
Układ sterujący (część 1)
1
Przedmioty prowadzone w ramach
Programu Rozwoju WSFiZ w Białymstoku realizowane są w ramach
Programu Operacyjnego Kapitał Ludzki, Priorytet IV Szkolnictwo wyższe i nauka, Poddziałanie 4.1.1
Wzmocnienie potencjału dydaktycznego uczelni, współfinansowanego ze środków
Europejskiego Funduszu Społecznego (POKL.04.01.01-00-030/08)
8.
Układ sterujący (część 1)
Spis treści
8.1
Wstęp
Jak to już było powiedziane układ sterujący (US) jest „mózgiem” procesora: potrafi rozpoznać
rozkaz i uruchomić sekwencję kolejnych kroków wykonywanych przez ALU oraz sekwencję
przesłań pomiędzy różnymi rejestrami procesora, która to sekwencja prowadzi do wykonania
wyżej wymienionego rozkazu. Sekwencje takie występują przy realizacji każdej z faz cyklu
rozkazu. Najbardziej rozbudowane są przy realizacji złożonych operacji ALU, takich jak np.
mnożenie czy dzielenie.
Znane są dwie metody realizacji układów sterujących. Pierwsza z nich, nazywana hardware’ową,
polega ma zbudowaniu układu ze standardowych bramek logicznych (docelowo układu VLSI –
ang. very large scale integration) i druga, która realizuje go jako tzw. układ mikroprogramowany.
Metoda pierwsza ze względu na hardware’ową realizację algorytmów sterujących jest szybsza,
ale raz stworzony układ jest praktycznie niezmienialny. Druga - realizuje istotną część
algorytmów sterujących w oparciu tzw. mikroprogram zapamiętany w specjalnie do tego
przeznaczonej pamięci. Jest od tej pierwszej wolniejsza, ale koncepcyjnie bardziej klarowna,
dająca szansę na wprowadzenie zmian w stosunku do wcześniej uruchomionej wersji. Ideę
takiego rozwiązania ogłosili w 1951r. Wilkes i Stringer. Możliwości realizacyjne otworzyły sie
przed nią dopiero po wprowadzeniu układów scalonych LSI (ang. large scale integration,) i
VLSI. Rozdział ten poświęcony jest omówieniu właśnie tej metody jak i realizującego ją układu
(często nazywanego mikrokontrolerem).
8.2
Struktura podstawowa i zasady działania
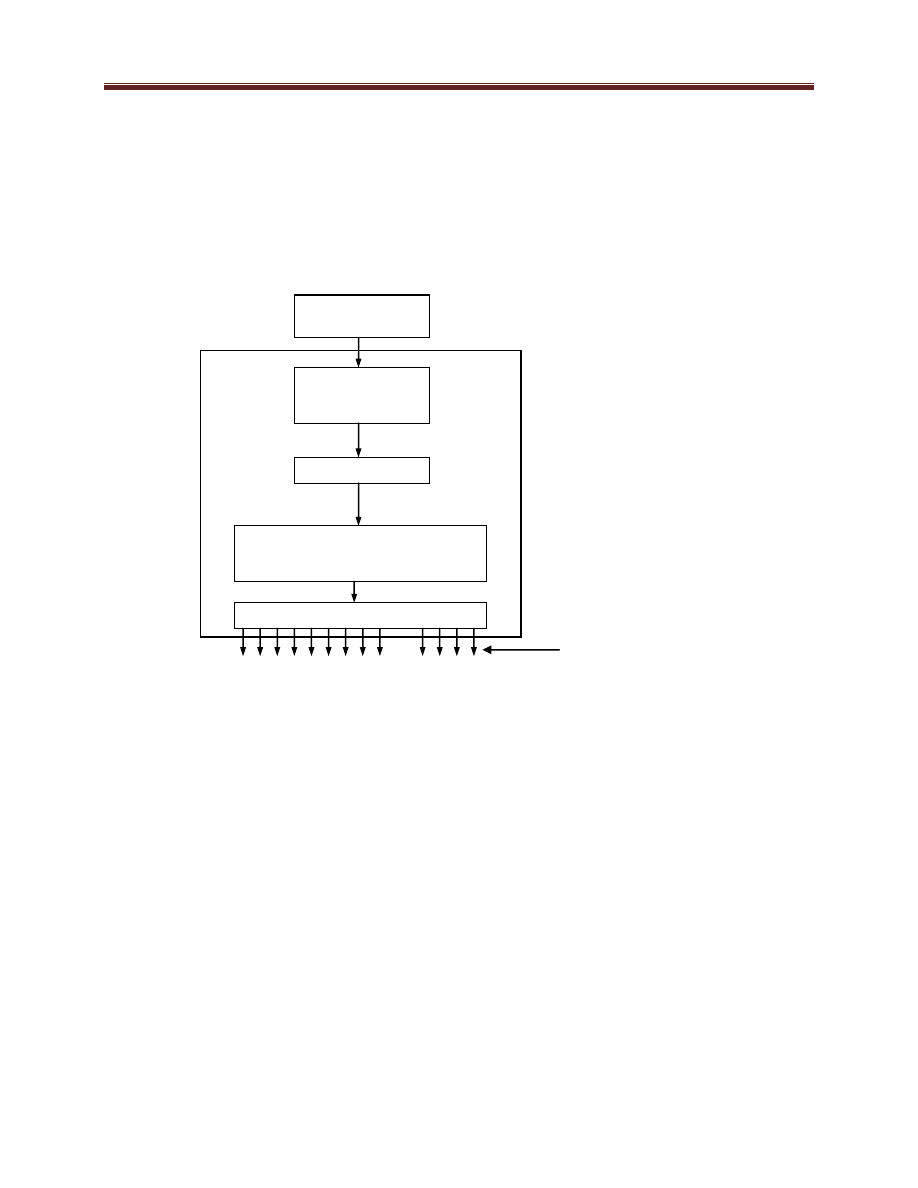
Podstawowa struktura mikroprogramowanego układu sterującego pokazana jest na rysunku 8.1
(patrz niżej).
Przypomina ona nieco (zwłaszcza w działaniu, o czym za chwilę) strukturę procesora. Dla
odróżnienia obu struktur między sobą oraz dla podkreślenia, że w przypadku US chodzi o
strukturę działającą o poziom głębiej (tj. wewnątrz procesora), a w związku z tym w sposób dużo
Układ sterujący (część 1)
2
bardziej elementarny, używa się przedrostka mikro- i to zarówno do niej samej jak i do jej
składowych.
Informacją wejściową dla US jest zawartość rejestru rozkazów, a więc kod realizowanego
rozkazu. Funkcjonalnie pierwszym zadaniem US jest zdekodowanie tego rozkazu, tj. określenie
na podstawie zapisanych w nim wartości bitów sekwencji działań, które ma podjąć procesor. W
przyjętym modelu procesora każde jego elementarne działanie dotyczy albo polecenia przesłania
informacji pomiędzy wskazanymi rejestrami albo zlecenia wykonania określonej operacji przez
ALU lub pamięć.
IR
Generator
Adresów
Początkowych
μPC
Pamięć sterująca
Słowo sterujące
...
sygnały sterujące
Rysunek 8.1. Struktura mikrokontrolera
Ponieważ przesyłanie informacji wewnątrz procesora zachodzi za pośrednictwem jego
wewnętrznej szyny to każde przesłanie między rejestrem Ri a Rj jest w istocie przesłaniem
pomiędzy rejestrem Rj a szyną, a następnie szyną a rejestrem Rj. Wydanie dowolnego z tych
poleceń polega na wygenerowaniu odpowiedniego sygnału sterującego. Liczba wszystkich
sygnałów sterujących jest skończona i silnie zależy od ilości elementów składowych procesora
biorących udział w realizacji rozkazów. Można je zapisywać w słowie pamięci w taki sposób, że
każda czynność będzie związana z bitem o konkretnym, ustalonym numerze. Wartość bitu 1
oznacza konieczność wygenerowania sygnału, 0 oznacza brak takiej konieczności. Ilość bitów w
słowie byłaby równa ilości sygnałów sterujących. Generalnie, jeżeli w takim słowie w danej
chwili występuje k jedynek, to oznacza to konieczność jednoczesnego wygenerowania zestawu
(zbioru) k sygnałów sterujących. Jeżeli chcielibyśmy zapisać sekwencję zbiorów sygnałów
sterujących o określonym następstwie w czasie (tzn. żeby jeden, określony zbiór sygnałów został
wygenerowany przed innym, wskazanym zbiorem sygnałów) to wystarczy ułożyć sekwencję
odpowiadających tym zbiorom słów. Tak rozumiane słowo nazywać będziemy mikrorozkazem, a
sekwencję słów – mikroprogramem.
Jak to widać na rysunku 8.1 (wyżej) w skład układu sterującego wchodzi pamięć (nazywana
pamięcią sterującą albo mikropamięcią), w której zapisane są mikroprogramy realizujące
Układ sterujący (część 1)
3
wszystkie rozkazy z listy rozkazów procesora. Można powiedzieć, że wykonanie rozkazu
oznacza wykonanie odpowiadającego mu mikroprogramu.
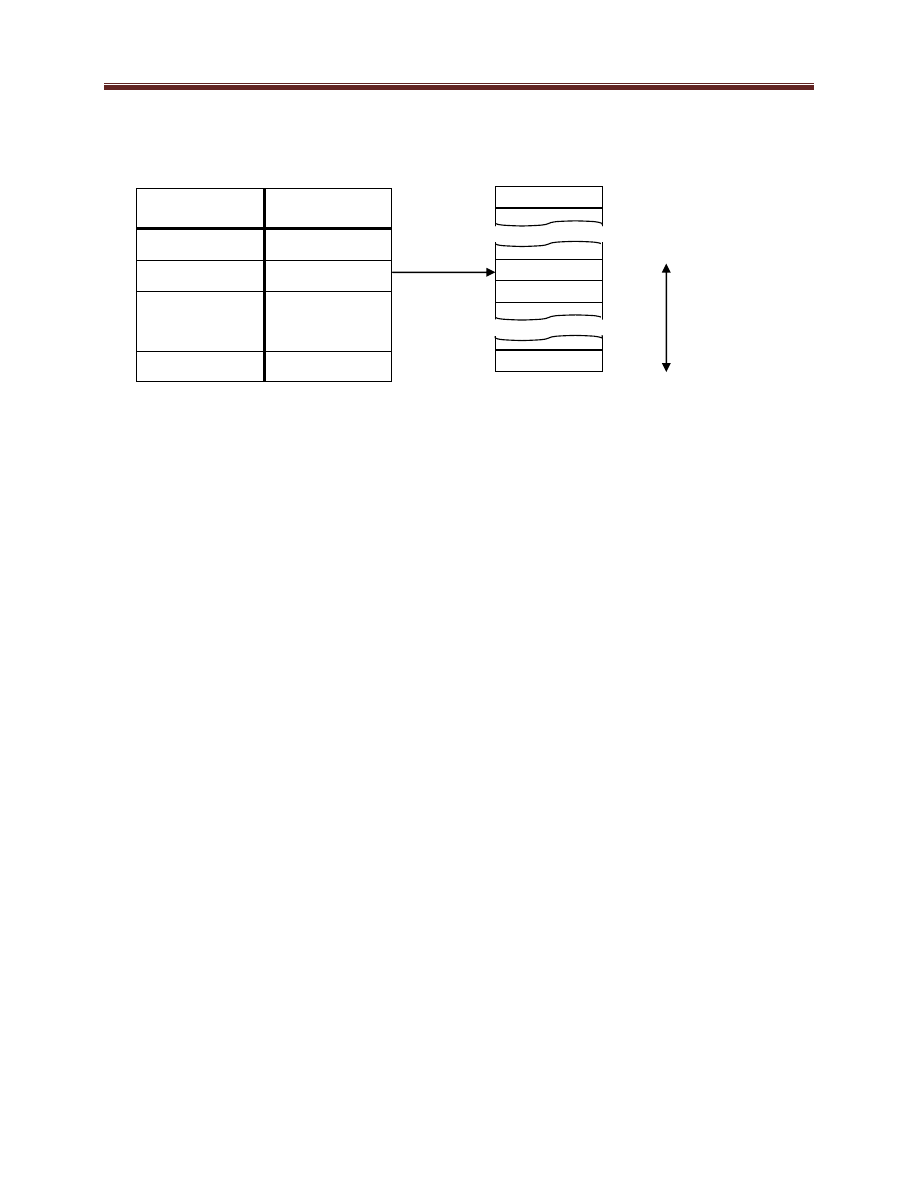
GAP
mikropamięć adresy
0
1
...
215
k mikro-
216
rozkazów
programu
... realizującego
rozkaz o kodzie
215+k C4 (MULL3)
...
Rysunek 8.2. Struktura GAP
Informacje o początkowych adresach każdego z programów zapisane są w bloku Generatora
adresów początkowych (GAP). Blok ten realizuje odwzorowanie: kod r rozkazu procesora →
adres pierwszego mikrorozkazu realizującego rozkaz r (patrz rysunek 8.2 wyżej). Sięganie do
mikropamięci i odczytywanie z niej mikrorozkazów działa analogicznie jak sięganie do pamięci
komputera i odczytywanie z niej rozkazów programu. Tak jak na poziomie procesora
specjalizowany rejestr przechowuje adres następnego rozkazu do wykonania – jest to jak
wiadomo licznik programu (PC), tak na poziomie układu sterującego rolę tą pełni mikrolicznik
programu (μPC). To do niego ładowany jest adres wygenerowany przez GAP. Następnie
realizowane są czynności znane z opisu fazy pobierania rozkazu cyklu rozkazowego procesora.
Na rysunku 8.2 pokazana jest przykładowa lokalizacja w mikropamięci k mikrorozkazów
realizujących rozkaz procesora o kodzie C4. Mikroprogram rozpoczyna się od adresu 215
wyznaczonego przez Generator Adresów Początkowych na podstawie kodu rozkazu. W
podrozdziale 7.8 Przykład założyliśmy, że jest to kod rozkazu MULL3.
Oprócz podobieństw w realizacja rozkazu i mikrorozkazu są również istotne różnice. Po
pierwsze: mikrorozkazy nie mają argumentów, a więc w cyklu realizacji mikrorozkazu brak jest
fazy lub faz pobierania argumentu(ów). Po drugie – faza wykonania rozkazu polega na przesłaniu
zlecenie do ALU. W układzie sterującym odpowiada ona fazie wykonania mikrorozkazu, która
polega na umieszczenie aktualnie wskazywanego przez μPC słowa mikropamięci sterującej w
słowie sterującym (patrz rysunek 8.1 wyżej). Słowo sterujące jest rodzajem rejestru mającego
dokładnie tyle bitów, ile jest w każdym słowie pamięci sterującej. Jest ono w stanie
wygenerować sygnały sterujące z tych pozycji, na których w załadowanym do niego słowie
pamięci są jedynki. Natura tych sygnałów zostanie omówiona w rozdziale 8.2 Sygnały sterujące.
Zapisywanie mikroprogramów w pamięci sterującej stwarza ciekawą możliwość modyfikacji
fragmentów lub całości mikroprogramu przeprowadzonej w celu np. zamiany algorytmu
mnożenia na inny (krótszy, szybszy, generalnie uznany za lepszy). Ponieważ mikropamięć
sterująca jest realizowana najczęściej na pamięciach typu ROM (patrz rozdział 9.2.1.2
Klasyfikacja ze względu na technologię wytwarzania), to możliwość taka jest mocno ograniczona
(przynajmniej dla zwykłych użytkowników). Tym niemniej na poziomie producenta jest całkiem
realne wytwarzać komputery różniące się jedynie zawartością mikropamięci, a więc
kod rozkazu
adres
C4
215
....
....

Układ sterujący (część 1)
4
realizującego instrukcje tego samego procesora inaczej albo realizujące zupełnie inne zestawy
instrukcji.
8.3
Sygnały sterujące
Jak to już było powiedziane sygnały sterujące służą spowodowaniu transferu informacji z
rejestrów na szynę wewnętrzną procesora, z szyny do rejestrów, przesłaniu do ALU informacji o
tym, który z rozkazów ma wykonać bądź przesłaniu do pamięci informacji o żądanej operacji.
Można wyobrażać sobie, że infrastruktura niezbędna do przesyłania tych sygnałów składa się z
bardzo wielu połączeń elektrycznych oplatających wszystkie części składowe procesora. Ze
względu na realizację procesora w technologii VLSI te połączenia realizowane są środkami
adekwatnymi dla tej technologii.
Zajmiemy się nieco bliżej tymi sygnałami. Zaczniemy od połączeń szyna – rejestry. Jest jasne,
że każdy z rejestrów potrzebuje połączeń umożliwiających załadowanie go sygnałami z szyny
oraz niezależnych połączeń umożliwiających wprowadzenie na szynę sygnałów zdefiniowanych
przez bity rejestru. Wyjątkiem jest rejestr adresowy pamięci MAR, którego zawartość jest
wyłącznie ładowana z szyny. Jest również jasne, że jeżeli ładujemy wskazany rejestr, to wejścia
pozostałych rejestrów powinny być w czasie ładowania odcięte od możliwości pobierania
sygnałów z szyny. Podobnie: jeżeli sygnały na szynie mają być ustawione przez stan bitów
wskazanego rejestru, to wyjścia pozostałych rejestrów powinny być w czasie ustawiania odcięte
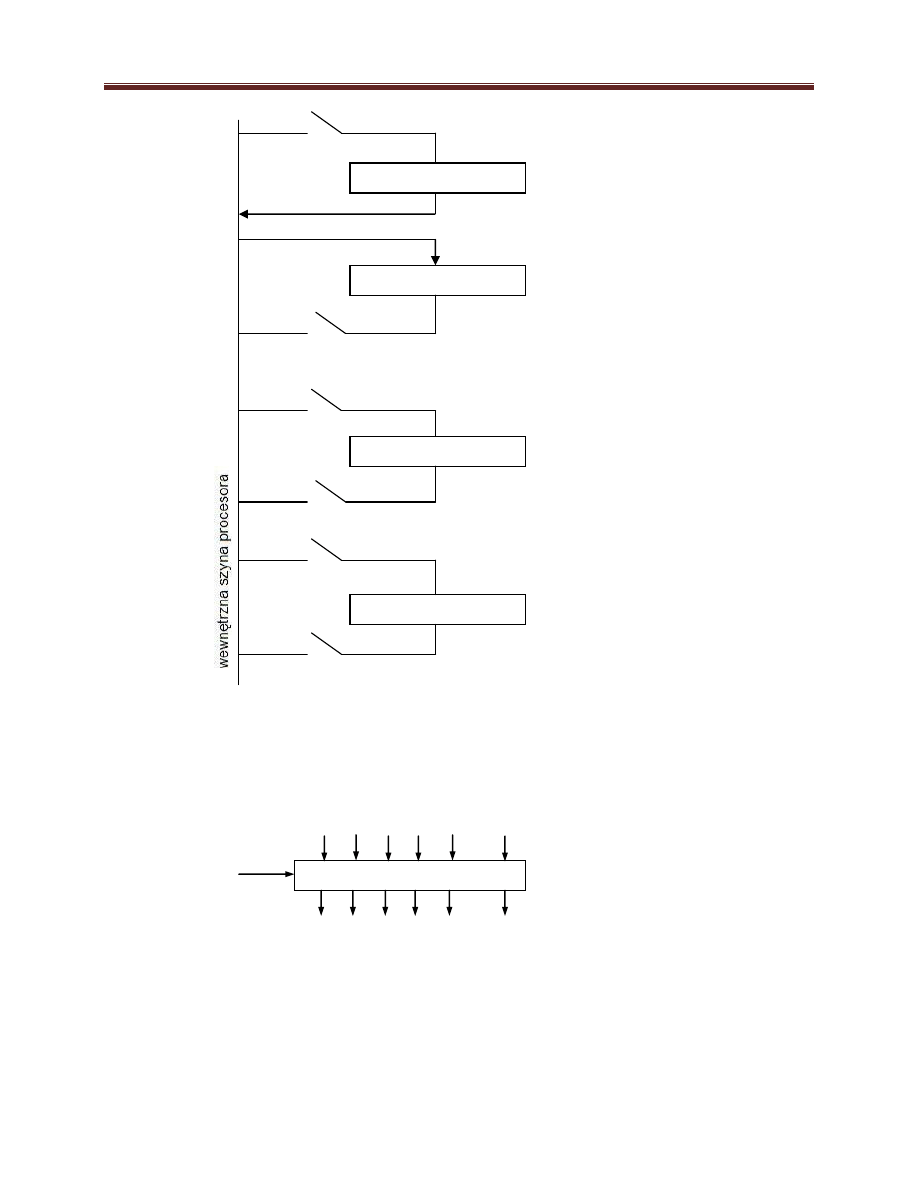
od szyny. Idea przedstawiona jest rysunku 8.3 (patrz niżej), na którym przez Ri
in
oznaczono
przełącznik wejściowy rejestru i, a przez Ri
out
przełącznik wyjściowy rejestru i; i=0, …, 15.
Przedstawia on sytuację, w której rejestr R0 wprowadza sygnały na szynę (
R0
out
zwarte
). Sygnały
te odczytuje z szyny rejestr R1 (
R1
in
zwarte
).
Pozostałe rejestry mają w tym czasie elektrycznie
odcięte od szyny wejścia przez przełączniki wejściowe (Ri
in
rozwarte, i=0,2,3, … ,15), oraz
wyjścia – przez przełączniki wyjściowe (Ri
out
rozwarte, i=1,2,3, … ,15). Pojedyncze linie,
których użyto do przedstawienia szyny procesora oraz jej połączeń z rejestrami należy rozumieć,
jako zestaw n połączeń, gdzie n jest szerokością szyny i jednocześnie ilością bitów w rejestrach.
Rejestry są dostępne na rynku jako układy realizowane w technice MSI (ang. middle scale
integration). Co prawda nasze rejestry są wewnętrznymi rejestrami procesora, ale przyjmijmy, że
mechanizm działania jest w obu przypadkach jednakowy.
Układ sterujący (część 1)
5
R0
in
R0
R0
out
R1
in
R1
R1
out
…
Ri
in
Ri
Ri
out
...
R15
in
R15
R15
out
Rysunek 8.3. Konfiguracja przełączników rejestry – szyna przy transferze R0→R1.
Tak więc rejestry mają ustaloną logikę działania zdeterminowaną przez swoją podstawową
funkcję, tj. zapamiętywania podawanego na ich wejście słowa. Stąd rejestr taki ma n wejść i
wyjść oraz dodatkowe wejście sterujące „ładuj”, którego uaktywnienie (przez podanie sygnału
ładuj = 1) powoduje wpisanie i zatrzaśnięcie w rejestrze aktualnego stanu wejść (patrz rysunek
8.4).
we
1
we
2
we
3
we
4
we
5
we
n
...
ładuj
...
wy
1
wy
2
wy
3
wy
4
wy
5
wy
n
Rysunek 8.4. Funkcjonalny model n-bitowego rejestru.
Wejście „ładuj” może z powodzeniem pełnić rolę sygnału sterującego pracą przełącznika R
in
z
rysunku 8.3 (patrz wyżej). Natomiast przełącznik R
out
należy zrealizować jako dodatkowy układ,
ponieważ logika działania rejestru nie przewiduje istnienia czegoś w rodzaju funkcji:
„wyprowadź zapamiętane sygnały na wyjście” – w każdym standardowym rejestrze są one
dostępne na wyjściach w każdej chwili.
Układ sterujący (część 1)
6
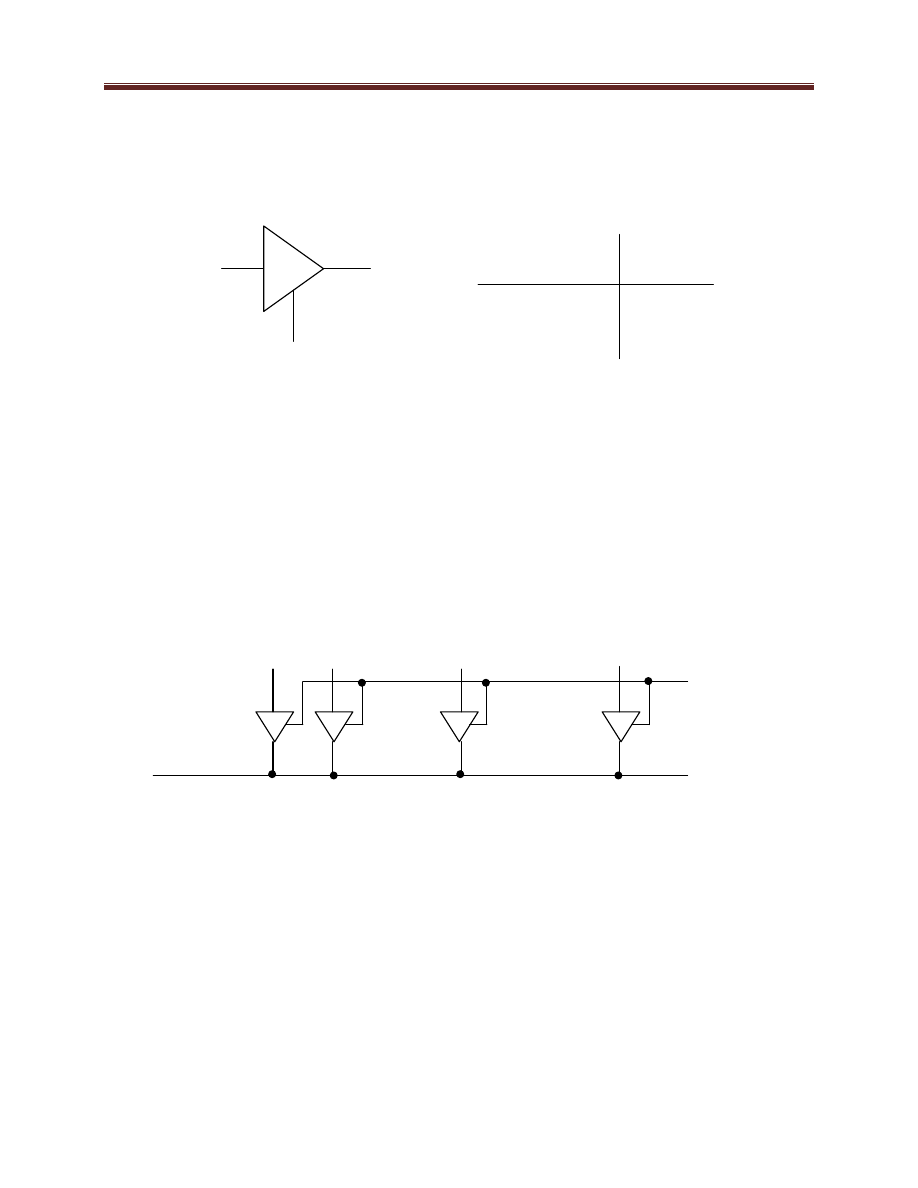
Istnieje specjalny rodzaj bramek, nazywanych bramkami 3-stanowymi albo układami 3-
stanowymi, skonstruowany dokładnie w celu realizacji sterowania elektryczną separacją
(odcięciem) wyjścia z jednego i wejścia do dowolnego, innego układu. Schemat takiej bramki i
tabelę definiującą jej działanie pokazano na rysunku 8.5.
Wejście
Wyjście
Wejście sterujące Wyjście
0
Odcięte
1
Wejście
Wejście
sterujące
Rysunek 8.5. Schemat układu 3-stanowego i tabela definiująca jego działanie.
Jak wynika z tabeli działania bramki 3-stanowej jeżeli na jej wejście sterujące podamy sygnał
zero, to odcinamy wejście od wyjścia. Oznacza to nie tylko, że przy sterowaniu równym 0 żadne
zmiany na wejściu nie przedostają się na wyjście ale przede wszystkim to, że z punktu widzenia
układu, do którego wejścia podłączono wyjście bramki 3-stanowej wspomniane podłączenie nie
istnieje.
Natomiast przy sterowaniu równym 1 wyjście bramki jest równe jego wejściu, czyli sygnały
wejściowe, jakie by nie były ich wartości (u nas 0 albo 1), przedostają się na wyjście. Na rysunku
8.6 (patrz niżej) pokazano sposób zainstalowania bramek 3-stanowych pomiędzy szyną procesora
a wyjściami rejestru. Wejścia sterujące wszystkich bramek są zwarte i sygnał podawany na nie
pełni rolę sygnału sterującego pracą przełącznika R
out
z rysunku 8.3 (patrz wyżej).
Wyjścia z rejestru: wy
1
wy
2
... wy
i
...
wy
n
R
out
...
...
Szyna wewnętrzna
procesora
Rysunek 8.6. Funkcjonowanie bramek 3-stanowych jako przełącznika
R
out
.
Wniosek, jaki wynika z powyższych rozważań jest taki, że układ sterujący musi przesyłać dwa
niezależne sygnały sterujące na każdy rejestr (poza rejestrem adresowym pamięci MAR, który
wymaga tylko jednego sygnału sterującego) Ri
in
i Ri
out
, gdzie i jest numerem rejestru, i = 0, 1, ... ,
15. Ri
in
jest połączone z wejściem sterującym „ładuj” rejestru Ri, a Ri
out
jest połączone z
wejściem sterującym zbioru bramek 3-stanowych (po n bramek na każdy n-bitowy rejestr), każdy
zbiór w układzie takim, jak na rysunku 8.6. Oznacza to również konieczność pamiętania w
mikrorozkazie wszystkich wymienionych sygnałów sterujących, aby na podstawie wartości
odpowiadającym im bitów słowo sterujące mogło wygenerować wspomniane sygnały.
Układ sterujący (część 1)
7
8.4
Grupowanie sygnałów sterujących
Wnioski postawione na końcu poprzedniego podrozdziału ujawniły jedną z głównych wad
mikroprogramowanej wersji układu sterownia. Jest nią konieczność przeznaczenia 1 bitu słowa
sterującego na każdą mikrooperację. W rezultacie uwzględnienia wszystkich niezbędnych
mikrooperacji liczba bitów w słowie sterującym może sięgnąć 200. Dla przykładu spróbujemy
oszacować tą liczbę dla modelu procesora wprowadzonego w rozdziale 7. Do 32 bitów
przeznaczonych do obsługi rejestrów należy dodać 3 bity do obsługi interakcji z pamięcią
(Czytaj/Pisz/Czekaj na pamięć), 3 kolejne na obsługę rejestrów pamięci (2 dla MDR i 1 dla MAR
– do niego tylko piszemy). Jeżeli skromnie założymy, że nasze ALU wykonuje 16 operacji to tyle
kolejnych bitów należy dołożyć do słowa sterującego. Już ich mamy ponad 50, a przecież nie
zostały uwzględnione bity do obsługi licznika rozkazów PC, rejestru rozkazów IR, czy do
obsługi, jak dotychczas wcale nierozważanych, urządzeń WE/WY.
Pomysł, który załagodził ten problem polegał na dwu-krokowej procedurze. Pierwszy krok
polegał na wyszukaniu wśród sygnałów sterujących grup takich sygnałów, które się między sobą
wzajemnie wykluczają, co oznacza, że w każdej z takich grup w danej chwili może wystąpić
tylko jeden sygnał. Załóżmy, ze taka grupa istnieje i że liczy n sygnałów. Zamiast przechowywać
n sygnałów można przechowywać tylko liczbę k, która jest tak dobrana aby n = 2
k
. Znając k
można wyliczyć na podstawie podanej zależności n i wygenerować na linii o tym numerze sygnał
1. To, czego potrzebujemy to układ przekształcający k w n. Powyższe przekształcenie byłoby
krokiem numer 2 wspomnianej wcześniej procedury.
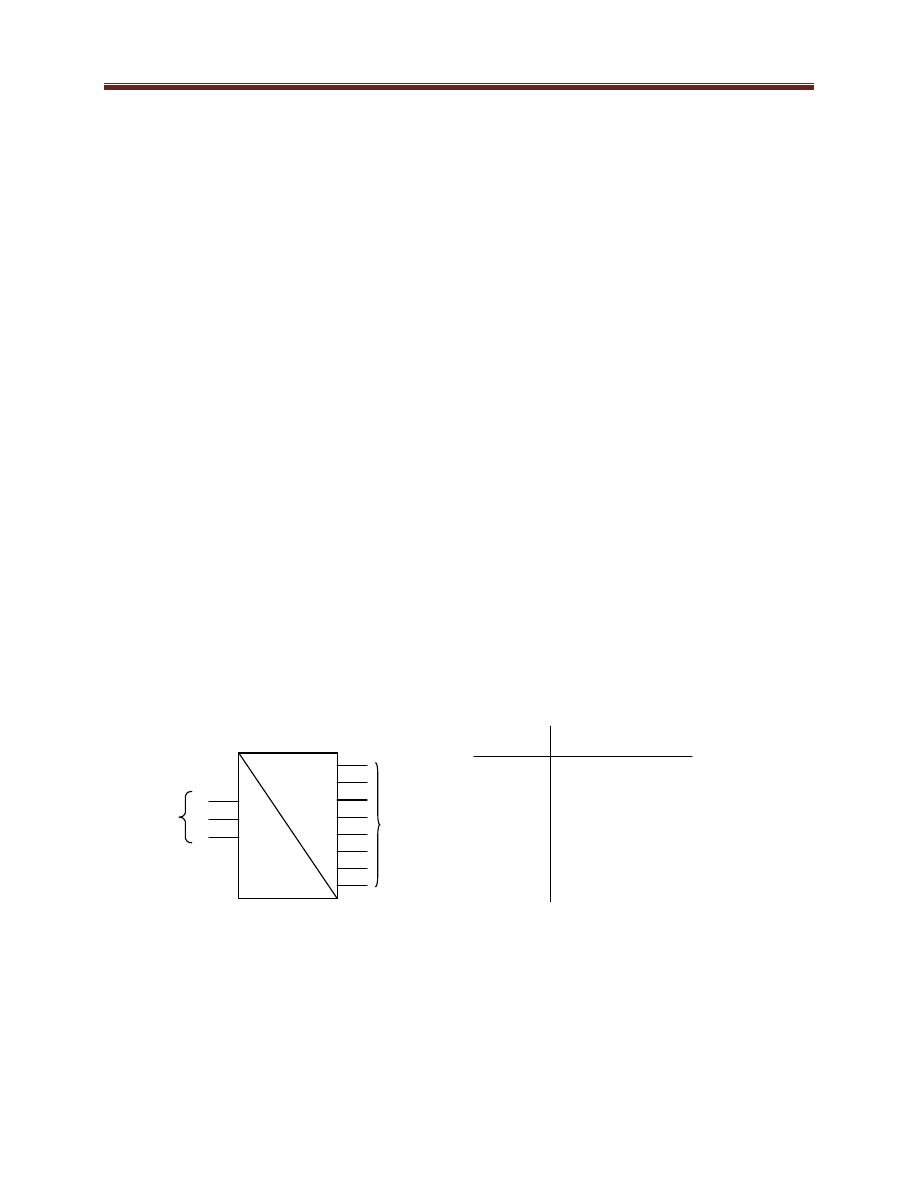
Okazuje się, że wytwarzany w technologii MSI i od dawna oferowany na rynku układ o nazwie
dekoder ma dokładnie pożądane przez nas własności. Jest to układ, który akceptuje na wejściu
zakodowaną binarnie liczbę i wytwarza jedynkę na tym wyjściu (ma ich tyle, ile możliwych do
zakodowania liczb wejściowych), którego numer odpowiada liczbie wejściowej (patrz rysunek
8.7). Jeżeli liczba wejściowa ma k bitów, to wyjść jest 2
k
. Jak widać z tabeli na rysunku 8.7
jedynka pojawia się dokładnie na jednym z nich (tzw. kod 1 z k). Np. jeżeli na wejście podamy
kombinację (101)
2
= 5
10
to jedynka pojawi się na wyjściu numer 4 (nie 5, bo liczymy od 0).
Dekoder będzie oznaczany przekreślonym ukośnie prostokątem,
wejścia
wyjścia
a b c 0 1 2 3 4 5 6 7
0
0 0 0 1 0 0 0 0 0 0 0
1
0 0 1 0 1 0 0 0 0 0 0
a
2
0 1 0 0 0 1 0 0 0 0 0
binarne b Dekoder 3
wyjścia
0 1 1 0 0 0 1 0 0 0 0
wejście c
4
1 0 0 0 0 0 0 1 0 0 0
5
1 0 1 0 0 0 0 0 1 0 0
6
1 1 0 0 0 0 0 0 0 1 0
7
1 1 1 0 0 0 0 0 0 0 1
Rysunek 8.7. Dekoder 3-bitowych liczb kodowanych w NKB.
Pierwszą grupą sygnałów, której liczność możemy w pokazany sposób zredukować są sygnały
przesyłające rozkaz do ALU. Przesyłać nimi będziemy zawsze tylko jeden rozkaz – tak więc
zamiast założonych 16 bitów możemy pamiętać tylko 4 (16 = 2
4
). Drugą taką grupą są sygnały
sterujące rejestrami. Jest ich dla 16 rejestrów 32: 16 do sterowania ich wejściem, a kolejne 16 –
wyjściem. Zauważmy, że przy dowolnych przesłaniach informacji wewnątrz procesora co
najwyżej jeden rejestr może mieć otwarte wyjścia (to z niego informacja trafia na szynę) oraz co
Układ sterujący (część 1)
8
najwyżej jeden może mieć otwarte wejścia (to on ma być załadowany informacją z szyny). Jeżeli
tak, to zakładając, że nie są możliwe bezpośrednie przesłania pomiędzy rejestrami ogólnego
przeznaczenia można numer rejestru zakodować na 4 bitach, a dwa kolejne przeznaczyć na
zapisanie czy z rejestru o podanym numerze czytamy (1 bit), czy też go ładujemy (1 bit). W
sumie zajęliśmy 6 bitów przy 32 na początku. Zysk całkowity wynosi 26 bitów (przy istotnym
założeniu uproszczającym).
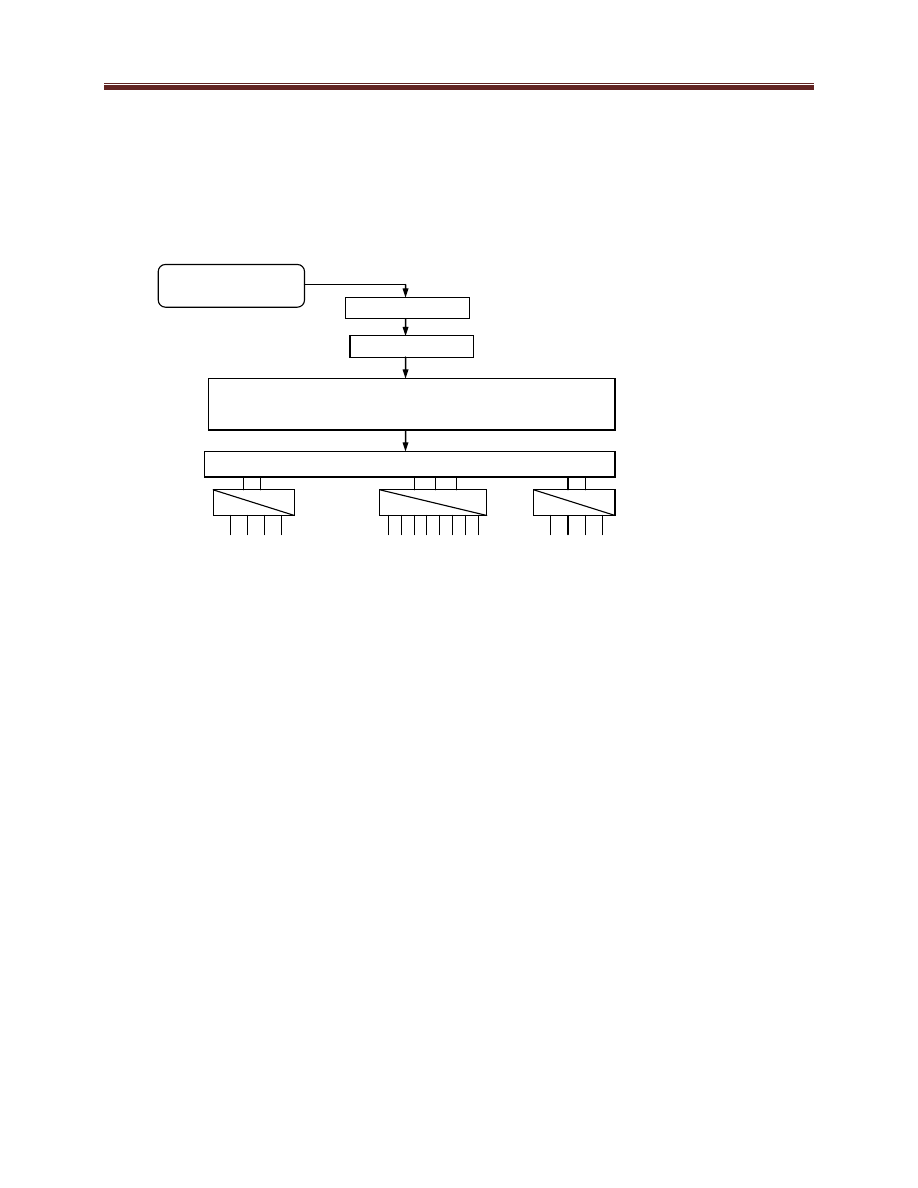
Rozkaz pobrany
z rejestru instrukcji
GAP
μPC
Pamięć
sterująca
Słowo sterujące
Dekoder
...
Dekoder
...
Dekoder
Rysunek 8.8. Układ sterujący maszyny mikroprogramowanej pionowo.
O komputerach z procesorami, w których zastosowano kodowanie podobne do opisanego
mówimy, że są maszynami mikroprogramowanymi pionowo (ang. vertical microprogrammed
machines), natomiast jeżeli mikroprogramowany układu sterujący zrealizowano bez kodowania –
to takie komputery nazywamy maszynami mikroprogramowanymi poziomo (ang. horizontal
microprogrammed machines). Ogólny schemat mikrokontrolera dla tych pierwszych jest
pokazany na rysunku 8.8 (patrz wyżej).
W praktyce stosowane są rozwiązania mieszane. Co do wydajności, to szybsze są procesory z
architekturą poziomą (sygnały mają mniej poziomów bramek do przejścia), które umożliwiają
ponadto współbieżne wykorzystywanie zasobów procesora. Są jednak (ze względu na długość
słowa) droższe od rozwiązań z architekturami pionowymi.
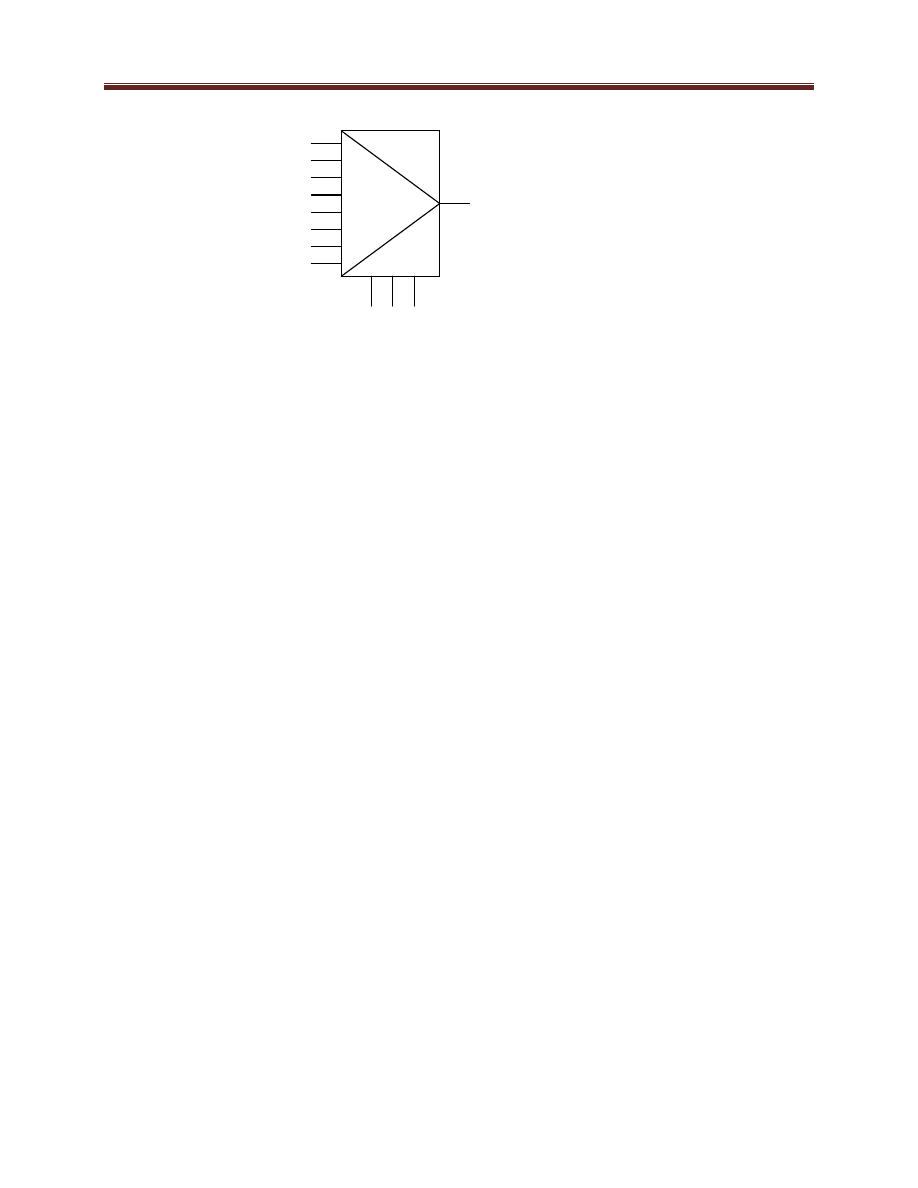
Przy tej okazji wprowadzenia niezwykle użytecznego (i to nie tylko w opisanym kontekście)
układu jakim jest dekoder, wprowadzimy jeszcze jeden układ pomocniczy nazywany
multiplekserem. Jest to układ, tak jak dekoder, wytwarzany w technologii MSI i również jak on
od dawna oferowany na rynku. Multiplekser realizuje funkcję wybierania jednego z wielu wejść.
Przekazuje on sygnał z wybranego wejścia na wyjście. Dokładnie: ma on n ponumerowanych
kolejno wejść sygnałowych i jedno wyjście. Ponadto ma k wejść sterujących (n = 2
k
), na które
można podać zakodowany binarnie numer wybranego wejścia sygnałowego. Podanie na te
wejścia kodu liczby i oznacza, że sygnał z wejścia o numerze i pojawi się na wyjściu
miltipleksera. Jednocześnie sygnały z pozostałych wejść będą elektrycznie odcięte od wyjścia
(patrz rysunek 8.9 niżej). Np. jeżeli sekwencja bitów sterujących s
2
s
1
s
0
= (110)
2
= 6
10
to y =
x
6
.
Układ sterujący (część 1)
9
x
0
x
1
x
2
x
3
y
x
4
x
5
x
6
x
7
s
2
s
1
s
0
Rysunek 8.9. Multiplekser o 8 wejściach sygnałowych i 3 wejściach sterujących.
Podana definicja i przykładowy miltiplekser z rysunku 8.9 odnoszą się do wyboru dokładnie
jednego z wejść. W praktyce często zachodzi konieczność wyboru grupy wejść. Np. można
rozważać sytuację wyboru jednego 32-bitowego słowa z 8 słów podanych na wejście. Taki
„słowowy” selektor ma wtedy 8*32 sygnały wejściowe i 32 sygnały wyjściowe, ale tylko 3
wejścia wybierające. Multipleksery wykorzystamy w kolejnych podrozdziałach.
Document Outline
Wyszukiwarka
Podobne podstrony:
8w Uklad sterowania 2 v04
8w Uklad sterowania 2 v04
Instrukcja do zad proj 13 Uklad sterowania schodow ruchom
Instrukcja do zad proj 19 Układ sterowania bramy garażu
Układ sterowania
Elementy bez-oczowe w elektronice- Czyli gawrych (Âci-ga), Ściągi do szkoły, Układ Sterowania i Regu
03 uklad sterowania magistrale i organizacja pamieci
Instrukcja do zad proj 17 Uklad sterowania prasy hydrauli
Jody polprzewodnikowe-sciaga, Ściągi do szkoły, Układ Sterowania i Regulacji
Układ sterowania fazowego na mikroprocesorze, elektro, 1, Podstawy Techniki Mikroprocesorowej
Gawrych2, Ściągi do szkoły, Układ Sterowania i Regulacji
Tyrystorowy układ sterownika 1 fazowego
Instrukcja do zad proj 13 Uklad sterowania schodow ruchom
Instrukcja do zad proj 19 Układ sterowania bramy garażu
Sekwencyjny układ sterowania wy¶wietlaczami LED
1997 09 Układ sterowania oświetleniem kabiny samochodu
więcej podobnych podstron