1.
Postulaty statyki
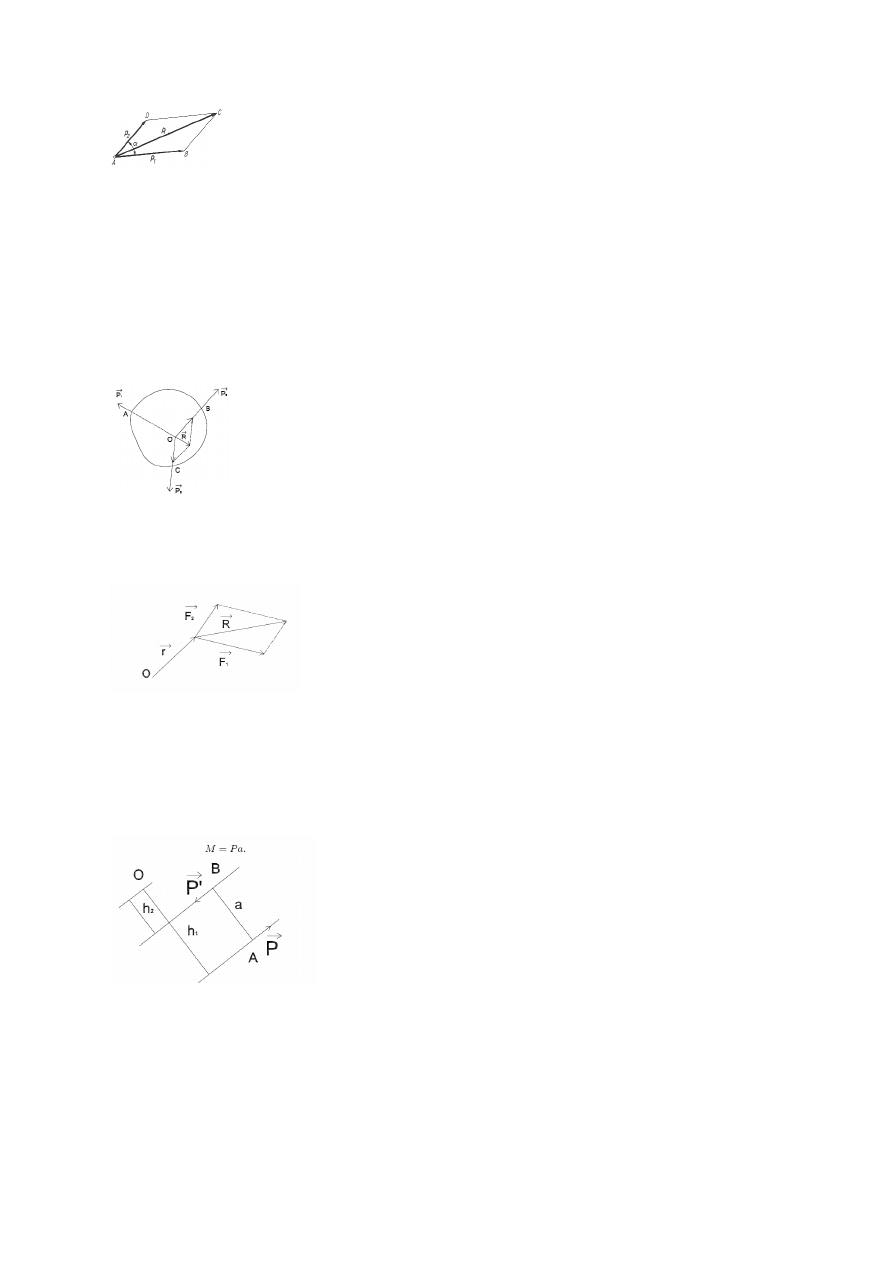
1)Zasada równoległoboku R=P
1
+P
2
2)Dwie siły przyłożone do ciała sztywnego równoważą się tylko wtedy, gdy działają wzdłuż tej samej prostej, są przeciwnie
skierowane i mają te same wartości liczbowe
3)Działanie układu sił przyłożonych do ciał sztywnego nie ulegnie zmianie, gdy do układu dodamy lub odejmiemy dowolny układ
równoważących się sił tzw. układ zerowy
4)Zasada zesztywnienia – równowaga sił działających na ciało odkształcalne nie zostanie naruszona przez zesztywnienie tego ciała
5)Każdemu działaniu towarzyszy równe co do wartości i przeciwnie skierowane wzdłuż tej samej prostej przeciwdziałanie
6)Każde ciało nieswobodne można myślowo oswobodzić od więzów, zastępując przy tym ich działanie odpowiednimi reakcjami.
2.
Twierdzenie o trzech siłach
Aby 3 nierównoległe do siebie siły działające na ciało sztywne były w równowadze, linie działania tych sił muszą się przecinać w
jednym punkcie, a same siły tworzyć trójkąt zamknięty.
3.
Twierdzenie Varigonon
Moment względem dowolnego punktu O wypadkowej dwóch sił równy jest sumie momentów sił wypadkowych względem tego
punktu.
= × gdzie = +
4.
Para sił
Układ dwóch sił równoległych
′
= − ,
′
= nie leżących na jednej prostej Aby pary sił działające w jednej płaszczyźnie
znajdowały się w równowadze, suma momentów tych par musi być równa zeru.
+
′
= ℎ − ℎ =
=
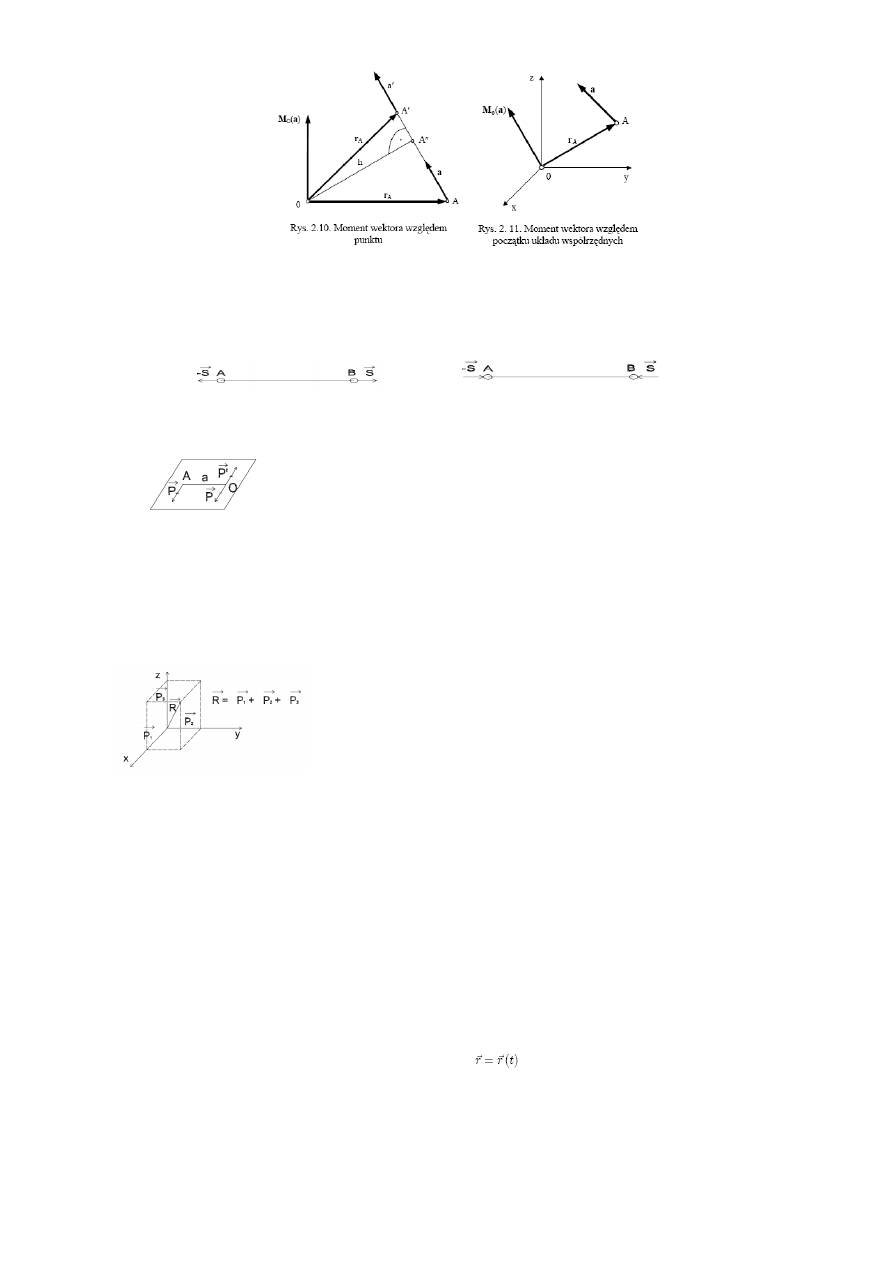
5.
Moment siły
Momentem wektora a względem punktu (bieguna) O nazywamy iloczyn wektorowy wektora r
A
= OA o początku w punkcie O i końcu w
początku wektora a przez wektor a. Moment wektora względem punktu będziemy oznaczać w następujący sposób
M a = r × a
Wektor momentu pary sił jest wektorem swobodnym. Jeżeli mamy n par sił działających na ciało w jednej płaszczyźnie, to moment
wypadkowy jest równy sumie momentów poszczególnych par.
6.
Kratownice
Jest to układ złożony z prętów połączonych przegubowo, mający niezmienną postać geometryczną. Warunek sztywności p=2w-3; Przy
rozwiązywaniu kratownicy w prętach siły w prętach zakłada się następująco:
rozciąganie:
ściskanie
7.
Redukcja płaskiego układu sił
Dana siła . Do dowolnego punktu O ciała przykładamy układ zerowy.
′
= − Otrzymujemy układ:
siła , para sił o momencie M
O
= aP
8.
Redukcja przestrzennego dowolnego układu sił
dowolny układ sił przyłożonych do jednego punktu zastąpić możemy jedną siłą wypadkową przyłożoną w tym punkcie i równą sumie
geometrycznej sił.
=
9.
Tarcie
zjawisko powstawania sił stycznych do powierzchni styku dwóch ciał. Siły te nazywamy siłami tarcia. Możemy je opisać jako siły
oporu zapobiegające ruchowi, który by powstał gdyby tarcia nie było. Tarcie spoczynkowe (statyczne), występujące między dwoma
ciałami gdy nie przemieszczają się względem siebie. Tarciem ruchowym (kinematyczne)- nazywa się gdy dwa ciała ślizgają się lub
toczą po sobie. Siła tarcia przeciwstawia się wówczas ruchowi.
10.
Kinematyczne równania ruchu punktu
Położenie punktu w przestrzeni określić możemy za pomocą trzech współrzędnych w prostokątnym układzie współrzędnych 0xyz
który traktujemy jako nieruchomy układ odniesienia. W przypadku gdy punkt porusza się czyli zmienia z upływem czasu swe
położenie współrzędne x,y i z tego punktu które oznaczamy przez A, ulęgają również zmianie czyli sa pewnymi funkcjami czasu t.
x=f
1
(t), y=f
2
(t), z=f
3
(t) – równania parametryczne toru punktu lub
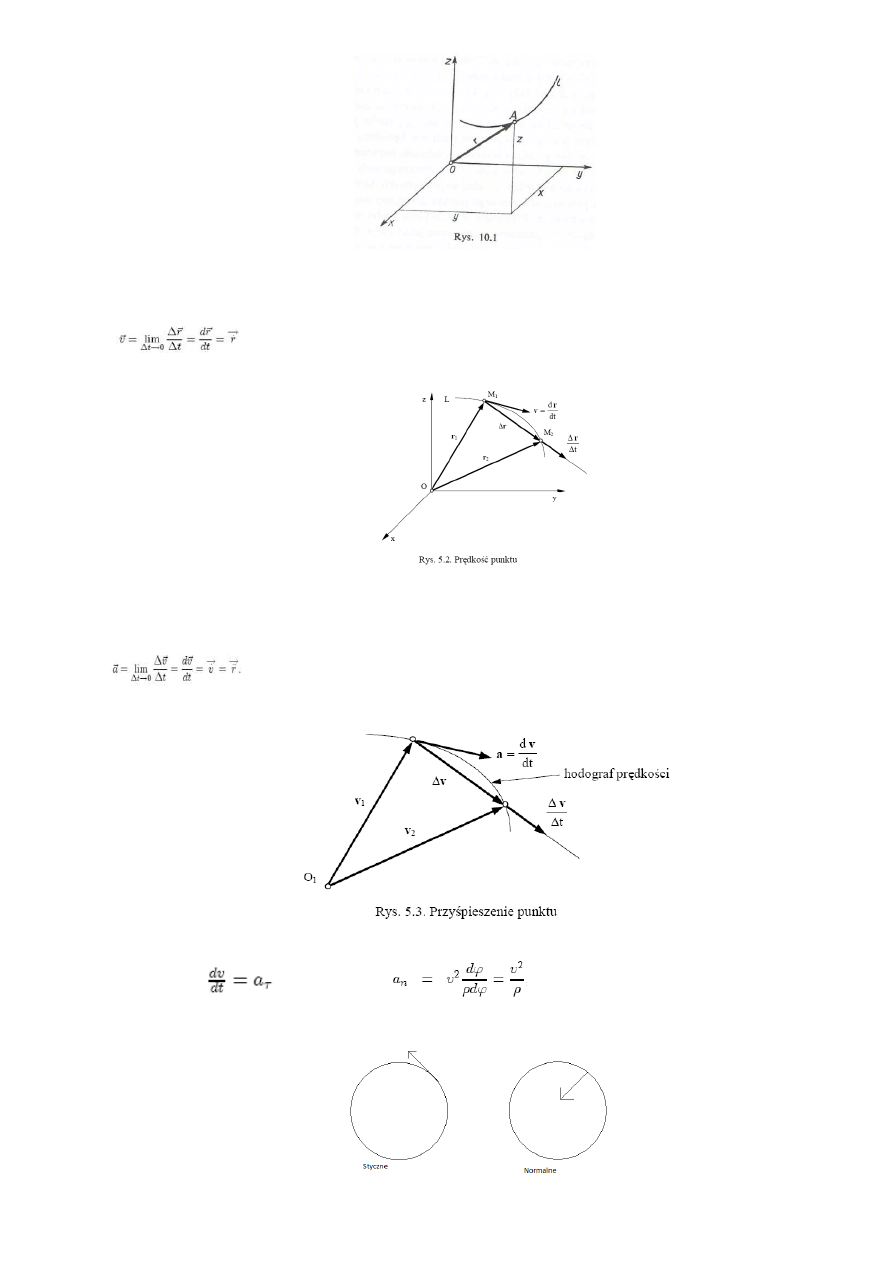
11.
Definicja prędkości
Prędkość punktu jest wektorem określonym przez pierwszą pochodną wektora położenia względem czasu.
12.
Definicja przyspieszenia
Wektor dany przez pierwszą pochodną wektora prędkości lub dugą pochodną wektora położenia
względem czasu
13.
Przyspieszenie styczne, przyspieszenie normalne
przysp. styczne -
przysp. normalne -
, gdzie p- promień krzywizny
14.
Droga
=
Droga to długość odcinka toru (krzywej lub prostej), jaką pokonuje ciało lub punkt materialny podczas swojego ruchu. Droga nie
oznacza odległości pomiędzy dwoma punktami wyznaczającymi początek i koniec ruchu. Liczy się ją po torze ruchu, czyli po
krzywej, po której porusza się ciało. Droga jest sumą dróg przebytych przez ciało w nieskończenie małych odcinkach czasu dt, co
wyraża wzór
15.
16.
17.
18.
Rodzaje ruchów bryły
Ruch postępowy- jeżeli bryła porusza się tak że jej chwilowe położenia są równoległe do położenia początkowego.
Ruch obrotowy- Jeżeli dwa punkty bryły są stałe, tworzą wtedy oś obrotu bryły
Ruch płaski -taki ruch, w którym tory wszystkich punktów bryły są równoległe do pewnej płaszczyzny nazywanej płaszczyzną ruchu.
Ruchem kulistym nazywamy taki ruch bryły, w czasie którego jeden z punktów z nią związanych jest nieruchomy.
19.
Prędkość i przyspieszeni punku bryły w ruchu postępowym
Prędkość: Prędkości wszystkich punktów bryły poruszającej się ruchem postępowym są w danej chwili wektorami równoległymi.
!
=
"
+ #
!
#
!
= 0
Przyspieszenie: Przyspieszenia wszystkich punktów bryły w ruchu postępowym są w danej chwili wektorami równoległymi.
!
=
"
!
=
"
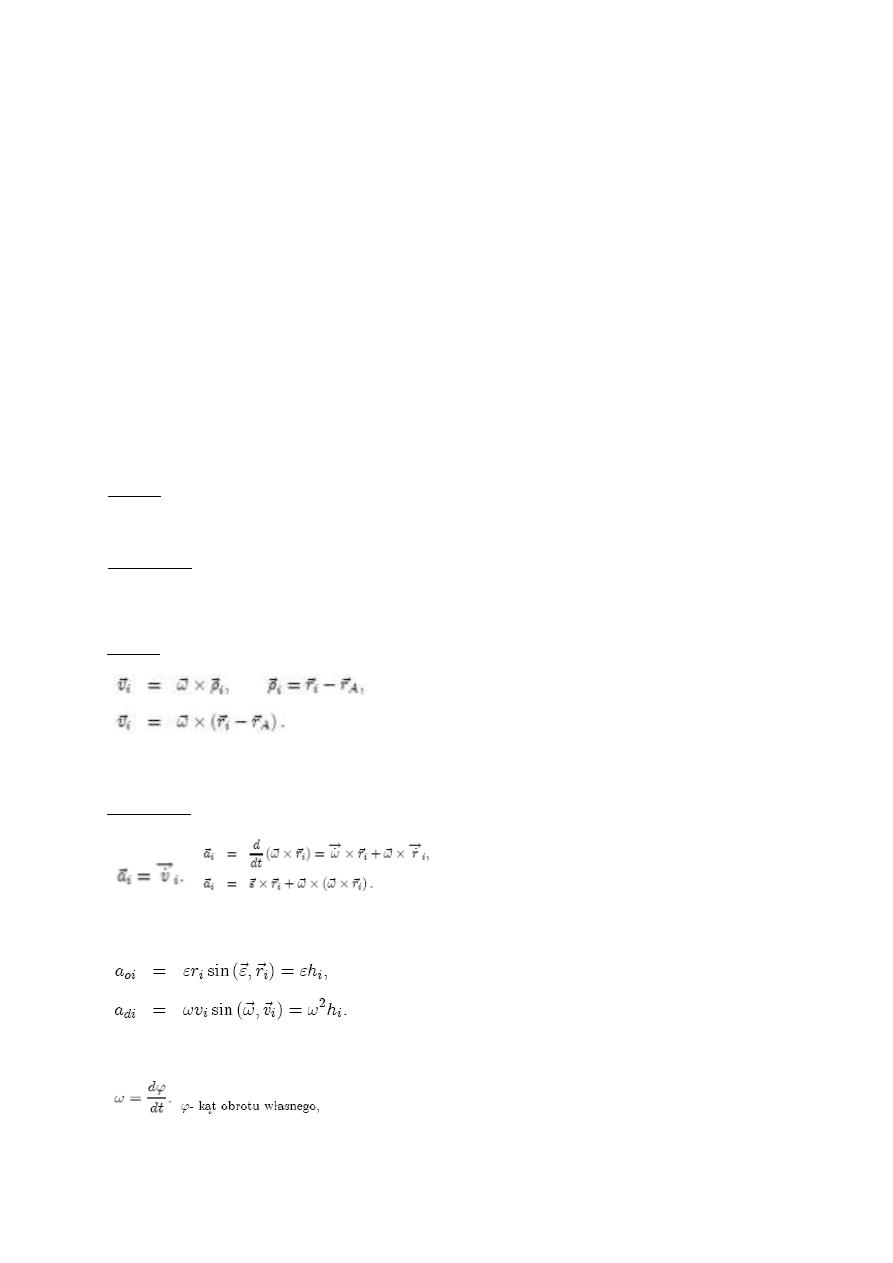
20.
Prędkość i przyspieszenie punktu bryły w ruchu obrotowym
Prędkość:
Prędkość liniowa dowolnego punktu bryły w ruchu obrotowym jest równa iloczynowi wektorowemu wektora prędkości kątowej przez
wektor położenia punktu (początek układu na osi obrotu).
Przyspieszenie:
Całkowite przyspieszenie dowolnego punktu bryły w ruchu obrotowym jest sumą geometryczną przyspieszeń: Obrotowego i do
osiowego
21.
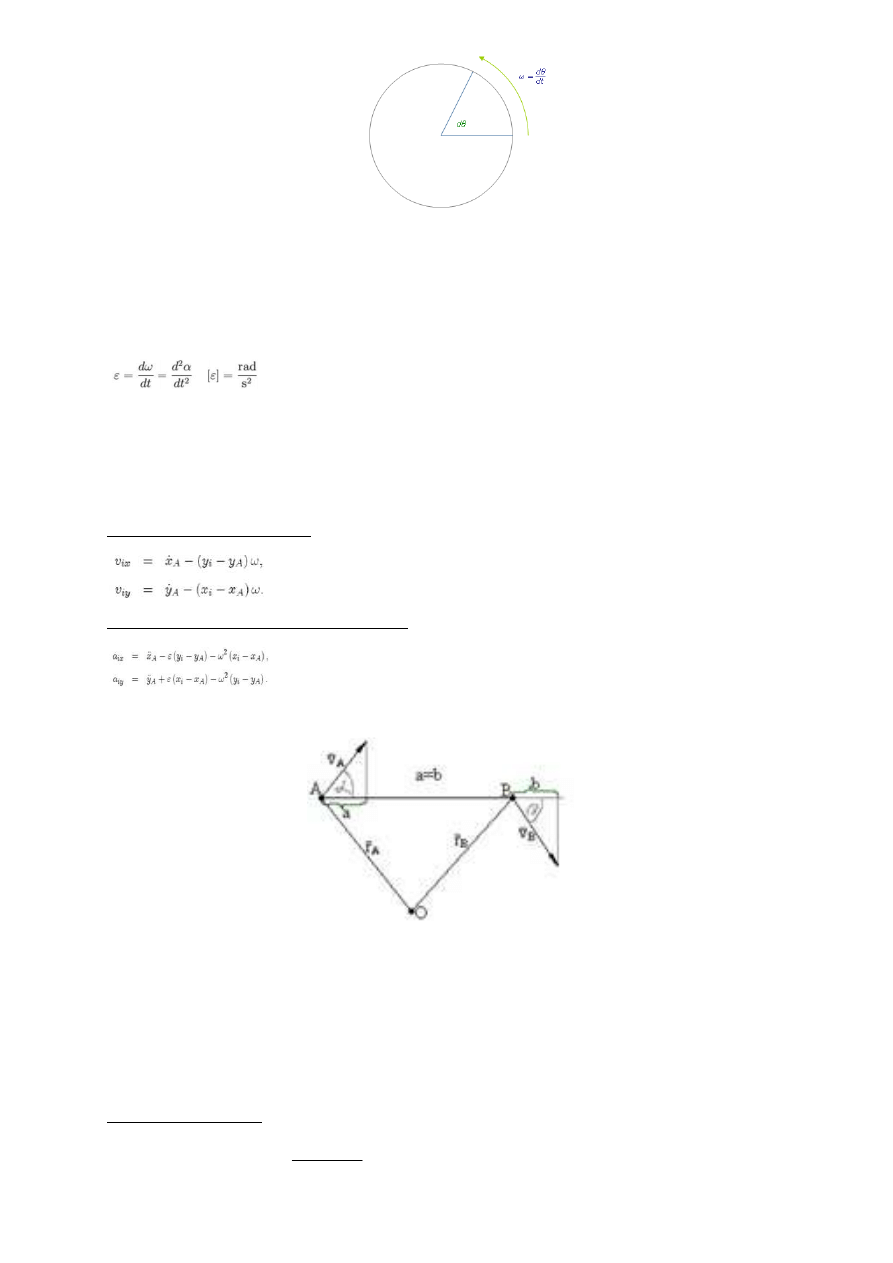
Prędkość kątowa
Prędkość kątowa, wielkość wektorowa opisująca ruch obrotowy ciała, określona wzorem: ω = dθ/dt, gdzie: dθ - elementarny skierowany
kąt płaski opisujący obrót ciała w chwili dt wokół chwilowej osi obrotu.
22.
Przyspieszenie kątowe
jest wektorem leżącym na osi obrotu i skierowanym zgodnie z regułą śruby prawoskrętnej. Jeśli współrzędną kątową ciała określa kąt
α, a wartość prędkości kątowej oznaczymy jako ω, to wartość przyspieszenia kątowego ε wynosi
23. Prędkość liniowa punktu, a prędkość kątowa bryły
Każdy punkt obracającej się bryły ma inną prędkość liniową, natomiast prędkość kątowa wszystkich punktów bryły jest taka sama.
Punkt odległy od osi obrotu o r ma prędkość liniową v.
24. Prędkość i przyspieszenie bryły w ruchu płaskim
Prędkość (sum. Geo.V.pot+V.obrot) :
Przyspieszenie( sum.geo.a post+a.obrot+a.doosiowego)
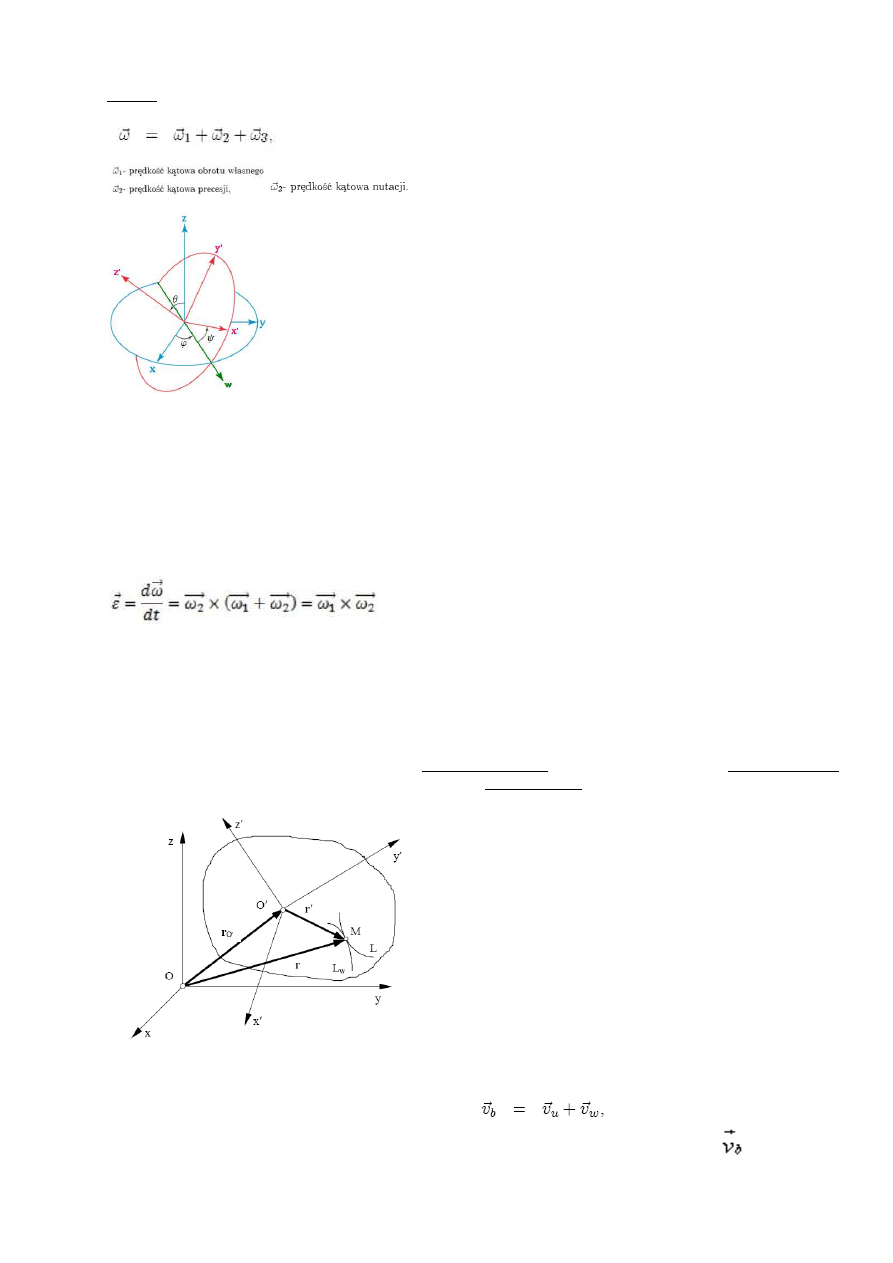
25.Twierdzenie o rzutach prędkości dwóch punktów bryły sztywnej poruszającej się w ruchu płaskim.
Metoda rzutów prędkości – oparta jest na twierdzeniu Charlesa.Twierdzenie Charlesa – w bryle sztywnej podczas dowolnego ruchu, rzuty
wektorów prędkości dwóch dowolnych punktów na prostą łączącą te punkty są sobie równe. vAcosα=vBcosβ
26. Chwilowy środek obrotu
Punkt, którego prędkość w danej chwili jest równa zeru.
Wyznaczenie środka obrotu:
W układzie ruchomym
W układzie nie ruchomym
r
c
'
=
H
w‰n
o'
L
w
2
r
c
= n
o'
+
r
c
'
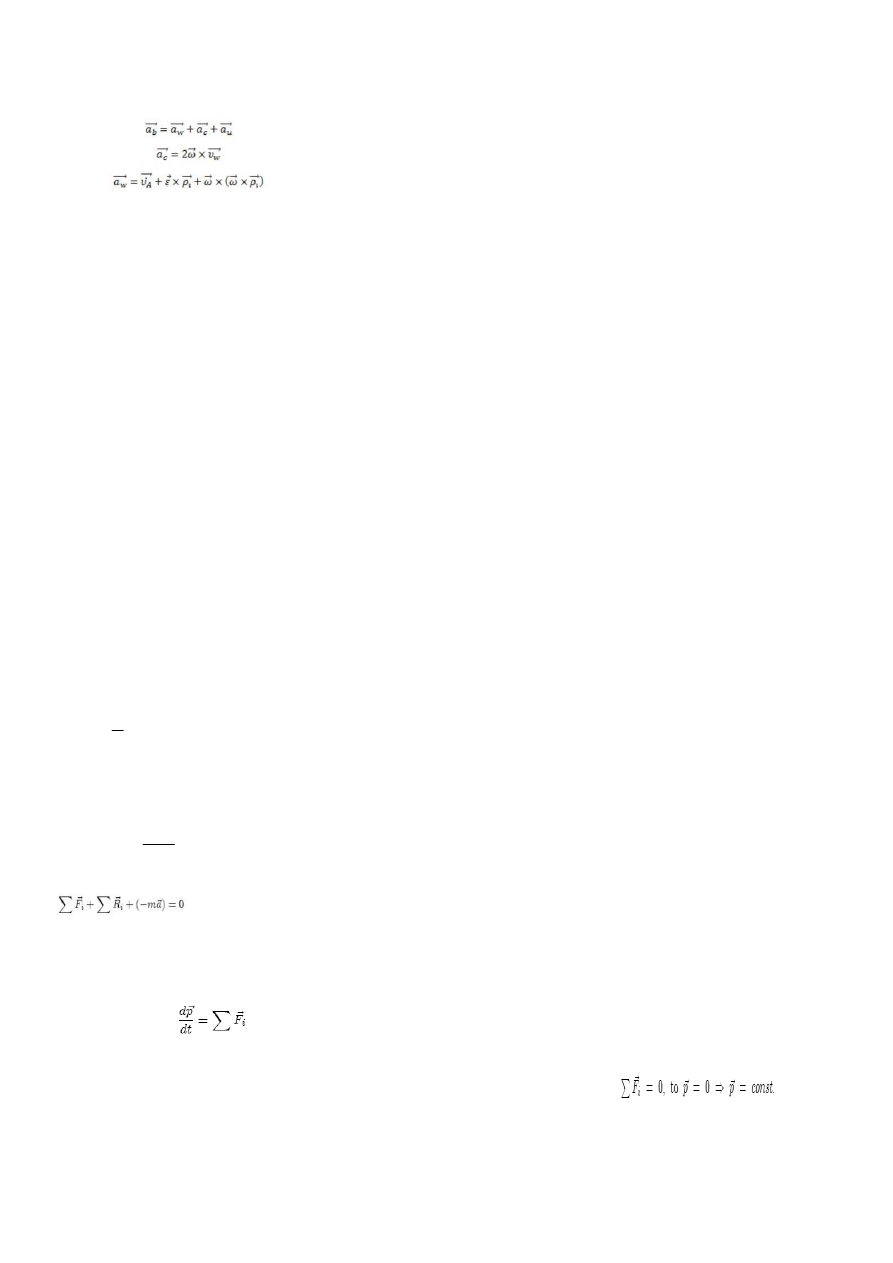
29. Układ Eulera
Prędkość
φ
Kąt obrotu własnego
% Kąt precesji
& Kąt nutacji
31. Przyspieszeni kątowe w przypadku precesji regularnej
Przyspieszenie kątowe występuje w ruchu obrotowym - jest pseudowektorem leżącym na osi obrotu i skierowanym zgodnie z regułą śruby
prawoskrętnej. prędkość kątową oznaczymy jako ω, a wartość przyspieszenia kątowego jako ε
33. ruch złożony punktu
Ruch punktu względem układu nieruchomego nazywamy ruchem bezwzględnym, a względem układu ruchomego ruchem względnym.
Ruch układu ruchomego względem układu nieruchomego nazywamy ruchem unoszenia
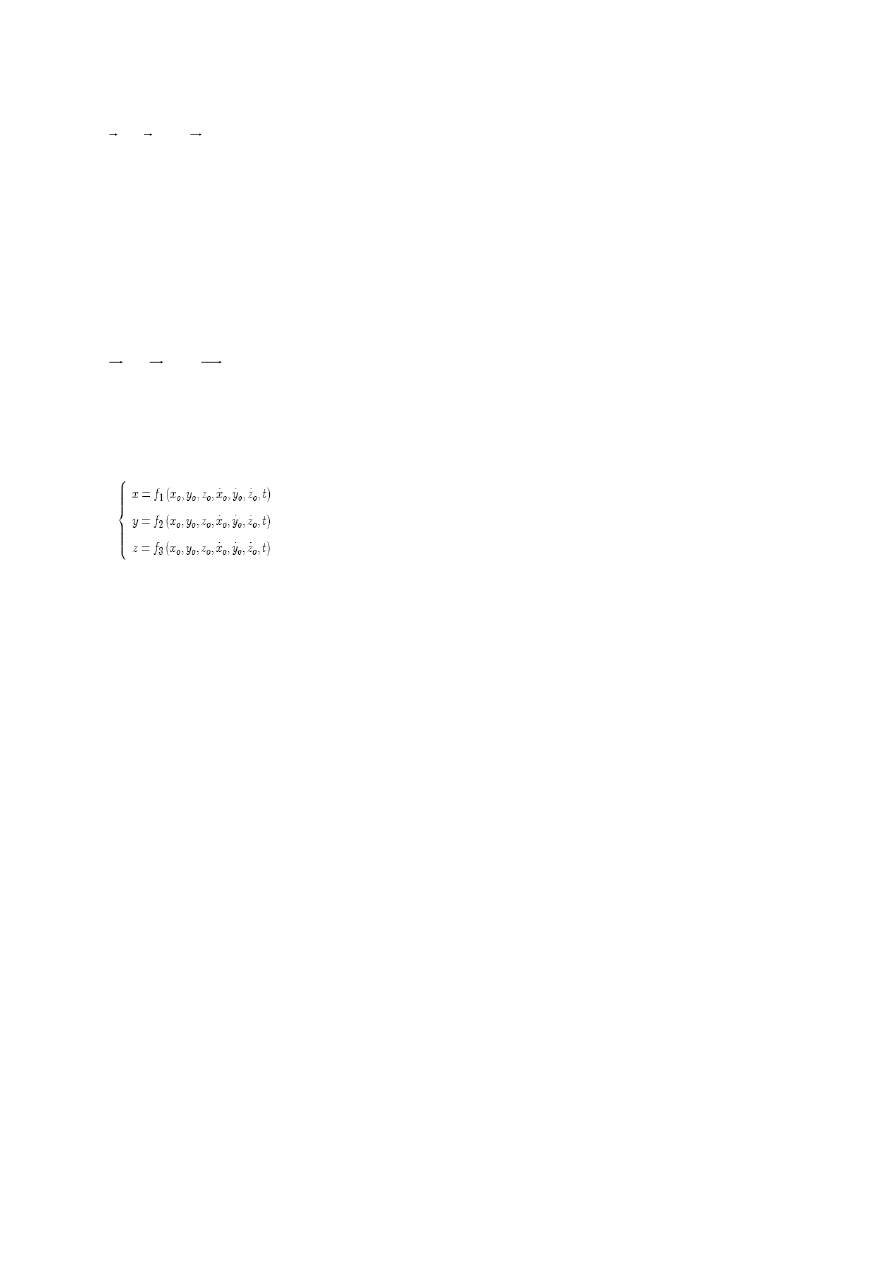
34. Prędkość bezwzględna
Jest wypadkową prędkości unoszenia i prędkości względnej
Prędkość punktu M względem układu
nieruchomego współrzędnych Oxyz nazywamy prędkością bezwzględną (absolutną) i oznaczamy ją symbolem
.
35. Przyspieszenie bezwz
.
Jest sumą wektorową przyspieszenia unoszenia, względnego i przyspieszenia Coriolisa
36. Przyspieszenie Coriolisa
Przyspieszenie Coriolisa
•
związane z ruchem obrotowym ziemi
•
występuje w ruchu złożonym
'
= 2)
*
× +
,
(Przyśpieszenie Coriolisa jest podwojonym iloczynem wektorowym prędkości kątowej i prędkości względnej)
Nie ma przyspieszenia Coriolisa (
'
= 0), gdy nie ma obrotu )
*
= 0, albo +
,
= 0, lub jeżeli )
*
jest równoległy do
+
,
(
)
*
∥ +
,
)
37.
Prawa ruchu Newtona
Prawo pierwsze. Każde ciało trwa w stanie spoczynku lub w stanie ruchu jednostajnego prostoliniowego dopóty, dopóki siły nań
działające tego stanu nie zmienią.
Prawo drugie. Zmiana ilości ruchu (czyli pędu lub impulsu) jest proporcjonalna do siły działającej i ma kierunek prostej, wzdłuż
której ta siła działa. Oznaczając przez P siłę działającą na punkt materialny, a przez mv jego pęd (m - masa, v - prędkość), treść
drugiego prawa Newtona możemy wyrazić następującym równaniem wektorowym F=m*a
Prawo trzecie. Każdemu działaniu towarzyszy równe i przeciwne zwrócone oddziaływanie, czyli wzajemne działania dwóch ciał są
zawsze równe i skierowane przeciwnie.
Prawo czwarte. Jeżeli na punkt materialny o masie m działa jednocześni kilka sił, to każda z nich działa niezależnie od pozostałych, a
wszystkie razem działają tak, jak jedna tylko siła równa wektorowej sumie wektorów danych sił.
Prawo piąte (grawitacji). Każde dwa punkty materialne przyciągają się wzajemnie z siłą wprost proporcjonalną do iloczynu ich mas
(m
1
, m
2
) i odwrotnie proporcjonalną do kwadratu odległości r między nimi. Kierunek siły leży na prostej łączącej te punkty.
W ruchu punktu materialnego układ sił czynnych i reakcji więzów równoważy się z pomyślaną siłą bezwładności.
39. Zasada zachowania pędu:
Równanie:
Wyraża zasadę pędu dla punktu materialnego. Pochodna pędu punktu materialnego jest równa sumie sił działających na dany punkt.
Powyższe równanie jest ogólniejszym sformułowaniem drugiej zasady dynamiki. Jeżeli teraz:
Jest to zasada zachowania pędu dla punktu.
40. Zasada pędu i popędu.
d
dt
=
H
m
n
1
+
m
n
2
...
+
m
n
n
L
=
P
1
+
P
2
+
...
+
P
n
P
=
k
m
1
m
2
r
2
Zasada pędu i popędu (lub inaczej, prawo zmienności pędu) Przyrost pędu układu materialnego w skończonym przedziale czasu jest
równy popędowi wektora głównego sił zewnętrznych działających na ten układ.
∫
=
−
t
dt
W
p
t
p
0
)
0
(
)
(
41. Zasada zachowania krętu.
Pochodna względem czasu krętu ukł. Obliczonego względem pkt. nieruchom S lub wzg. Środka masy równa jest sumie momentów sil
zewn. Działających na układ obliczonych względem pkt S Lub środka masy Ks_=sum(n;i=1) pi_x(mi*vi_)
42. Zasada krętu i pokrętu.
Przyrost krętu układu materialnego względem dowolnego nieruchomego punktu jest równy pokrętowi momentu głównego sił
zewnętrznych względem tego samego punktu.
∫
=
−
t
O
O
O
dt
M
k
t
k
0
)
0
(
)
(
43. Dynamiczne równania ruchu punktu materialnego.
Powstają z podwójnego całkowania
44. Definicja pracy.
Jeśli na jakiś pkt. działa siła P_ i przesuwa się o s_, to mówimy, ze P_ wykonała prace: L=P_*S_=P*s*cosa [J=(kg*m^2)/s^2]
45.
Moc mechaniczna.
Mocą siły nazywamy pracą wykonaną w jednostce czasu. Jeśli praca siły zmienia się z czasem to wówczas moc jest pochodna pracy
względem czasu:
M=dL/dt=P_*dr_/dt=P_*V_
M=P_*v_=P*v*cosa [W=J/s]
46. Zasada równoważności pracy i energii kinetycznej.
Jeżeli na poruszający się punkt materialny o masie m działa siła czynna P to przyrost en. kinetycznej tego punktu jest równy pracy
wykonanej przez siłę działającą na ten punkt: L=1/2mV
2
k
- 1/2mV
2
p
47. Zasada równoważności pracy i energii potencjalnej. [Do zrobienia]
48. Potencjalne (zachowawcze) pole sił
Pole zachowawcze (pole sił zachowawczych, pole potencjalne) – takie pole sił, w którym praca wykonywana podczas przesuwania
jakiegoś ciała nie zależy od toru, po którym porusza się ciało, a jedynie od jego położenia początkowego i końcowego. Polem
zachowawczym jest np. pole grawitacyjne i pole elektryczne.
Wyobraźmy sobie, że na parapecie okna na drugim piętrze stoją dwie identyczne rośliny w doniczkach. Jedna z nich została
przywieziona windą a druga wniesiona po schodach. Nagle doniczki zaczynaja spadać, w tym samym momencie. Która będzie miała
większą energię kinetyczną, gdy osiągnie chodnik? Nie będzie żadnej różnicy. Dlaczego? Ponieważ wartość energii na danej
wysokości nie zależy od toru, po którym wniesiono donice
49. Twierdzenie o ruchu środka masy układu punktów materialnych.
, gdzie
∑
F
-R,
∑
W
=0
0
2
2
2
2
Mr
dt
d
mr
dt
d
∑
=
; Mr
0
’’=R
Ruch układów punktów materialnych odbywa się tak jakby cała masa układu skupiona była w jego środku masy i na który to punkt
działają wszystkie siły zewnętrzne.
→ →
M ro = R
50. Pęd układu punktów materialnych.
R
MV
dt
d
=
0
; Q=MV
0
=
∑
mV
- pęd ukł. Punktów materialnych;
R
dt
dQ
=
- zasada pędu
Na pęd ma tylko wpływ siła zew, a nie wew.
R=0 >> Q=const
Jeżeli jedno ciało zyskuje pęd to drugie też go zyskuje lecz z przeciwnym znakiem.
Pęd dotyczy tylko ruchu postępowego, nie obrotowego, bo nie ma masy, bezwładności, prędkości kątowej.
Zasada zachowania pędu:
Jeżeli na układ nie działają siły lub działające siły się znoszą to pęd jest stały, czyli zachowany R=0 to Q=const. Określa się go tylko
przy ruchu postępowym, przy ruchu obrotowym nie istnieje.
51. Kręt układu punktów materialnych.
K
s
=
∑
ρ
i
*mV
i
– kręt
c
c
M
dt
dK
=
Zmiana krętu ukł. punktów mat. W czasie wywołana jest przez moment główny działający na układ brany względem nieruchomego
punktu lub środka masy.
M
c
=0 >> K
c
=const
52.
Energia kinetyczna układu punktów materialnych.
Energia kinetyczna układu punktów materialnych jest równa sumie energii poszczególnych pkt.
T=sum (mi*vi^2)/2
53. Twierdzenie Koeniga.
Energia kinetyczna układu punktów materialnych równa jest sumie energii kinetycznej, jaką miałby pkt materialny o masie całego
układu, poruszający się z prędkością środka masy oraz energii kinetycznej tegoż układu względem środka masy.
54. Zasada zachowania energii mechanicznej
–
w układzie izolowanym suma składników wszystkich rodzajów energii całości (suma energii wszystkich jego części) układu jest stała
(nie zmienia się w czasie).
55. Wahadło matematyczne
0
sin
"
0
sin
"
sin
"
sin
2
2
=
+
=
+
−
=
−
=
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
l
g
g
ml
ml
mgl
ml
mgl
M
z
56. Wahadło fizyczne
Wahadłem fizycznym nazywamy swobodnie obracające się ciało materialne względem stałego punktu.
0
sin
"
sin
"
sin
=
+
−
=
−
=
⋅
−
=
ϕ
ϕ
ϕ
ϕ
ϕ
g
I
ms
mgs
I
mgs
M
y
F
M
z
z
z
z
Porównując to równanie z wahadłem matematycznym otrzymujemy
ms
I
l
z
red
=
długość zredukowana
Okres wahadła
mgs
I
g
l
g
l
T
z
red
π
π
π
2
2
2
=
=
→
=
Rozwiązanie:
)
cos(
0
ϕ
ω
ϕ
+
=
t
A
57. Drgania swobodne
Aby wystąpiły drgania, punkt musi poruszać się ruchem prostoliniowym pod wpływem siły
F
r
przyciągającej ten punkt do stałego
punktu O zwanego środkiem drgań.
Siła sprężystości jest proporcjonalna do wychylenia punktu
F = -kx, k-stała sprężystości.
Równanie będzie miało postać
mx” = F
mx” = -kx lub
ω
=
=
m
k
x
m
k
x
0
"
Otrzymujemy równanie różniczkowe drgań swobodnych
−
=
=
ω
ω
,
0
"
2
x
x
częstość ruchu.
Otrzymane równanie jest równaniem liniowym, jednorodnym drugiego rzędu. Rozwiązanie:
)
sin(
ϕ
ω +
=
t
a
x
(a-amplituda(max. wychylenie),
ϕ
- faza początkowa ruchu drgań
)
(
ϕ
ω +
t
-faza drgań)
Ruch określony powyższym wzorem jest okresowy o okresie
k
m
T
m
k
T
π
ω
ω
π
2
,
2
=
=
=
58. Drgania tłumione
Drgania tłumione występują w ośrodku stawiającym opór. Siły oporu są proporcjonalne do prędkości
'
*
x
R
x
β
βν
−
=
−
=
-siła tłumiąca.
Równania ruchu:
m
n
m
k
x
nx
x
x
kx
mx
β
ω
ω
β
=
=
=
+
+
−
−
=
2
,
0
'
2
"
'
"
2
Ponieważ równanie charakterystyczne
0
2
2
2
=
+
+
ω
α
α
n
jest kwadratowe, to mogą zajść 3 przypadki(delta większa, mniejsza, równa 0)
1.Małe tłumienie
0
<
∆
⇒
>
n
ω
Rozwiązanie:
)
sin(
2
2
ϕ
ω
+
−
=
−
t
n
ae
x
nt
Jeżeli
0
,
→
∞
→
tox
t
-drgania zanikają. Okres:
2
2
2
2
,
2
n
n
T
t
−
=
−
=
ω
ω
ω
ω
2.Duże tłumienie.
0
>
∆
⇒
<
n
ω
Mamy rozw. rzeczywiste nie będzie drgań. Rozwiązanie
)
sinh(
2
2
ϕ
ω
+
−
=
−
t
n
ae
x
nt
Ruch ten nie jest ruchem okresowym, nie ma drgań.
3.Tłumienie krytyczne
0
=
∆
⇒
=
n
ω
Rozwiązanie:
)
(
2
1
t
C
C
e
x
nt
+
=
−
Brak okresowości, brak drgań.
59. Logarytmiczny dekrement tłumienia
Dekrement tłumienia jest to stosunek dwóch kolejnych amplitud w ruchu tłumionym
gdzie
A
n
- amplituda n-tego drgania,
A
n+1
- amplituda następnego drgania.
Logarytmiczny dekrement tłumienia jest to logarytm naturalny dekrementu tłumienia
60. Drgania wymuszone
Jeżeli na punkt dodatkowo działa siła wymuszająca okresowa to występują drgania wymuszone.
Siła wymuszająca S=H sin(pt),
p-czestość siły wymuszającej.
Równanie ruchu tych drgań
m
H
h
m
k
pt
h
nx
x
pt
H
kx
mx
=
=
=
+
−
−
=
,
)
sin(
'
2
"
)
sin(
"
ω
Rozwiązanie ostateczne tych drgań
)
sin(
)
sin(
2
2
pt
p
h
t
a
x
−
+
+
=
ω
ϕ
ω
Jest to złożenie dwóch drga
2
2
p
h
B
−
=
ω
zależy od częstości drgań wymuszonych.
Jeżeli
∞
→
→
toB
p
,
ω
i występuje rezonans. W przypadku rezonansu rozwi
)
cos(
2
)
sin(
t
t
h
t
a
x
ω
ω
ϕ
ω
+
+
=
61. Rezonans
- zjawisko fizyczne zachodzące dla drgań
amplitudzie przez układ drgający dla okreś
62. Amplituda
- nieujemna wartość określająca wielkość
63. Okres drgań-
dla ruchu periodycznego czas, po jakim układ drgaj
gdzie: f - częstotliwo
gdzie: ω - pulsacja (cz
64. Częstotliwość
określa liczbę cykli zjawiska okresowego wyst
Częstotliwość 1 herca odpowiada występowaniu jednego zdarzenia (cyklu) w ci
w ruchu obrotowym, częstotliwość drgań
wzór:
Gdzie f – częstotliwość, n – liczba drgań
zależności:
,
66. Faza drgań
w fizyce wielkość bezwymiarowa opisują
Dla drgań harmonicznych opisanych równaniem faz drga
67. Faza początkową drgań
Kąt φ nazywa się fazą początkową drgań
71. Reakcje dynamiczne
dynamiczne
reakcje
R
R
const
B
A
_
,
.
−
=
ω
Korzystamy z zasady d’Alemberta
żenie dwóch drgań: własnych i wymuszonych. Widzimy, że ampli
wymuszonych.
puje rezonans. W przypadku rezonansu rozwiązanie drgań będzie miało posta
ce dla drgań wymuszonych, objawiające się pochłanianiem energii poprzez wykonywanie drga
ący dla określonych częstotliwości drgań.
ść przebiegu funkcji okresowej.
dla ruchu periodycznego czas, po jakim układ drgający znajduje się ponownie w takiej samej fazie.
ęstotliwość,
pulsacja (częstość kołowa).
cykli zjawiska okresowego występujących w jednostce czasu. W układzie SI jednostką
1 herca odpowiada występowaniu jednego zdarzenia (cyklu) w ciągu 1 sekundy. Najczęś
ść drgań, napięcia, fali fizyce częstotliwość oznacza się literą f lub greck
liczba drgań, t – czas, w którym te drgania zostały wykonane. Z innymi wielko
bezwymiarowa opisująca procesy okresowe przedstawiająca, w której części okresu znajduje si
harmonicznych opisanych równaniem faz drgań określa się argument funkcji sinus, czyli
drgań, czyli fazą w chwili początkowej t = 0.
że amplituda drgań wymuszonych
dzie miało postać.
pochłanianiem energii poprzez wykonywanie drgań o dużej
ponownie w takiej samej fazie.
cych w jednostce czasu. W układzie SI jednostką częstotliwości jest herc (Hz).
gu 1 sekundy. Najczęściej rozważa się częstotliwość
lub grecką literą ν. Z definicji wynika
czas, w którym te drgania zostały wykonane. Z innymi wielkościami wiążą ją następujące
ęści okresu znajduje się ciało (zjawisko).
Siły odśrodkowe muszą się równoważyć
0
0
0
0
_
2
2
2
2
=
+
=
+
=
+
+
=
+
+
∫
∫
∫
∫
xzdm
l
R
yzdm
l
R
momenty
ydm
R
R
xdm
R
R
sił
równania
Bx
By
By
Ay
Bx
Ax
ω
ω
ω
ω
Oznaczając
∫
∫
∫
∫
=
=
=
=
xz
yz
c
c
D
xzdm
D
yzdm
my
ydm
mx
xdm
,
,
mamy
0
0
0
0
2
2
2
2
=
+
=
+
=
+
+
=
+
+
xz
Bx
yz
By
c
By
Ay
c
Bx
Ax
D
l
R
D
l
R
my
R
R
mx
R
R
ω
ω
ω
ω
2
2
2
2
By
Bx
B
Ay
Ax
A
R
R
R
R
R
R
+
=
+
=
Reakcje znikają tylko wtedy, gdy
0
,
0
,
0
,
0
=
=
=
=
yz
xz
c
c
D
D
y
x
Aby reakcje dynamiczne były równe zeru o
72. Długość zredukowana wahadła fizycznego
Wahadłem fizycznym nazywamy swobodnie obracaj
73. Kręt bryły w ruchu obrotowym
I – moment bezwładności ciała,
– prędkość kątowa.
74. Energia kinetyczna bryły w ruchu obrotowym
,
gdzie:
żyć z siłami reakcji. Równania będą
Aby reakcje dynamiczne były równe zeru oś obrotu musi być centralną główną osią bezwładności
zredukowana wahadła fizycznego
Wahadłem fizycznym nazywamy swobodnie obracające się ciało materialne względem stałego punktu.
Energia kinetyczna bryły w ruchu obrotowym
dem stałego punktu.
- prędkość kątowa,
- tensor momentu bezwładnoś
W przypadku obrotu wokół jednej z osi głównych wyra
,
gdzie:
I - odpowiednim momentem bezwładnoś
ω - prędkość kątowa.
75. Energia kinetyczna bryły w ruchu płaskim
76 Środek masy bryły
Środek masy, punkt określony przez rozkład mas w danym ciele lub
gdzie m
k
i r
k
- odpowiednio masy i promienie wodzą
77. Środek masy układu punktów materialnych
Środek masy określony jest następująco:
Zgodnie z III zasadą dynamiki Newtona
Pi - siły zewnętrzne;
Wi - siły wewnętrzne;
78. Definicja momentu bezwładności
Momentem bezwładności punktu materialnego wzgl
kwadrat odległości tego punktu od płaszczyzny, osi lub bieguna.
I = mr
2
79. Główny moment bezwładności
Momenty bezwładności względem punktu
I
xx
=∫ x
2
dm
I
yy
=∫ y
2
dm
I
zz
=∫ z
2
dm
tensor momentu bezwładności.
W przypadku obrotu wokół jednej z osi głównych wyrażenie na energię kinetyczną w ruchu obrotowym upraszcza si
odpowiednim momentem bezwładności,
Energia kinetyczna bryły w ruchu płaskim
lony przez rozkład mas w danym ciele lub układzie ciał. Położenie środka masy wyraż
odpowiednio masy i promienie wodzące poszczególnych punktowych ciał składających się na dany obiekt.
rodek masy układu punktów materialnych
ę
ąco:
dynamiki Newtona Σ
!
W
!
= 0 ponieważ występują parami.
/
0
→2
3!
→
!
ci punktu materialnego względem płaszczyzny, osi lub bieguna nazywamy iloczyn masy tego punktu przez
ci tego punktu od płaszczyzny, osi lub bieguna.
dem punktu
obrotowym upraszcza się do:
rodka masy wyraża się wzorem:
ę na dany obiekt.
lub bieguna nazywamy iloczyn masy tego punktu przez
Momenty bezwładności względem osi
I
x
=∫ (y
2
+ z
2
) dm = I
yy
+ I
zz
I
y
=∫ (x
2
+ z
2
) dm = I
xx
+ I
zz
I
z
=∫ (x
2
+ y
2
) dm = I
xx
+ I
yy
80. Dewiacyjne momenty bezwładności
Momentem dewiacji (zboczenia) w płaszczyźnie dwóch osi układu współrzędnych karteziańskich jest całka iloczynów mas i ich
odległości od płaszczyzn. Jest on zależny od rozkładu mas i kierunku osi trzeciej.
I
xy
= I
yx
= ∫ xy dm
I
yz
= I
zy
= ∫ yz dm
I
zx
= I
xz
= ∫ zx dm
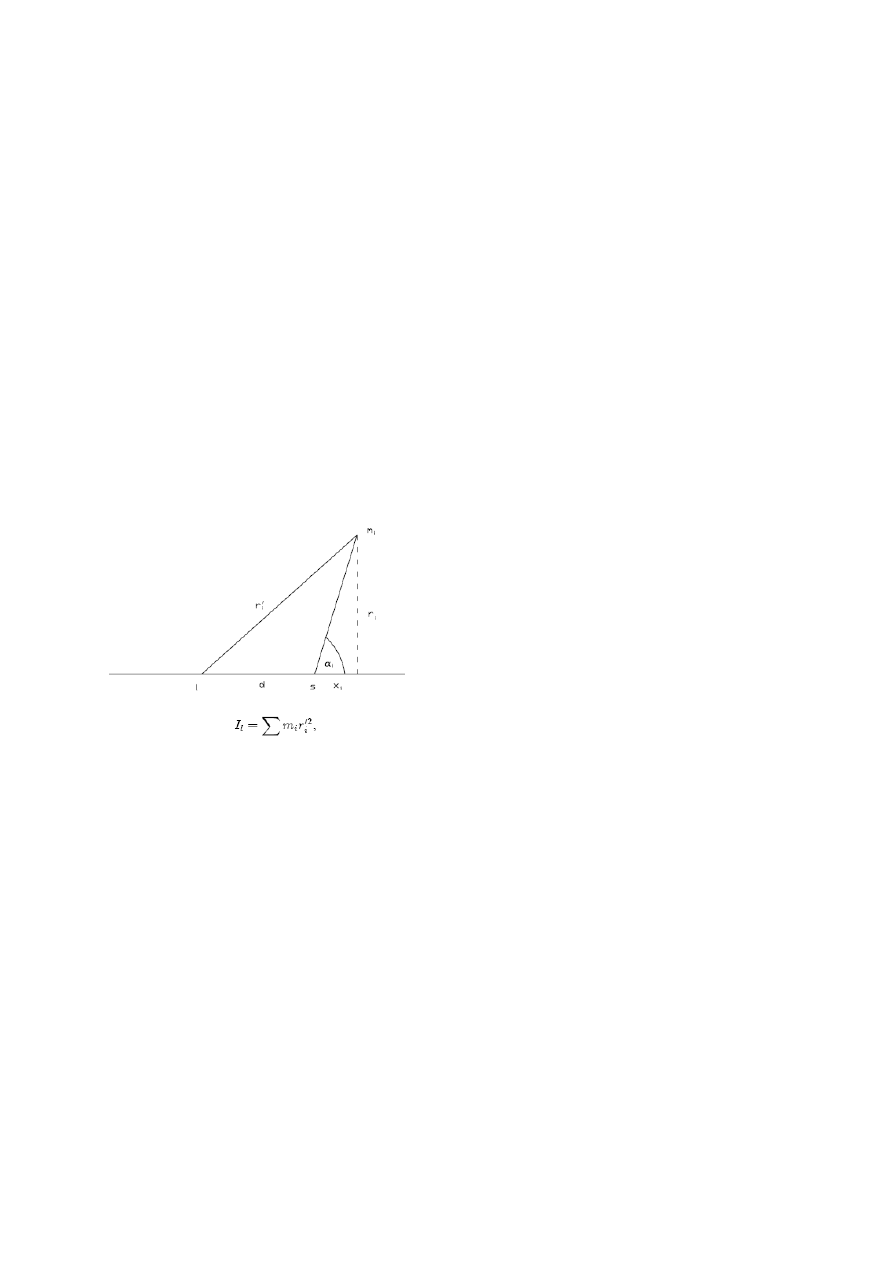
81. Tw. Steinera
Moment bezwładności względem dowolnej osi jest równy momentowi względem osi równoległej przechodzącej przez środek masy
powiększonemu o iloczyn masy całkowitej układu przez kwadrat odległości obu osi.
I
l
= I
s
+ md
2
83. Główna oś bezwładności
Można przyjąć układ współrzędnych taki, ze Dαβ =0. I
1
x
2
+ I
2
y
2
+ I
3
z
2
= k
2
gdzie I
1
,
2
,
3
-główne momenty bezwładności
Takimi osiami są: każda oś symetrii, każda prosta
⊥ do płaszczyzny symetrii, każda prosta, na której leżą środki mas warstw
elementarnych, otrzymanych przez podział ciała płaszczyznami prostopadłymi do tej prostej.
84. Centralna oś bezwładności-Centralnym momentem bezwładności
bryły nazywamy moment względem osi przechodzącej przez środek masy bryły sztywnej. Każda bryła ma taką centralną oś obrotu,
względem której moment bezwładności ma największą wartość oraz oś do niej prostopadłą, względem której moment bezwładności
jest najmniejszy. Osie te nazywają się głównymi osiami momentu bezwładności. Trzecią osią główną jest oś do nich prostopadła,
moment bezwładności ma względem niej pośrednią wartość
85. Główna centralna oś bezwładności
Są to osie główne przechodzące przez środek masy

Wyszukiwarka
Podobne podstrony:
EGZAMIN MT
mechanika egzamin MT-2011-06-20-termin1
mechanika egzamin MT-2011-07-05-termin2
mechanika egzamin MT-2011-09-01-termin1
Egzamin MT 2013 06 24 rea
egzamin-mt-1, Polibuda, mechanika
mechanika egzamin, MT 2011 07 05 termin2
Egzamin MT 2013 06 12 red
Egzamin MT 2013 06 12 rea
egzamin-mt-2, Polibuda, mechanika
mechanika egzamin, MT 2011 09 01 termin1
egzamin-mt-3-4-5-6, Polibuda, mechanika
pytania do egzaminu MT
MT-II-Zadania-testowe-egzamin 2014-5 tm
MT I pytania egzaminacyjne Mikulski 2015
MT egzaminy
MT II Zadania testowe egzamin 2014 5 tm
MT II Pytania egzaminacyjne 2014 5 tm
więcej podobnych podstron