Regulator rozmyty
Ireneusz Dominik KAP AGH
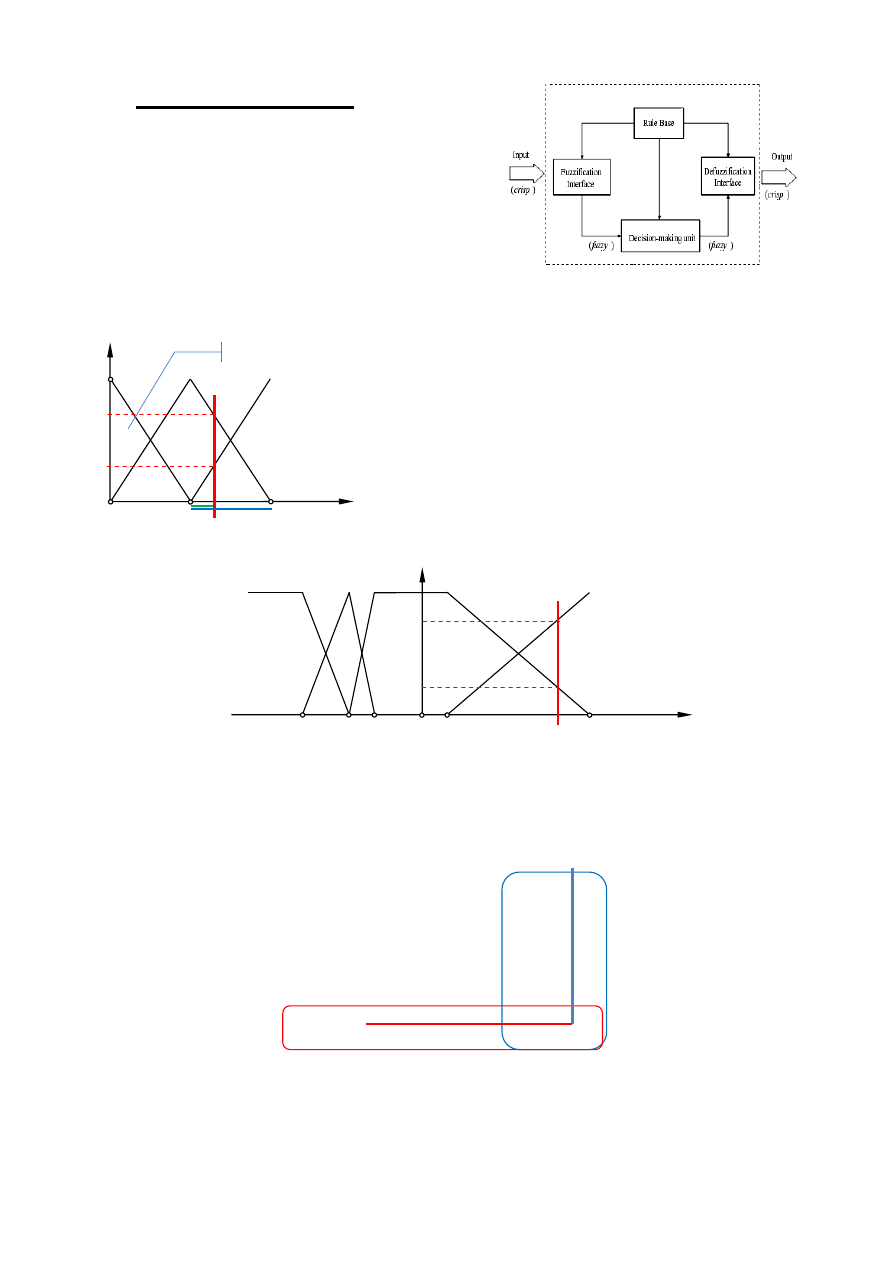
Rys. 1. Regulator rozmyty
a)
fuzzyfikacja
Rys.2. Rozkład funkcji przynależności dla1-go wejścia SV
ZawWE:
2,5
– 2 =
0,5
SzerPrzedz: 4-2=
2
Przyn_SV[0] =2,5mm in FP niska: 1-(
0,5
/
2
)=3/4
Przyn_SV[1] =2,5mm in FP srednia: 1-3/4=1/4
Rys.2. Rozkład funkcji przynależności dla 2-go wejścia e
b) wyliczanie wartości wyjściowej dla danych: SV =
2,5
[mm], PV= 1,8 [mm], obliczone e =
0,7
[mm],
output MV=?
Fig. 4. Baza reguł
MV = ¾ *1/7*50 + ¾*6/7*60 + ¼*1/7* 80 + ¼*6/7*85 =
3/28*50 + 18/28*60 + 1/28*80 + 6/28*85 = 65 [A]
-0
.5
(A
) D
uz
y_
m
-
- 0
.3
(B
) M
aly
_m
-0
.2÷
0.1
(C
) z
er
o
0.8
(D
) M
aly
_p
(1) 0
!"#$% (2) 2
# &!"% (3) 4
(
10
15
20
25
30
40
50
60
70
75
80
85
+
u (e)
1
- 0.5
Duzy_m
(A)
- 0.3 - 0.2
0.1
0.8
0
0
Maly_m
(B)
zero
(C)
Maly_p
(D)
[mm]
0,7
6/7
1/7
0
2 4
niska (2)
u (SV)
1
zero (1)
[mm]
2,5
srednia (3)
3/4
1/4
error e
se
t
v
a
lu
e
S
V

(* Wprowadzanie parametrow bazy reguł *)
(*
X := 0;*)
Sing[0] := 10;
Sing[1] := 30;
Sing[2] := 70;
(*
X := 1;*)
Sing[3] := 15;
Sing[4] := 40;
Sing[5] := 75;
(*
X := 2;*)
Sing[6] := 20;
Sing[7] := 50;
Sing[8] := 80;
(*
X := 3;*)
Sing[9] := 25;
Sing[10] := 60;
Sing[11] := 85;
(* Położenie granic FP dla wybranych wejść*)
(* Granice FP dla wejścia 1 - dla uchybu*)
We[0] := e_Duzy_m; (* A -0,5*)
We[1] := e_Maly_m; (* B -0,3*)
We[2] := e_Zero_m; (* C -0,2*)
We[3] := e_Zero_p; (* C 0,1*)
We[4] := e_Maly_p; (* D 0,8*)
(* Granice FP dla wejścia 2 - dla wartości zadanej*)
We[5] := INT_TO_REAL(SV_Zero); (* 1 +0*)
We[6] := INT_TO_REAL(SV_Niska); (* 2 +2*)
We[7] := INT_TO_REAL(SV_Srednia); (* 3 +4*)
(* Rozmywanie e *)
if e > We[0] then
if e < We[1] then
ZawWE := e - We[0];
SzerPrzedz := We[1] - We[0];
Przyn_e[1] := ZawWE / SzerPrzedz;
Przyn_e[0] := 1,0 - Przyn_e[1];
X := 0;

elsif e < We[2] then
ZawWE := e - We[1];
SzerPrzedz := We[2] - We[1];
Przyn_e[1] := ZawWE / SzerPrzedz;
Przyn_e[0] := 1,0 - Przyn_e[1];
X := 1;
elsif e <= We[3] then
Przyn_e[0] := 1,0;
Przyn_e[1] := 0,0;
X := 2;
elsif e < We[4] then
ZawWE := e - We[3];
SzerPrzedz := We[4] - We[3];
Przyn_e[1] := ZawWE / SzerPrzedz;
Przyn_e[0] := 1,0 - Przyn_e[1];
X := 2;
else
Przyn_e[0] := 1,0;
Przyn_e[1] := 0,0;
X := 3;
end_if;
else
Przyn_e[0] := 1,0;
Przyn_e[1] := 0,0;
X := 0;
end_if;
(* Rozmywanie SV *)
if SV > We[5] then
if SV < We[6] then
ZawWE := SV - We[5];
SzerPrzedz := We[6] - We[5];
Przyn_SV[1] := ZawWE / SzerPrzedz;
Przyn_SV[0] := 1,0 - Przyn_SV[1];
Y := 0;
elsif SV < We[7] then
ZawWE := SV - We[6];
SzerPrzedz := We[7] - We[6];
Przyn_SV[1] := ZawWE / SzerPrzedz;

Przyn_SV[0] := 1,0 - Przyn_SV[1];
Y := 1;
else
Przyn_SV[1] := 0,0;
Przyn_SV[0] := 1,0;
Y := 2;
end_if;
else
Przyn_SV[0] := 1,0;
Przyn_SV[1] := 0,0;
Y := 0;
end_if;
(* Wnioskowanie i wyostrzanie (wyznaczanie wartości wyjściowej *)
out := Przyn_e[0] * Przyn_SV[0] * INT_TO_REAL(Sing[Y + 3 * X])
+ Przyn_e[0] * Przyn_SV[1] * INT_TO_REAL(Sing[Y + 1 + 3 * X])
+ Przyn_e[1] * Przyn_SV[0] * INT_TO_REAL(Sing[Y + 3* (X + 1)])
+ Przyn_e[1] * Przyn_SV[1] * INT_TO_REAL(Sing[Y + 1 + 3 * (X + 1)]);
Wyszukiwarka
Podobne podstrony:
Fuzzy controller
AI fuzzy controller pl
Adaptive fuzzy control for uninterruptible power supply with three phase PWM inverter
Adaptive fuzzy control for uninterruptible power supply with three phase PWM inverter
evolving fuzzy rule based controllers using genetik
Damage Control Plan
14 Controllingid 15298 ppt
13 GEP fuzzy
Controlling w przedsiębiorstwie
overview simatic controllers 04 2007 en plc
Control System Toolbox
control el heater pl
instrumenty Controllingu - praca zaliczeniowa (7 str), Zarządzanie(1)
rachunkowosc zarzadcza i controlling w 7
~$O Fire Control Symbols Regulations
Controlling ćw 14 10 27
więcej podobnych podstron