Technologia GPS
wykłady z przedmiotu
„Geodezja i kartografia”
Dr hab. inż. Andrzej Kobryń
Informacje ogólne
GPS (Global Positioning System) jest to satelitarny
system nawigacyjny, który w geodezji umożliwia
dokładne wyznaczenie pozycji jednego punktu
względem drugiego.
Warunek:
wykonanie pomiarów odbiornikami GPS jednocześnie na
dwóch punktach (znanym i nieznanym)
Jest to metoda względna.
Wchodzi w grę również metoda względna (absolutna), w
której posługujemy się tylko jednym odbiornikiem.
Nie daje ona jednak możliwości dokładnego
wyznaczenia współrzędnych (jej dokładność to kilka
metrów).
Ogólna charakterystyka systemu GPS
Globalny system wyznaczania pozycji (Global Positioning System):
wyznaczanie pozycji punktów w układzie WGS-84 z początkiem w
centrum mas Ziemi
dokładność wyznaczenia współrzędnych wektorów rzędu 10
-5
-10
-8
D
proces obserwacyjny i obliczeniowy jest całkowicie
zautomatyzowany
Składniki systemu GPS:
segment kosmiczny
segment kontroli
segment użytkowników
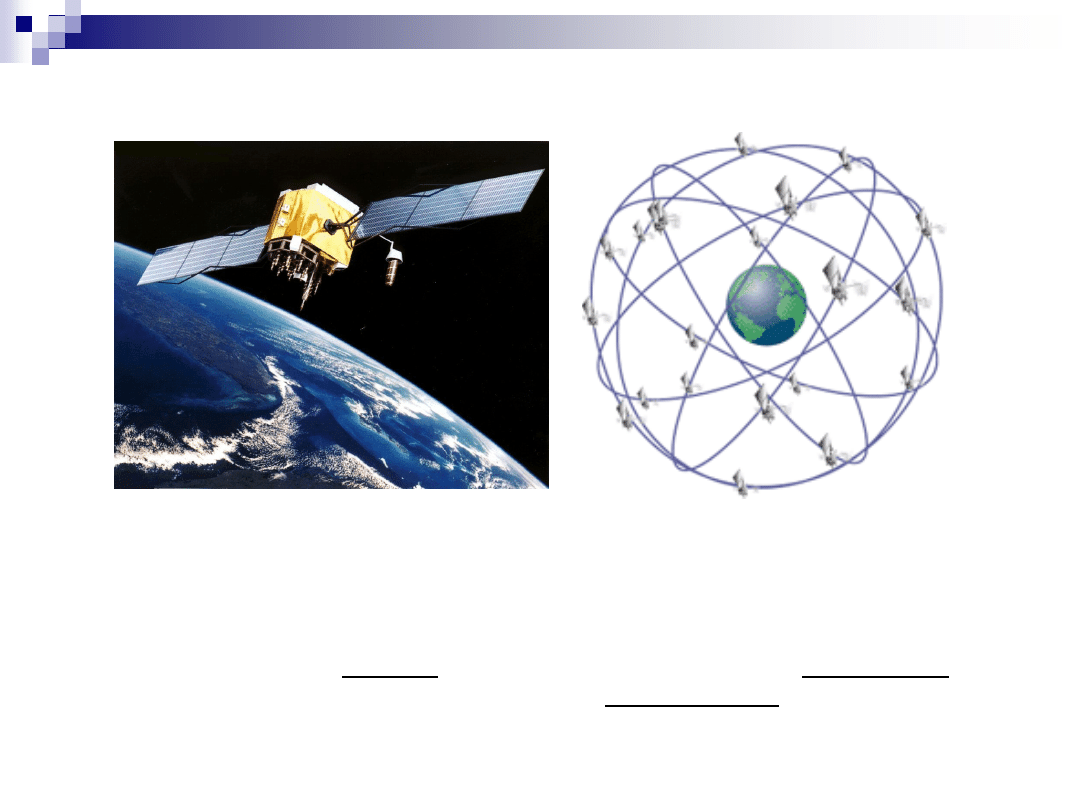
Segment kosmiczny
24 satelity na sześciu kołowych orbitach o nachyleniu 55
o
względem
równika
w każdym punkcie na Ziemi możliwość obserwacji co najmniej
czterech satelitów GPS
każdy z satelitów emituje częstotliwości pomiarowe, transmituje
sygnały czasu własnego zegara oraz retransmituje informacje
efemerydalne
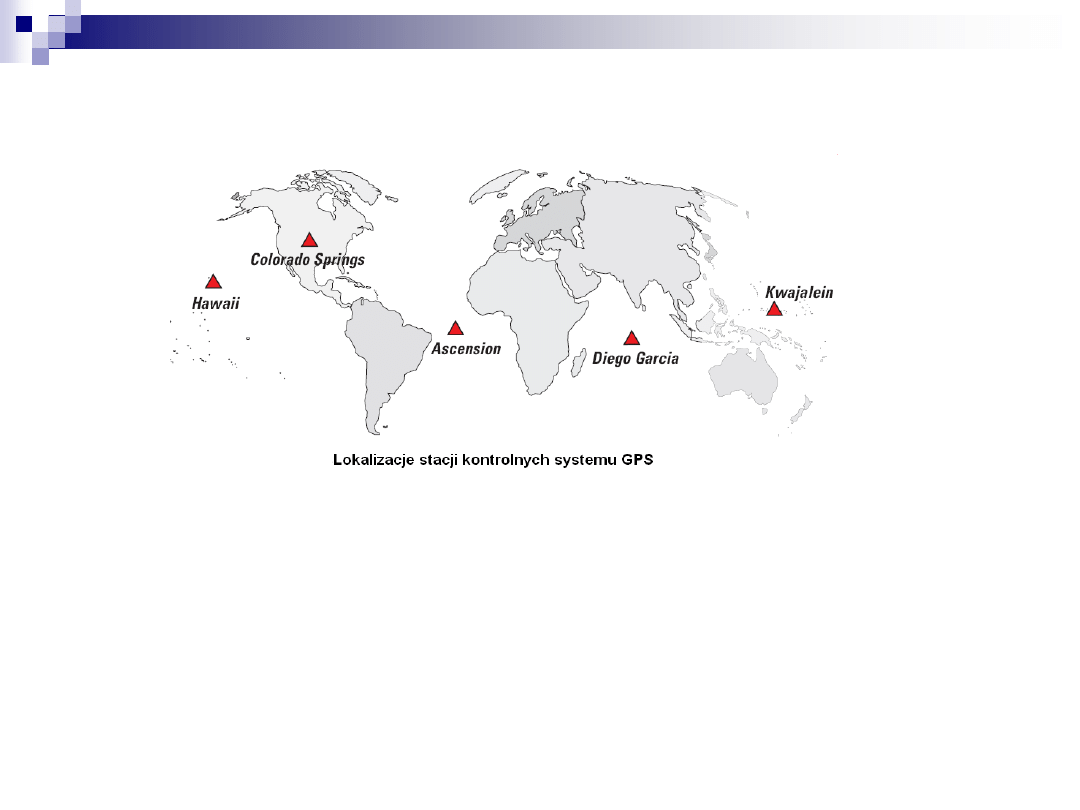
Segment kontroli
stacje śledzące: w
Colorado Springs (USA)
oraz na wyspach:
Wniebowstąpienia (Ascension)
na południowym Atlantyku, na
Hawajach
,
Diego Garcia
na Oceanie Indyjskim oraz na
atolu Kwajalein
wchodzącym w skład Wysp Marshala na zachodnim Pacyfiku
śledzenie satelitów, prowadzenie kontroli czasu, obliczanie efemeryd i
poprawek oraz przekazywanie wyników do pamięci satelitów
przekazywanie aktualnych informacji przez stację centralną 2-3 razy
na dobę

Segment użytkowników
nawigacja lądowa, lotnicza i morska
geodezja
Sygnały docierające z satelitów
systemu GPS
specjalny kod i stabilna częstotliwość 10.23 MHz (częstotliwość
podstawowa)
pierwsza częstotliwość nośna L1 (1575.42 MHz, 19.05 cm)
druga częstotliwość nośna L2 (1227.60 MHz, 24.45 cm)
kod C/A (powszechnie dostępny) o częstotliwości 1023 MHz, dł. fali
293.1 m, okres 1 ms
kod P (chroniony) o częstotliwości 10.23 MHz, okres 267 dni,
długość fali 29.31 m.
kod militarny Y
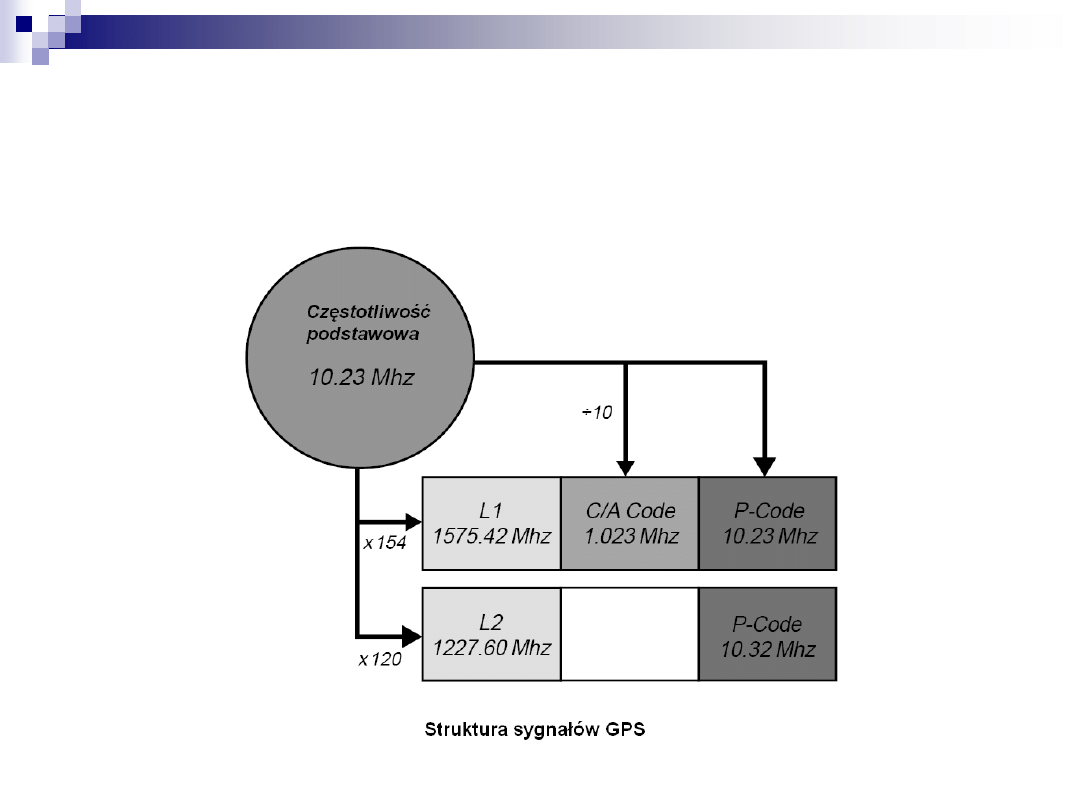
Struktura sygnałów GPS
Geodezyjne odbiorniki satelitarne
odbiór i gromadzenie wszystkich informacji przekazywanych przez
satelity systemu GPS
rodzaje odbiorników
jednoczęstotliwościowe jednokodowe (L1, C/A)
dwuczęstotliwościowe z kodem P (L1, L2, C/A, P) z możliwością
specjalnej obróbki sygnału
najbardziej rozpowszechnione: Trimble, Wild-Leica, Ashtech
kanał odbiorczy - niezależny kompleks hardware-software do
odbioru i przetwarzania sygnału jednego satelity
moduł identyfikacji i wstępnej obróbki
mikroprocesor -
moduł do wyznaczania pozycji anteny na podstawie
depeszy satelitarnej i pomiarów, sterowanie pracą odbiornika,
prowadzenie ciągłego wyznaczania pozycji
Pomiar odległości satelity od anteny
odbiornika
metoda kodowa
(wyznaczanie pseudoodległości)
przesunięcie obu kodów względem siebie aż do uzyskania tzw.
korelacji
satelity wyposażone w zegary atomowe, odbiorniki GPS - w
mniej precyzyjne zegary kwarcowe
błąd zegarowy wspólny dla wszystkich odległości mierzone, a
więc możliwy do wyznaczenia
metoda fazowa
(pomiar fazy sygnału dochodzącego)
odległość wyrażana poprzez N pełnych, znanych długości fali:
odbiornik GPS mierzy fazę
j
główną trudnością jest wyznaczenie liczby N (nieoznaczoność
pełnych cykli długości fal), niezbędna tzw. inicjalizacja pomiaru.
j
N
d
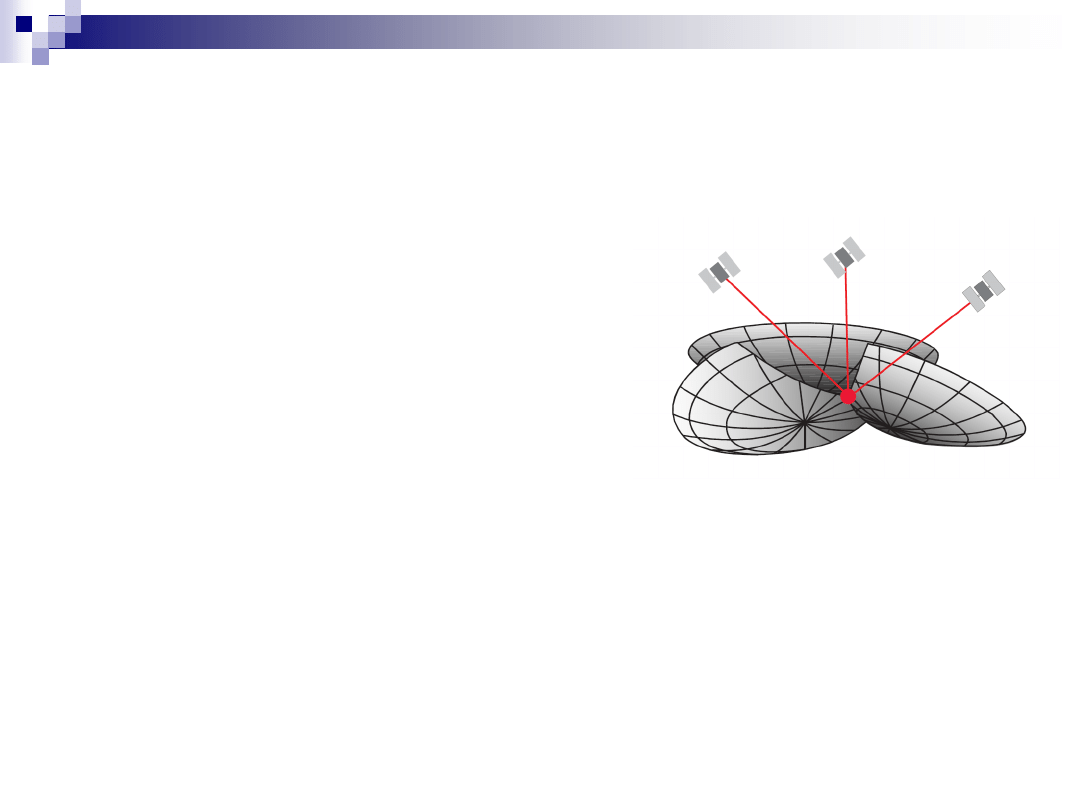
Zasada wyznaczania położenia
punktów
przestrzenne liniowe wcięcie wstecz
(metody bezwzględne i względne)
błędy szczątkowe refrakcji jonosferycznej
i troposferycznej, błędy orbit satelitarnych,
szczątkowe błędy niesynchroniczności
zegarów, itp.
dokładność metod względnych jest
znacznie wyższa, bo w wyznaczaniu
różnic eliminują się
doświadczenia wykazują, że standardowa
dokładność pomiarów geodezyjnych
wynosi 10
-6
D (1 mm na 1 km)
osiągnięcie wynoszącej 10
-7
, a nawet 10
-8
wymaga permanentnych obserwacji
satelitarnych i specjalnych
zaawansowanych procedur opracowania
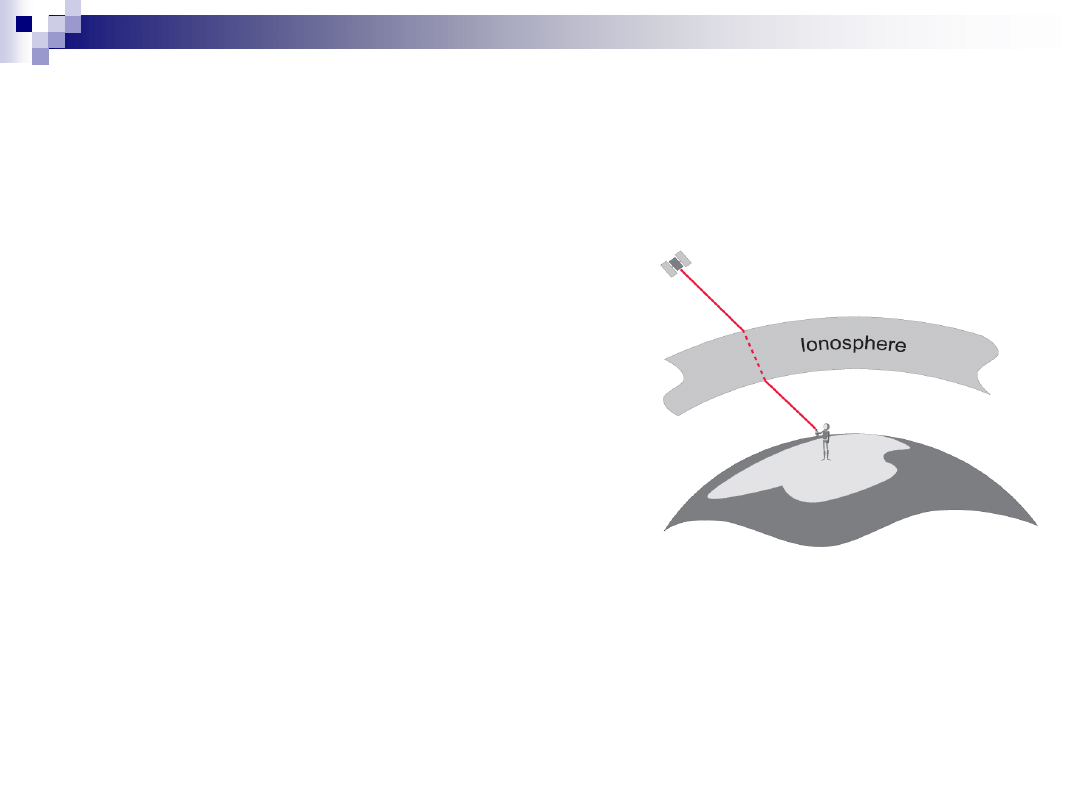
Refrakcja troposferyczna i
jonosferyczna
zmiany prędkości fali
elektromagnetycznej
troposfera do wysokości około 7-18
km
jonosfera - od ok.80 km do 600, a
nawet 1000 km
refrakcja w troposferze prawie nie
zależy od częstotliwości
najgroźniejsze zakłócenia
jonosferyczne, zależne od gęstości
elektronów
zakłócanie modulacji częstotliwości i
fazy fali nośnej w inny sposób
Refrakcja troposferyczna
opóźnienie sygnału satelitów (całkowite opóźnienia troposferyczne
przeliczone na błędy pseudoodległości: około 2 m, gdy satelita
znajduje się w zenicie, aż 20-25 m dla satelitów znajdujących się na
wysokości horyzontalnej h=5
o
)
główny czynnik ograniczający dokładność wyznaczania wysokości
geometrycznych
zapobieganie:
pomiar parametrów atmosferycznych - zmniejszenie błędu do ok.2-5 cm
pomiar zawartości pary wodnej za pomocą radiometru (do wysokości
ok.12 km); zmniejszenie błędu do ok.1-2 cm
modelowanie refrakcji troposferycznej redukcja błędu do 1-5 cm, a
przy odpowiednio rozmieszczonych satelitach (>4, różne wysokości)
nawet do kilku milimetrów
Refrakcja jonosferyczna
spowolnienie modulacji fali nośnej wysyłanej przez satelity GPS
(tzw. opóźnienie jonosferyczne - pozorne wydłużenie drogi
przebiegu sygnałów)
przyśpieszenie fazy tej fali (prędkość fazowa może być większa od
prędkości światła w próżni - pozorne skrócenie drogi
pomiar prowadzony na dwóch częstotliwościach jest praktycznie
wolny od wpływu refrakcji jonosferycznej (jonosfera opóźnia
znacznie bardziej sygnał L2 niż L1, różnica opóźnień sygnałów daje
się przeliczyć na opóźnienie wywołane jonosferą)
Technologie pomiarów GPS
Procedury pomiarowe GPS dzieli się na takie, których celem jest
wyznaczenie
w układzie, w którym podawane są orbity satelitów GPS, tj. układzie
WGS-84:
pozycji bezwzględnej, tzn. współrzędnych x, y, z
lub
pozycji względnej, tj. różnic współrzędnych
D
x,
D
y,
D
z (wektora
łączącego dwa punkty)
pomiary bezwzględne
mało dokładne (dokładność wyznaczenia współrzędnych co
najwyżej kilka metrów
Należy przy tym pamiętać, że metodami geodezji klasycznej
wyznaczenie współrzędnych odniesionych do środka ciężkości
Ziemi było możliwe z dokładnością co najwyżej kilkuset m).
Technologie pomiarów GPS (c.d.)
pomiary względne
synchroniczne obserwacje grupy satelitów GPS przez co najmniej
2 odbiorniki GPS
Podczas pomiarów względnych pewne błędy obserwacyjne, błędy
instrumentalne oraz wpływy środowiska pomiarowego obciążają
wszystkie pomiary w taki sam lub zbliżony sposób.
Pozycja względna (różnica pozycji absolutnych) może być więc
wolna od pewnych błędów (podobnie jak w naziemnych
procedurach pomiarów różnicowych).
Dotychczasowe doświadczenia wykazują, że z reguły
standardowa dokładność pomiarów geodezyjnych wynosi 10
-6
D (1
mm na 1 km).
Jest możliwe osiągnięcie jeszcze wyższej dokładności,
wynoszącej 10
-7
, a nawet 10
-8
, lecz wymaga to wykonywania
permanentnych obserwacji satelitarnych i specjalnych procedur
opracowania
.
Dokładność wyznaczania
położenia punktów
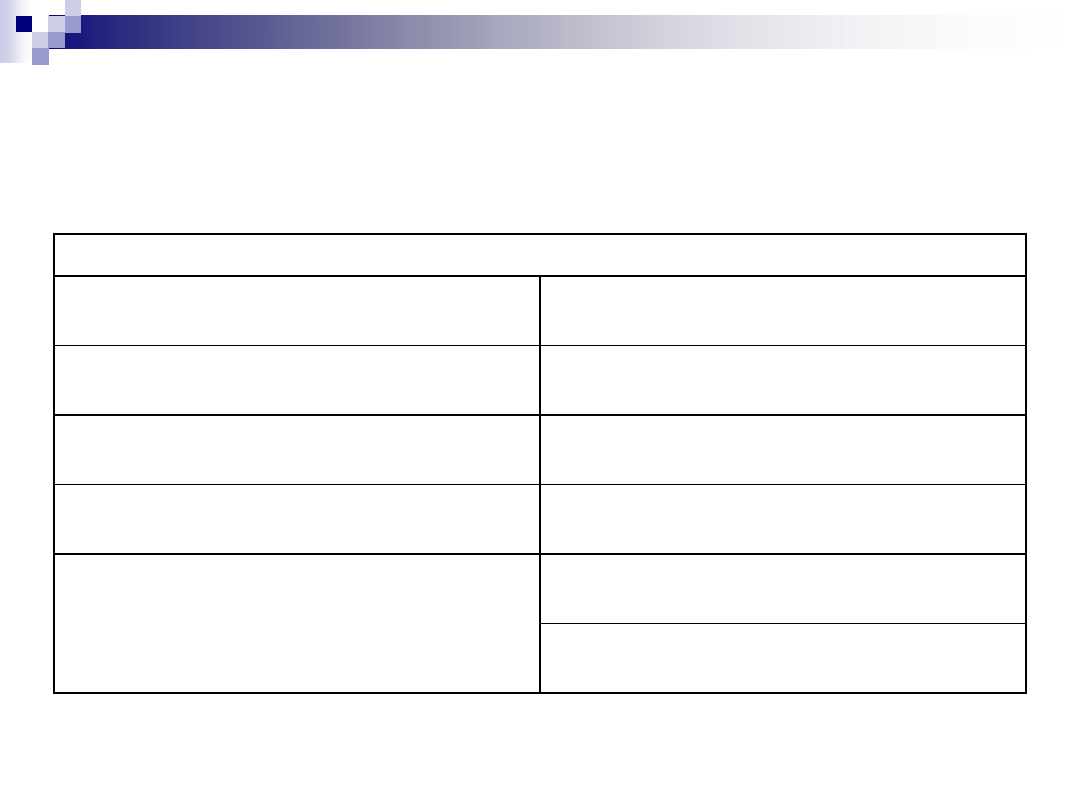
Wyznaczanie położenia punktów
Pojedyncze punkty
(single point positioning)
Względne położenie punktów
(relative positioning)
wyznaczanie współrzędnych X, Y, Z
wyznaczanie różnic współrzędnych dX, dY, dZ
niezbędny jeden odbiornik GPS
niezbędne przynajmniej dwa odbiorniki GPS
niska dokładność
możliwa najwyższa dokładność ("centymetrowa" i
"milimetrowa")
sposób używany zazwyczaj w technologiach
kinematycznych (nawigacji) najczęściej przy
wykorzystaniu obserwacji kodowych
stosowane są metody obserwacji kodowych i
fazowych
sposób najczęściej używany we wszystkich
pracach geodezyjnych
Kategorie procedur obserwacyjnych
techniką GPS
pomiary statyczne
Podczas wykonywania obserwacji odbiorniki przez cały czas nie
zmieniają względem siebie położenia.
pomiary kinematyczne
W czasie pomiarów jeden lub więcej odbiorników zmienia swoje
położenie, podczas gdy przynajmniej jeden odbiornik prowadzi
pomiar stacjonarny.
Procedury geodezyjnych pomiarów względnych GPS:
pomiary statyczne
pomiar szybki statyczny
pomiar kinematyczny
pomiar częściowo kinematyczny (z odmianą stop & go)
pomiar pseudostatyczny, zwany też pseduokinematycznym
pomiary różnicowe (DGPS)
Geodezyjne procedury pomiarowe
techniką GPS
pomiary statyczne GPS
procedura o najwyższej dokładności
oba odbiorniki uczestniczące w pomiarze pozostają stacjonarne
w ciągu całej sesji obserwacyjnej
długość sesji zależy głównie od żądanej dokładności i od
odległości między punktami
Z wieloletnich doświadczeń wynika, że dla sieci lokalnych o
bokach do 15-
20 km długość sesji wynosi 30-90 minut.
Procedury pomiarowe techniką GPS
(c.d.)
pomiar szybki statyczny
jeden z odbiorników stoi na punkcie odniesienia, drugi
przemieszcza się z punktu na punkt
Wymagany jest jednokrotny pomiar na każdym wyznaczanym
punkcie, nie potrzeba ciągłości śledzenia satelitów przy
transporcie odbiornika z punktu na punkt, jednak do pomiaru są
potrzebne odbiorniki 2-
częstotliwościowe ze specjalnym
oprogramowaniem.
czas obserwacji na stanowisku zależny od liczby
obserwowanych satelitów (10-20 minut przy 6-4 satelitach)
Procedury pomiarowe techniką GPS (c.d.)
pomiary kinematyczne GPS (typowo nawigacyjne)
w pomiarze bierze udział 1 odbiornik stacjonarny, względem
którego wyznaczana jest pozycja 2-go ruchomego odbiornika
pozycję obiektu ruchomego można uzyskać w czasie
rzeczywistym (np. co 1 sekundę lub co 5 sekund)
albo cały
materiał obserwacyjny można opracować po zakończeniu
pomiarów
niezbędna jest ciągła łączność z obserwowanymi satelitami
Procedury pomiarowe techniką GPS (c.d.)
pomiar częściowo kinematyczny (z odmianą stop & go)
nie wymaga długich pomiarów statycznych i pozwala skrócić czas
pomiaru
kombinacja pomiarów statycznych i kinematycznych (bo 2
odbiorniki)
jeden umieszczony na punkcie odniesienia,
drugi przemieszczających się z punktu na punkt
odbiornik ruchomy wykonuje pomiar na punktach tylko przez 1-2
minuty
Wada
– niezbędna ciągła łączność z przynajmniej 4 satelitami
podczas całej sesji i transportu instrumentu z punktu na punkt
(trudne w terenie o wysokiej zabudowie, w lesie, itp.)
niezbędna inicjalizacja statyczna na początku pomiaru (przy
pomiarze metodą fazową) dla wyznaczenia nieoznaczoności fazy
inicjalizacja statyczna:
około 25-minutowy pomiar statyczny dowolnej bazy, pomiar
znanego wektora lub pomiar statyczny z zamianą anten
Procedury pomiarowe techniką GPS (c.d.)
technologie pseudostatyczne
dwukrotny pomiar GPS na każdym wyznaczanym punkcie
podwójny pomiar zastępuje proces inicjalizacji.
pomiar na każdym punkcie ok.10-15 minut
na ostatnim wyznaczanym punkcie 1-2 godzinne oczekiwanie na
zmianę konfiguracji satelitów i ponowny pomiar GPS
nie wymaga ciągłej nieprzerwanej łączności z satelitami podczas
transportu odbiornika z punktu na punkt
wada to konieczność dwukrotnego stawania na tym samym punkcie
wyznaczanym
Procedury pomiarowe techniką GPS (c.d.)
pomiary różnicowe GPS (DGPS) (szczególny przypadek pomiarów
względnych)
szczególny przypadek pomiarów względnych
W czasie rzeczywistym wyznacza się w nich pozycję względną
ruchomego odbiornika GPS względem innego, nieruchomego
odbiornika umieszczonego na punkcie o znanej pozycji.
Istotą pomiaru jest to, że stacja bazowa wykonuje ciągłe
obserwacje kodowe i drogą radiową (dzięki połączeniu z
modemem i przekaźnikiem radiowym) transmituje do
odbiornika ruchomego poprawki, które są przez niego na
bieżąco wykorzystywane do obliczania poprawionej pozycji
anteny.
metoda używana m.in. w morskich i lotniczych systemach
nawigacyjnych
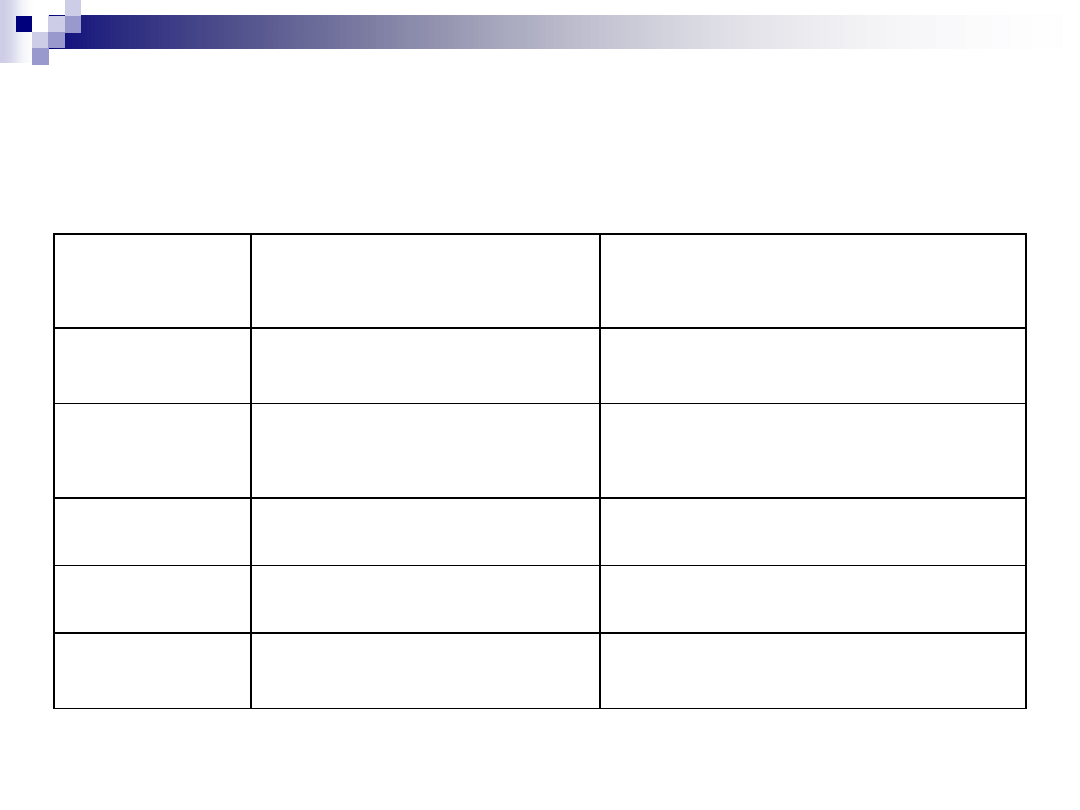
Dokładność poszczególnych metod
pomiaru GPS
Metoda
Odległości punktów
Dokładność wyznaczenia
położenia
statyczna
do 20 km
do 50 km
+- 5 mm + 1 ppm
+- 5 mm + 1 ppm
szybka
statyczna
do 10 km
+- 5-20 mm + 1 ppm
kinematyczna
do 10 km
+- 10-20 mm +1-2 ppm
stop & go
do 10 km
+- 10-20 mm+1-2 ppm
DGPS
do 10 km
do 500 km
+- 0.3-3.0 m
+- 1.0-5.0 m
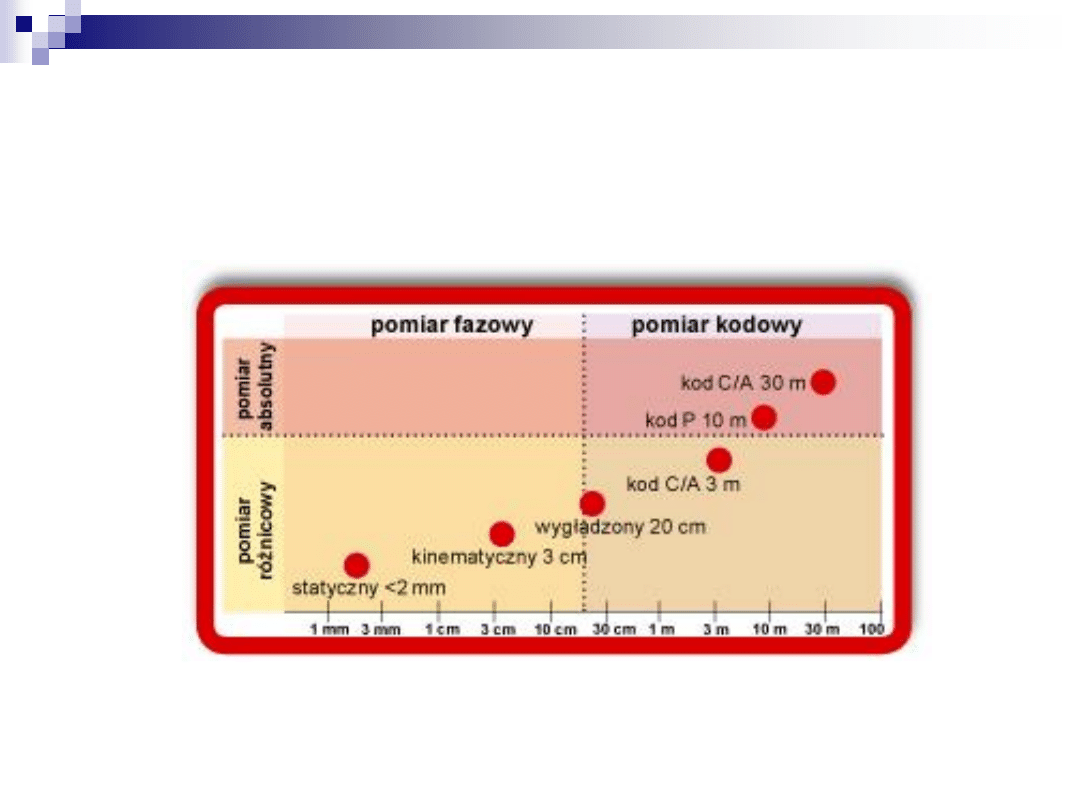
Dokładność pomiarów GPS
Geodezyjne odbiorniki GPS
zasadnicza cecha to zdolność do odbioru i gromadzenia wszystkich
informacji, jakie są przekazywane przez satelity systemu GPS
podstawowa cecha odbiornika GPS to kanał odbiorczy
Jest to niezależny kompleks do odbioru i przetwarzania sygnału jednego
satelity emitującego jedną lub dwie częstotliwości.
odbiorniki geodezyjne to wyłącznie odbiorniki wielokanałowe
Posiadają one od kilku do kilkunastu kanałów.
Procesy odbioru i przetwarzania sygnałów z wielu satelitów są prowadzone
jednocześnie.
W przeciwieństwie do tego, w innym typie odbiornika (multipleksyjnym)
sygnały poszczególnych satelitów GPS odbierane są kolejno najczęściej
przez jeden kanał.
najprostsze i najtańsze odbiorniki geodezyjne to odbiorniki
jednoczęstotliwościowe jednokodowe (L1, C/A).
najbardziej zaawansowane odbiorniki to
odbiorniki dwuczęstotliwościowe z
kodem P (L1, L
2, C/A, P), z możliwością specjalnej obróbki odbieranego
sygnału satelitarnego
Odbiorniki geodezyjne
Odbiorniki geodezyjne (c.d.)
Degradacje sygnału satelitów
wprowadzone celowo z chwilą wprowadzenia pełnej
operatywności systemu GPS (1.stycznia 1995)
powodują zmniejszenie dokładności wyników wyznaczeń
pozycji bezwzględnej
dwa rodzaje degradacji
pierwszy (SA) polega na zniekształceniu poprawki zegarów
satelitów i ograniczeniu dokładności elementów orbit zawartych
w sygnale satelitarnym
drugi polega na zaprzestaniu emisji kodu precyzyjnego i
zastąpienie go kodem tajnym Y
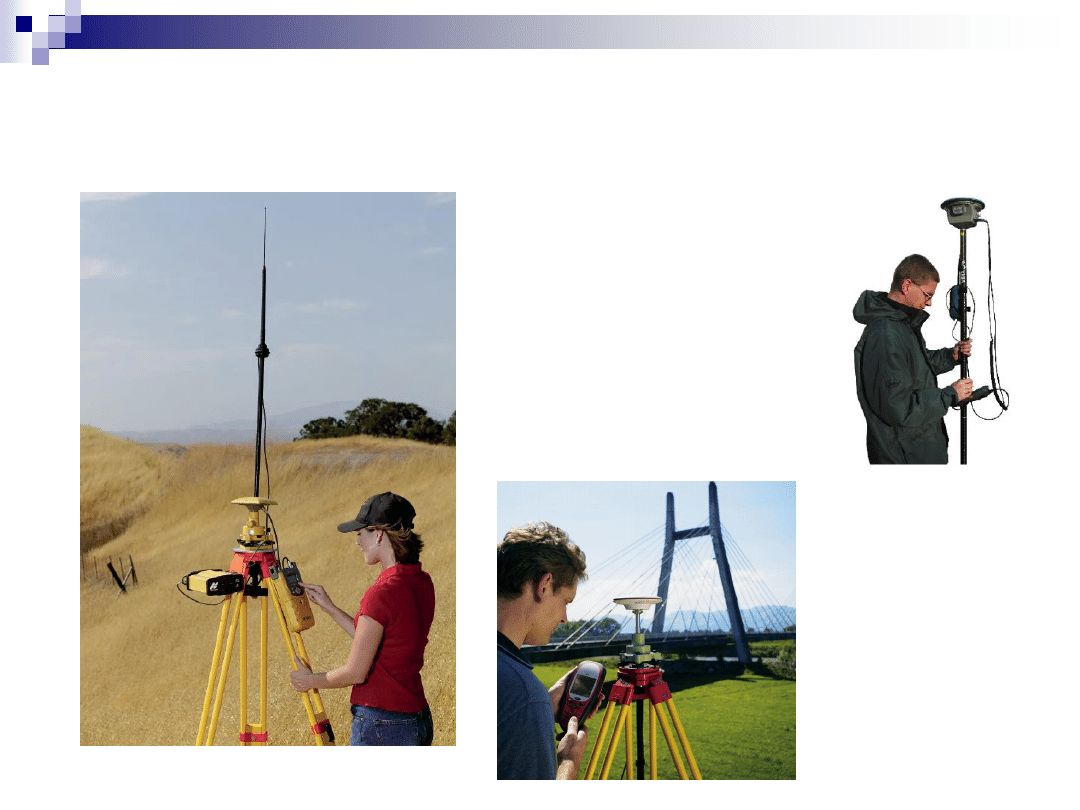
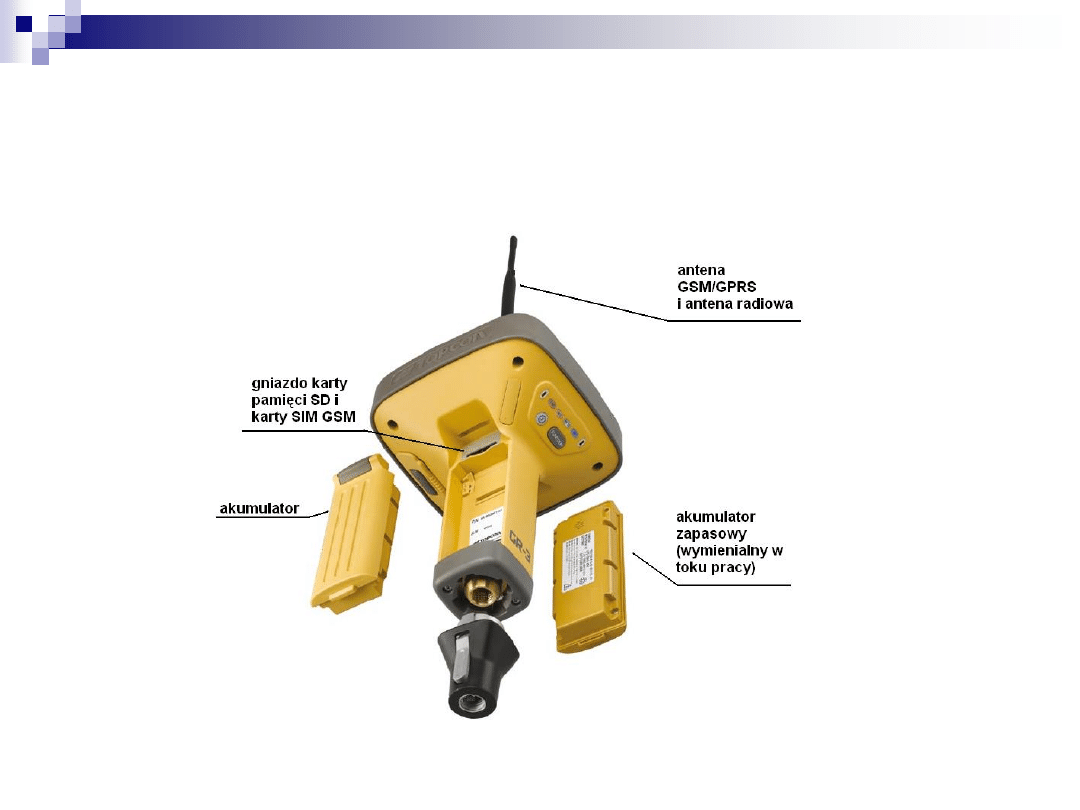
Charakterystyka geodezyjnych
odbiorników GPS
szczytowy twór współczesnej technologii z zakresu elektroniki i
telekomunikacji
pomiar w pełni automatyczny
Jedyną czynnością pomiarową jest pomierzenie elementów
mimośrodowego posadowienia odbiornika lub anteny względem znaku
pomiarowego.
Jeśli odbiornik lub tylko antena są scentrowane nad znakiem, pozostaje
tylko pomierzyć tradycyjną metodą wysokość anteny względem znaku
pomiarowego.
anteny odbiorników GPS najczęściej konstruowane jako oddzielne
części odbiornika, umieszczane na statywie pomiarowym bądź na
spodarce
pozostałe zespoły odbiornika zamknięte w oddzielnej obudowie
Charakterystyka geodezyjnych
odbiorników GPS (c.d.)
moduł identyfikacji i wstępnej obróbki sygnału
odbiór sygnałów z modułu anteny
ich identyfikacja
rozkład na elementy
porównywanie odbieranych częstotliwości z częstotliwościami
uzyskiwanymi na podstawie oscylatora kwarcowego odbiornika
dekodowanie depeszy satelitarnej
mikroprocesor (oddzielny moduł odbiornika)
wyznaczanie pozycji anteny na podstawie depeszy satelitarnej i
pomiarów
Inne uniwersalne systemy
nawigacyjne
System Galileo to europejska, cywilna wersja amerykańskiego GPS.
W budżecie UE na lata 2007-13 zarezerwowano 1,2 mld euro
dotacji na tworzenie gwiezdnej nawigacji.
Resztę - za udziały w zyskach z eksploatacji systemu - mają
wyłożyć firmy z Francji, Włoch, Niemiec, Hiszpanii i Wlk. Brytanii
wybrane do tworzenia Galileo.
Całość szacuje się ostrożnie na 10 mld euro.
Do tej pory na orbicie umieszczono dwa satelity systemu, który w
sumie ma obejmować 30 satelitów.
BEIDOU Chiński system nawigacji satelitarnej, który w chwili
uruchomienia będzie obejmował swym zasięgiem tylko region Chin.
DORIS (Doppler Orbitography and Radio-positioning Integrated by
Satellite), to system nawigacyjny stworzony przez Francję.
GNSS (Global Navigation Satellite System) w fazie projektów i
wstępnych realizacji jest stworzenie ogólnoświatowego cywilnego
systemu nawigacji.
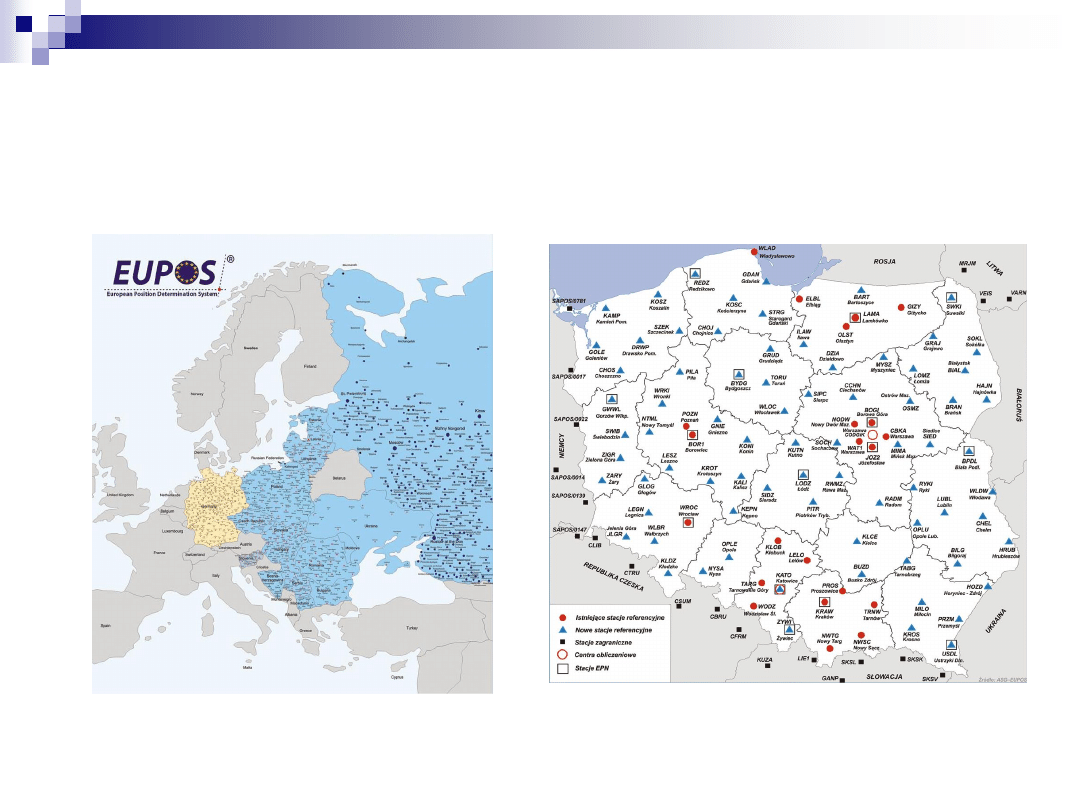
ASG-EUPOS
Wyszukiwarka
Podobne podstrony:
14 Stosowanie technologii GPS w pomiarach geodezyjnych
Ćw 11 12 13 technologia mięsna + książka
Wprowadzenie do technologii GPS
13 TECHNOLOGIA Ethernet
Technologia GPS
Ćw 11 12 13 technologia mięsna + książka
13 Organizowanie procesów technologicznych
Str.13 - Operacja 80, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, te
technologia gastronomiczna, W7 Gastronomiczna - warzywa i owoce, 13
13. Miareczkowanie amperometryczne, Technologia Chemiczna, Rok III, Semestr II, Instrumentalne metod
ch fizyczna 13, POLITECHNIKA ŁÓDZKA, Technologia Żywności i Żywienia Człowieka, semestr 4, Chemia fi
fiz 13, SGGW - Technologia żywnosci, II semestr, SEMESTR 2, fizyka, sprawozdania, Sprawozdania
TPL WYK 13 01 07 Jednostkowe procesy technologiczne
13, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, technologia maszyn,
2 11 Nowe technologie i cyfryzacja 15 05 13
13-fluorowceTECH, Technologia chemiczna PG, Chemia, I ROK, WYKŁADY, WYKŁADY
O technologii pomiarow GPS RTK Nieznany
wd 1-12 13 14, Semestr V, Projektowanie technologiczne
więcej podobnych podstron