
Algorytmy przeszukiwania grafów i drzew
dla gier i łamigłówek
Przemysław Kl ˛esk
pklesk@wi.zut.edu.pl
Katedra Metod Sztucznej Inteligencji i Matematyki Stosowanej
Zagadnienia i algorytmy
1
2
3
4
5
Przemysław Kl ˛esk (KMSIiMS, ZUT)
2 / 48
Algorytm Breadth-First-Search
Czy istnieje ´scie ˙zka do celu?
v
1
v
2
v
3
v
4
v
5
v
6
v
7
v
8
Przemysław Kl ˛esk (KMSIiMS, ZUT)
3 / 48
Algorytm Breadth-First-Search
Własno´sci algorytmu
Breadth First Search
Wykonuje zachłanne (w skrajnym przypadku wyczerpuj ˛ace)
przeszukiwanie całego grafu
wszerz
, a ˙z do natrafienia na w ˛ezeł
docelowy.
Algorytm ten mo ˙zna traktowa´c, jako ogólny schemat, którego
szczególne (usprawnione) przypadki to algorytmy: Best First
Search, A
∗
, algorytm Dijkstry, i inne.
Breadth First Search operuje na dwóch zbiorach:
Open
(zawiera
w ˛ezły, które maj ˛a by´c jeszcze rozpatrzone) i
Closed
(zawiera
w ˛ezły, które ju ˙z rozpatrzono).
Ka ˙zdy z w ˛ezłów ma mo ˙zliwo´s´c zapami ˛etania jednego swojego
poprzednika, tak aby po znalezieniu rozwi ˛azania mo ˙zna było
prze´sledzi´c ´scie ˙zk ˛e
.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
4 / 48
Algorytm Breadth-First-Search
Breadth First Search
Algorytm
1
Ustaw w w ˛e´zle pocz ˛atkowym pustego poprzednika i dodaj ten
w ˛ezeł do zbioru Open.
2
Dopóki zbiór Open pozostaje niepusty powtarzaj:
1
Pobierz (i usu ´n) jeden w ˛ezeł ze zbioru Open. Nazwijmy ten
w ˛ezeł v.
2
Je ˙zeli v jest w ˛ezłem docelowym (spełnia warunek stopu), to
przerwij cały algorytm i zwró´c v jako wynik.
3
Włó ˙z do zbioru Open tych wszystkich potomków w ˛ezła v,
którzy nie wyst ˛epuj ˛a w zbiorze Closed. Zapami ˛etaj w nich v
jako ich poprzednika.
4
Włó ˙z v do zbioru Closed.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
5 / 48
Algorytm Breadth-First-Search
Breadth First Search
´Sledzenie ´scie ˙zki
1
Przypisz do roboczego w ˛ezła o nazwie v, w ˛ezeł b ˛ed ˛acy
rozwi ˛azaniem.
2
Zainicjalizuj ci ˛ag reprezentuj ˛acy ´scie ˙zk ˛e zawarto´sci ˛a v:
Path = (v).
3
Dopóki v ma niepustego poprzednika, powtarzaj:
1
Przypisz w miejsce v jego poprzednika (v ← v.parent).
2
Dopisz z przodu ´scie ˙zki Path zawarto´s´c v.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
6 / 48
Algorytm Breadth-First-Search
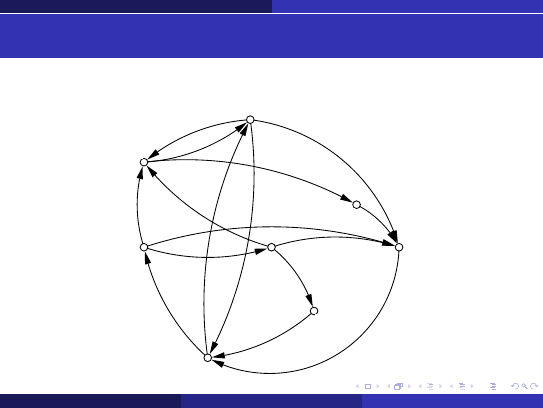
Przykładowe działanie
(dla grafu ze str. 3)
1
Open = {v
1
}, Closed = {}.
2
Open = {v
1
} , ∅ wi ˛ec wykonujemy ciało p ˛etli:
2.1
v = v
1
, Open = {}.
2.2
v = v
1
,
v
8
(warunek stopu niespełniony).
2.3
Open = {v
2
, v
3
, v
6
}.
2.4
Closed = {v
1
}.
2
Open = {v
2
, v
3
, v
6
} , ∅ wi ˛ec wykonujemy ciało p ˛etli:
2.1
v = v
2
, Open = {v
3
, v
6
}.
2.2
v = v
2
,
v
8
(warunek stopu niespełniony).
2.3
Open = {v
3
, v
6
} (uwaga: v
3
jako potomek v
2
nie jest po raz drugi dodawany do
Open).
2.4
Closed = {v
1
, v
2
}.
2
Open = {v
3
, v
6
} , ∅ wi ˛ec wykonujemy ciało p ˛etli:
2.1
v = v
3
, Open = {v
6
}.
2.2
v = v
3
,
v
8
(warunek stopu niespełniony).
2.3
Open = {v
6
, v
4
} (uwaga: v
1
jako potomek v
3
nie jest dodawany do Open, bo jest ju ˙z
w Closed.)
2.4
Closed = {v
1
, v
2
, v
3
}.
2
. . .
Przemysław Kl ˛esk (KMSIiMS, ZUT)
7 / 48
Algorytm Breadth-First-Search
Uwagi o Breadth First Search
Zbiory Open i Closed w przypadku Breadth First Search
zazwyczaj implementuje si ˛e jako zwykłe kolejki FIFO. Dopiero w
specjalizowanych wersjach algorytmu tj. w algorytmach
BestFirstSearch i A
∗
, zbiory te implementuje si ˛e odpowiednio jako:
kolejk ˛e priorytetow ˛a
i
hashmap ˛e
.
Je ˙zeli przeszukiwanie dotyczy drzewa (grafu bez cykli), to zbiór
Closed mo ˙zna pomin ˛a´c.
Breadth First Search nie jest w ˙zaden sposób ukierunkowany na
szybsze dotarcie do rozwi ˛azania (przeszukuje wszerz): nie
minimalizuje długo´sci ´scie ˙zki, nie wykorzystuje ˙zadnej
heurystyki.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
8 / 48
Algorytm Best-First-Search
Własno´sci algorytmu
Best First Search
(Judea Pearl)
Ka ˙zdemu przeszukiwanemu stanowi (w ˛ezłowi) v nadawana jest
heurystyczna ocena liczbowa
f (v) , szacuj ˛aca, na ile daleko dany stan
jest od docelowego.
Algorytm przeszukuje w pierwszej kolejno´sci stany o najni ˙zszej
warto´sci funkcji heurystycznej.
Zbiór Open implementowany jest przez
kolejk ˛e priorytetow ˛a
(ang. PriorityQueue)
porz ˛adkuj ˛ac ˛a stany wg heurystyki. Wstawienie
nowego elementu do kolejki z zachowaniem porz ˛adku ma zło ˙zono´s´c
O(log n)
. Wyci ˛agni ˛ecie elementu z kolejki ma zło ˙zono´s´c
O(1)
.
Zbiór Closed implementowany jest przez
hashmap ˛e
. Sprawdzenie, czy
pewien stan ju ˙z był rozpatrzony i jest w zbiorze Closed, ma zło ˙zono´s´c
O(1)
.
Ka ˙zdy stan przechowuje dotychczas najkorzystniejszego dla niego
poprzednika.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
9 / 48
Algorytm Best-First-Search
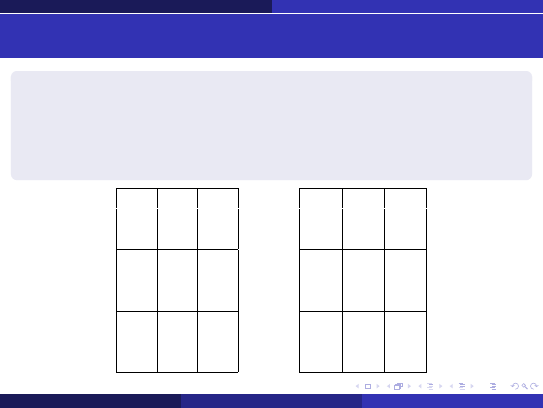
Sudoku
Maj ˛ac dany pewien stan pocz ˛atkowy planszy 9 × 9, podzielonej
dodatkowo na 9 podkwadratów o wymiarach 3 × 3 ka ˙zdy, nale ˙zy
napełni´c plansz ˛e tak, aby w ka ˙zdym wierszu, w ka ˙zdej kolumnie i w
ka ˙zdym podkwadracie były wykorzystane wszystkie liczby ze zbioru
{1, 2, . . . , 9}.
1*5
*37
**8
*7*
***
***
**8
1**
***
**3
*7*
**1
74*
*1*
*63
2**
*4*
9**
***
**5
1**
***
***
*8*
4**
62*
5*7
−→
195
237
648
674
859
312
328
164
759
853
976
421
749
512
863
216
348
975
962
785
134
537
491
286
481
623
597
(Best First Search w Javie: czas = 1607 ms (procesor 2 GHz), odwiedzonych stanów = 3168.)
Przemysław Kl ˛esk (KMSIiMS, ZUT)
10 / 48
Algorytm Best-First-Search
Sudoku
Ogólne sudoku n
2
Maj ˛ac dany pewien stan pocz ˛atkowy planszy n
2
× n
2
, podzielonej
dodatkowo na n
2
podkwadratów o wymiarach n × n ka ˙zdy, nale ˙zy
napełni´c plansz ˛e tak, aby w ka ˙zdym wierszu, w ka ˙zdej kolumnie i w
ka ˙zdym podkwadracie były wykorzystane wszystkie liczby ze zbioru
{1, 2, . . . , n
2
}.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
11 / 48
Algorytm Best-First-Search
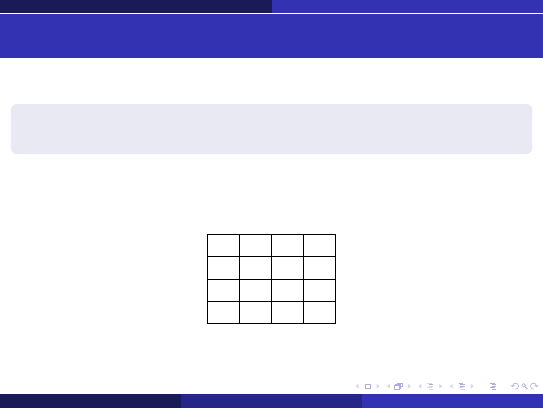
Problem n-hetmanów
Na szachownicy n × n nale ˙zy ustawi´c n hetmanów, w taki sposób, aby
˙zaden przez ˙zadnego „nie był szachowany”.
Dla n = 2, 3 rozwi ˛azanie nie istnieje. Przykład rozwi ˛azania dla n = 4:
Q
Q
Q
Q
Przemysław Kl ˛esk (KMSIiMS, ZUT)
12 / 48
Algorytm Best-First-Search
Best First Search
Algorytm
1
Ustaw w stanie pocz ˛atkowym pustego poprzednika i dodaj ten stan do
zbioru Open.
2
Dopóki zbiór Open pozostaje niepusty powtarzaj:
1
Pobierz (i usu ´n) jeden stan v ze zbioru Open (jest to stan najlepszy w sensie zadanej
heurystyki).
2
Je ˙zeli v jest stanem docelowym (spełnia warunek stopu), to przerwij cały algorytm
i zwró´c v jako wynik.
3
Wygeneruj wszystkie stany potomne dla v i dla ka ˙zdego z nich wykonaj:
1
Je ˙zeli stan wyst ˛epuje w Closed, to nie badaj go dalej.
2
Policz warto´s´c heurystyki dla tego stanu.
3
Je ˙zeli stan nie wyst ˛epuje w Open, to dodaj go ustawiaj ˛ac v jako jego
poprzednik.
4
Je ˙zeli stan wyst ˛epuje w Open, to podmie ´n w nim warto´s´c heurystyki i
poprzednika, o ile nowo obliczona warto´s´c jest korzystniejsza, i uaktualnij
jego pozycj ˛e w Open.
4
Włó ˙z v do zbioru Closed.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
13 / 48

Algorytm Best-First-Search
Przykładowe heurystyki
Sudoku (heurystyka naiwna)
Rozpoczynamy od zadanej planszy (stan pocz ˛atkowy) i dostawiamy
w puste pola (dowolne) dopuszczalne liczby (maks. 9 potomków na
ka ˙zdym poziomie drzewa). Mówimy, ˙ze stan jest tym bli ˙zszy
rozwi ˛azaniu, im mniej ma pustych pól.
f (v) =
∞,
je ˙zeli stan jest niepoprawny
;
liczba pustych pól w v.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
14 / 48
Algorytm Best-First-Search
Przykładowe proste heurystyki
Sudoku (heurystyka wg minimum pozostałych mo ˙zliwo´sci)
Uto ˙zsamijmy v z tablic ˛a sudoku. Niech R
v
(i, j) oznacza pozostałe mo˙zliwo´sci
dla komórki (i, j) tablicy v — pozostałe poprzez wyeliminowanie liczb
obecnych w wierszu i, kolumnie j i podkwadracie, do którego nale ˙zy (i, j).
Mówimy, ˙ze stan jest tym bli ˙zszy rozwi ˛azaniu, im ma mniej pozostałych
mo ˙zliwo´sci dla pewnej komórki. Dzieci podpinamy w tej wła´snie komórce.
f (v) = min
i,j
#R
v
(i, j).
Przemysław Kl ˛esk (KMSIiMS, ZUT)
15 / 48
Algorytm Best-First-Search
Przykładowe proste heurystyki
Sudoku (heurystyka wg sumy pozostałych mo ˙zliwo´sci)
Mówimy, ˙ze stan jest tym bli ˙zszy rozwi ˛azaniu, im ma mniejsz ˛a sum ˛e
pozostałych mo ˙zliwo´sci wzi ˛et ˛a po wszystkich komórkach. Dzieci
podpinamy w komórce: arg min
i,j
#R
v
(i, j).
f (v) =
X
i,j
#R
v
(i, j).
Przemysław Kl ˛esk (KMSIiMS, ZUT)
16 / 48
Algorytm Best-First-Search
Przykładowe proste heurystyki
n-hetmanów (heurystyka naiwna)
Rozpoczynamy od pustej szachownicy i dostawiamy w kolejnych wierszach
hetmany.
Mówimy, ˙ze stan jest bli ˙zszy rozwi ˛azaniu im ma mniej pustych wierszy.
f (v) =
∞,
je ˙zeli hetmany szachuj ˛a si ˛e
;
liczba pustych wierszy w v.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
17 / 48
Algorytm Best-First-Search
Przykładowe proste heurystyki
n-hetmanów (heurystyka wg minimum pozostałych mo ˙zliwo´sci)
Niech R
v
oznacza liczb ˛e pozostałych nieszachowanych pól w v. Mówimy, ˙ze
stan jest bli ˙zszy rozwi ˛azaniu im ma mniej nieszachowanych pól.
f (v) =
∞,
je ˙zeli hetmany szachuj ˛a si ˛e
;
R
v
.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
18 / 48

Algorytm Best-First-Search
Minimalne sudoku
Problem (w ogólno´sci dla sudoku n
2
)
Znale´z´c wszystkie pocz ˛atkowe układy sudoku, dla których istnieje
dokładnie jedno rozwi ˛azanie i które maj ˛a minimaln ˛a liczb ˛e ustalonych pól w
stanie pocz ˛atkowym.
Dowód, ˙ze takie stany istniej ˛a
Poczynaj ˛ac od dowolnej rozwi ˛azanej planszy (całkowicie wypełnionej)
odbieramy kolejno po jednej liczbie i sprawdzamy, czy nadal mo ˙zna b ˛edzie
rozwi ˛aza´c sudoku jednoznacznie. Przerywamy, gdy b ˛edzie istniało wi ˛ecej
ni ˙z jedno rozwi ˛azanie. Zwa ˙zywszy na fakt, ˙ze całkowicie pusta plansza nie
jest jednoznacznie rozwi ˛azywalna, wida´c ˙ze takie post ˛epowanie b ˛edzie
miało punkt stopu przy pewnym cz ˛e´sciowym zapełnieniu planszy. ¥
Przemysław Kl ˛esk (KMSIiMS, ZUT)
19 / 48
Algorytm Best-First-Search
Poszukiwanie minimalnych sudoku
Zarys algorytmu zachłannego
Rozpoczynamy od pełnej (rozwi ˛azanej) planszy.
Potomkami danego stanu s ˛a stany powstałe przez odebranie jednej
liczby z rodzica. Zatem mo ˙zemy utworzy´c n
2
potomków — tyle, ile jest
pól.
Dla ka ˙zdego potomka sprawdzamy, wykonuj ˛ac algorytm Best First
Search dla zwykłego problemu sudoku, czy istniej ˛a co najmniej 2
rozwi ˛azania.
Je ˙zeli pewien stan ma jedno rozwi ˛azanie, a wszystkie jego potomki
maj ˛a wi ˛ecej ni ˙z jedno, to nale ˙zy go zapami ˛eta´c jako kandydata na
minimalne sudoku.
Algorytm musimy jednak wykona´c, a ˙z do przejrzenia pełnego grafu.
Nie mo ˙zna zatrzyma´c si ˛e na pierwszym rozwi ˛azaniu, jako ˙ze w innych
„rejonach” grafu, mog ˛a istnie´c rozwi ˛azania o mniejszej liczbie
elementów na planszy pocz ˛atkowej.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
20 / 48
Algorytm Best-First-Search
Poszukiwanie minimalnych sudoku
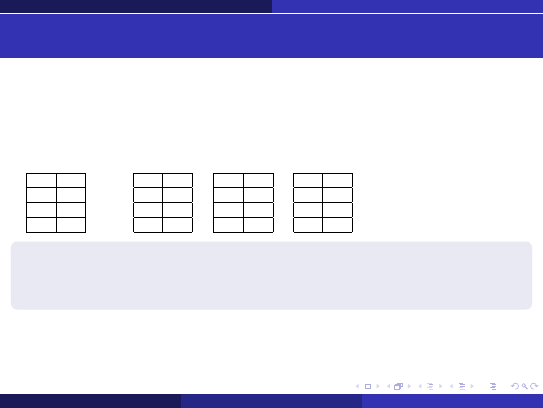
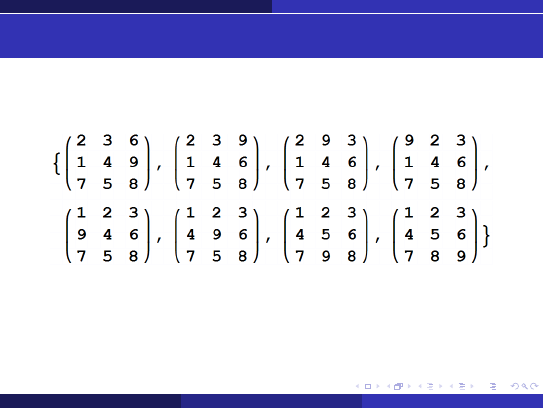
Dla n = 2 rozpoczynaj ˛ac od poni ˙zszej planszy znaleziono 128 minimalnych sudoku (maj ˛acych 4
pozycje ustalone).
12
34
34
12
23
41
41
23
→
∗∗
∗∗
∗∗
12
∗∗
∗∗
4∗
∗3
,
∗∗
∗∗
∗∗
12
∗∗
∗∗
41
∗∗
,
∗∗
∗∗
∗∗
12
∗∗
∗1
4∗
∗∗
,
. . .
Oczywi´scie, aby pozna´c prawdziw ˛a liczb ˛e wszystkich rozwi ˛aza ´n „bazowych” nale ˙załoby: (1)
uto ˙zsami´c wszystkie układy równowa ˙zne sobie ze wzgl ˛edu na jedn ˛a z osi symetrii planszy, (2)
uto ˙zsami´c wszystkie stany równowa ˙zne sobie ze wzgl ˛edu na permutacj ˛e symboli, (3) uruchomi´c
przeszukiwanie dla wszystkich nieto ˙zsamych układów pocz ˛atkowych.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
21 / 48
Algorytm Best-First-Search
Poszukiwanie minimalnych sudoku
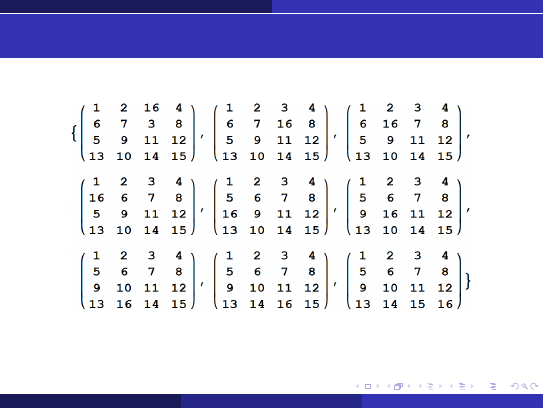
Dla n = 3
Nie udało si ˛e wykona´c programu do ko ´nca przy 2GB pami ˛eci
RAM, a swap’owanie bardzo istotnie spowalnia prac ˛e programu.
Sugestia: mo ˙zna próbowa´c zadanie obliczy´c w sposób
rozproszony (na wielu maszynach).
Udało si ˛e na pewno wykry´c, ˙ze minimalne sudoku 3
2
s ˛a o
liczno´sci pocz ˛atkowej 6 18.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
22 / 48
Algorytm Best-First-Search
Uwagi o Best First Search
Best First Search przeszukuje w gł ˛ab (a nie wszerz) coraz bardziej
oddalaj ˛ac si ˛e od stanu pocz ˛atkowego.
Przy natkni ˛eciu si ˛e na stan niepoprawny (w szczególno´sci, gdy
wszyscy potomkowie s ˛a niepoprawni), algorytm wycofuje si ˛e do
stanów o gorszej warto´sci heurystyki.
Liczba takich wycofa ´n zale ˙zy od: jako´sci podanej heurystyki i od
sposobu budowania stanów potomnych (pewn ˛a wiedz ˛e o
problemie mo ˙zna zawrze´c ju ˙z tu, aby nie dopuszcza´c do stanów
bezpo´srednio niepoprawnych).
Przemysław Kl ˛esk (KMSIiMS, ZUT)
23 / 48
Algorytm A
∗
Własno´sci algorytmu
A
∗
(Hart, Nilsson, Raphael, 1968)
Funkcja decyduj ˛aca o porz ˛adku wyci ˛agania stanów ze zbioru Open jest
sum ˛a dwóch funkcji:
f (v) = g(v) + h(v),
gdzie g(v) wyra ˙za faktyczny koszt (odległo´s´c) przebyty od stanu
pocz ˛atkowego do v, natomiast h(v) jest heurystyk ˛a szacuj ˛ac ˛a koszt
(odległo´s´c) od stanu v do stanu docelowego.
Funkcja h musi by´c tzw.
dopuszczaln ˛a heurystyk ˛a
, tzn. nie wolno jej
przeszacowywa´c kosztu (odległo´sci) do stanu docelowego (o tym
dokładniej jeszcze pó´zniej. . . ).
W zastosowaniach path-finding czy routing (gdzie mamy
fizyczny/geograficzny graf) cz ˛estym i poprawnym wyborem dla h, jest
zwykła odległo´s´c w linii prostej od v do stanu docelowego (na pewno
nie przeszacowujemy).
Przemysław Kl ˛esk (KMSIiMS, ZUT)
24 / 48
Algorytm A
∗
Własno´sci algorytmu
A
∗
(Hart, Nilsson, Raphael, 1968)
W odró ˙znieniu od Best First Search, A
∗
bierze pod uwag ˛e tak ˙ze
g(v), a nie tylko heurystyk ˛e zorientowan ˛a na cel. A zatem w
budowanej ´scie ˙zce z jednej strony preferowane s ˛a stany bliskie
pocz ˛atkowemu, a z drugiej jednocze´snie bliskie ko ´ncowemu (w
sensie minimalizacji tej sumy).
W algorytmie, ka ˙zdy stan v musi mie´c mo ˙zliwo´s´c zapami ˛etania
swoich trzech warto´sci: g(v), h(v), f (v).
Przechodz ˛ac od pewnego stanu v do pewnego stanu w, warto´s´c
funkcji g wyznaczamy jako:
g(w) = g(v) + d(v, w)
, gdzie d(v, w)
oznacza koszt przej´scia z v do w.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
25 / 48
Algorytm A
∗
A
∗
Algorytm
1
Dla stanu pocz ˛atkowego wyznacz warto´s´c h, a nast ˛epnie ustaw:
g = 0, f = 0 + h. Ustaw tak ˙ze pustego poprzednika i wstaw stan
pocz ˛atkowy do zbioru Open.
2
Dopóki zbiór Open pozostaje niepusty powtarzaj:
1
Pobierz (i usu ´n) jeden stan v ze zbioru Open (jest to stan najlepszy w sensie
warto´sci f ).
2
Je ˙zeli v jest stanem docelowym (spełnia warunek stopu), to przerwij cały algorytm
i zwró´c v jako wynik.
3
Wygeneruj wszystkie stany w potomne dla v i dla ka ˙zdego z nich wykonaj:
1
Je ˙zeli stan w wyst ˛epuje w Closed, to nie badaj go dalej.
2
Policz: g(w) = g(v) + d(v, w) i f (w) = g(w) + h(w).
3
Je ˙zeli stan nie wyst ˛epuje w Open, to dodaj go ustawiaj ˛ac v jako jego
poprzednik.
4
Je ˙zeli stan wyst ˛epuje w Open, to podmie ´n w nim warto´sci g i f (oraz
poprzednika), o ile f korzystniejsze, i uaktualnij jego pozycj ˛e w Open.
4
Włó ˙z v do zbioru Closed.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
26 / 48
Algorytm A
∗
Zastosowania
A
∗
Ogólnie: poszukiwanie najkrótszej ´scie ˙zki w grafie. . .
poruszanie si ˛e postaci (boot’ów) w grach komputerowych,
przechodzenie labiryntów,
routing problems,
układanki, łamigłówki, gdzie nale ˙zy dodatkowo zminimalizowa´c
liczb ˛e ruchów (np. puzzle n
2
− 1),
. . .
Przemysław Kl ˛esk (KMSIiMS, ZUT)
27 / 48
Algorytm A
∗
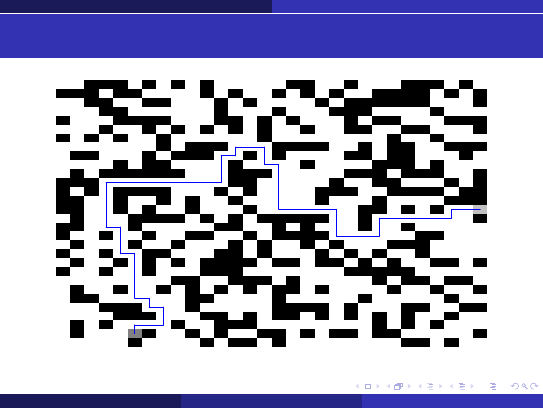
Labirynty — wyniki
A
∗
Rozmiary siatki: 30 × 30, odwiedzonych stanów do momentu rozwi ˛azania: 258.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
28 / 48
Algorytm A
∗
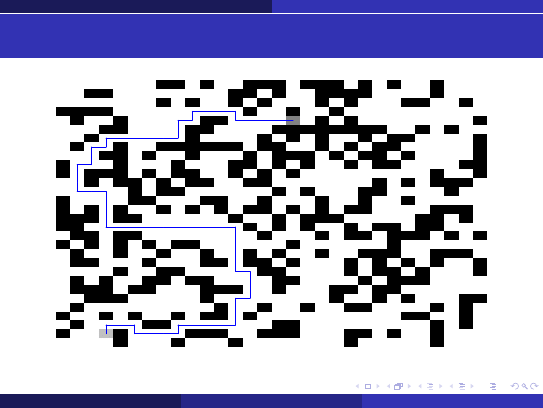
Labirynty — wyniki
A
∗
Rozmiary siatki: 30 × 30, odwiedzonych stanów do momentu rozwi ˛azania: 331.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
29 / 48
Algorytm A
∗
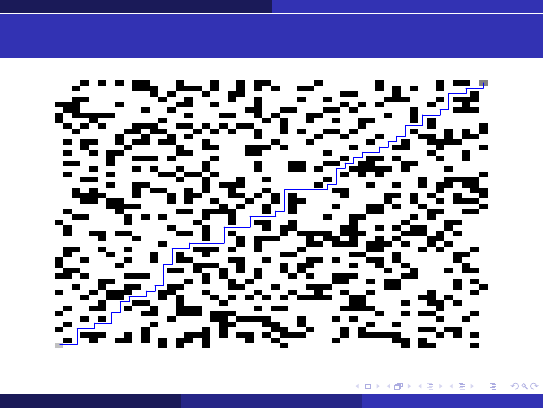
Labirynty — wyniki
A
∗
Rozmiary siatki: 50 × 50, odwiedzonych stanów do momentu rozwi ˛azania: 1441.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
30 / 48
Algorytm A
∗
Dobra i zła (przeszacowuj ˛aca) heurystyka
h(v) =
q
(v
x
− goal
x
)
2
+
(v
y
− goal
y
)
2
lub h(v) = |v
x
− goal
x
| + |(v
y
− goal
y
)|
h(v) =
4
q
(v
x
− goal
x
)
2
+
(v
y
− goal
y
)
2
Przemysław Kl ˛esk (KMSIiMS, ZUT)
31 / 48
Algorytm A
∗
Puzzle n
2
− 1
Dla n = 3
Wychodz ˛ac od stanu pocz ˛atkowego i przesuwaj ˛ac pola z liczbami w
miejsce puste ’9’ (w ogólno´sci niech pole puste równe jest ’n
2
’), nale ˙zy
w jak najmniejszej liczbie ruchów doj´s´c do stanu docelowego:
1
2
3
4
5
6
7
8
9
Przemysław Kl ˛esk (KMSIiMS, ZUT)
32 / 48
Algorytm A
∗
Puzzle n
2
− 1
Przykładowa heurystyka
Dla danego w ˛ezła v niech v
i
x
oraz v
i
y
oznaczaj ˛a
odpowiednio współrz ˛edne x i y, na których poło ˙zona jest
liczba i w układance.
Niech lewe górne pole ma współrz ˛edne (0, 0) a prawe dolne
(n − 1, n − 1).
Przykładowa funkcja heurystyczna mo ˙ze mie´c wówczas
posta´c:
h(v) =
1
2
X
i∈{1,2,...,n
2
}
³
|v
i
x
− ((i − 1) mod n)| + |v
i
y
− ⌊(i − 1)/n⌋|
´
.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
33 / 48
Algorytm A
∗
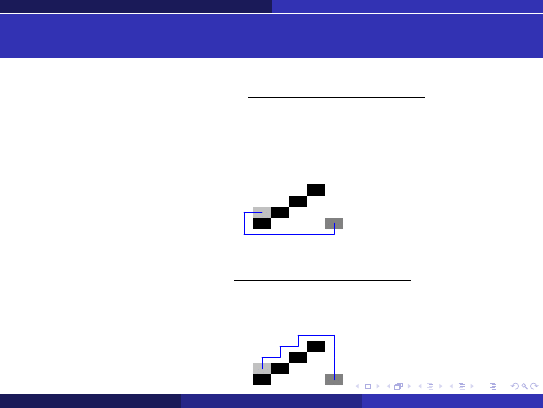
Przykładowa ´scie ˙zka A
∗
dla puzzle 2
2
− 1
Odwiedzonych stanów: 15.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
34 / 48
Algorytm A
∗
Przykładowa ´scie ˙zka
A
∗
dla puzzle 3
2
− 1
Odwiedzonych stanów: 19.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
35 / 48
Algorytm A
∗
Własno´sci A
∗
i monotoniczno´s´c heurystyki
Heurystyka jest na pewno dopuszczalna, je ˙zeli jest monotoniczna, tzn.:
∀v, w h(v) 6 d(v, w) + h(w).
(1)
Innymi słowy, dodanie do jakiejkolwiek ´scie ˙zki dodatkowego w ˛ezła
powoduje, ˙ze nowa ´scie ˙zka jest niekrótsza od poprzedniej. A równo´s´c
mo ˙ze mie´c miejsce tylko, gdy dodamy w ˛ezeł poruszaj ˛ac si ˛e po prostej
do celu.
Je ˙zeli heurystyka h spełnia w/w warunek to algorytm A
∗
gwarantuje, ˙ze:
(1) znalezione rozwi ˛azanie jest optymalne (´scie ˙zka najkrótsza), (2) sam
algorytm jest optymalny w ramach h, tj. ˙zaden inny algorytm u ˙zywaj ˛acy
h jako heurystyki nie odwiedzi mniejszej liczby stanów ni ˙z A
∗
.
Niech h
∗
oznacza doskonał ˛a heurystyk ˛e tj. tak ˛a, która ani nie
przeszacowuje, ani nie niedoszacowuje. Algorytm pracuj ˛acy na
podstawie h
∗
jest tak ˙ze doskonały — odwiedza mo ˙zliwie najmniej
w ˛ezłów. St ˛ad te ˙z oryginalnie rozró ˙zniano dwie nazwy tego algorytmu
A i A
∗
.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
36 / 48
Algorytm A
∗
Jak
A
∗
ma si ˛e do algorytmu Dijkstry i Best
First Search?
Przy ustawieniu ∀v h(v) = 0 algorytm A
∗
staje si ˛e klasycznym
algorytmem Dijkstry do poszukiwania najkrótszej ´scie ˙zki w
grafie z punktu do punktu.
Przy ustawieniu ∀v g(v) = 0 algorytm A
∗
staje si ˛e algorytmem
Best First Search. Nieistotna jest długo´s´c ´scie ˙zki, liczy si ˛e tylko
osi ˛agni ˛ecie/odkrycie rozwi ˛azania/rozwi ˛aza ´n (np. sudoku,
problem n hetmanów).
Przemysław Kl ˛esk (KMSIiMS, ZUT)
37 / 48
Algorytm MIN-MAX
Algorytm
MIN-MAX
(lub MINIMAX)
Stosuje si ˛e do gier dwuosobowych jak np. szachy, warcaby, GO, itp..
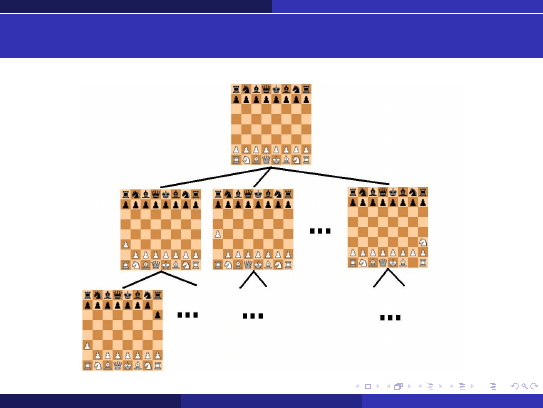
Algorytm w wersji niezmodyfikowanej składa si ˛e z dwóch cz ˛e´sci:
(1)
buduj ˛acej drzewo gry do zadanej gł ˛eboko´sci
(np. poprzez Breadth First
Search),
(2) przechodz ˛acej drzewo od dołu w gór ˛e i nadaj ˛acej oceny
poszczególnym stanom gry
, tak ˙ze w efekcie ocenione zostaj ˛a mo ˙zliwe
ruchy pochodz ˛ace od stanu podstawowego.
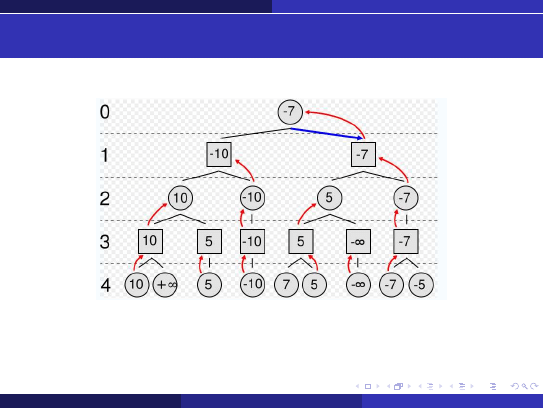
Przechodzenie drzewa w gór ˛e rozpoczyna si ˛e od wystawienia ocen
stanom ko ´ncowym (li´sciom). Zwykle jest to heurystyka np. ró ˙znica
pomi ˛edzy liczb ˛a bierek białych i czarnych.
Nast ˛epnie drzewo przechodzone jest poziomami w gór ˛e. Ka ˙zdy
poziom jest skojarzony z ruchami jednego z graczy.
Jeden z graczy
nazywany jest minimalizuj ˛acym, drugi maksymalizuj ˛acym
.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
38 / 48
Algorytm MIN-MAX
Algorytm
MIN-MAX
(lub MINIMAX)
Zwyci ˛estwo gracza maksymalizuj ˛acego reprezentowane jest przez ∞
(w szachach: białe matuj ˛a czarne), a minimalizuj ˛acego −∞ (czarne
matuj ˛a białe).
Pozycje inne ni ˙z zwyci ˛eskie musimy ocenia´c heurystycznie. Np. jedna z
najprostszych heurystyk dla szachów mierzy ró ˙znic ˛e pomi ˛edzy
„materiałem” białych a czarnych, licz ˛ac piony za 1 pkt., skoczki za 3
pkt., go ´nce za 3.5 pkt, wie ˙ze za 5 pkt., hetmana za 9 pkt.
Tylko poziom najni ˙zszy (stany li´scie) jest oceniany heurystycznie.
Oceny dla wy ˙zszych poziomów wynikaj ˛a z minimaksowej procedury
przechodzenia drzewa w gór ˛e.
Uwaga: w literaturze ruch jednego z graczy nazywany jest cz ˛esto
półruchem (ang. ply)
, a przesuwanie si ˛e o jeden poziom w drzewie
liczone jest jako ±
1
2
. Dopiero 2 ruchy obu graczy traktowane s ˛a jako całe
posuni ˛ecie.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
39 / 48
Algorytm MIN-MAX
Ilustracja fragmentu drzewa gry dla szachów
Przemysław Kl ˛esk (KMSIiMS, ZUT)
40 / 48
Algorytm MIN-MAX
Algorytm
MIN-MAX
(lub MINIMAX)
Rysunek:
´
Zródło: http://en.wikipedia.org/wiki/Image:Minimax.svg
Przemysław Kl ˛esk (KMSIiMS, ZUT)
41 / 48
Algorytm MIN-MAX
Algorytm MIN-MAX rekurencyjnie
Procedura mmEvaluateMax(s, d, D)
1
Je ˙zeli s jest terminalem, to zwró´c h(s).
2
Przypisz v = −∞.
3
Dla wszystkich stanów t b ˛ed ˛acych potomkami s wykonuj:
1
v := max{v, mmEvaluateMin(t, d +
1
2
, D)
}.
4
Zwró´c v.
Procedura mmEvaluateMin(s, d, D)
1
Je ˙zeli s jest terminalem, to zwró´c h(s).
2
Przypisz v = ∞.
3
Dla wszystkich stanów t b ˛ed ˛acych potomkami s wykonuj:
1
v := min{v, mmEvaluateMax(t, d +
1
2
, D)
}.
4
Zwró´c v.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
42 / 48
Algorytm MIN-MAX
Algorytm
MIN-MAX
(lub MINIMAX)
Podstawowym problemem algorytmu w wersji niezmodyfikowanej jest
du ˙za zło ˙zono´s´c pami ˛eciowa. Niech dla uproszczenia b oznacza ´sredni ˛a
lub stał ˛a liczb ˛e ruchów dost ˛epn ˛a na ka ˙zdym poziomie dla ka ˙zdego z
graczy (dla szachów b ≈ 40). Wówczas przejrzenie D poziomów
gł ˛eboko´sci wymaga O(b · b · · · b
|ÃÃÃ{zÃÃÃ}
D
) =
O(b
D
)
pami ˛eci.
Najbardziej znan ˛a modyfikacj ˛a algorytmu, która redukuje w pewnym
stopniu zło ˙zono´s´c pami ˛eciow ˛a, jest
przycinanie α-β (ang. α-β cutoffs)
.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
43 / 48
Algorytm MIN-MAX
Algorytm
MIN-MAX
(lub MINIMAX)
Efekt horyzontu
Z uwagi na ograniczon ˛a gł ˛eboko´s´c przeszukiwania, algorytm mo ˙ze
cierpie´c na tzw.
efekt horyzontu
— nast ˛epny ruch poza najgł ˛ebszym
przejrzanym poziomem mo ˙ze okaza´c si ˛e katastrofalny dla jednego z
graczy, mimo ˙ze poziom wy ˙zej oceny s ˛a dla niego korzystne (np. w
szachach nie rozpatrzenie a ˙z do tzw. pozycji martwej kombinacji zbi´c).
Przemysław Kl ˛esk (KMSIiMS, ZUT)
44 / 48
Algorytm przycinanie α-β
Algorytm
przycinanie α-β
(ang. α-β cut-offs lub α-β pruning)
Wielu niezale ˙znych odkrywców: Samuel (1952), McCarthy (1956), Newell i Simon (1958).
W trakcie analizy drzewa propagowane s ˛a w dół i gór ˛e drzewa warto´sci:
α — gwarantowana dotychczas wypłata gracza maksymalizuj ˛
acego
,
β — gwarantowana dotychczas wypłata gracza minimalizuj ˛
acego
.
W wywołaniu dla korzenia zadaje si ˛e α = −∞, β = ∞.
Dzieci (i ich poddrzewa) s ˛a analizowane dopóki α < β.
W momencie gdy α > β, przestajemy rozpatrywa´c kolejne dzieci (i ich poddrzewa) — nie
b ˛ed ˛a one miały wpływu na wynik całego drzewa, s ˛a wynikiem nieoptymalnego
post ˛epowania graczy.
W optymistycznym przypadku zysk w zło˙zono´sci wzgl ˛edem MIN-MAX’a z O(b
D
) na
O
³
b
D/2
´
=
O
³
√
b
D
´
, gdzie b — branching factor (stały lub ´sredni współczynnik
rozgał ˛eziania). Np. dla szachów b ≈ 40.
Dzi ˛eki zyskowi w zło ˙zono´sci mo ˙zna szuka´c gł ˛ebiej.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
45 / 48
Algorytm przycinanie α-β
Algorytm
przycinanie α-β
Procedura fsAlphaBetaEvaluateMax(s, d, D, α, β)
1
Je ˙zeli s jest terminalem, to zwró´c h(s).
2
Dla wszystkich stanów t b ˛ed ˛acych potomkami s wykonuj:
1
v := fsAlphaBetaEvaluateMin(t, d +
1
2
, D, α, β).
2
α := max
{α, v}.
3
Je ˙zeli α > β, to zwró´c α.
(przyci ˛ecie)
3
Zwró´c α.
Procedura fsAlphaBetaEvaluateMin(s, d, D, α, β)
1
Je ˙zeli s jest terminalem, to zwró´c h(s).
2
Dla wszystkich stanów t b ˛ed ˛acych potomkami s wykonuj:
1
v := fsAlphaBetaEvaluateMax(t, d +
1
2
, D, α, β).
2
β := min
{β, v}.
3
Je ˙zeli α > β, to zwró´c β.
(przyci ˛ecie)
3
Zwró´c β.
Przemysław Kl ˛esk (KMSIiMS, ZUT)
46 / 48
Algorytm przycinanie α-β
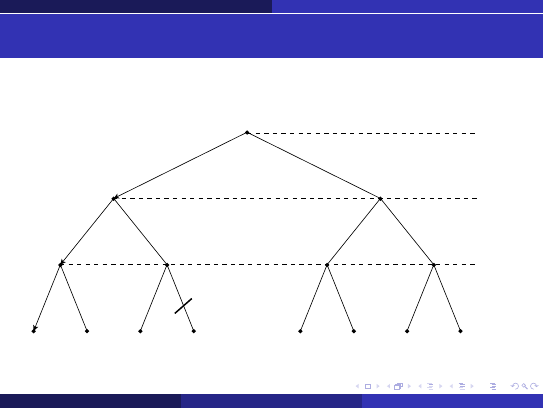
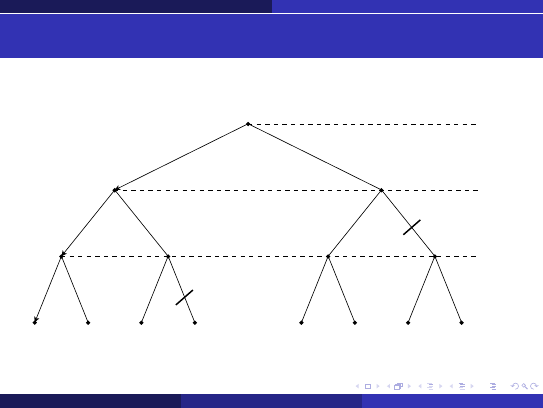
Ilustracja przycinania α-β — przykład 1
MAX
MIN
MAX
α =
−∞
β =
∞, 5
α =
−∞, 5
β =
∞
α =
−∞, 5
β =
∞
5
4
α =
−∞, 6
β = 5
α = 5, 7, 10
β =
∞
α = 5
β =
∞, 10, 5
α = 5
β = 10
6
∗
7
10
4
4
Przemysław Kl ˛esk (KMSIiMS, ZUT)
47 / 48
Algorytm przycinanie α-β
Ilustracja przycinania α-β — przykład 2
MAX
MIN
MAX
α =
−∞
β =
∞, 5
α =
−∞, 5
β =
∞
α =
−∞, 5
β =
∞
5
4
α =
−∞, 6
β = 5
α = 5
β =
∞
α = 5
β =
∞, 5
6
∗
3
2
*
*
Przemysław Kl ˛esk (KMSIiMS, ZUT)
48 / 48
Document Outline
- Algorytm Breadth-First-Search
- Algorytm Best-First-Search
- Algorytm A*
- Algorytm MIN-MAX
- Algorytm przycinanie -
Wyszukiwarka
Podobne podstrony:
Chirurgia wyk. 8, In Search of Sunrise 1 - 9, In Search of Sunrise 10 Australia, Od Aśki, [rat 2 pos
Nadczynno i niezynno kory nadnerczy, In Search of Sunrise 1 - 9, In Search of Sunrise 10 Austral
PBM ver3
Jobs places vehicles search
Harmonogram ćw. i wyk, In Search of Sunrise 1 - 9, In Search of Sunrise 10 Australia, Od Aśki, [rat
Food Elementary Word Search id Nieznany
EasyRGB The inimitable RGB and COLOR search engine!
Słownictwo 4 - search history, Terminologia
chirurgia wyk 7, In Search of Sunrise 1 - 9, In Search of Sunrise 10 Australia, Od Aśki, [rat 2 pose
projekt cupial ver3
spalanie testy, ściągi, Spalanie wykład ver3, TEST 2
spalanie testy, ściągi, Spalanie wykład ver3, TEST 2
Jobs search preint
DD Searchcoil Homade
226 Example 1 FAT Search)
inf egzam ver3
Colours Animals Food Numbers Word Search
więcej podobnych podstron