
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
1
12.
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
12.1. Wstęp
Dynamika jest działem mechaniki zajmującym się układami odkształcalnymi będącymi w ruchu, w
których uwzględniamy wpływ działających sił. Przy rozpatrywaniu zagadnień dynamicznych zakładamy, że
przemieszczenia są bardzo małe i charakteryzują się zmiennością w czasie. Przemieszczenia te mają charakter
oscylacyjny. W rozważaniach zajmować się będziemy drganiami harmonicznymi.
Kolejnym założeniem jest sposób określenia współczynników uogólnionych. Każde ciało posiada stopnie
swobody dynamicznej, czyli liczbę współczynników uogólnionych, które jednoznacznie określają położenie
ciała w przestrzeni oraz możliwość ruchu.
Aby dobrze zrozumieć zagadnienia dynamiki budowli, należałoby wyjaśnić kilka pojęć:
1. Punkt materialny – to ciało, którego położenie w przestrzeni daje się określić w taki sam sposób, jak
położenie punktu geometrycznego (masa bez wymiarów).
2. Ciało materialne – to układ oddzielnych punktów materialnych lub też zbiór punktów wypełniających daną
część przestrzeni w sposób ciągły. Belka jest traktowana jako zbiór punktów materialnych i ma
nieskończenie wiele stopni swobody dynamicznej. Należy przez to rozumieć, że każdy z punktów belki
ugina się inaczej. Możemy w tym przypadku posłużyć się aproksymacją sprowadzając opis belki do dwóch
końcowych jej punktów.
3. Siła – to działanie wywierane na ciało celem wyprowadzenia go ze stanu spoczynku. Siła jest wielkością
kierunkową, czyli wektorem.
4. Masa – to pewna wielkość, charakteryzująca zachowanie się dynamiczne ciała, niezależna ani od stanu
ruchu, ani też od stanu fizycznego ciała. Masa jest wielkością bezkierunkową, czyli skalarem.
12.2. Zasada d'Alemberta
Na poszczególne punkty układu materialnego działają siły czynne P oraz siły bierne (opory ruchu)
W ;
siły te nadają poszczególnym punktom materialnym o masach m przyspieszenia a . Wprowadzając fikcyjne
siły B=−m⋅a , zwane siłami bezwładności, sprowadzamy zagadnienie układu materialnego będącego w
ruchu do ststycznego zagadnienia równowagi sił. Stan ruchu układu materialnego określamy twierdzeniem:
W każdym położeniu poruszającego się układu materialnego siły bezwładności równoważą się z siłami
zewnętrznymi, o ile siły wewnętrzne nawzajem się znoszą.
PB=0
(12.1)
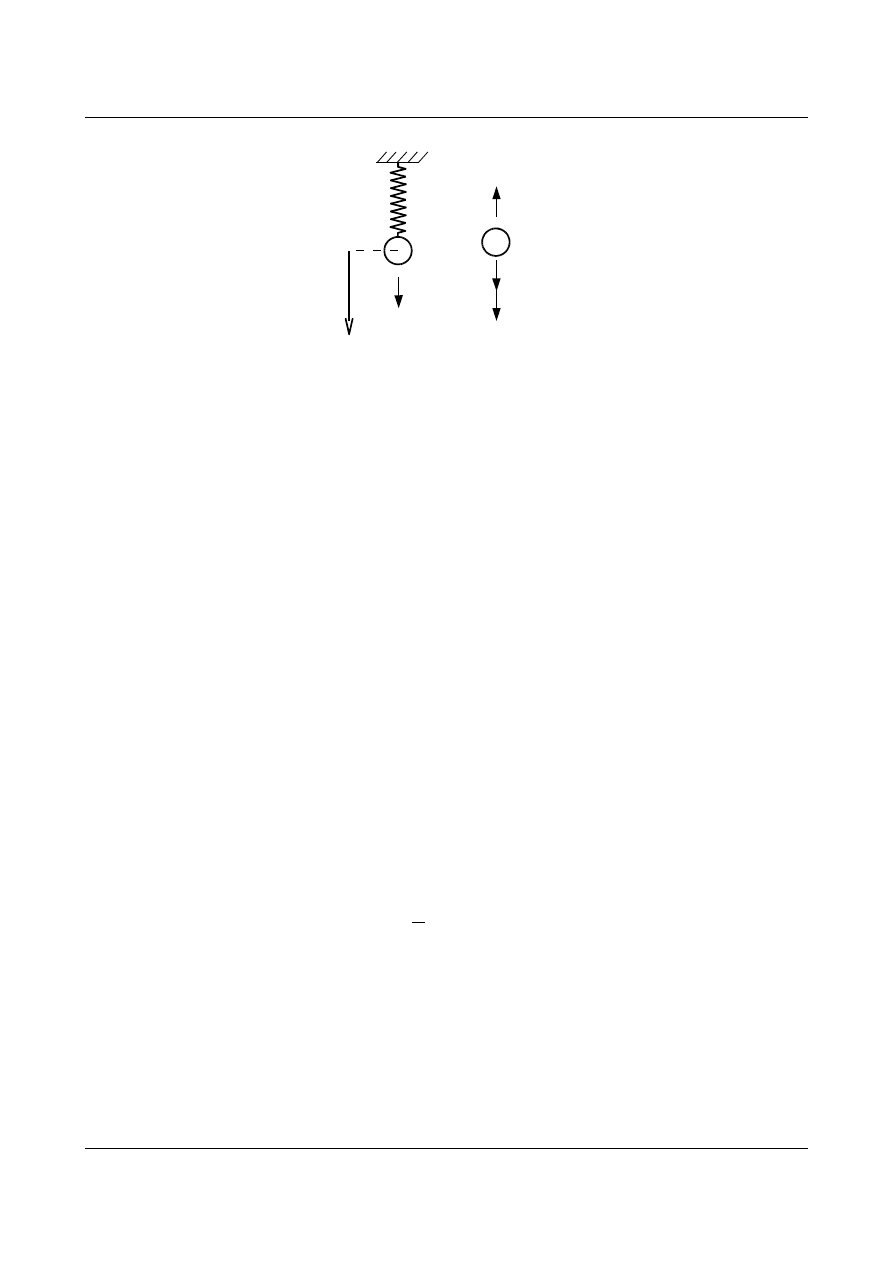
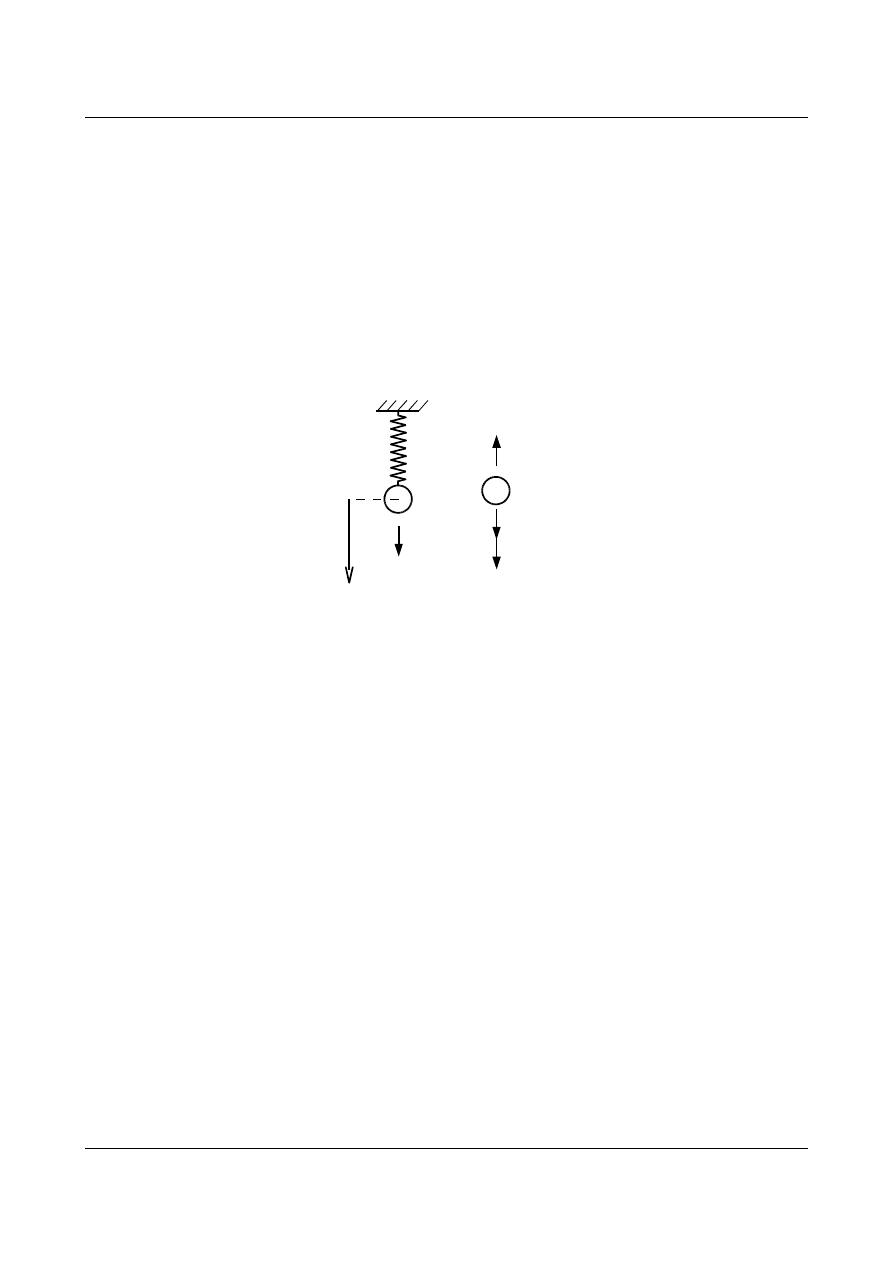
12.3. Drgania własne układu o jednym stopniu swobody dynamicznej
Rozpatrzmy ruch masy
m o jednym stopniu swobody dynamicznej (rys. 12.1), która jest zamocowana
sprężyście (podpora o sztywności
k). Zakładamy możliwość swobodnego ruchu tylko w jednym kierunku.
Wartość przemieszczenia opisuje funkcja czasu
q(t).
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
2
m
q(t)
k [N/m]
P(t)
P(t)
B(t)
m
Q(t)
Rys. 12.1. Układ o jednym stopniu swobody dynamicznej
Zgodnie z zasadą d'Alemberta możemy zapisać równanie równowagi:
P
t
B
t
−Q
t
=0
(12.2)
gdzie siła bezwładności:
B
t
=−m⋅¨q
t
(12.3)
a siła sprężystości:
Q
t
=k⋅q
t
(12.4)
Po podstawieniu wyrażeń (12.3) i (12.4) do równania (12.2), otrzymujemy:
m
⋅¨q
t
k⋅q
t
=P
t
(12.5)
Dla układu, na który nie działa zewnętrzna siła wymuszająca
P
t=0
otrzymujemy równanie jednorodne.
m
⋅¨q
t
k⋅q
t
=0
(12.6)
Równanie (12.6) jest nazywane równaniem różniczkowym zwyczajnym ruchu. Dzieląc to równanie
obustronnie przez masę i podstawiając wyrażenie na częstość kołową drgań własnych
:
2
=
k
m
(12.7)
otrzymujemy:
¨q
t
2
⋅q
t
=0
(12.8)
Równanie różniczkowe (12.8) można wyliczyć przyjmując funkcję rozwiązującą w postaci:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
3
q
t
=C
1
⋅sin tC
2
⋅cos t
(12.9)
lub w innej formie:
q
t
= A⋅sin
t
(12.10)
gdzie
jest przesunięciem fazowym.
Wykorzystując zależności trygonometryczne możemy wyznaczyć relację pomiędzy C
1
i C
2
, a stałymi A
i
.
q
t
=A⋅sin
t
= A⋅
[
sin
t⋅cos cos t⋅sin
]
Przyrównując do siebie wyrażenia (12.9) i (12.10) otrzymujemy:
A
⋅
[
sin
t⋅cos cos t⋅sin
]
=C
1
⋅sin tC
2
⋅cos t
C
1
=A⋅cos
(12.11)
C
2
=A⋅sin
(12.12)
Znając warunki początkowe możemy wyznaczyć wartości stałych równania (12.10). Nie należy mylić
warunków początkowych z warunkami brzegowymi, ponieważ te pierwsze dotyczą czasu, a drugie
przestrzeni. Przykładowo dla chwili początkowej t
=0 :
1) przemieszczenie ma wartość q
0
=a
2) prędkość jest równa ˙q
0
=0
Z warunków tych otrzymujemy:
˙q
0
= A⋅cos
0
=0
cos
=0
=
2
(12.13)
oraz:
q
0
=A⋅sin
0
=a
A
⋅sin =a
A
⋅sin
2
=a
A
=a
(12.14)
Zatem dla powyższych warunków początkowych otrzymujemy pełne rozwiązanie postaci:
q
t
=a⋅sin
t
2
=A⋅cos t
(12.15)
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
4
Zgodnie z rozwiązaniem (12.15) kulka o masie
m zamocowana sprężyście powróci do położenia
początkowego po czasie odpowiadającemu kątowi 2
. Podstawmy zatem tę wartość do równania (12.15).
q
t
= A⋅cos
t2
=A⋅cos
[
t
2
]
=A⋅cos
[
t
T
]
(12.16)
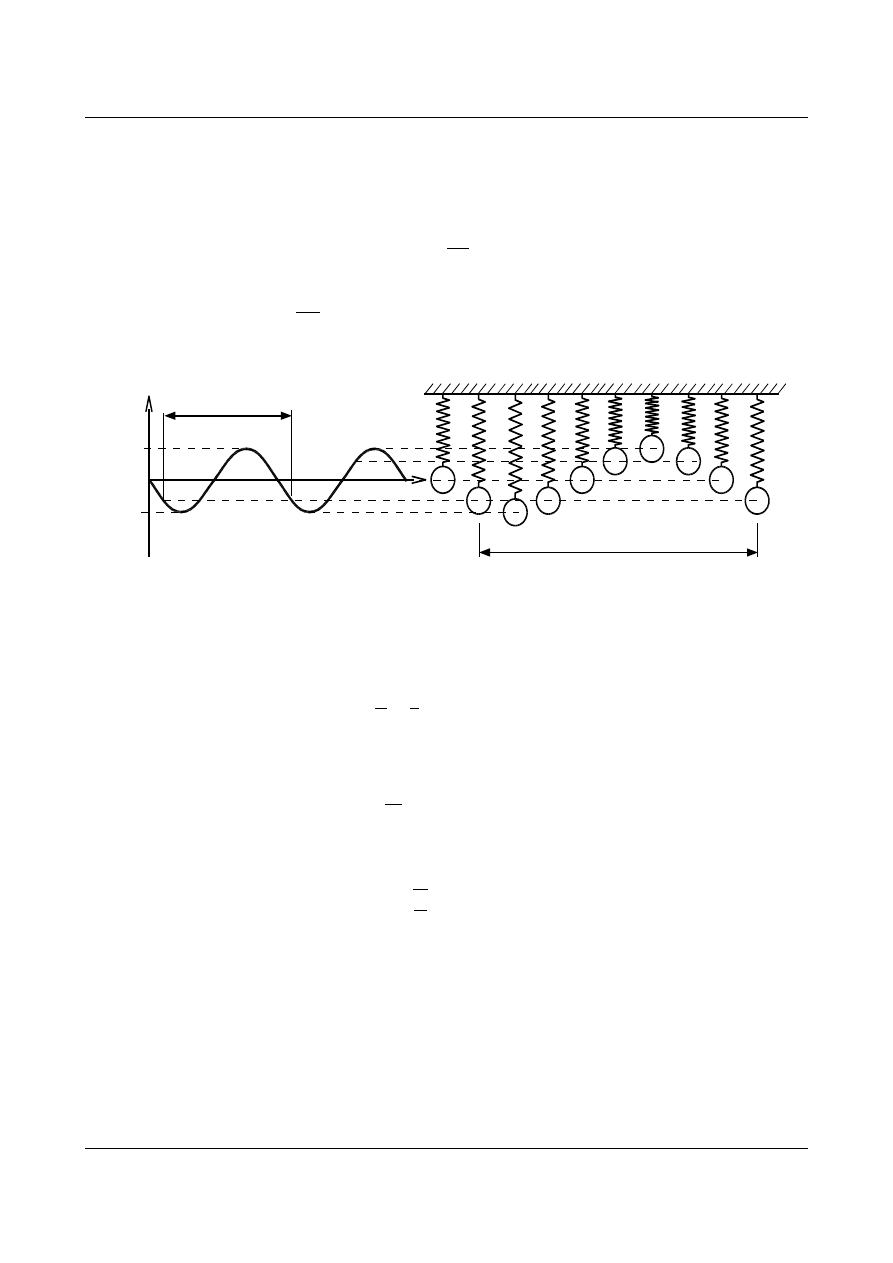
Wprowadzone oznaczenie T
=
2
jest okresem drgań, czyli czasem dzielącym dwa identyczne położenia
rozpatrywanego ciała (rys. 12.2).
q(t)
t
T
k [N/m]
A
A
T
Rys. 12.2. Położenie ciała w zależności od czasu
Mając zdefiniowany okres drgań możemy na jego podstawie określić częstotliwość i częstotliwość techniczną.
1. Częstotliwość (częstość fizyczna) – to ilość pełnych cykli wykonanych w jednostce czasu.
f
=
1
T
[
1
s
=Hz
]
(12.17)
2. Częstotliwość techniczna – to ilość pełnych cykli wykonanych w ciągu jednej minuty.
n
=
60
T
[
Hz
]
(12.18)
Powróćmy jeszcze do wzoru (12.7) na częstość kołową drgań własnych:
=
k
m
gdzie:
k – sztywność [kN/m], jest to siła jaką należy przyłożyć, aby wywołać jednostkowe przemieszczenie,
m – masa [kg].
Oznacza to, że jeśli chcemy poznać częstość kołową drgań własnych konstrukcji, to przy prostych
schematach, przybliżonych jedną masą drgającą wystarczy, że wyznaczymy sztywność konstrukcji. Omówimy
to zagadnienie na kilku przykładach.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
5
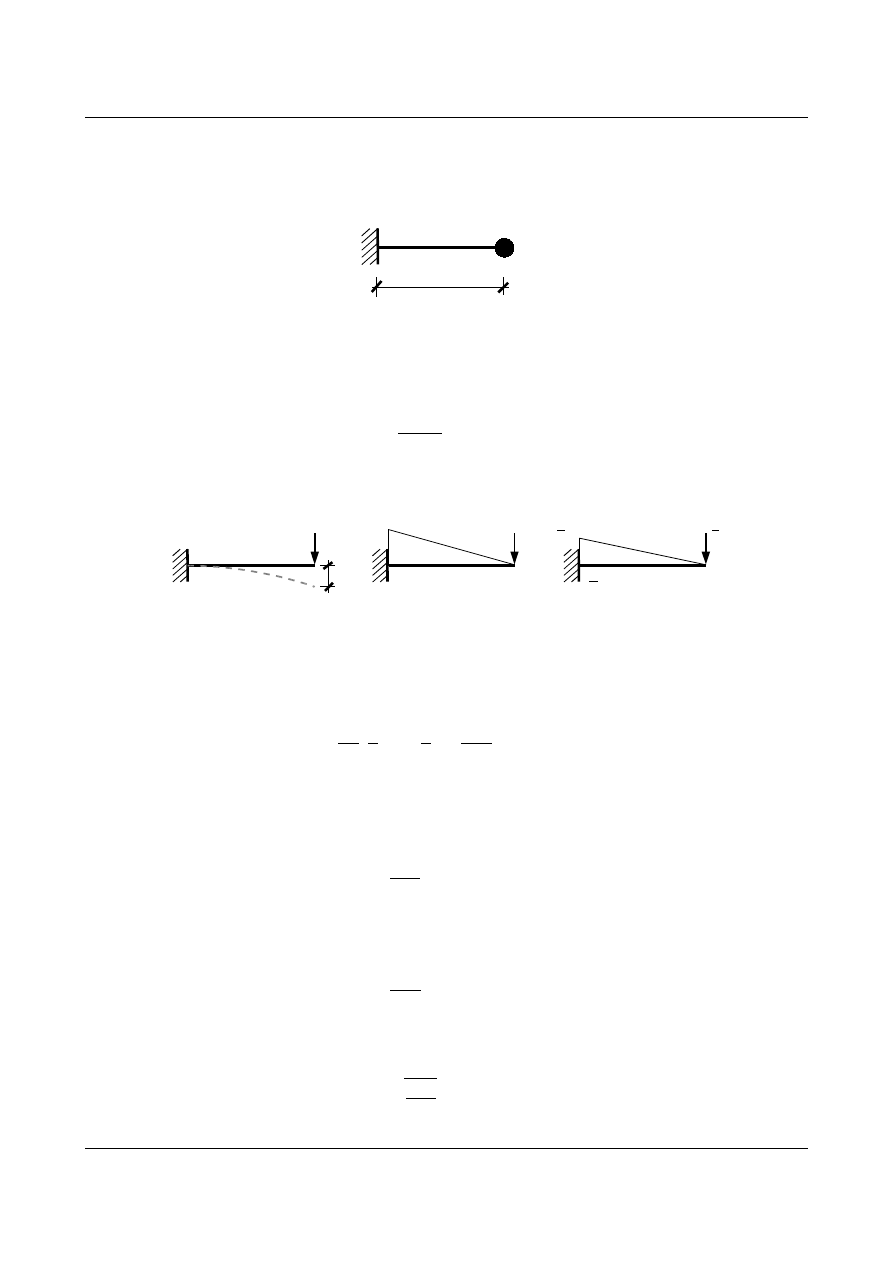
Przykład 1
Znaleźć częstość kołową drgań własnych dla wspornika przedstawionego na rysunku 12.3.
l
EJ
m
Rys. 12.3. Model belki z jedną masą na końcu
Zadanie rozwiążemy korzystając z twierdzenia o pracy wirtualnej. Określimy współczynnik podatności, który
jest odwrotnością sztywności.
1⋅=
∫
0
l
M
P
M
EJ
ds
Narysujmy najpierw wykresy momentów od siły rzeczywistej
P i wirtualnej 1 .
Pl
1
P
P = ?
δ=1
M
P
M
1·l
Rys. 12.4. a) Linia ugięcia belki, b) Wykres momentów od siły P, c) Wykres momentów od 1
Przemieszczenie wyznaczamy z twierdzenia Wereszczegina-Mohra, czyli wymnażając wykresy
M
P
i
M . Po
przekształceniach i uproszczeniu przez jedynkę wirtualną otrzymujemy:
=
1
EJ
1
2
⋅P⋅l⋅l⋅
2
3
⋅l
=
Pl
3
3 EJ
Wiemy, że sztywność [kN/m] to siła jaką należy przyłożyć, aby wywołać jednostkowe przemieszczenie. Zatem
wyznaczone przemieszczenie przyrównujemy do jedynki.
=
Pl
3
3 EJ
=1
Z tego możemy wyznaczyć siłę
P powodującą przemieszczenie δ = 1, inaczej sztywność.
P
=
3 EJ
l
3
=k
Po podstawieniu otrzymanej sztywności do wzoru (12.7) otrzymujemy częstość kołową drgań własnych belki.
=
3 EJ
ml
3
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
6
Przykład 2
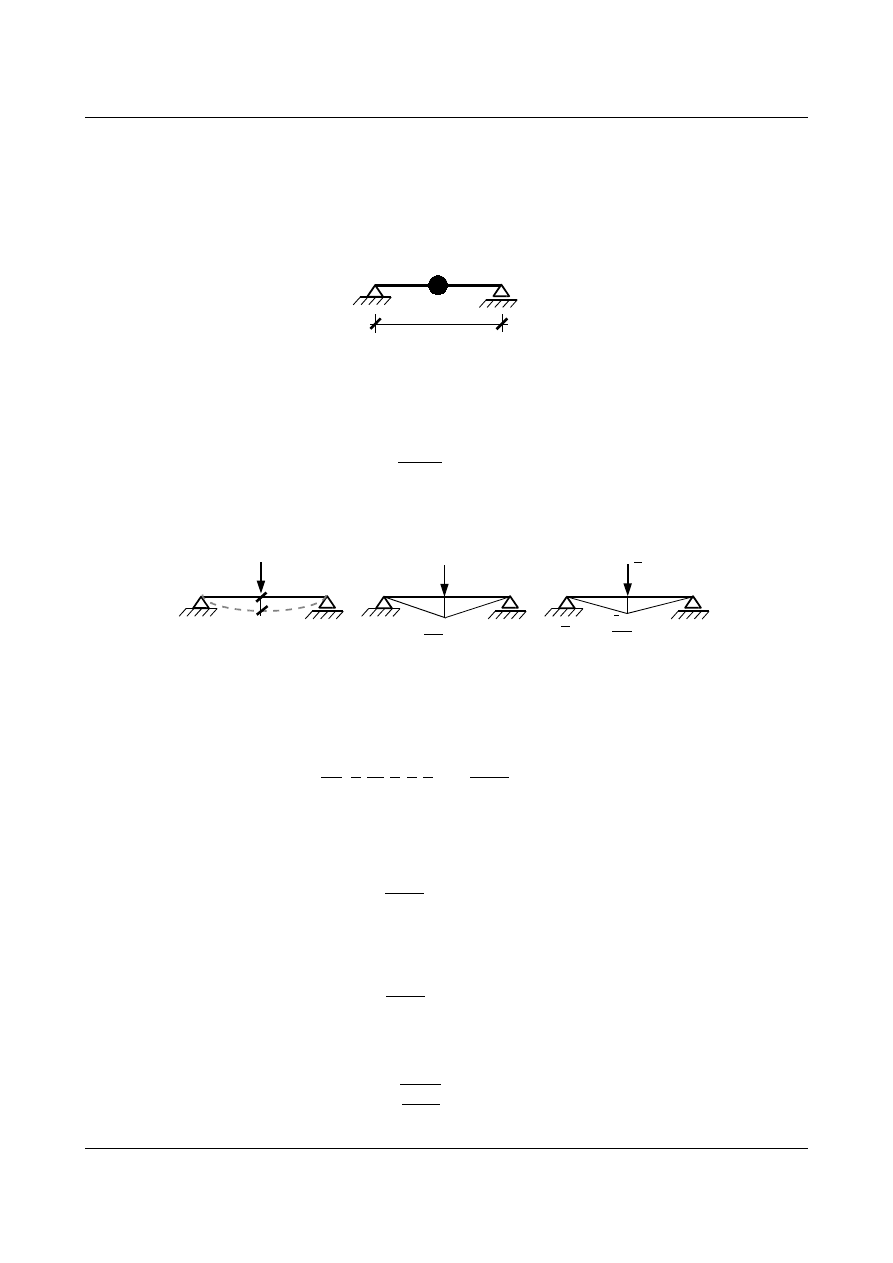
Znaleźć częstość kołową drgań własnych dla belki wolnopodpartej (rys. 12.5).
EJ
l
m
Rys. 12.5. Belka wolnopodparta z masą w środku rozpiętości
Zadanie rozwiążemy analogicznie jak poprzednie, również korzystając z twierdzenia o pracy wirtualnej.
1⋅=
∫
0
l
M
P
M
EJ
ds
Po narysowaniu wykresów momentów od siły rzeczywistej
P i wirtualnej 1 .
Pl
1
P
P = ?
δ = 1
M
P
M
4
4
1·l
Rys. 12.6. a) Linia ugięcia belki, b) Wykres momentów od siły P, c) Wykres momentów od 1
wyznaczmy przemieszczenie
δ
=
1
EJ
1
2
⋅
Pl
4
⋅
l
2
⋅
2
3
⋅
l
4
⋅2 =
Pl
3
48 EJ
Skoro sztywność to siła jaką należy przyłożyć, aby wywołać jednostkowe przemieszczenie, to możemy zapisać
=
Pl
3
48 EJ
=1
Z tego wyznaczamy siłę
P równą sztywności układu
P
=
48 EJ
l
3
=k
a następnie częstość kołową drgań własnych belki ze wzoru (12.7)
=
48 EJ
ml
3
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
7
Aby poznać wartość liczbową częstości drgań własnych musimy określić sztywność giętną belki EJ, znać
wartość masy przyłożonej w środku rozpiętości i długość belki.
Przykład 3
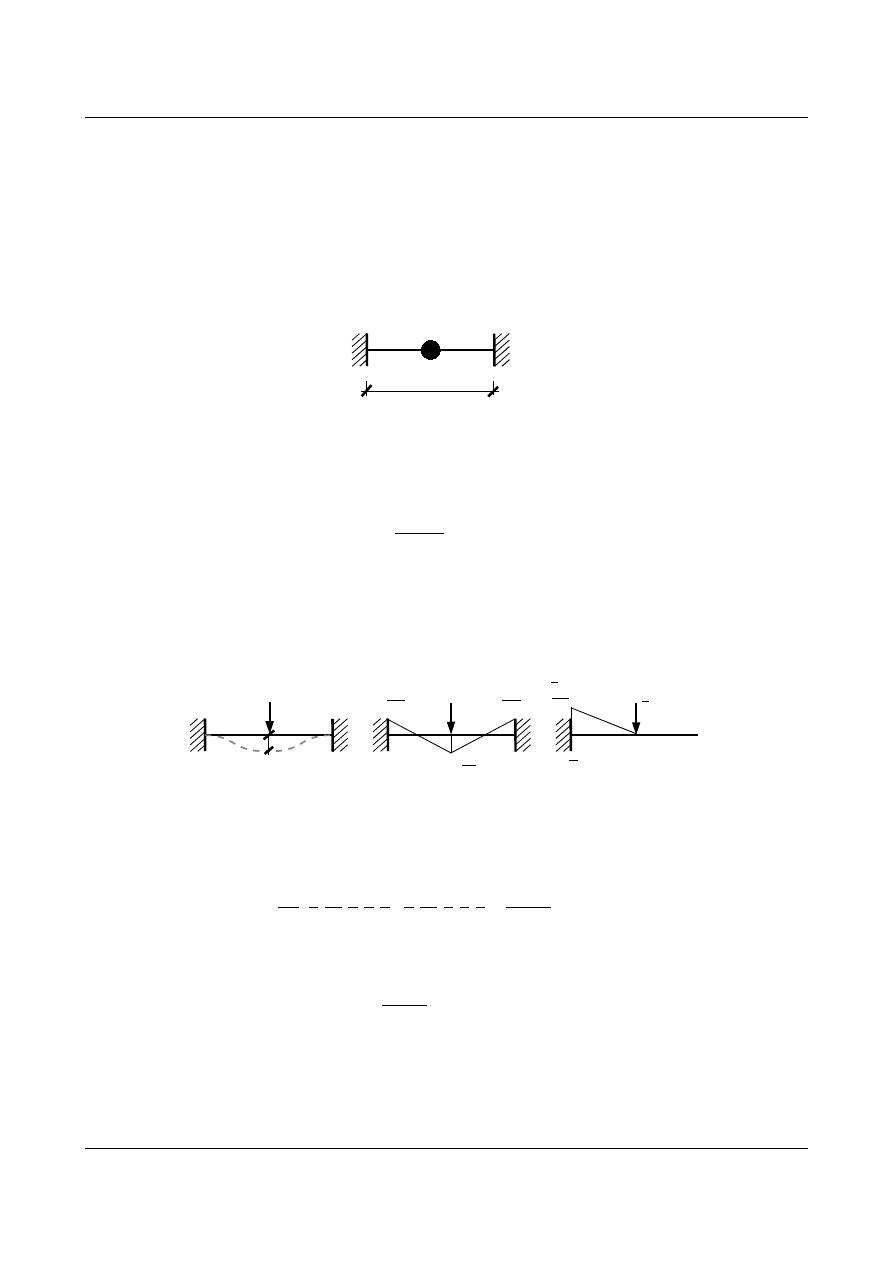
Znaleźć częstość kołową drgań własnych dla belki obustronnie utwierdzonej (rys. 12.7).
l
EJ
m
Rys. 12.7. Belka obustronnie utwierdzona – przybliżona masą w środku rozpiętości
Ponieważ jest to układ statycznie niewyznaczalny, dlatego należy rozwiązać go korzystając z twierdzenia
redukcyjnego.
1⋅=
∫
0
l
M
P
M
o
EJ
ds
gdzie:
M
P
- wykres momentów od siły
P w układzie statycznie niewyznaczalnym,
M
o
- wykres momentów od siły 1 w układzie podstawowym.
Pl
1
P
P = ?
δ = 1
M
P
M
8
Pl
8
Pl
8
2
1·l
Rys. 12.8. a) Linia ugięcia belki, b) Wykres momentów od siły P, c) Wykres momentów od 1
Wyznaczmy przemieszczenie od siły
P:
=
1
EJ
1
2
⋅
Pl
8
⋅
l
2
⋅
2
3
⋅
l
2
−
1
2
⋅
Pl
8
⋅
l
2
⋅
1
3
⋅
l
2
=
Pl
3
192 EJ
i przyrównajmy je do jedynki
=
Pl
3
192 EJ
=1
Następnie wyznaczamy sztywność (siłę
P dla której δ = 1)
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
8
P
=
192 EJ
l
3
=k
Po podstawieniu otrzymanej sztywności do wzoru (12.7) otrzymujemy częstość kołową drgań własnych belki.
=
192 EJ
ml
3
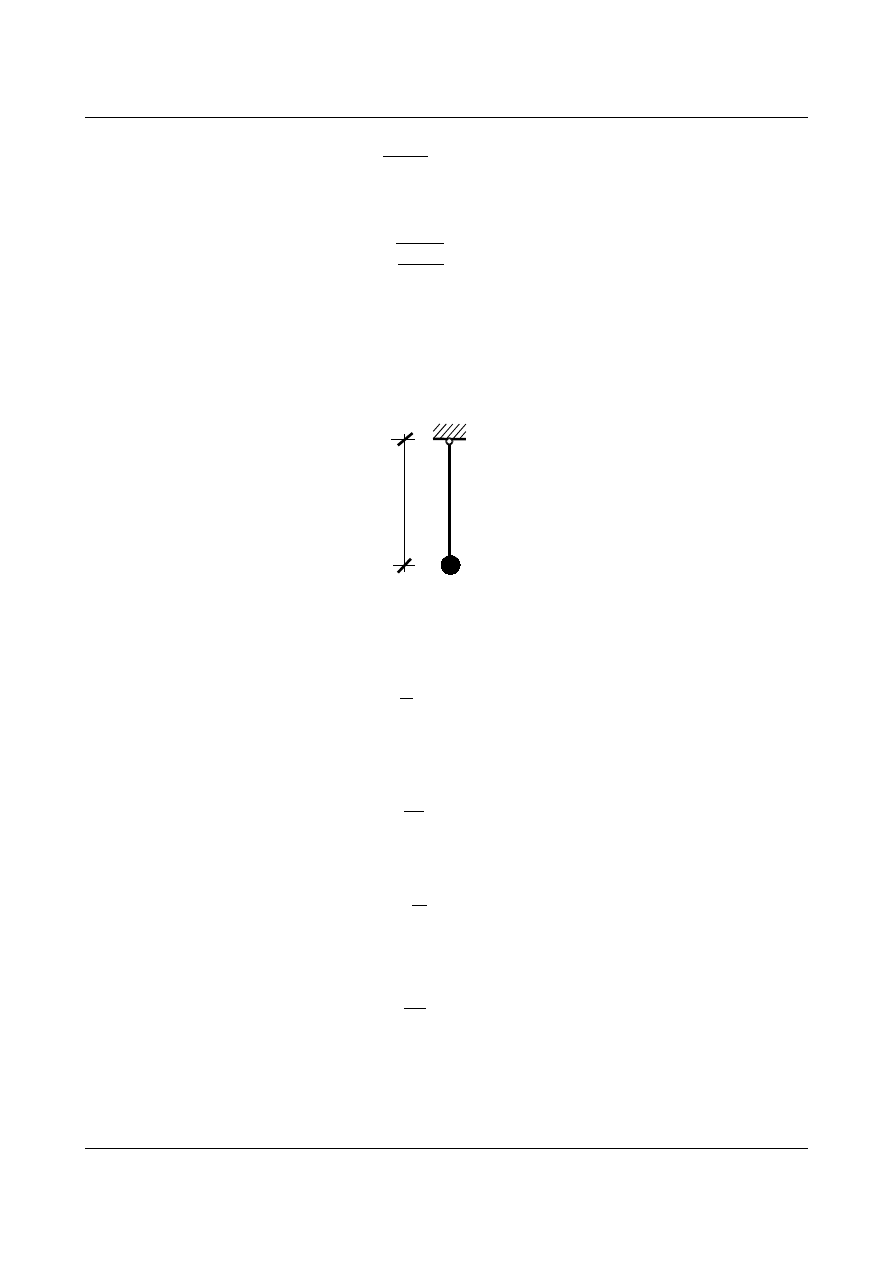
Przykład 4
Znaleźć częstość kołową drgań własnych dla schematu jak na poniższym rysunku (rys. 12.9).
l
EJ
m
Rys. 12.9. Pręt pionowy zamocowany przegubowo
Zgodnie z prawem Hooke'a odkształcenie jest wprost proporcjonalne do naprężenia, które je spowodowało:
=
1
E
⋅
Poza tym odkształcenie pręta jest równe wydłużeniu względnemu (przyrost długości
Δl do długości l):
=
l
l
Wiedząc, że
N
=
N
A
na podstawie powyższych zależności możemy zapisać
l=
N
EA
⋅l
Szukamy siły
N, która wywoła jednostkowe wydłużenie pręta, zatem przyrównajmy Δl do jedynki:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
9
l=
N
EA
⋅l=1
Jest to inaczej sztywność podłużna tego pręta,
k
=N =
EA
l
na podstawie której możemy wyliczyć częstość kołową drgań własnych konstrukcji (12.27)
=
EA
ml
Należy zwrócić uwagę na fakt, że drgania (przemieszczenia) odbywają się wzdłuż osi pręta.
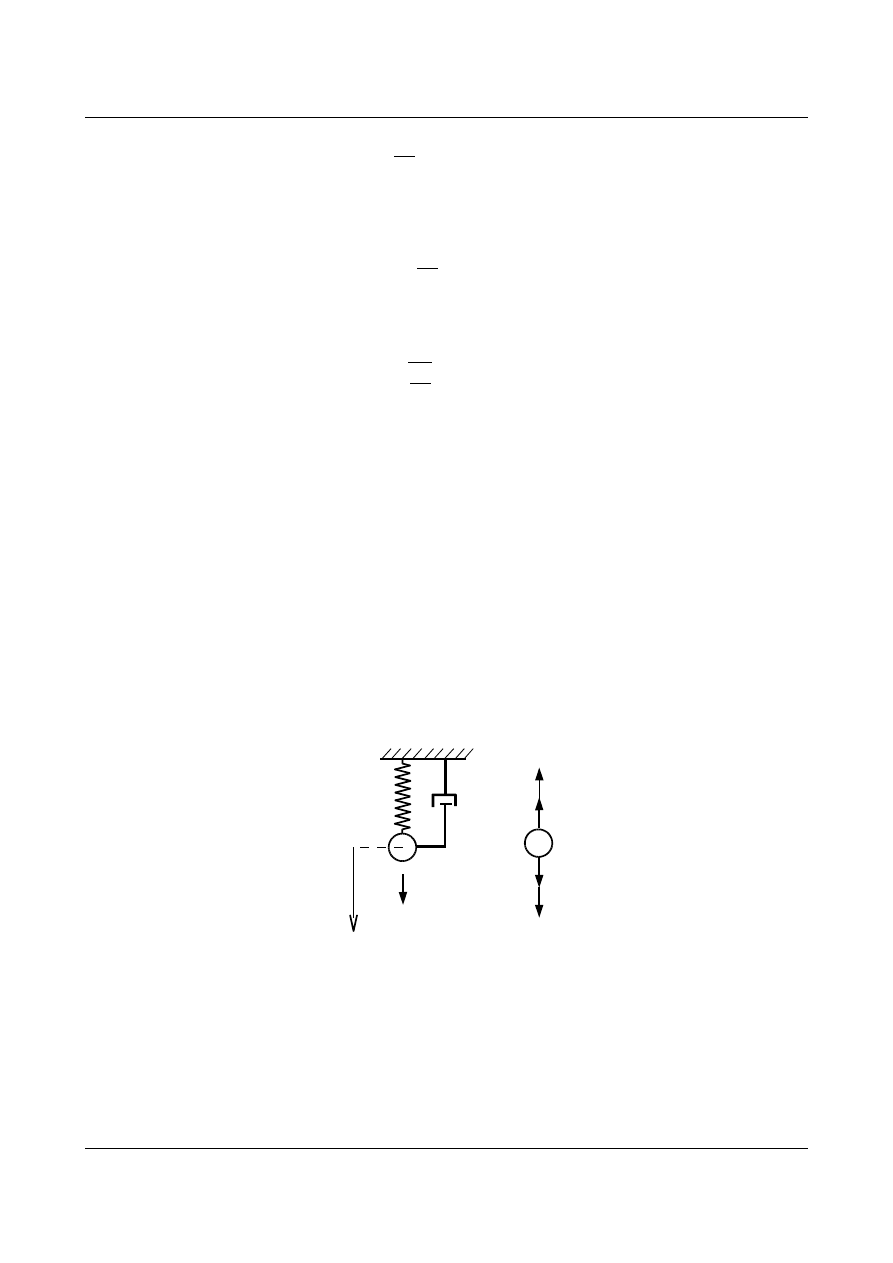
12.4. Drgania własne tłumione
Tłumienie drgań jest wynikiem działania na ciało sił oporu oznaczanych jako R . W tłumieniu lepkim
(wiskotycznym), siły te są proporcjonalne do prędkości ruchu ciała.
R
≃c⋅˙qt
(12.19)
Na rys. 12.10 przedstawiono drgające ciało o masie
m i jednym stopniu swobody, którego ruch jest tłumiony
wiskotycznie. Przemieszczenia (drgania) opisuje funkcja
q(t).
m
q(t)
k [N/m]
tłumik
c
P(t)
P(t)
B(t)
R(t)
Q(t)
m
Rys. 12.10. Model układu drgającego z tłumieniem
Zgodnie z zasadą d' Alemberta możemy zapisać równanie drgań własnych tłumionych jako równowagę sił:
P
t
B
t
−Q
t
−R
t
=0
Dla układu nieobciążonego
P
t =0
można zapisać:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater

Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
10
m
⋅¨q
t
c⋅˙q
t
k⋅q
t
=0
(12.20)
W równaniu (12.20) wielkość
c jest stałą tłumienia.
Dzieląc obustronnie równanie (12.20) przez masę drgającego ciała otrzymujemy równanie:
¨q
t
2 ⋅˙q
t
2
⋅q
t
=0
(12.21)
w którym
=
c
2 m
, to współczynnik tłumienia drgań,
2
=
k
m
to częstość drgań własnych.
Rozwiązaniem, całką ogólną równania ruchu (12.21) jest funkcja wykładnicza:
q
t = A e
rt
(12.22)
której pochodne wynoszą:
˙qt =A r e
rt
¨qt=A r
2
e
rt
Podstawiamy funkcję (12.22) i jej pochodne do równania ruchu (12.21). Po przekształceniach otrzymujemy
równanie charakterystyczne postaci:
r
2
2 r
2
=0
(12.23)
W zależności od wielkości tłumienia (parametr
c) mamy trzy możliwe, różne rozwiązania równania
charakterystycznego:
1. Małe tłumienia
0
– rozwiązaniem są dwa pierwiastki zespolone, sprzężone,
2. Duże tłumienia
0
– rozwiązaniem są dwa pierwiastki rzeczywiste,
3.
=0 – rozwiązaniem są dwa pierwiastki podwójne,
gdzie:
=
2
2
−4⋅
2
=4⋅
2
−4⋅
2
=4
2
−
2
Znak wyrażenia
zależy od stosunku do , dla mamy 0 .
Przeanalizujmy rozwiązania:
Ad 1. Zajmijmy się teraz przypadkiem, gdy tłumienia są małe
(tłumienie podkrytyczne). Możliwe są
dwa rozwiązania (pierwiastki zespolone, bo
0 ):
r
1
=−i
2
−
2
r
2
=i
2
−
2
(12.24)
Ostatecznie funkcję rozwiązującą można zapisać w postaci:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
11
q
t
=A e
−t
sin
1
t
(12.25)
która jest równoważna (przez analogię do poprzednich rozważań) wyrażeniu:
q
t
=e
−t
C
1
⋅cos
1
t
C
2
⋅sin
1
t
(12.26)
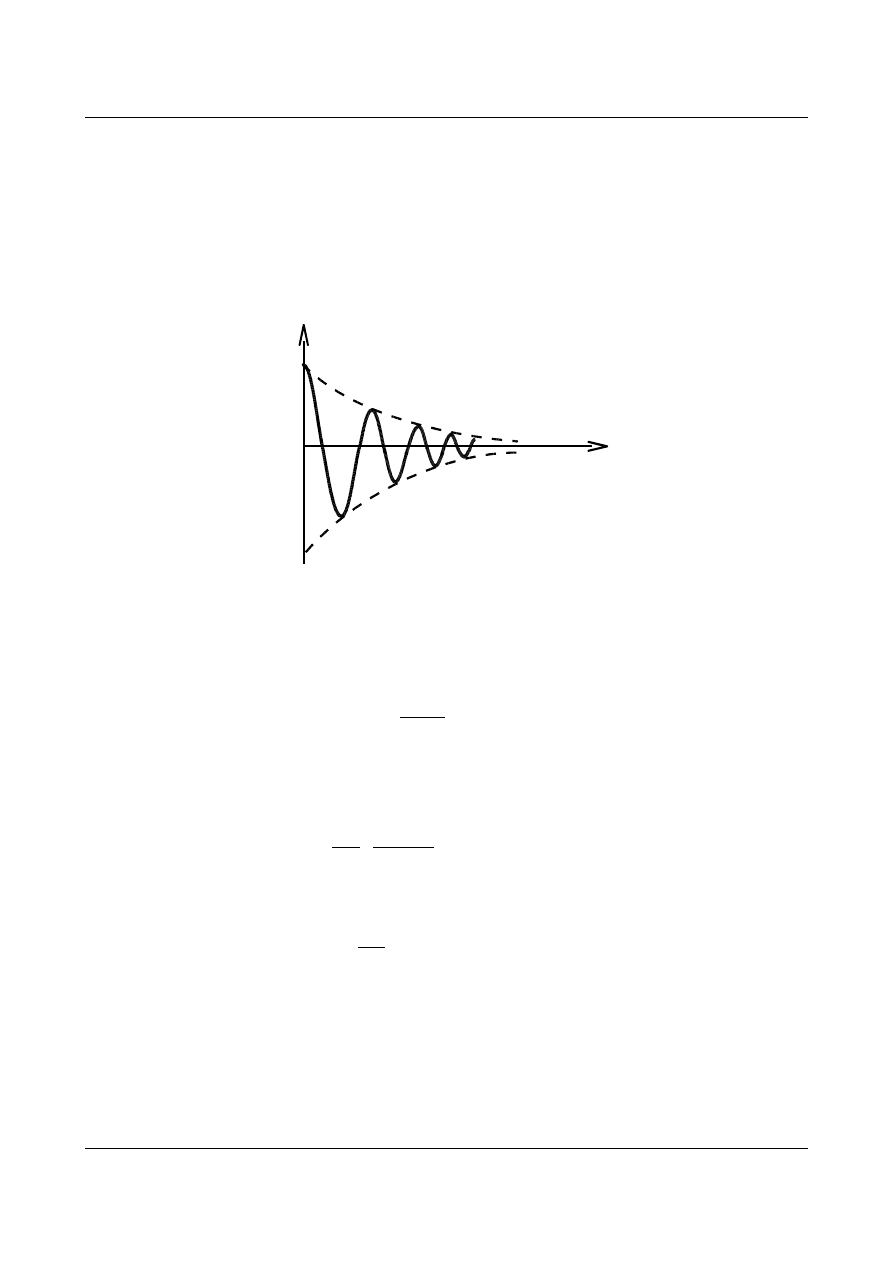
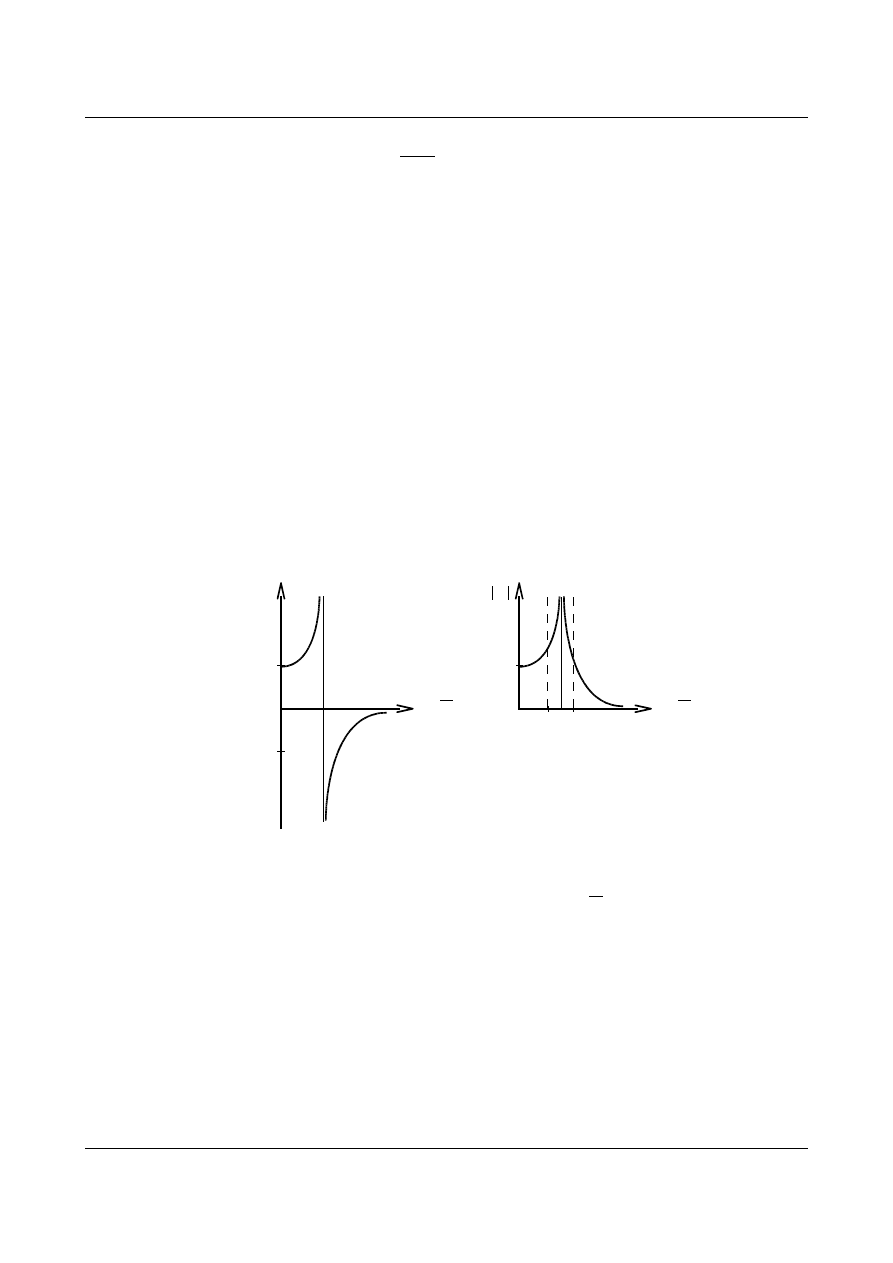
Na rys. 12.11 przedstawiono wykres funkcji rozwiązującej (12.26).
q(t)
t
e
-ρt
Rys. 12.11. Funkcja rozwiązująca (tłumienie podkrytyczne)
Na rysunku 12.11 widzimy, że drgania oscylują, następuje redukcja amplitudy przemieszczenia
(zmniejsza się do zera). Okres drgań T
1
jest większy w tym przypadku, ponieważ częstość kołowa
1
drgań
tłumionych jest mniejsza w porównaniu z drganiami nietłumionymi -
1
.
1
=
2
−
2
(12.27)
Miarą tłumienia jest logarytmiczny dekrement tłumienia
λ, który oblicza się ze stosunku amplitud
kolejnych przemieszczeń:
q
n
1
q
n
=
A e
−
t
T
1
A e
− t
=e
−T
1
czyli:
=ln
∣
q
n
1
q
n
∣
=ln
∣
e
−T
1
∣
=T
1
(12.28)
Na podstawie wyrażenia (12.28) można powiedzieć, że logarytmiczny dekrement tłumienia to logarytm
naturalny ze stosunku dwóch amplitud oddalonych od siebie o okres. Jest on wprost proporcjonalny do
współczynnika tłumienia.
=T
1
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
12
Zadanie 1
Kolejne amplitudy drgań własnych maleją dwukrotnie, znaleźć relacje pomiędzy
ω
1
a
ω oraz określić
logarytmiczny dekrement tłumienia
λ.
=ln
∣
A e
−
t
T
1
A e
−t
∣
gdzie:
A e
−t
- amplituda po czasie
t,
A e
−
t
T
1
- kolejna amplituda po czasie
t + T
1
.
Ponieważ kolejne amplitudy drgań maleją dwukrotnie, to:
A e
−
t
T
1
A e
−t
=
1
2
A zatem logarytmiczny dekrement tłumienia wynosi:
=ln
∣
1
2
∣
Ze wzoru (12.28) wiemy, że
=T
1
=ln
∣
1
2
∣
Skoro
T
1
=
2
1
to
2
1
=ln
∣
1
2
∣
=
1
2
⋅ln
∣
1
2
∣
Na podstawie wzoru (12.27) możemy wyznaczyć relację między
ω
1
a
ω:
1
2
=
2
−
1
2
⋅ln
∣
1
2
∣
2
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
13
1
2
[
1
ln
∣
1
2
∣
2
2
]
=
2
1
=
1
ln
∣
1
2
∣
2
2
Ad 2. Rozpatrzmy teraz przypadek, gdy tłumienia są duże
(tłumienie nadkrytyczne). Wówczas również
otrzymujemy dwa rozwiązania (tym razem rzeczywiste) równania charakterystycznego:
r
1
=−−
2
−
2
r
2
=−
2
−
2
(12.29)
Funkcja rozwiązująca dla tego przypadku ma następującą postać:
q
t
=e
−t
C
1
⋅sinh
1
t
C
2
⋅cosh
1
t
(12.30)
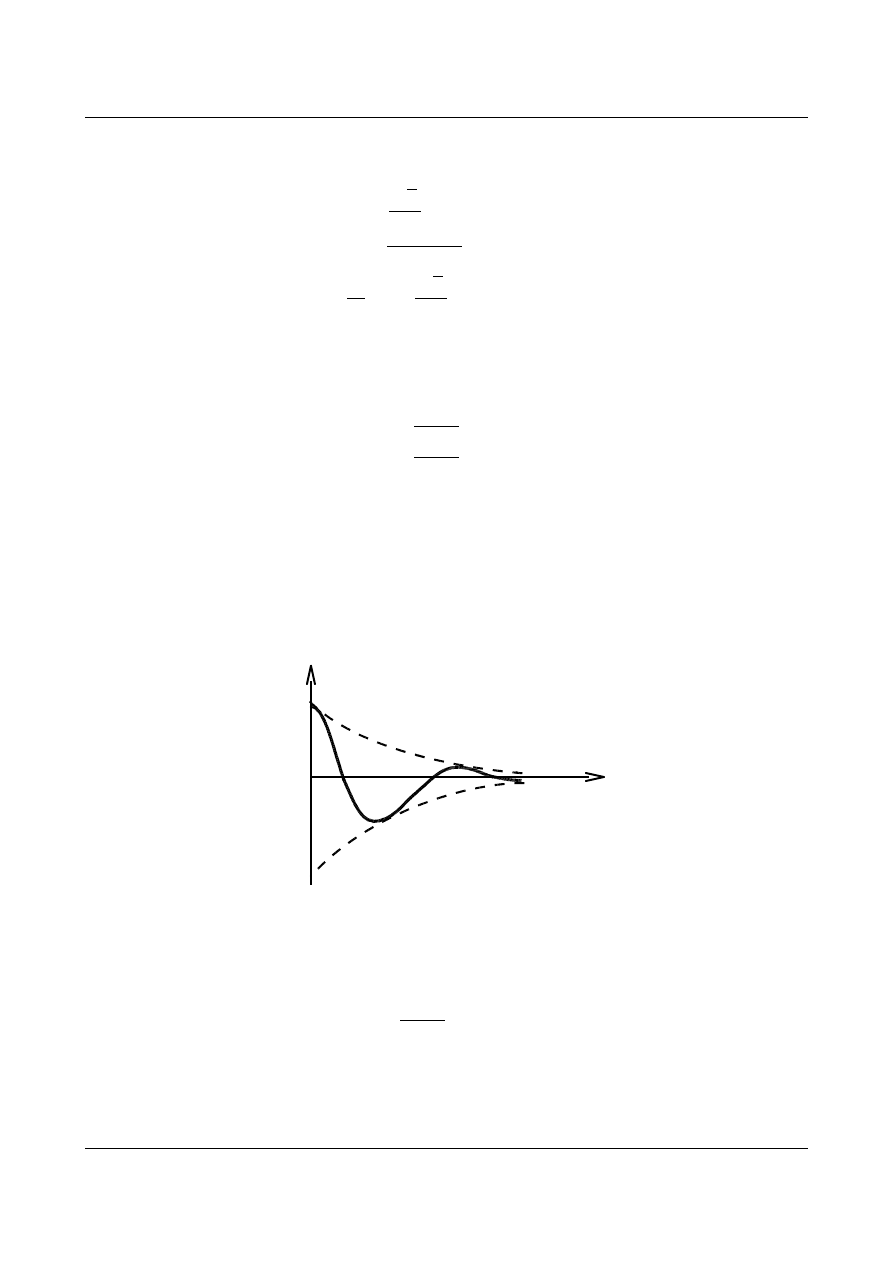
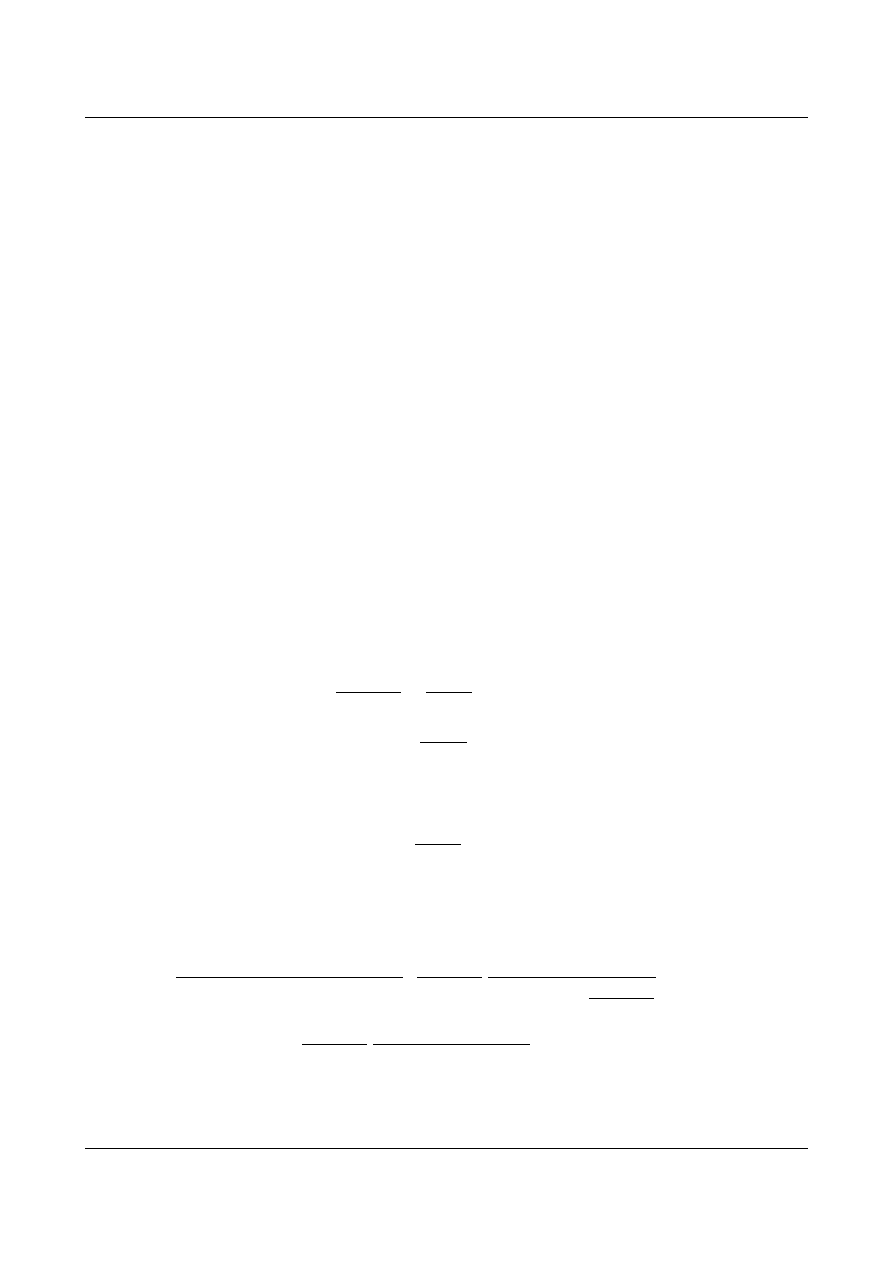
Na rys. 12.12 przedstawiono wykres funkcji rozwiązującej (12.30).
q(t)
t
Rys. 12.12. Funkcja rozwiązująca (tłumienie nadkrytyczne)
Z rys. 12.12 wynika, że drgania z tłumieniem nadkrytycznym szybko zanikają i nie mają charakteru
oscylacyjnego. Częstość kołowa drgań własnych wynosi:
1
=
2
−
2
(12.31)
Ad 3. W przypadku tłumienia krytycznego, tzn. gdy
= , rozwiązanie przyjmuje postać funkcji:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
14
q
t
=e
− t
C
1
⋅t
C
2
(12.32)
której przebieg drgań jest bardzo podobny do drgań nadkrytycznych.
12.5. Drgania wymuszone nietłumione
Rozpatrzmy układ o jednym stopniu swobody dynamicznej, zamocowany sprężyście, w którym siła
wymuszająca jest harmonicznie zmienna w czasie (rys. 12.13).
m
q(t)
k [N/m]
P(t)
P(t)
B(t)
m
Q(t)
Rys. 12.13. Model układu o jednym stopniu swobody
Zgodnie z zasadą d'Alemberta możemy zapisać równanie równowagi:
P
t
B
t
−Q
t
=0
Po podstawieniu zależności (12.3) i (12.4) mamy:
m
⋅¨q
t
k⋅q
t
=P
t
(12.33)
gdzie P
t jest siłą wymuszającą zmienną w czasie, której wartość w przypadku drgań harmonicznych
można zapisać jako sumę:
P
t
=P
1
sin pt
P
2
cos pt
=P sin
pt
(12.34)
gdzie:
p – częstość kołowa drgań wymuszonych,
P – amplituda siły wymuszającej,
– kąt przesunięcia fazowego.
Wprowadzając do równania równowagi (12.33) wyrażenie opisujące częstość kołową drgań własnych (12.7)
otrzymujemy po przekształceniach:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater

Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
15
¨q
t
2
⋅q
t
=
P
m
⋅sin
pt
(12.35)
Dalej stosunek amplitudy siły wymuszającej do masy oznaczamy symbolem
Q:
Q
=
P
m
(12.36)
Rozwiązaniem równania różniczkowego (12.35) jest funkcja, będąca sumą całki ogólnej i całki szczególnej:
q
t
=C
1
⋅sin tC
2
⋅cos t
Q
2
− p
2
⋅sin
pt
(12.37)
gdzie wyrażenia:
C
1
⋅sin tC
2
⋅cos t
- to całka ogólna równania różniczkowego, którą otrzymujemy poprzez rozwiązanie
równania różniczkowego jednorodnego
¨q
t
2
⋅q
t
=0
,
Q
2
− p
2
⋅sin
pt
- to całka szczególna równania różniczkowego, wyznaczyć ją możemy w prosty sposób
stosując metodę przewidywań.
Jeżeli przyjmiemy przesunięcie fazowe
=0 oraz dobierzemy takie warunki początkowe, aby wartości
stałych całkowania C
1
=C
2
=0 , to funkcja rozwiązująca będzie miała postać:
q
t
=
Q
2
− p
2
⋅sin pt=
Q
2
1
−
p
2
2
⋅sin pt
(12.38)
W wyrażeniu (12.38) stosunek
Q
2
=
P
m
2
=
P
m
k
m
=
P
k
=A
stat
(12.39)
jest wartością (amplitudą) przemieszczenia statycznego.
Jeżeli stosunek częstości wymuszenia do częstości drgań własnych opiszemy współczynnikiem
=
p
(12.40)
to mianownik wyrażenia (12.38) można wydzielić jako:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
16
d
=
1
1
−
2
(12.41)
Ostatecznie, więc funkcja rozwiązująca przyjmuje postać:
q
t
=A
stat
d
sin pt
(12.42)
gdzie:
A
stat
– amplituda statyczna (przemieszczenie punktu drgającego wywołane statyczną siłą P ),
d
– współczynnik dynamiczny drgań wymuszonych.
Współczynnik dynamiczny
d
zwiększa amplitudę przemieszczeń statycznych układu. Gdy częstość kołowa
drgań wymuszonych
p
jest bliska częstości drgań własnych układu
, ugięcie (amplituda przemieszczenia)
wobec braku tłumienia wzrasta do nieskończoności przy niezmiennej wartości działającej siły.
Opisane zjawisko nazywamy rezonansem. Strefy rezonansowe (obszar wzrostu amplitudy) możemy
określić tworząc wykres wartości współczynnika dynamicznego
d
w zależności od współczynnika
(stosunek częstości wymuszenia
p do częstości drgań własnych
).
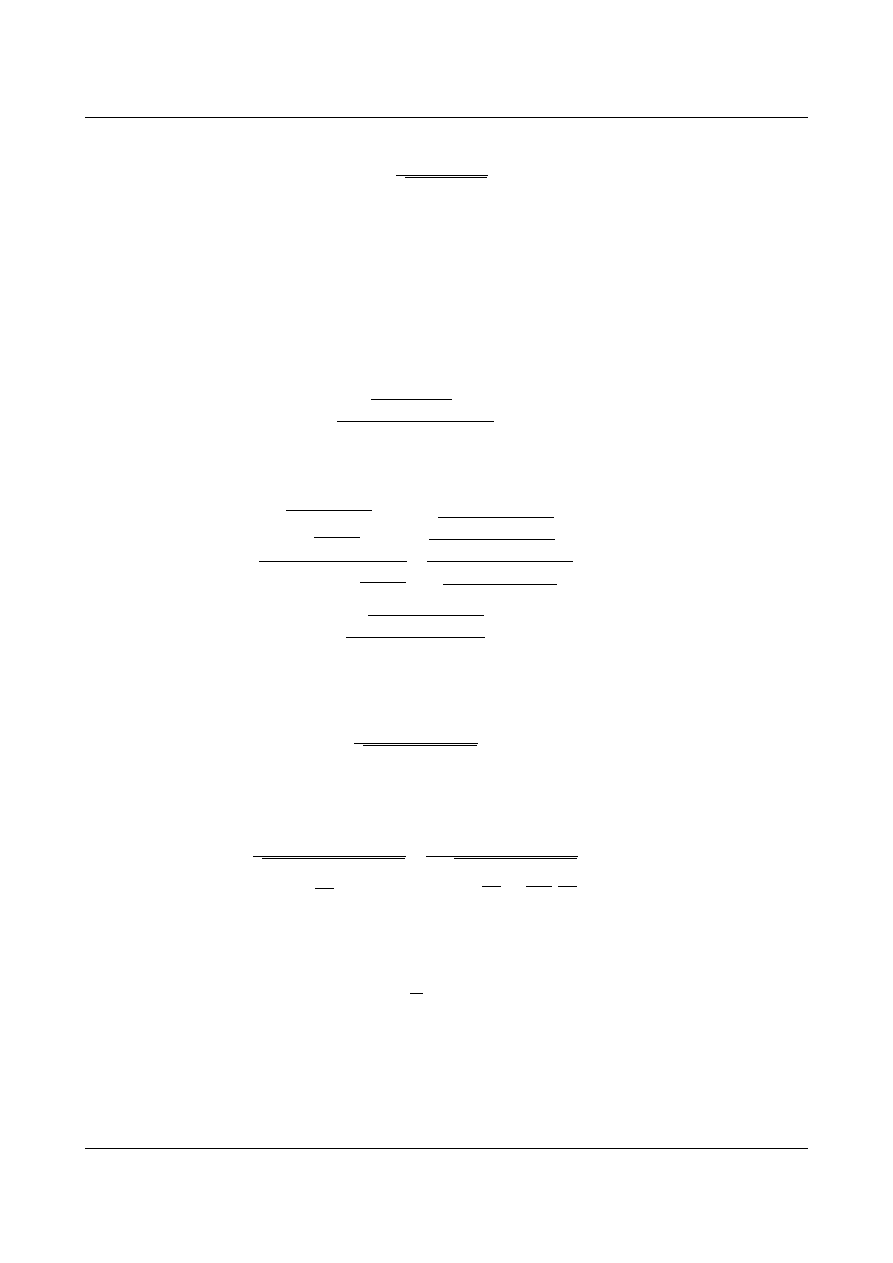
1
1
1
ν
d
1
1
0,75
1,25
ν
d
η
=
p
ω
η
=
p
ω
Rys. 12.14. Wykres współczynnika dynamicznego ν
d
(η)
Strefą rezonansową określa się jako przedział, w którym stosunek częstości
p
waha się w granicach od
0,75
do
1,25. Aby uchronić konstrukcję przed zniszczeniem należy unikać stosowania częstości wymuszenia w
granicach stref rezonansowych.
12.6. Drgania wymuszone tłumione
W rozważaniach zakładamy tłumienie wiskotyczne oraz harmoniczną siłę wymuszającą. Postępując
analogicznie jak w przypadku drgań własnych tłumionych (bez wymuszenia) możemy zapisać równanie
równowagi (rys. 12.10).
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater

Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
17
P
t
B
t
−Q
t
−R
t
=0
i dalej na podstawie (12.34):
m
⋅¨q
t
c⋅˙q
t
k⋅q
t
=P
1
sin pt
P
2
cos pt
=P sin
pt
(12.43)
Po przekształceniach otrzymujemy równanie różniczkowe ruchu:
¨q
t
2 ⋅˙q
t
2
⋅q
t
=
P
m
⋅sin
pt
a po uwzględnieniu (12.36):
¨q
t
2 ⋅˙q
t
2
⋅q
t
=Q⋅sin
pt
(12.44)
Rozwiązanie tego równania różniczkowego będzie składało się tak jak poprzednio z sumy dwóch całek -
ogólnej i szczególnej. Przy założeniu, że całka ogólna obrazuje drgania szybko zanikając, jest ona mało
znacząca w przypadku wystąpienia tłumienia. Zajmijmy się zatem wyłącznie rozwiązaniem szczególnym
równania różniczkowego. Rozwiązaniem szczególnym tego równania może być funkcja:
q
t
=A sin
pt
(12.45)
Różniczkując dwukrotnie powyższe rozwiązanie i podstawiając funkcje
q
t
, ˙qt , ¨qt
do równania (12.44)
otrzymujemy układ dwóch równań, w którym niewiadomymi są amplituda
A oraz przesunięcie fazowe φ:
¨q
t
2 ⋅˙q
t
2
⋅q
t
=Q⋅sin
pt
q
t
= A sin
pt
=A sin
pt
−
=A sin
[
pt−
]
˙q
t
= pA cos
pt
= pA cos
pt
−
= pA cos
[
pt−
]
¨q
t
=− p
2
A sin
pt
=− p
2
A sin
pt
−
=− p
2
A sin
[
pt−
]
Podstawiamy
q
t
, ˙qt, ¨qt
do równania (12.44)
− p
2
A sin
[
pt−
]
2 pA cos
[
pt−
]
2
A sin
[
pt−
]
=Q sin
pt
Po rozpisaniu
− p
2
A
[
sin
pt
cos
−cos pt sin−
]
2 pA
[
cos
pt
cos
−−sin pt sin−
]
2
A
[
sin
pt
cos
−cos pt sin−
]
=Q⋅sin
pt
wyłączamy części:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
18
-dla
sin (pt+ε)
− p
2
A sin
pt
cos
−−2 pA sin pt sin−
2
A sin
pt
cos
−=Q⋅sin
pt
− p
2
A cos
−−2 pA sin−
2
A cos
−=Q
-dla
cos (pt+ε)
− p
2
A cos
pt sin−2 pA cos
pt
cos
−
2
A cos
pt sin−=0
− p
2
A sin
−2 pA cos−
2
A sin
−=0
Powstał układ równań:
{
− p
2
A cos
−−2 pA sin−
2
A cos
−=Q
− p
2
A sin
−2 pA cos−
2
A sin
−=0
(12.46)
Przekształcamy równanie 2
A
[
2
− p
2
sin−2 p cos−
]
=0
Ponieważ amplituda drgań
A nie może być równa zeru, to przyrównajmy wyrażenie w nawiasie do zera:
2
− p
2
sin−2 p cos−=0
2
− p
2
sin−=−2 p cos−
sin
−
cos
−
=−
2
p
2
− p
2
tg
−=−
2
p
2
− p
2
Z niego otrzymujemy zależność:
tg
−=
2
p
2
− p
2
(12.47)
Następnie z równania 1 wyznaczamy:
A
[
2
− p
2
cos−−2 p sin−
]
=Q
A
=
Q
2
− p
2
cos−−2 p sin−
=
1
cos
−
⋅
Q
2
− p
2
−2 p
sin
−
cos
−
A
=
1
cos
−
⋅
Q
2
− p
2
−2 p tg −
Wiedząc, że
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
19
cos
−=
1
1
tg
2
−
(12.48)
oraz
cos
−=cos−
sin
−=−sin−
tg
−=−tg −
możemy zapisać:
A
=
1
tg
2
−⋅Q
2
− p
2
2 p tg −
(12.49)
Do wzoru (12.49) opisującego amplitudę podstawiamy rozwiązanie (12.47)
A
=
1
2
p
2
− p
2
2
⋅Q
2
− p
2
2 p
2
p
2
− p
2
=
2
− p
2
2
4
2
p
2
2
− p
2
⋅Q
2
− p
2
2
4
2
p
2
2
− p
2
A
=
Q
2
− p
2
2
4
2
p
2
2
− p
2
2
4
2
p
2
Ostatecznie otrzymujemy:
A
=
Q
2
− p
2
2
4
2
p
2
(12.50)
Rozwiązanie to można zapisać inaczej:
A
=
Q
[
2
1
−
p
2
2
]
2
4
2
p
2
=
Q
2
1
−
p
2
2
2
4
2
2
⋅
p
2
2
gdzie:
Q
=
P
m
Dzieląc licznik i mianownik przez
2
otrzymujemy wyrażenie, które można zastąpić ilorazem:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
12. WPROWADZENIE DO DYNAMIKI BUDOWLI
20
Q
2
=
P
m
2
=
P
k
i dalej, amplitudę przemieszczenia dynamicznego wyrażamy przez przemieszczenie statyczne i współczynnik
dynamiczny:
A
=
P
k
⋅
1
1
−
p
2
2
2
4
2
2
⋅
p
2
2
=A
stat
d
(12.51)
Przyjęcie oznaczeń:
=
p
=
prowadzi do prostszej formy współczynnika dynamicznego.
d
=
1
1
−
2
2
4
2
⋅
2
(12.52)
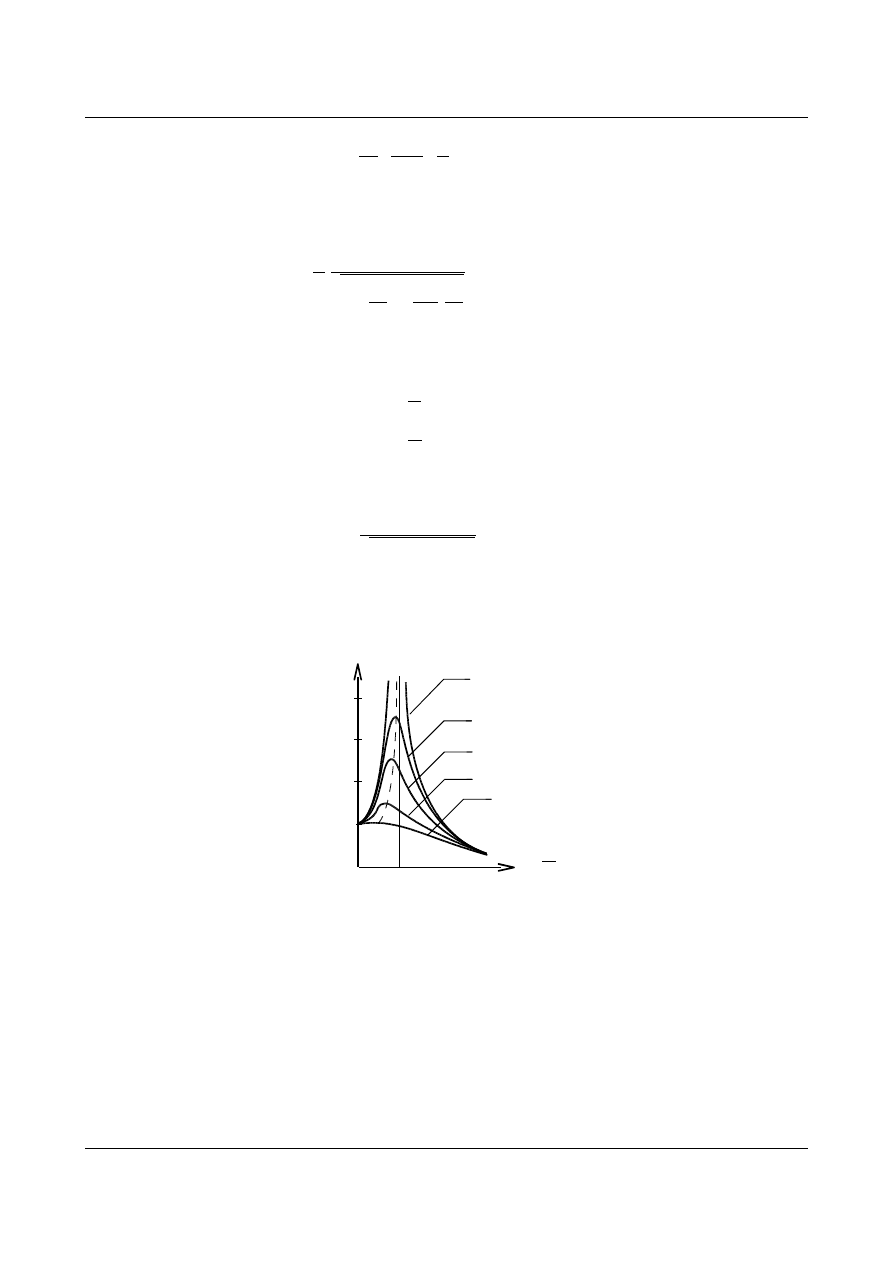
Wykresy funkcji
d
w zależności od ilorazu
dla różnych współczynników tłumienia przedstawiono na
rys. 12.15.
1
1
ν
d
2
3
4
ρ=0
ρ=0,15
ρ=0,25
ρ=0,5
ρ=1
η
=
p
ω
Rys. 12.15. Wykres współczynnika dynamicznego ν
d
(η) dla układów tłumionych
Wartość amplitudy przemieszczenia (12.51) jest uzależniona od współczynnika dynamicznego
d
.
Zjawisko czystego rezonansu nie zajdzie, gdyż amplituda przemieszczenia w układach z tłumieniem nie
wzrasta do nieskończoności. Jednak osiąga największe wartości dla
=1 .
Ponadto, w zależności od wartości ilorazu
drgań mówimy o:
1 – niskim strojeniu konstrukcji,
1 – wysokim strojeniu konstrukcji.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Wyszukiwarka
Podobne podstrony:
2001 12 30
12 30 86
2002 12 30
2013 12 30 Ks Oko o gender
2016 12 30 Dorosłe dzieci
Metodologia lista stan na 23 stycznia godz 12 30
1988 12 30 O powołaniu świeckich
2018 12 30 Kielce Nauczycielka biologii krytykuje homoseuksualizm Do Rzeczy
1999 12 30 Rozporządzenie RM Klasyfikacja środków trwałych
2012 12 30 Zakres materialu pytania
FIDE Trainers Surveys 2012 12 30 Alexander Beliavsky Two endgames with same colour Bishops
C5 (X7) B1KT0102P0 12 30 06 2014 Modyfikacja Dodatek do paliwa a filtr cząstek stałych
2015 12 30 Jeśli pies szczeka właścicielowi grozi kara
2018 12 30 Mieszkańcy dużych miast
1987 12 30 Sollicitudo rei socialis
FIDE Trainers Surveys 2017 12 30 Georg Mohr Rook against pawn (Basic level)
2002 12 30
więcej podobnych podstron