
Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
v
INSTRUKCJA OBSŁUGI URZĄDZENIA ARPA HR 3061
FIRMY
KELVIN HUGHES
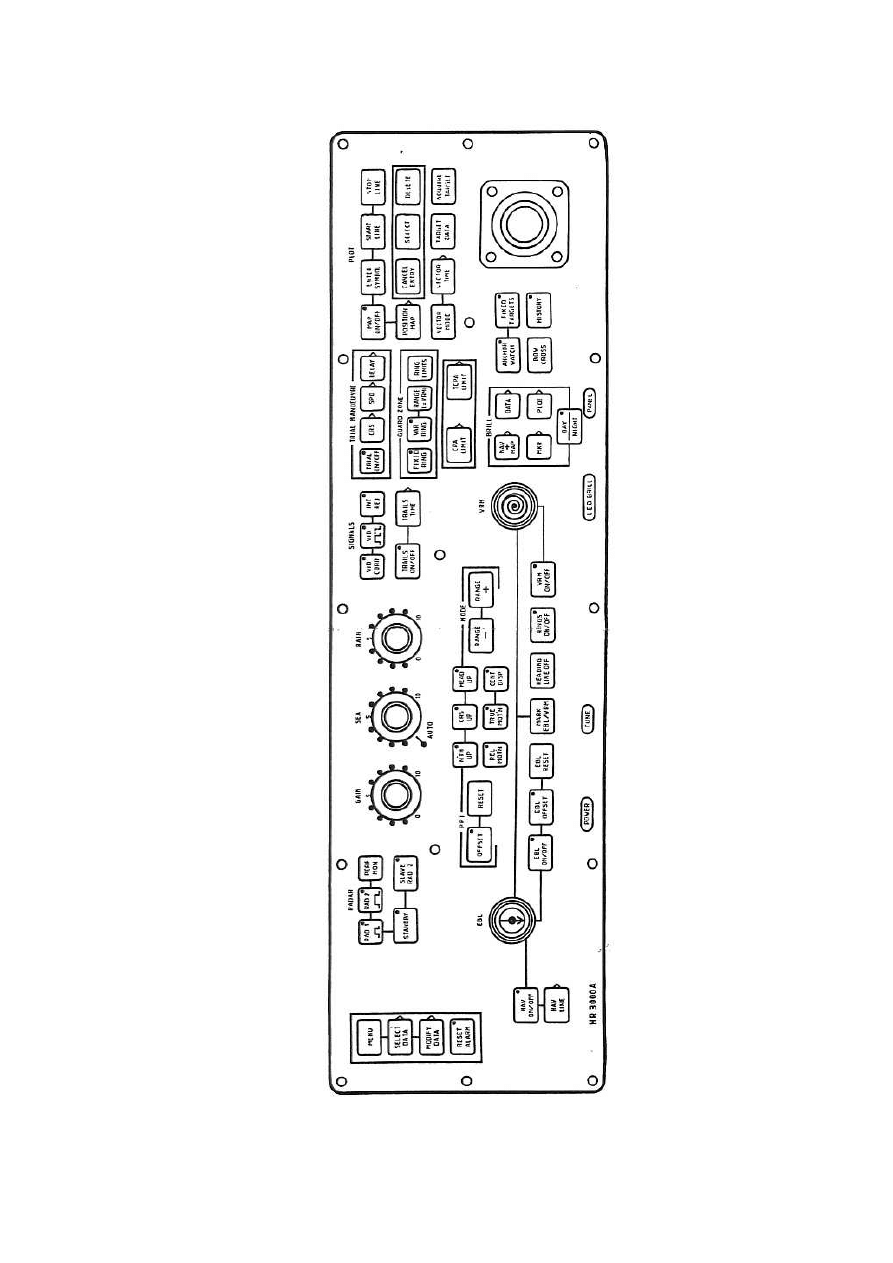
Urządzenie jest produktem brytyjskiej firmy Kelvin Hughes (rys.3.1). Posiada ono
monochromatyczny ekran (kolor zielony), oraz pulpit z przyciskami i pokrętłami funkcyjnymi (rys.
3.2). Internetowa strona producenta: www.kelvinhughes.com
Rys. 3.1. Wskaźnik radarowy Kelvin Hughes HR3061.
Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
vi
Rys.3.2. Rozkład przycisków na pulpicie.
Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
vii
1.
Uruchomienie radaru.
Uwaga: w symulatorze wszystkie radary pracują w trybie SLAVE i są podłączone do jednego
urządzenia pracującego jako MASTER (symuluje go komputer PC na stanowisku instruktora). Z tego
powodu na urządzeniach nie jest aktywna funkcja strojenia [TUNE] i nie można dokonać zmiany
długości impulsu [RAD1] i [RAD2].
1.1 Sekwencje włączania radaru (SLAVE)
1.
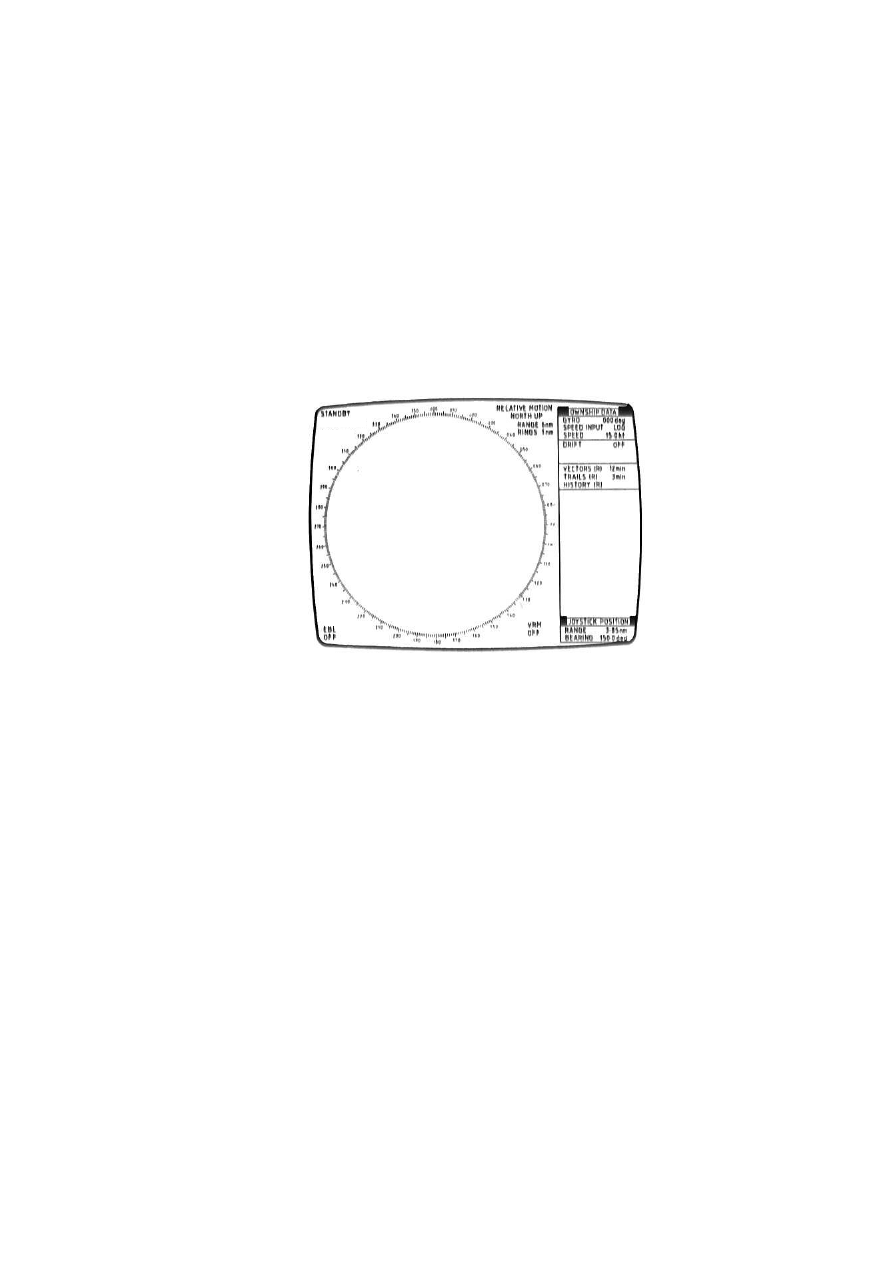
Włączyć radar przełącznikiem zasilania [POWER], znajdującym się na frontowej części
panelu. Urządzenie automatycznie ustawi się w tryb pracy [STAND BY]. Po ok. 10
sekundach na ekranie radaru pojawi się w lewym górnym rogu informacja o statusie
systemu: STANDBY, elektroniczna skala namiarów, pole z funkcjami operacyjnymi danych
statku i urządzenia (rys. 3.3.).
Rys.3.3. Widok ekranu po włączeniu urządzenia na standby
2.
Dostosować jasność diod i podświetlenia pulpitu odpowiednio do warunków oświetlenia
pokrętłami [LED] i [PANEL] znajdujących się na frontowej części pulpitu.
3.
Ustawić kurs żyro zgodnie ze wskazaniami na cyfrowym wskaźniku znajdującym się na
konsoli manewrowej. W tym celu należy:
4.
Wcisnąć i trzymać przycisk [SELECT DATA]
5.
Ustawić kursor [>] w polu danych OWNSHIP DATA na pozycje GYRO za pomocą
joystick’a (przy włączeniu radaru jest to ustawienie domyślne).
6.
Zwolnić przycisk [SELECT DATA]
7.
Wcisnąć i trzymać przycisk [MODIFY DATA] i obracać pokrętło EBL do momentu
właściwego ustawienia kursu – wartość NEW COURSE w okienku menu ALIGN GYRO.
8.
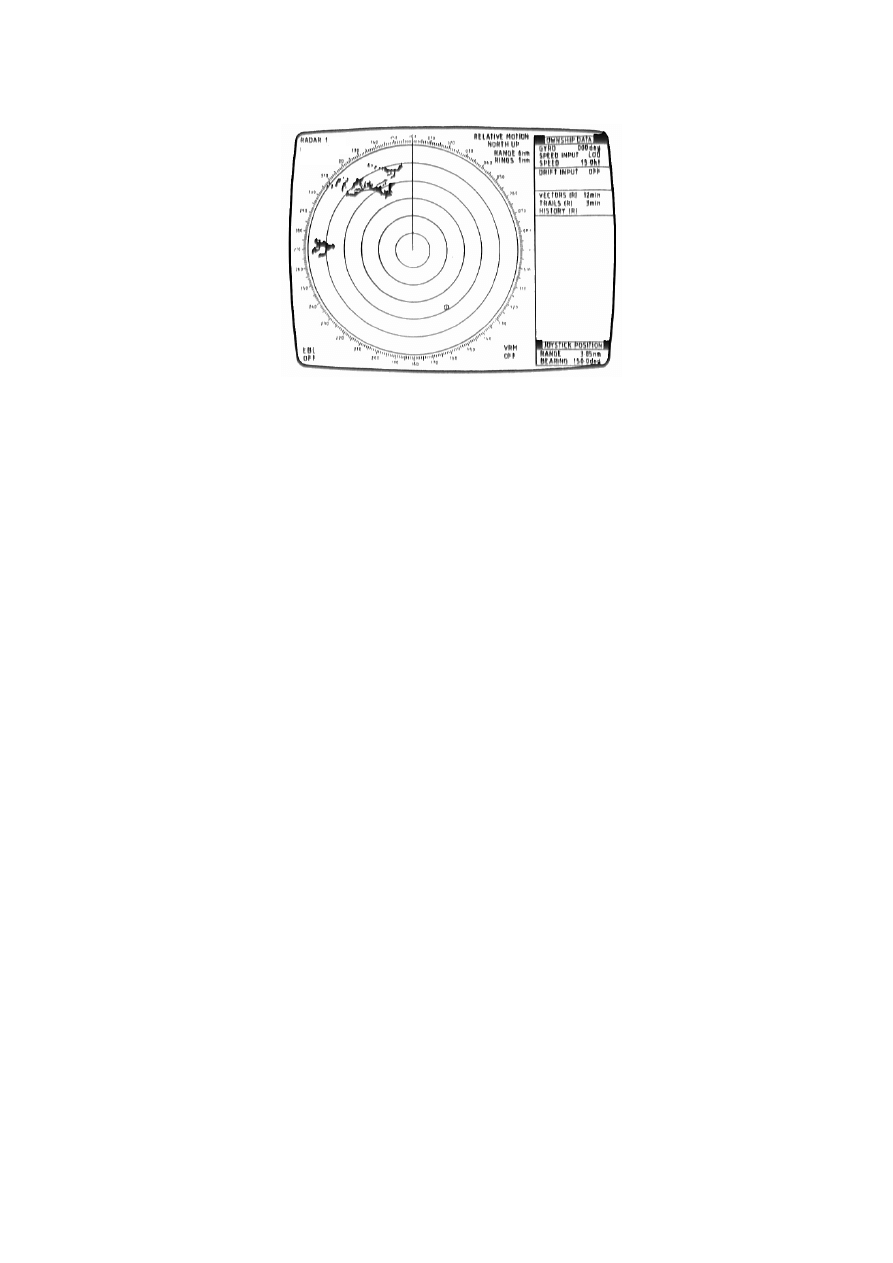
Przełączyć na tryb pracy wciskając [RAD l]. Status systemu powinien zmienić się na
RADAR 1 (SLAVE). Powinna również pokazać się kreska kursowa, kręgi stałe i dane
operacyjne z prawej strony ekranu (rys. 3.4 ).
9.
Ustawić pokrętła GAIN, SEA, RAIN na odpowiednio na wartości 0, 1 i 0. Nie włączać
pozycji AUTO przy pokrętle SEA).
10.
Ustawić odpowiednią jasność pokrętłem [BRILLIANCE] i kontrast pokrętłem
[CONTRAST], które znajdują się pod ekranem radaru.
11.
Ustawić wzmocnienie za pokrętłem [GAIN] do poziomu, przy którym ukazują się na
ekranie szumy własne. Przeważnie jest to nastawa 7.
12.
Dokonać końcowej regulacji obrazu.
Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
viii
Rys.3.4. Widok ekranu po przełączeniu urządzenia na tryb pracy.
1.2
Sekwencje wyłączania radaru:
1. Wcisnąć przycisk
[STAND BY]
2. Po ukazaniu się na ekranie radaru informacji w lewym górnym rogu ekranu o statusie systemu
STANDBY można wyłączyć zasilanie przełącznikiem [POWER], znajdującym się na
frontowej części panelu.
2.
Funkcje obsługi radaru
2.1
Zorientowanie obrazu radarowego
Wyboru zorientowania dokonujemy za pomocą trzech przycisków, które znajdują się w
centralnej części panelu:
•
[N’TH UP] -zorientowanie względem północy
•
[CRS UP] -zorientowanie względem kursu
•
[HEAD UP]
-zorientowanie względem dziobu
2.2
Zobrazowanie obrazu radarowego
Wyboru zobrazowania dokonujemy za pomocą trzech przycisków, które znajdują się w
centralnej części panelu. Są one umieszczone pod przyciskami wyboru zorientowania. Są to:
•
[REL MOT’N] -zobrazowanie obrazu radarowego w ruchu względnym (domyślny środek
zobrazowania znajduje się w środku ekranu, pozycja statku własnego jest stała, echa poruszają
się kursami i prędkościami względnymi).
•
[TRUE MOT’N]
-zobrazowanie obrazu radarowego w ruchu rzeczywistym (domyślny
ś
rodek zobrazowania jest zdecentrowany w kierunku przeciwnym do kursu statku, statek
własny przemieszcza się po ekranie po kursie i z prędkością zgodnymi z sygnałami
dostarczonymi przez żyro oraz log, echa poruszają się kursami i prędkościami rzeczywistymi
).
•
[CD DISP]
-rodzaj zobrazowania obrazu radarowego w ruchu rzeczywistym, (domyślny
ś
rodek zobrazowania znajduje się w środku ekranu, pozycja statku własnego jest stała,
poświaty ech obiektów obcych i statku własnego są malowane jak w ruchu rzeczywistym).
(SLAVE)

Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
ix
2.3
Decentrowanie/centrowanie środka obrazu radarowego
W każdym typie zobrazowania obrazu istnieje możliwość decentrowania i centrowania jego
ś
rodka. Aby zdecentrować środek obrazu należy ustawić marker za pomocą joystic’ka w miejsce
nowej pozycji i wcisnąć przycisk [OFFSET]. Obraz centrujemy wciskając przycisk [RESET].
2.4
Zakresy
Zmiany zakresów dokonujemy za pomocą dwóch przycisków:
•
[RANGE - ]
-zmniejszenie zakresu
•
[RANGE +]
-zwiększenie zakresu
2.5
Kręgi stałe
Kręgi stałe włączamy i wyłączamy przyciskiem [RINGS ON/OFF], który znajduje się w dolnej
części panelu.
2.6
Elektroniczna linia namiarowa i ruchomy krąg odległości
Aby dokonać pomiaru odległości do echa obiektu i namiaru na niego należy włączyć funkcje
[EBL] i [VRM] przyciskami znajdującymi się w centralnej części panelu. Włączenie tych funkcji
sygnalizowane jest diodami. Wartości odległości VRM odczytuje się w prawym dolnym rogu ekranu
,a namiaru EBL w lewym dolnym rogu ekranu. Istnieje możliwość decentrowania EBL za pomocą
markera i przycisku [EBL OFFSET], centrujemy go wciskając przycisk [EBL RESET].
Dodatkowo, pomiary namiaru i odległości możemy dokonywać za pomocą markera
przesuwanego joystick’iem. Wówczas informacje namiaru i odległości podawane są w menu
JOYSTICK POSITION w prawym, dolnym rogu ekranu.
2.7
Sztuczna poświata
Poświatę załączamy wciskając przycisk [TRAILS]. Czas wyświetlania poświaty ustawiamy
joystick’iem po uprzednim wciśnięciu i trzymaniu przycisku [TRAIS TIME]. Widoczna gwiazdka
przy czasie poświaty (*) w oznacza, że jeszcze nie osiągnięto zadanego czasu jej wyświetlania.
W zobrazowaniu ruchu rzeczywistego i centrowanego rzeczywistego poświaty są rzeczywiste, a
w zobrazowaniu ruchu względnego są względne.
2.8
Funkcja „Video Corelation”
Załączenie tej funkcji przyciskiem [VID CORR] zmniejsza jasność świecenia szumów,
zachowując przy tym jasność ech od obiektów. Za szumy przyjmowane są echa, które podczas kilku
obrotów anteny nie znalazły się zbliżonej pozycji względnej – tzn. podczas nowego obrotu pozycja
echa nie pokrywa się w jakiejś części z pozycją poprzednią.
Uwaga:
Obiekty posiadające dużą prędkość względną mogą dawać echa, które nie korelują ze sobą w
kolejnych obrotach anteny. Wówczas są traktowane jako szumy i są malowane z mniejszym
poziomem jasności. Z tego powodu zaleca się wyłączać tą funkcję podczas nawigacji na rzekach i
obszarach podejściowych.
Funkcję wyłączamy ponownie naciskając przycisk [VID CORR].
2.9
Funkcja „Video Signal Enhance”
Załączenie tej funkcji przyciskiem [VID] zwiększa rozmiary ech, co może polepszyć ich
widoczność na ekranie. Funkcja jest aktywna na zakresie 6Mm i więcej. W celu zredukowania
powiększania szumów, echa w odległości 2Mm od pozycji statku własnego nie są powiększane.

Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
x
Funkcję wyłączamy ponownie naciskając przycisk [VID].
3
Obsługa funkcji ARPA
3.1
Alarmy
Komunikaty alarmów ARPA są wyświetlane w okienku ARPA ALARMS, znajdującego się z
prawej strony ekranu. Jest również inicjowany sygnał akustyczny. Potwierdzanie alarmów odbywa się
przez naciśnięcie czerwonego przycisku [RESET ALARMS] znajdującego się w lewej części pulpitu.
Kelvin Hughes HR3061 generuje alarmy typu:
•
NEW TARGET
•
TRACKING OVERLOAD
•
COLLISION WARNING
•
LOST TARGET
•
ANCHOR WATCH
•
SYSTEM FAILURE
W przypadku alarmu COLLISION WARNING, alarm jest generowany gdy wartości CPA i
TCPA śledzonego przez arpę obiektu będą mniejsze od nastaw CPA limit i TCPA limit. Nastawy te
można ustawić przez wciśnięcie [CPA LIMIT] i [TCPA LIMIT] oraz regulacje joystick’iem.
3.2
Akwizycja ręczna obiektów
Echa wprowadzamy do śledzenia za pomocą markera, który naprowadzamy joystick’iem na
obiekt, a następnie naciskamy przycisk [ACQUIRE TARGET] . Po ukazaniu się wektora i jego
stabilizacji informacje o echu można uzyskać naprowadzając na obiekt marker i wciskając przycisk
[TARGET DATA]. Aby wykasować obiekt ze śledzenia należy go wybrać za pomocą markera,
wcisnąć przycisk [SELECT], a następnie wcisnąć przycisk [DELETE]. W celu wykasowania
wszystkich ech ze śledzenia należy jednocześnie nacisnąć przyciski [CANCEL ENTRY] i
[DELETE] .
3.3
Operacje na wektorach
Echa wprowadzone do śledzenia pokazują wektory zgodne z aktualnie wybranym
zobrazowaniem ruchu – są rzeczywiste w ruchu rzeczywistym i rzeczywistym centrowanym, a
względne w ruchu względnym. Aby na chwilę przełączyć rodzaj wyświetlanych wektorów (np. przy
ruchu względnym przełączyć na rzeczywiste) należy nacisnąć i przytrzymać przycisk [VECTOR
MODE]. W celu zmiany długości wektora należy przytrzymać przycisk [VECTOR TIME] i
joystick’iem ustawić żądaną ilość minut.
3.4
Automatyczna akwizycja
Automatyczna akwizycja rozwiązana jest w tym radarze za pomocą dwóch kręgów – stałego i
ruchomego. Krąg stały włączamy wciskając przycisk [FIXED RING], natomiast ruchomy - [VAR
RING]. Istnieje możliwość załączenie tylko kręgu stałego lub stałego i ruchomego. Kształt kręgów
można zmieniać przez zmianę ich rozwartości kątowej, a dla kręgu zewnętrznego możemy dodatkowo
ustawić jego odległość od pozycji statku własnego.
Ustawienie zakresu kątowego (zawsze jest on taki sam dla dwóch kręgów) odbywa się
poprzez ustawienie w żądanym kierunku linii namiarowej [EBL] i naciśnięciu przycisku [RING
LIMITS], natomiast ustawienie odległości kręgu zewnętrznego poprzez ustawienie ruchomego kręgu
odległości [VRM] na żądanej wartości i naciśnięcie przycisku [RANGE (=VRM)].

Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
xi
3.5
Manewr próbny
Manewr próbny służy do zaplanowania manewru statku własnego w celu uniknięcia zderzenia
lub nadmiernego zbliżenia z obiektem wraz z kontrolą jego ewentualnych skutków. Planując manewr
zakładamy, że pozostałe obiekty nie zmienią w tym czasie swoich parametrów ruchu.
Włączenie manewru próbnego odbywa się za pomocą przycisku [TRIAL ON/OFF].
Następnie możemy planować swój manewr zmieniając wartość:
•
czasu do jego wykonania
•
kursu
•
prędkości .
Wartości tych parametrów zmienia się joystick’iem trzymając wciśnięty odpowiedni przycisk:
[DELAY] – zmiana czasu, [CRS] – zmiana kursu, [SPD] – zmiana prędkości. Efekty manewru będą
obserwowane z małym opóźnieniem na ekranie. Echa, które przy założonym manewrze wciąż będą
echami niebezpiecznymi będą dodatkowo oznaczone trójkątem.
3.6
Historia ruchu obiektu
Funkcję tą włączamy przez przyciśnięcie przycisku [HISTORY], który znajduje się w prawym
dolnym rogu pulpitu. Historia jest wyświetlana dla wszystkich obiektów śledzonych w postaci
czterech znaczników w odstępach co 3 minuty. Historia ruchu obiektu jest rzeczywista w
zobrazowaniu ruchu rzeczywistego i centrowanego rzeczywistego (CD) oraz względna w
zobrazowaniu ruchu względnego.
Funkcję tą wyłączamy przez ponowne naciśnięcie przycisku [HISTORY].
3.7
Stabilizacja obrazu radarowego względem dna
W celu stabilizacji obrazu względem dna należy:
•
Wprowadzić do śledzenia rzeczywiste obiekty stałe (np. boje, stawy),
•
Po ukazaniu się i ustabilizowaniu wektora wybranego obiektu naprowadzić na jego echo
marker joysticka i wcisnąć przycisk [SELECT]
•
Wcisnąć przycisk [FIXED TARGET] – wówczas przy obiekcie powinna pojawić się literka
F
Po tej operacji powinno się uaktywnić okno AUTODRIFT z automatycznie skalkulowanymi
parametrami całkowitego znosu (jego kierunek DRIFT DIR i prędkość DRIFT SPEED).Wektory
rzeczywiste zostaną wówczas przedstawione jako wektory rzeczywiste nad dnem, również w
meldunkach radarowych wartości kursów i prędkości wszystkich obiektów są wartościami nad dnem.
W celu deaktywacji funkcji [FIXED TARGET] na wybranym obiekcie należy:
•
naprowadzić na jego echo marker joysticka i wcisnąć przycisk [SELECT]
•
Wcisnąć przycisk [FIXED TARGET]
Uwaga:
Możemy zadeklarować kilka obiektów stałych, z czego każde echo obiektu nie może
przemieszczać się szybciej niż 10 węzłów.
3.8
Elektroniczne mapy radarowe
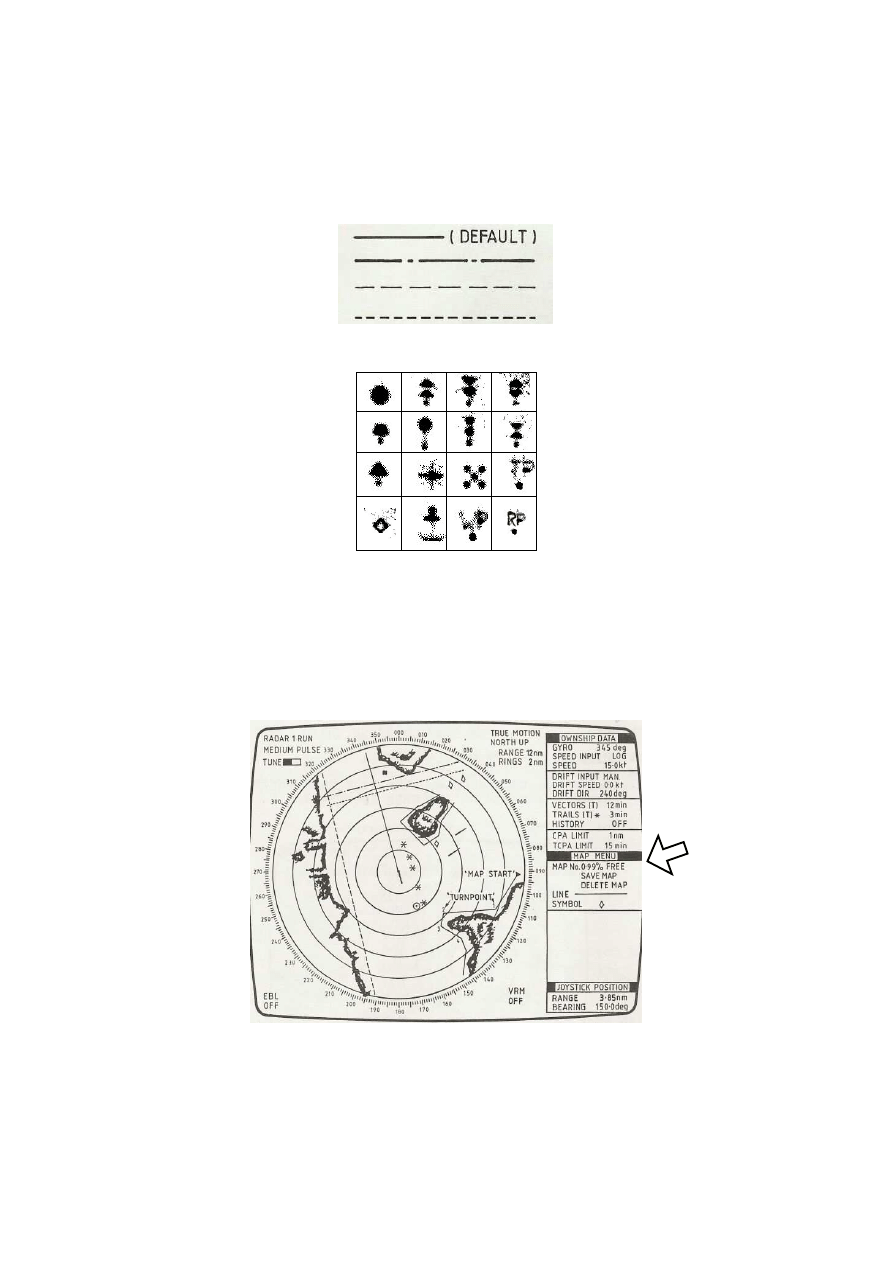
W tym urządzeniu możliwe jest tworzenie map radarowych względnych i rzeczywistych. Każda
mapa może składać się z 64 linii i 128 symboli. W przypadku mapy względnej dostępny jest tylko
jeden rodzaj linii i jeden rodzaj symbolu. W przypadku mapy rzeczywistej dostępne są 4 typy linii i 15
Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
xii
typów symboli przedstawiających podstawowe informacje pokazane na mapie nawigacyjnej (rys. 3.5 i
3.6).
Rys. 3.6 Symbole używane w mapach w radarze Kelvin Hughes HR 3061.
Wszystkie operacje na mapach dokonywane są w menu map. Przyciski używane podczas pracy
z mapami radarowymi znajdują się z prawej strony konsoli.
Aby uaktywnić menu map należy wcisnąć przycisk [MAP ON/OFF]. Dioda na przycisku
zaczyna świecić a z prawej strony ekranu pojawia się MAP MENU (rys. 3.7).
Po MAP MENU można nawigować podobnie jak w innych MENU, a więc za pomocą strzałki.
Wyboru żądanej funkcji dokonuje się za pomocą [SELECT DATA] i joysticka. Zmiany funkcji
dokonuje się za pomocą [MODIFY DATA]. W MAP MENU podawany jest numer ostatnio używanej
mapy oraz informacja o jej rozmiarze w postaci procentowej wielkości zajętej pamięci dostępnej dla
Rys. 3.7. MAP MENU na ekranie radaru
Rys. 3.5. Linie używane do tworzenia map w radarze Kelvin Hughes

Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
xiii
mapy. Wyboru mapy dokonuje się poruszając strzałką z pomocą [SELECT DATA] i joysticka na
numer mapy oraz zatwierdzając wybór przyciskiem [MODIFY DATA]. Spowoduje to przeglądanie
kolejnych map na liście.
Aby stworzyć nową mapę, należy wybrać z MENU mapę, przy której jest wyświetlona
informacja „99% FREE”. Jest to pusta mapa.
Aby wybrać rodzaj linii, należy za pomocą [SELECT DATA] i joysticka wybrać w MAP
MENU opcję LINE i dokonać wyboru wciskając [MODIFY DATA].
Aby rozpocząć nową linię, należy umieścić kursor w pozycji początkowej oraz wcisnąć
przycisk [START LINE]. Wraz z przesuwaniem kursora będzie rysowana linia. Ponowne wciśnięcie
[START LINE] spowoduje zakończenie rysowania pierwszej linii i jednoczesne rozpoczęcie kolejnej
(a więc wierzchołek krzywej łamanej).
Aby zakończyć rysowanie linii, należy wcisnąć przycisk [STOP LINE]. Linia nie jest dalej
rysowana „za” ruchem markera.
Aby wybrać rodzaj symbolu, należy za pomocą [SELECT DATA] i joysticka wybrać w MAP
MENU opcję SYMBOL i dokonać wyboru wciskając [MODIFY DATA].
Aby wstawić symbol, należy umieścić marker w żądanej pozycji i wcisnąć [ENTER
SYMBOL]. Symbol jest wstawiany w pozycji markera.
Aby usunąć element mapy, obojętnie, czy symbol, czy linię należy ustawić na nim marker.
Wcisnąć [SELECT]. Wybrany symbol zacznie migać. Wciśnięcie [DELETE] spowoduje usunięcie
elementu mapy.
Aby edytować element mapy, należy wybrać go za pomocą przycisku [SELECT].
Aby skasować ostatni krok konstrukcji mapy, należy wcisnąć przycisk [CANCEL ENTRY].
Aby zapisać mapę w pamięci, należy za pomocą [SELECT DATA] i joysticka wybrać w
MAP MENU opcję SAVE MAP i zatwierdzić wybór wciskając [MODIFY DATA]. Rodzaj
zobrazowania mapy (True lub Relative) jest zapisywany razem z mapą.
Aby wykasować mapę z pamięci, należy za pomocą [SELECT DATA] i joysticka wybrać w
MAP MENU opcję DELETE MAP i zatwierdzić wybór wciskając [MODIFY DATA].
Pozycjonowanie mapy dokonywane jest za pomocą przycisku [POS’N MAP]. Trzymając ten
przycisk należy z apomocą joysticka przesunąć mapę w żądane połóżenie. Możliwe jest
pozycjonowanie jedynie map rzeczywistych.
3.9
Testowanie
Test poprawności i dokładności obliczeń wykonywanych przez arpę.
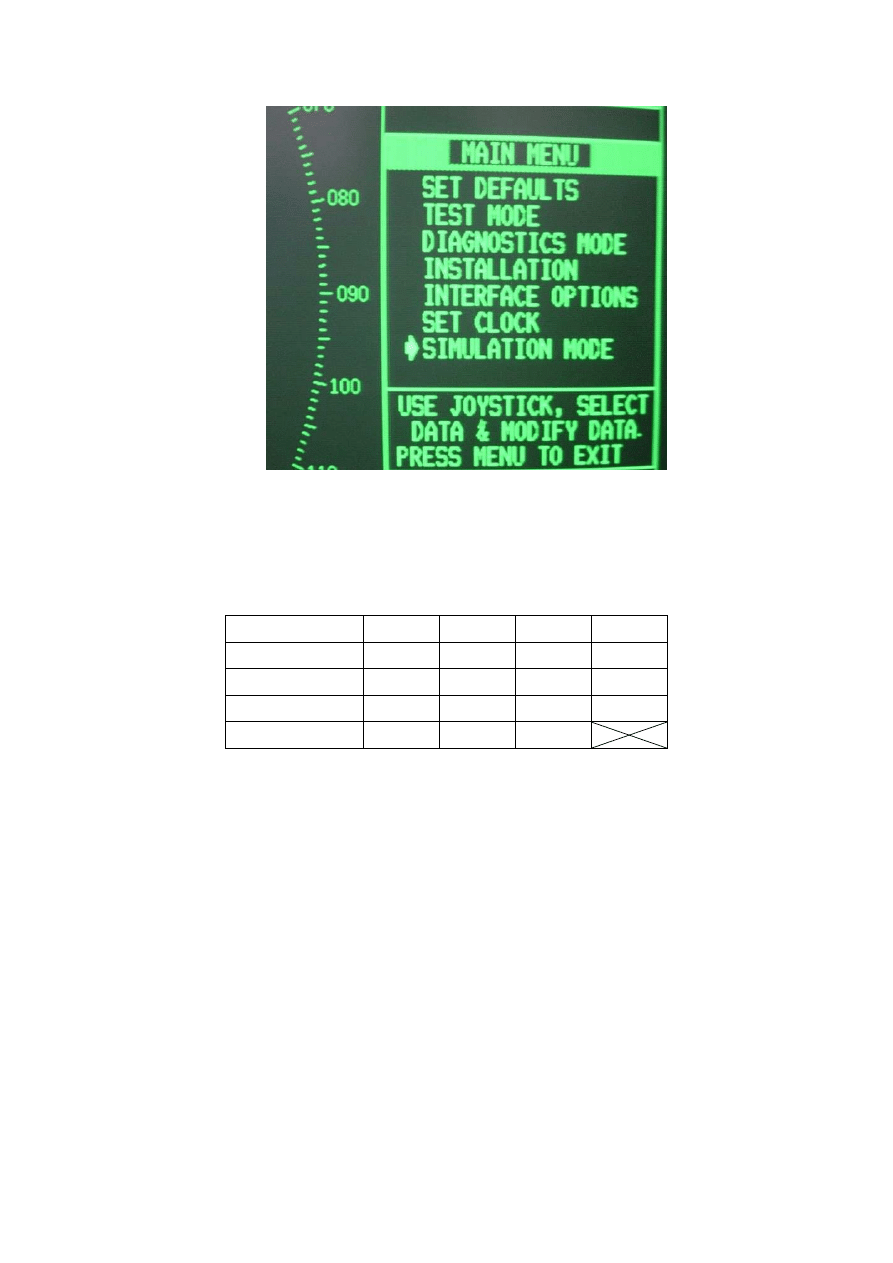
Kelvin Hughes – H.R. 3000, posiada dosyć szeroki zbiór programów testujących. Rys.k 3.8
przedstawia widok Menu głównego.
Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
xiv
Rys. 3.8. Główne Menu urządzenia ARPA KH 3000.
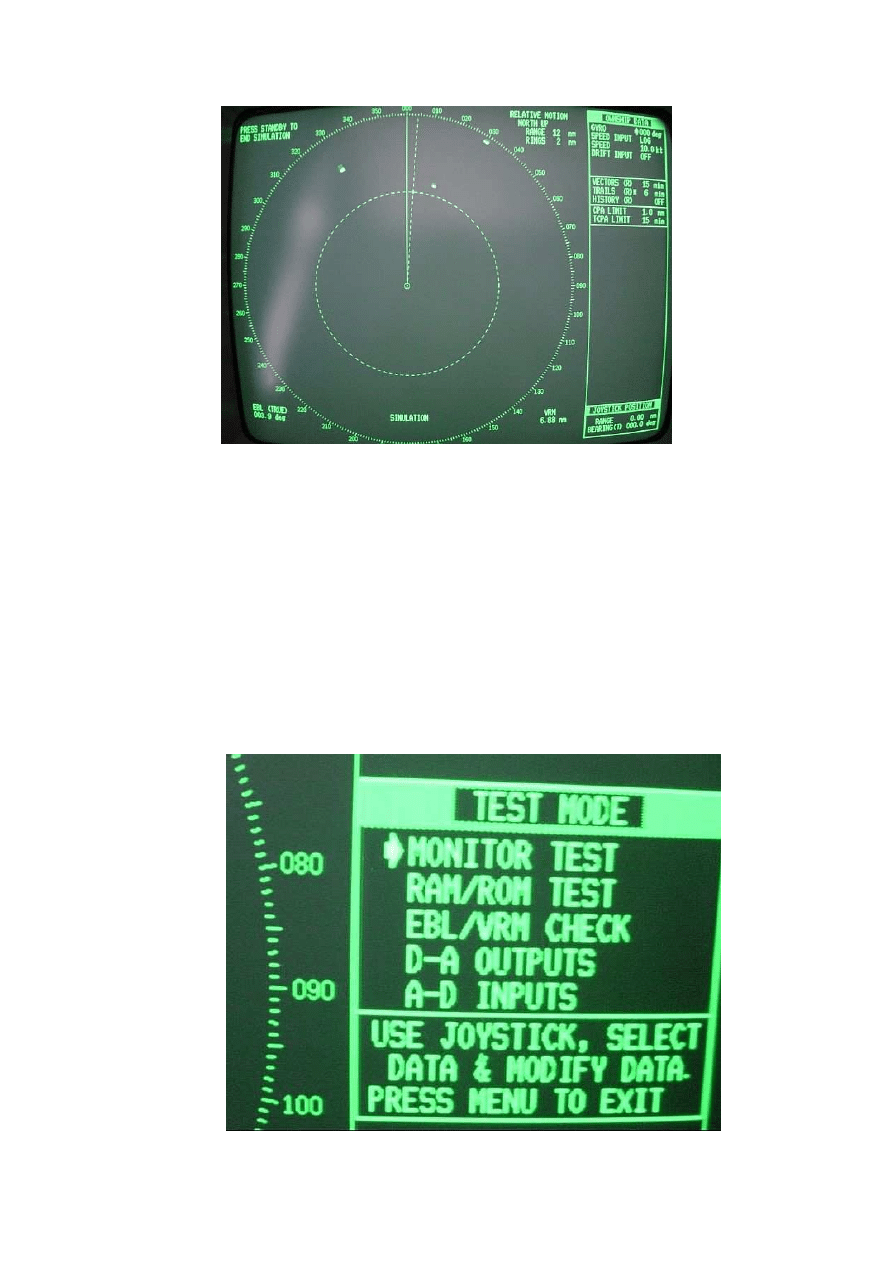
Symulacja treningowo-testowa (rys. 3.9) uruchamiana jest z menu głównego w trybie pracy
ARPA. Na monitorze pojawiają się cztery sztucznie generowane echa, których początkowe położenia
oraz parametry ruchu przedstawia poniższa tabela:
Tabela 3.1: Parametry obiektów generowanych w scenariuszu
testowym w urządzeniu KH HR 3061
Obiekt 1
Obiekt 2
Obiekt 3
Obiekt 4
Odległość (Mm)
10
15
12
7.5
Namiar (°)
330
350
030
015
Prędkość (w)
16
15
12
0
Kurs (°)
130
160
270
Program symulacyjny generuje echa przez okres 60 minut, które poruszają się w promieniu 15
Mm od środka zobrazowania radarowego. Po włączeniu tego testu należy wprowadzić do śledzenia
wszystkie echa i następnie dokonać porównania wyliczonych przez urządzenie parametrów ruchu ech
z tymi zestawionymi w instrukcji obsługi. Należy pamiętać przy tym o czasie niezbędnym do
stabilizacji procesu śledzenia. Po stwierdzeniu znacznych niezgodności należy zgłosić to kapitanowi,
sprawdzić dokładność danych wejściowych z żyrokompasu i logu, jak też zastanowić się, czy nie
byłoby bezpieczniej wykorzystywać urządzenie tylko i wyłącznie jako radar.
Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
xv
Rys. 3.9. Widok ekranu monitora H.R. 3000 w trybie symulacji.
Informowanie operatora o błędach wykrytych w systemie realizowane jest poprzez
wyświetlanie komunikatów po prawej stronie ekranu radarowego. System może sygnalizować brak
wejściowych sygnałów video, żyrokompasu, logu oraz brak kreski kursowej.
Kiedy sprawdzenie stanu bezpieczników, łączy oraz wtyczek nie powoduje usunięcia usterek w
pracy systemu, operator odsyłany jest do publikacji KH 1003 (HR Series Display Servicing
Instructions).
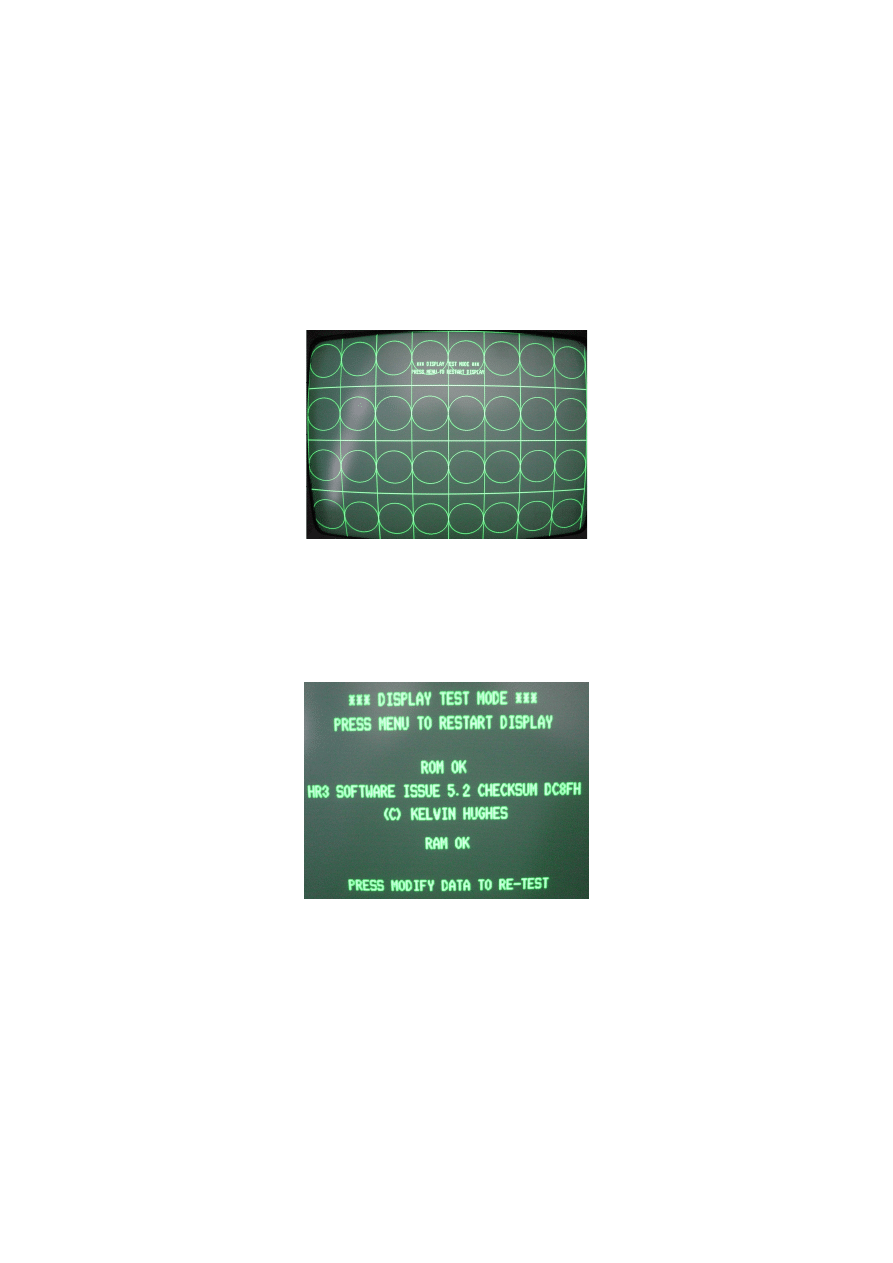
Wewnętrzne testy procesora, pamięci oraz test pracy monitora.
Uruchamianie programów testujących odbywa się w trybie pracy ARPA poprzez wybranie z
menu głównego funkcji test mode. Dostępne są następujące testy (rys. 3.10):
Rys. 3.10. Podmenu TEST MODE urzadzenia KH 1003.
Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
xvi
•
Monitor test – test liniowości pracy monitora;
•
RAM/ROM test – test pamięci RAM/ROM;
•
EBL/VRM check – test EBL/VRM;
•
D – A outputs – test wyjść cyfrowo-analogowych;
•
A – D inputs – test wejść analogowo-cyfrowych.
Uruchomienie testu liniowości pracy monitora spowoduje wyświetlenie na ekranie radarowym
planszy z regularnie rozmieszczonymi okręgami (rys. 3.11).
Rys. 3.11. Test liniowości pracy monitora HR 3061.
Test pamięci RAM/ROM pozwala na kontrolę pamięci systemowej, jak również na
sprawdzenie aktualnej wersji oprogramowania, Na monitorze wyświetlony zostanie status pamięci
(rys. 3.12).
Rys. 3.12. Test pamięci RAM/ROM systemu H.R. 3000.
W funkcji Display test mode operator sprawdza działanie potencjometrów oraz joystick’a
znajdujących się na pulpicie. Nastawom potencjometrów przyporządkowane są odpowiednie wartości
liczbowe wyświetlone na ekranie. Zadaniem operatora jest manipulowanie potencjometrami
wzmocnienia, ZRW, rozróżnialnika oraz strojenia, znajdującymi się na pulpicie sterowania, według
instrukcji podanych na monitorze i sprawdzanie, czy nastawy nie przekraczają wartości podanych na
ekranie. Jeśli nastawy przekroczą podane wartości, operator dokonuje regulacji odpowiednich
potencjometrów (ich nazwy wyświetlone są na ekranie podczas trwania testu), znajdujących się na
płycie głównej.
W menu głównym znajduje się jeszcze tryb diagnostyczny, obsługiwany przez personel
techniczny. Tryb ten wymaga użycia terminala zewnętrznego.

Laboratorium Symulatora Radarowego
Załącznik nr 3 – instrukcja obsługi urządzenia ARPA HR 3061 KH
xvii
Literatura
Kelvin Hughes Ltd., „Operating Instructions for Concept Radar Systems”, Publication KH
1002 (R1), 1990
Wyszukiwarka
Podobne podstrony:
INSTRUKCJA OBSŁUGI URZĄDZENIA ARPA NUCLEUS 6000A
INSTRUKCJA OBSŁUGI URZĄDZENIA ARPA DB2000
instrukcja obsługi urządzenia Trak GPS 530 po polsku
Instrukcja obsługi urządzenie rozruchowe POWERMAT PM PWF 5w1
instrukcja bhp skrocona instrukcja obslugi konserwacji i bhp urzadzen oraz instalacji chlodniczych w
istan Obsługa urzadzeń gastronomicznych, BHP, Instrukcje-Stanowiskowe
Instrukcja czynnościowa użytkowania i obsługi urządzeń, BHP
Instrukcja obslugi i eksploatacji urzadzeń chlodniczych
Instrukcja obsługi i eksploatacji urządzeń chłodniczych
Maszyny i urządzenia w piekarni, BHP, Instrukcje-Obsługi
Kamera DVS 650IR HR Instrukcja Obslugi
Urządzenie do prod. kręgów beton, BHP, Instrukcje-Obsługi
konspekt gospodarstwo domowe, Urządzenia elektryczne w gospodarstwie domowym-rodzaje, czytanie instr
Instruktaż obsługa instalacji i urządzeń elektroenergetycznych
więcej podobnych podstron