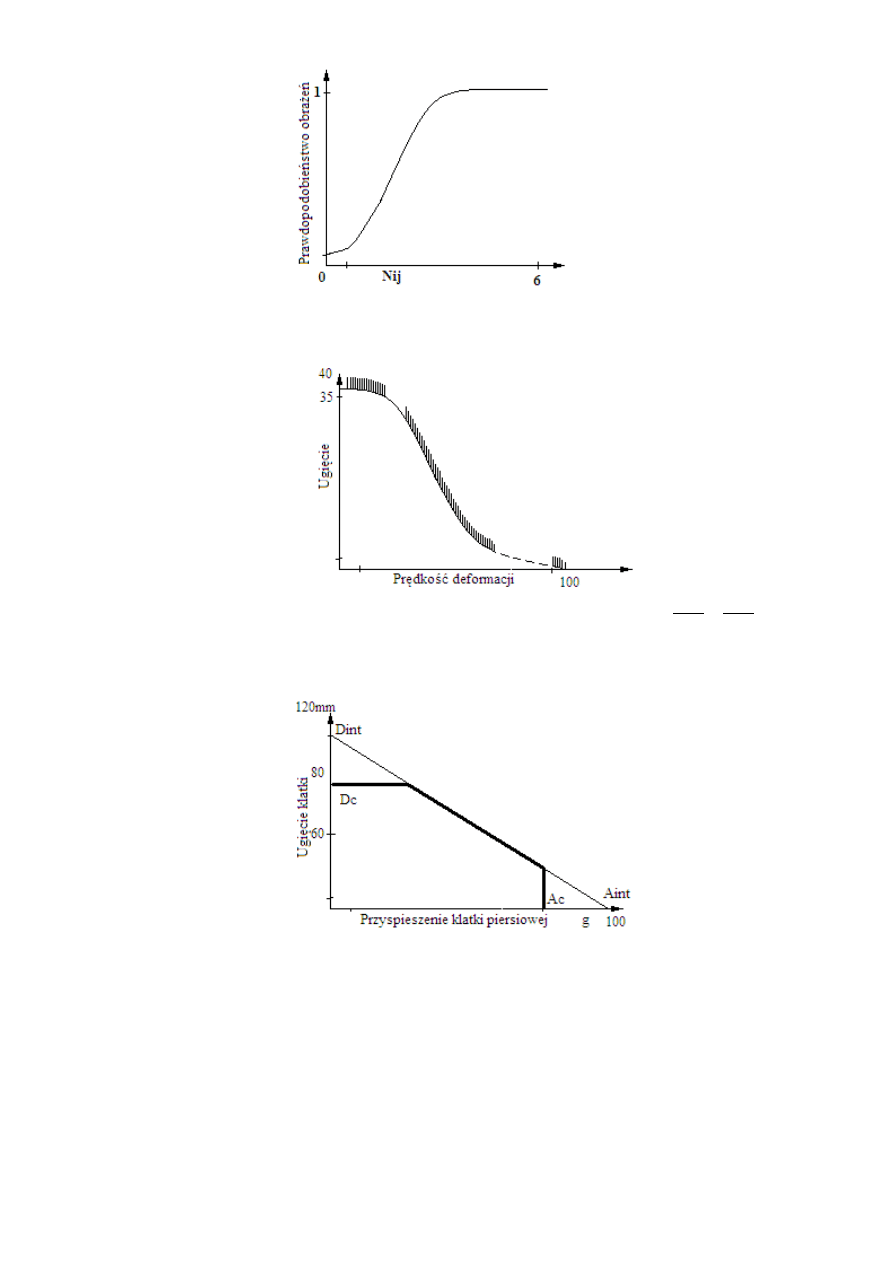
Prawdopodobieństwo obrażeń kręgosłupa w skali AIS
(p
3
(Nij)=p(AIS
2. Kryteria oceny obrażeń klatki piersiowej – dla oceny obrażeń klatki piersiowej sformułowano tzw. kryterium
wiskotyczne VC. Jego podstawą jest iloczyn prędkości uginania klatki piersiowej ( V-velocity) i chwilowych
wartości ugięcia klatki (C-compression).
Obecnie najczęściej stosowane jest kryterium CTI (combined Thoracic Index): CTI=
; gdzie: A
max
i D
max
– największe obserwowane przyspieszenie i ugięcie klatki piersiowej, A
int
i D
int
– największe
dopuszczalne przyspieszenie i ugięcie klatki piersiowej.
Ograniczenie CTI dla manekinów reprezentujących 50-centylowego mężczyznę:
15. ZDERZENIE SAMOCHODU Z PIESZYM – skutki zderzenia z pieszym zależą najsilniej od prędkości
uderzenia oraz od kształtu nadwozia: klinowe, trapezowe, pontonowe, skrzynkowe.
?
?
?
16. WŁASNOŚCI SAMOCHODU I SYSTEMY MAJĄCE WPŁYW NA BEZPIECZEŃSTWO CZYNNE
SAMOCHODU
1. Własności samochodu:
Skuteczność hamowania (układ hamulcowy)
Kierowalność samochodu (układ kierowniczy)

Stateczność samochodu
Dynamiczność napędu samochodu (zdolność przyspieszania)
Własności zawieszenia (współpraca koło- droga)
2. Systemy wspomagania pracy kierowcy (systemy asystenckie)
ABS,ESP, ASR, WS, BAS, 4WD, ACC, LGS, PA, GPS, inne
3. Inne własności samochodu
Zewnętrzna informacyjność samochodu (oświetlenie drogi, sygnalizacja świetlna, światła
odblaskowe, kolor nadwozia, sygnał dźwiękowy)
Wewnętrzna informacyjność samochodu (widoczność z miejsca kierowcy, tablica rozdzielcza, odbiór
sygnałów dźwiękowych)
Komfort i ergonomia stanowiska pracy kierowcy (fotel, urządzenia sterowania, wentylacja…)
17. SKUTECZNOŚĆ HAMOWANIA; DOSKONALENIE UKŁADÓW HAMULCOWYCH SAMOCHODU
Wymagania dotyczące hamulców roboczych:
Skuteczność hamowania – rozumiana jako możliwość uzyskania dużego opóźnienia i krótkiej drogi
hamowania
Stateczność hamowania – rozumiana jako zdolność samochodu do zachowania – w czasie hamowania –
założonego kierunku jazdy.
Główne czynniki utrudniające zapewnienie skuteczności i stateczności hamowania:
Zmienne i niesymetryczne obciążenie statyczne osi samochodu, zależne od liczby pasażerów w samochodach
osobowych i w autobusach oraz od wielkości i rozłożenia ładunku w samochodach ciężarowych
Obciążenie osi przedniej i obciążenie osi tylnej przy hamowaniu
Dociążenie kół zewnętrznych i odciążenie kół wewnętrznych podczas hamowania przy jeździe po łuku
Wady pneumatycznych układów hamulcowych:
Długi czas zwłoki zadziałania układu
Niska jakość regulacji spowodowana dużą histerezą podzespołów
Stała charakterystyka zaworów uniemożliwia optymalny rozkład siły hamowania w pojeździe oraz
dynamiczne dopasowanie siły hamowania ciągnika i przyczepy
Duża liczba wymaganych charakterystyk prowadzi do dużej liczby wariantów podzespołów
Duża liczba połączeń między podzespołami; a także zewnętrzne połączenia to potencjalna nieszczelność,
mogąca być przyczyną awarii systemu
Zalety pneumatycznych układów hamulcowych:
Możliwość uzyskiwania dużych wartości sił hamowania
Dogodna możliwość podłączenia układu hamulcowego przyczepy do układu hamulcowego samochodu
ciągnącego, bez naruszenia sprawności jego działania
Skuteczność działania hamulców, mimo możliwych małych nieszczelności układu
Wymagania dotyczące stosowania systemów ABS:
Zgodnie z regulaminem 13EKG oraz normami polskimi, ABS nie jest urządzeniem obowiązkowym w
samochodach osobowych.
Od 01.10.1991 w autobusach dalekobieżnych i turystycznych o max masie >12t, w samochodach ciężarowych
i ciągnikach siodłowych o masie >16t oraz w przyczepach i naczepach o masie >10t wprowadzono obowiązek
stosowania ABS
Od 01.04.1998 we wszystkich autobusach, ciężarówkach o masie >7,5t oraz przyczepach i naczepach o masie
>5t
Od 1.04.1999 we wszystkich samochodach ciężarowych.
18. OMÓWIĆ ZAGADNIENIA KIEROWALNOŚCI, STATECZNOŚCI, ZDOLNOŚCI PRZYSPIESZANIA I
WSPÓŁPRACY KOŁO-DROGA
Wymagania dotyczące układu kierowniczego:
możliwość łatwej realizacji skrętu, także podczas ruchu z małą prędkością
samoczynny powrót kół kierowanych do kierunku jazdy na wprost
tłumienie oddziaływań dynamicznych od drogi na koła kierowane nie przekazywanie skutków tych
oddziaływań na koło kierownicy

wysoka niezawodność i pewność działania.
W celu poprawienia kierowalności wprowadza się:
mechanizmy wspomagające (mechaniczne, pneumatyczne, hydrauliczne, elektrohydrauliczne, elektryczne)
systemy 4WS (Four Wheel Steering) 4 koła kierowane
tylną oś samo skrętną
aktywne układy kierownicze
steer by wire
Mechanizmy wspomagające wprowadza się w celu:
zmniejszenia wysiłku kierowcy
zapewnienia krótkiego czasu reakcji układu kierowniczego.
Obecnie wymaga się aby zachowana została możliwość kierowania pojazdem przy niesprawnym mechanizmie
wspomagającym
Rozwiązania wpływające na stateczność samochodu:
zwiększenie rozstawu kół (najlepiej widać przy samochodach małych rozmiarów)
zwiększenie rozstawu osi
zmniejszenie aerodynamicznej siły nośnej (samochody rozwijające duże prędkości)
rozwój ogumienia (podwyższenie współczynnika przyczepności, niskoprofilowe, zimowe, uwzględniające
akwaplaning itp.).
Rozwiązania wpływające na dynamiczność napędu samochodu (zdolność przyspieszania)
zwiększenie elastyczności momentu napędowego silnika:
turbodoładowanie
wtrysk paliwa (jedno- i wielopunktowy)
rozwój elektronicznych, precyzyjnych systemów sterowania pracą silnika
inne
rozwój skrzyń biegów
zwiększenie liczby biegów do 5 lub 6
zagęszczenie biegów wyższych
inne.
Rozwój zawieszeń samochodowych:
zawieszenia aktywne (układ czujników + układ wykonawczy, układ generuje podczas jazdy po dołach siłę w
przeciwfazie i następuje zniwelowanie wstrząsów)
zawieszenia semiaktywne (półaktywne) zapotrzebowanie samochodu na energię wzrasta o 3-5%
amortyzatory o zmiennym tłumieniu
inne.
Poprawiając komfort wpływają na zmniejszenie zmęczenia kierowcy
Poprawiają współpracę: koło- droga.
19. Wpływ zewnętrznej i wewnętrznej informacyjności oraz komfortu i ergonomii na bezpieczeństwo
1. Zewnętrzna informacyjność samochodu:
Oświetlenie drogi
Zwiększanie strumienia świetlnego
Oświetlenie adaptacyjne
Koncepcja światła zakrętowego i inne
Sygnalizacja świetlna
Dodatkowe światło stop
Dodatkowe kierunkowskazy w obudowie lusterek
Oświetlenie tylne – diody świetlne LED
Światła odblaskowe
Zwiększanie powierzchni

Doskonalenie techniki odblaskowej
Kolor nadwozia
Sygnał dźwiękowy
2. Wewnętrzna informacyjność samochodu
Widoczność z miejsca kierowcy
Stosowanie kamer wstecznych w samochodach ciężarowych
Minimalizacja martwego kąta
Automatycznie ściemniane lusterko wsteczne
Tablica rozdzielcza
Rozmieszczenie najważniejszych wskaźników bezpośrednio przed kierowcą
Kolorystyka, kontrastowość i podświetlenie wskaźników
Ograniczanie nadmiaru informacji
Stosowanie rozpoznawalnych ikon.
BEZPIECZEŃSTWO CZYNNE
20. BUDOWA I WŁASNOŚCI SYSATEMU ABS
Główne elementy układu ABS:
1 - czujniki prędkości obrotowych kół, współpracujące z wieńcami zębatymi przy kołach
2 - elektroniczny układ sterujący (sterownik)
3 - hydrauliczny układ sterujący (modulator)
Schemat układu hydraulicznego (dla jednego koła):
1 - pompa hamulcowa,
2 - zawór dolotowy,
3 - zawór wylotowy,
4 - pompa powrotna,
5 - tłumik,
6 - akumulator ciśnienia,
7 – hamulec.
Ponieważ w samochodzie nie ma możliwości bezpośredniego zmierzenia prędkości jazdy (pomiar odbywa się za
pośrednictwem kół), nie ma też możliwości dokładnego wyznaczenia poślizgu kół. Wielkościami mierzonymi są
prędkości obrotowe kół, rejestrowane za pomocą czujników. Na podstawie tych prędkości obrotowych można dla
znanych promieni kół obliczyć ich prędkości obwodowe, a następnie także zmiany tych prędkości w czasie, czyli
przyspieszenia lub opóźnienia obwodowe kół. Dopiero na ich podstawie elektroniczny układ sterujący może
oszacować wartości poślizgu poszczególnych kół, a następnie generować sygnały sterujące ciśnieniem w
poszczególnych mechanizmach hamulcowych. Ze względu na trudność realizacji sterowania ciśnieniem za pomocą
zaworów, które umożliwiałyby uzyskanie ciśnienia proporcjonalnego do elektrycznego sygnału sterującego, w
układzie ABS stosuje się trzystanowy system regulacji: zwiększanie ciśnienia, utrzymywanie ciśnienia lub
zmniejszanie ciśnienia.
21. BUDOWA I WŁASNOŚCI SYSTEMU ASR – Automatic Stability Requirement układ regulujący poślizg kół
napędzanych (zapobiegający blokowaniu) można go znaleźć również pod nazwami: ATC – Automatic Traction
Control, TCS – traction control system, TC – Traction Control, ETC – Electronic Traction Control. System ASR:
1) czujnik prędkości kół, 2) hamulce kół, 3)modulator ABS i ASR, 4)sterownik Motronic, 5)sterownik (CPU)ABS
i ASR, 6)element sterowania przepustnicą silnika.
Zalety systemu ASR:
Poprawia właściwości trakcyjne samochodu (zwiększa np. zdolność pokonywania wzniesień, przeszkód
terenowych)
Przeciwdziała utracie sterowności samochodu podczas ostrego ruszania, jazdy na zakrętach i nawierzchniach
o różnej przyczepności, a także podczas gwałtownego przyspieszania i wyprzedzania.
Przeciwdziała „składaniu się” pojazdów wieloczłonowych podczas przyspieszania
Zmniejsza zużywanie się opon (koła nie „buksują”).
Informuje kierowcę poprzez lampkę kontrolną że zbliżył się do granic przyczepności nawierzchni.

22. Budowa i własności systemów ESP – Electronic Stability Programm – system sterowania dynamiką poprzeczną
samochodu. Jego zadaniem jest utrzymanie w miarę możliwości, wybranego przez kierowcę kierunku jazdy.
Potrafi on „poprawić” niewłaściwe działania kierowcy. Jeżeli elektroniczna jednostka sterująca oceni, że są one
nieadekwatne do aktualnych potrzeb, to jej polecenia są nadrzędne.
Budowa ESP: 1)hamulce kół, 2)czujniki prędkości obrotowej kół, 3)sterownik CPU, 4)pompa wstępna (eVLP),
5)czujnik kąta obrotu koła kierownicy, 6)pompa hamulcowa.
Zalety ESP:
Zwiększenie przedziałów wartości parametrów ruchu, w których pojazd zachowuje sterowność.
Brak konieczności korygowania kursu samochodu kierownicą czasie poślizgu.
Zwiększenie stateczności samochodu
Poprawa skuteczności hamowania
Zdecydowana poprawa bezpieczeństwa czynnego.
Wady ESP:
Złożoność układu, a zatem i wysoka cena
Ingerencja w układ hamulcowy, powodująca obawy co do niezawodności jego działania.
Aby choć częściowo to skompensować przyjęto, że ESP jest automatycznie wyłączany w przypadku awarii
jakiegokolwiek elementu, którego działanie nie jest powiązane z innymi układami. Jeżeli np. awarii ulegnie
czujnik przyspieszenia bocznego to nadal sprawność zachowują systemy ABS i ASR.
23. OMÓWIĆ INNE SYSTEMY WSPOMAGANIA PRACY KIEROWCY
1. BA/BAS – Brake Assistant (asystent hamowania)
Zalety systemu BAS:
Skrócenie drogi hamowania awaryjnego, nawet o 35% (przy hamowaniu z prędkości 100km/h, długość drogi
wynosi 70m, z zastosowaniem system BAS: dla kierowców testowych skrócenie drogi wynosiło 4-6m, dla
przeciętnych kierowców nawet 20-30m).
Wady systemu BAS:
Możliwość nieuzasadnione włączenia układu w sytuacji, kiedy kierowca chce tylko trochę (niezbyt mocno,
ale szybko) przyhamować.
2. EBV/EBD – elektroniczny rozdział siły hamowania, zwany czasem elektronicznym korektorem sił hamowania.
Zalety EBV:
Większa skuteczność hamowania
Optymalna stateczność ruchu we wszystkich stanach załadowania pojazdu, przy każdej sile bocznej i dla
każdego typu układu napędowego (sprzęgło włączone lub wyłączone, automatyczna skrzynka biegów)
Brak konwencjonalnych korektorów i ograniczników siły hamowania
Zmniejszenie obciążenia termicznego hamulców kół przednich
Równomierniejsze zużycie okładzin ciernych hamulców tylnych i przednich.
3. Tempomat – system utrzymania stałej prędkości jazdy ( również pod nazwą CCS – Cruising Control System).
4. ICC – Intelligent Cruise Control I pochodne systemy kontroli trakcji; sterowanie jazdą w kolumnie. Również pod
nazwą: AICC – Autonomous Intelligent Cruise Control, ACC – Adaptive Cruise Control, DTR – Distronic,
Speedtronic.
5. Stop&Go integruje się z ICC Tempomatem I ESP. 1) Rozpoznaje ruch poprzednika i automatycznie inicjuje ruch
samochodu. 2)Rozpoznaje zatrzymanie się poprzednika i inicjuje hamowanie samochodu oraz zatrzymuje
samochód w odpowiedniej odległości.
6. LGS – Lane Guide Systems – system utrzymania pasa ruchu ( również pod nazwą LDWA).
7. LCA – asystent zmiany pasa ruchu. Jest rozwinięciem systemu LGS. Wymaga zastosowania dodatkowych
sensorów rozpoznawania otoczenia. Zakłada się potrzebę obserwowania sąsiedniego pasa ruchu na odległości +/-
150m.
8. PA – Park Assistent – asystent parkowania. Wspomaganie parkowania równoległego: 1)system monitoruje czy
wielkość miejsca jest wystarczajaca 2)pozytywny wynik monitorowania aktywuje system PA 3)system
podpowiada jak wykonać manewr lub samodzielnie wykonuje parkowanie 4)wyświetla informację o
aktywowaniu system PA.

9. NightVision – w BMW – wyświetlane na szybie obraz z kamery na podczerwień. W mercedesie – szyba zostaje
normalna, obraz z kamery wyświetlany na dodatkowym wyświetlaczu.
SYSTEMY W FAZIE BADAŃ
10. CW – collision Warming System – system ostrzegania przed wypadkiem. Obecnie dotyczy to głównie obserwacji
sytuacji przed samochodem. System uruchamia intensywne hamowanie.
11. CA – Collision Avoidance – system zapobiegania wypadkom – w fazie prac studyjnych
12. ARP – Active Rollower Protection – system aktywnego zapobiegania przewracania się samochodu.
13. NV – system wia widzenia w nocy
14. C2C – Car to Car – system komunikowania się między dwoma samochodami
15. C2E – Car to Environment
16. C2I – Car to Infastructure
17. E-Call – automatyczna informacja o wypadku/
18. System nadzorowania czujnością – komputer, kamera, lampa podczerwieni, alarm – nadzoruje oczy kierowcy.
Podsumowanie:
Można uznać, że lista potrzeb (propozycji) jest prawie zamknięta, a więc w najbliższym czasie nie należy
spodziewać się propozycji nowych systemów, a raczej będzie następował proces doskonalenia omawianych
systemów.
Realizowany jest proces integracji systemów np.: ABS+ASR+BA+ESP, także
ICC+Stop&Go+Tempomat+ESP i inne
Rozwijane będą systemy rozpoznawania otoczenia. Rozwój tych systemów może się stać barierą rozwoju
innych systemów asystenckich.
Powstają koncepcje systemów zapobiegania wypadkom – Pre-save i Pre-crash.
Dyrektywa Unii Europejskiej: od 29.10.2011 nowe pojazdy wszystkich kategorii muszą być wyposażone w system
ESP. Od 10.10.2012 duże samochody ciężarowe ( z nieobligatoryjnym zaleceniem dla innych samochodów) oraz
system wspomagania nagłego hamowania (EBA,BAS,BA) a także system utrzymania pasa ruchu (LDWS,LGS,HC).
24. WŁASNOŚCI SAMOCHODU I URZĄDZENIA MAJĄCE WPŁYW NA BEZPIECZEŃSTWO BIERNE
SAMOCHODU
BEZPIECZEŃSTWO BIERNE SAMOCHODU dzielimy na:
1. Bezpieczeństwo bierne wewnętrzne – ma na celu zmniejszenie prawdopodobieństwa zranienia lub śmierci
kierowcy i pasażerów pojazdu.
Własności samochodu i urządzenia mające wpływ na bezpieczeństwo bierne wew.:
Odpowiednia konstrukcja nadwozia, zapewniająca pochłanianie energii dzięki zastosowaniu tzw. stref
kontrolowanego zgniotu oraz odpowiednia sztywność kabiny – tzw. strefa przeżycia.
Pasy bezpieczeństwa i ich napinacze
Poduszki i kurtyny gazowe
Zagłówki
Specjalne foteliki i pasy bezpieczeństwa dla dzieci.
Odpowiednie umieszczenie zespołów mogących stanowić zagrożenia (zbiornik paliwa, akumulator)
Zastosowanie bezpiecznych szyb
Bezpiecznie ukształtowanie wnętrza samochodu
Bezpiecznie ( odkształcalne) kolumny i koła kierownicze)
Stosowanie zabezpieczeń przed dostawaniem się ładunku z przestrzeni ładunkowej lub bagażnikowej do
przestrzeni pasażerskiej.
2. Bezpieczeństwo bierne zewnętrzne
Własności samochodu i urządzenia mające wpływ na bezpieczeństwo bierne zew.:
Ukształtowanie nadwozia (w tym zderzaka) tak, aby zmniejszać szkodliwe skutki uderzenia pieszego lub
kierowcy jednośladów
Nowoczesne urządzenia ochrony pieszych
Zderzaki i osłony boczne w samochodach ciężarowych.
25. KSZTAŁTOWANIE NADWOZIA SAMOCHODU Z PUNKTU WIDZENIA BEZPIECZEŃSTWA
BIERNEGO
26. Pasy bezpieczeństwa : Aktywne i pasywne, statyczne i bezwładnościowe; 2-punktowe: biodrowy i barkowy, 3-
punktowe: barkowo biodrowy ,4- punktowe (szelkowe i krzyżakowe), 5- punktowe
Przebieg zderzenia w przypadku pasa zapiętego
27. PODUSZKI GAZOWE – stosowane od lat 70. W samochodach wyróżnia się poduszki dla kierowców, o kształcie
okrągłym (w Europie 25-45l, w USA 60-75l) oraz dla pasażerów, w kształcie prostokąta ( Europa 60-100l, USA
100-150l). Są też kurtyny gazowe – odpalają w przypadku uderzenia bocznego (brak standardów).
Stosuje się również pasy bezpieczeństwa z poduszką gazową dla pasażerów siedzeń tylnich.
Budowa układu z poduszką gazową: 1- układ aktywujący (czujnik opóźnienia w zderzaku), generator gazu(komora
sprężania, paliwo pirotechniczne, kanały dolotowe, zapalnik), poduszka właściwa.
28. BEZPIECZEŃSTWO BIERNE – ZEWNĘTRZNE, koncepcje ochrony pieszych.
- aktywna pokrywa silnika
- aktywna pokrywa silnika i zderzaki
29. Kompatybilność pojazdów – jest to cecha zapewniająca jednakowy lub co najmniej zbliżony poziom
bezpieczeństwa kierowców i pasażerów tych pojazdów. Oznacza to, że jeśli dochodzi do zderzenia to skutki tego
faktu w postaci zagrożenia życia lub zdrowia powinny możliwie równomiernie dotyczyć użytkowników obu
uczestniczących w wypadku pojazdów.
1. Efekt różnicy mas – zderzenie dwóch samochodów (ochrona wzajemna – kompatybilność)
2. Efekt różnicy sztywności
3. Postulowane strefy deformacji przodu nadwozia samochodu
a. Strefa ochrony pieszego
b. Strefa kompatybilności – sztywniejsza niż ta pierwsza, ale w miarę miękka ze względu na mniejsze
pojazdy
c. Strefa ochrony własnej (sztywna) – strefa agresywna.
Wyszukiwarka
Podobne podstrony:
Instrukcja obslugi Uchwyt samoc Nieznany
Bezpieczenstwo zakres materialu Nieznany
(A bezpieczenstwo pracy w wybra Nieznany (2)
Bezpieczenstwo surowcowe Europy Nieznany
Bezpieczenstwo pozarowe obiekto Nieznany (2)
bezpieczne protokoly DZGDGX3PHT Nieznany (2)
11 transportid 12256 Nieznany (2)
Bezpieczeństwo transportu samochodowego wykład
Bezpieczenstwo w gorach podst Nieznany (2)
Bezpieczenstwo i higiena pracy Nieznany (2)
Bezpieczenstwo spoleczne wyklad Nieznany (3)
Bezpieczenstwo w sieciach Windo Nieznany
Bezpieczny transport i skladowanie
Bezpieczenstwo uzytkowania masz Nieznany (2)
Bezpieczenstwo i higiena pracy Nieznany (3)
więcej podobnych podstron