FALOWNIKI NAPIĘCIA
Falowniki napięcia są to przekształtniki, których zadaniem jest generowanie na wyjściu napięcia
o regulowanej częstotliwości i regulowanej wartości skutecznej. Falowniki napięcia zasilane są ze
źródła napięcia o stałej lub regulowanej wartości (najczęściej prostownik niesterowany).
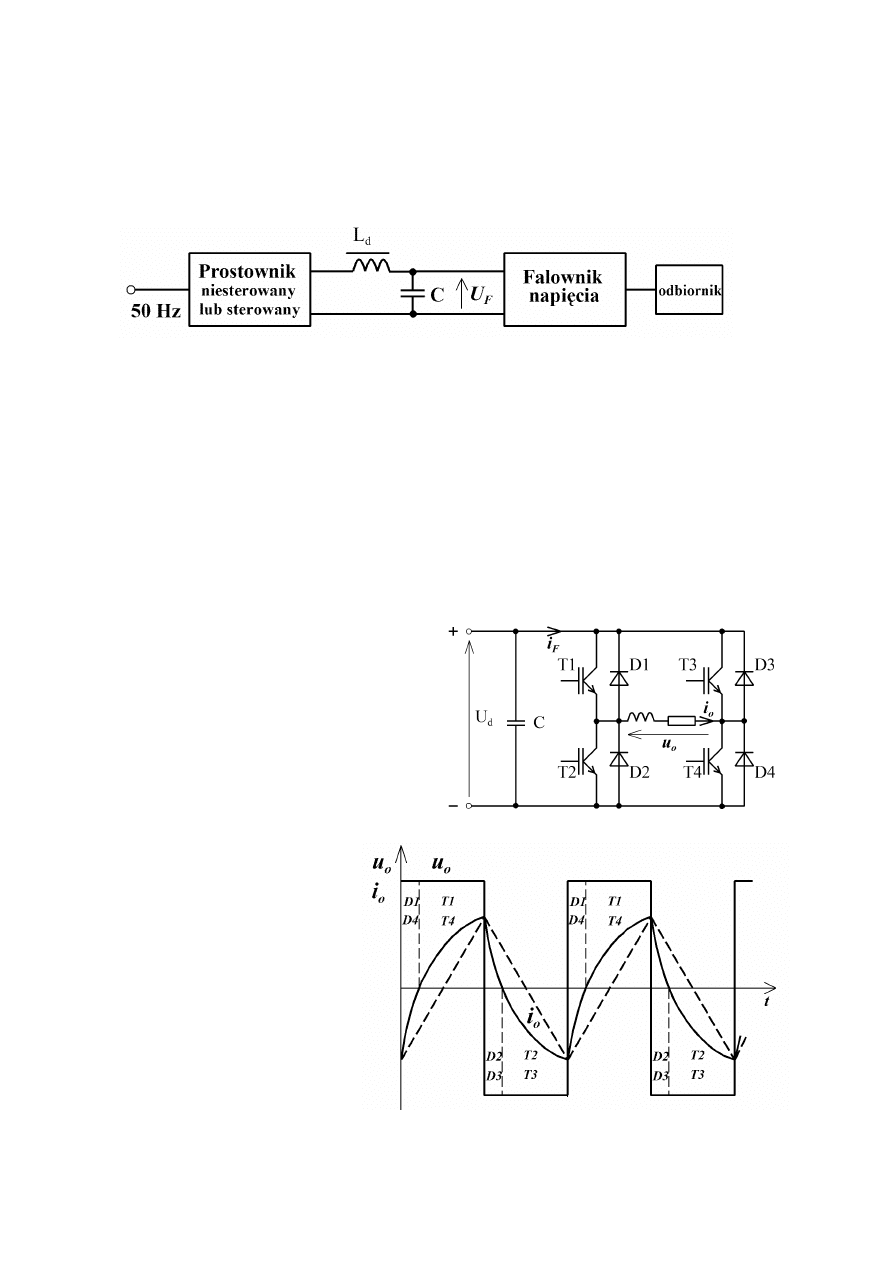
Rys. 4.1. Schemat blokowy układu z falownikiem napięcia
Kondensator C ( najczęściej o pojemności kilku lub kilkunastu mF) musi być dołączony do
zacisków wejściowych falownika, natomiast dławik L
d
jest elementem opcjonalnym.
Falowniki napięcia dzieli się na dwie zasadnicze grupy:
• falowniki generujące na wyjściu napięcie w postaci fali prostokątnej,
• falowniki z modulacją szerokości impulsów (PWM).
•
Jednofazowy falownik napięcia
Tranzystory wysterowywane są do
Rys. 4.2. Jednofazowy falownik napięcia
przewodzenia parami: T1, T4 oraz T2, T3.
Po wyłączeniu pary tranzystorów T1, T4 prąd
odbiornika zamyka się przez diodę D3,
kondensator C (lub źródło napięcia) oraz przez
diodę D2. Prąd odbiornika zdąża do zera.
Napięcie na odbiorniku ma kształt
przebiegu prostokątnego, natomiast
Rys. 4.3. Napięcie i prąd odbiornika zasilanego przez
jednofazowy falownik napięcia: linia ciągłą –
odbiornik RL, linia przerywana – odbiornik L
kształt prądu zależy od charakteru
odbiornika.
Częstotliwość zmian napięcia oraz
prądu odbiornika reguluje się przez
zmianę częstotliwości załączania par
tranzystorów.
Regulacja wartości skutecznej
napięcia i prądu odbiornika wymaga
(w tym przypadku sterowania
tranzystorów) zmiany wartości
napięcia źródła zasilania.
Trójfazowy falownik napięcia
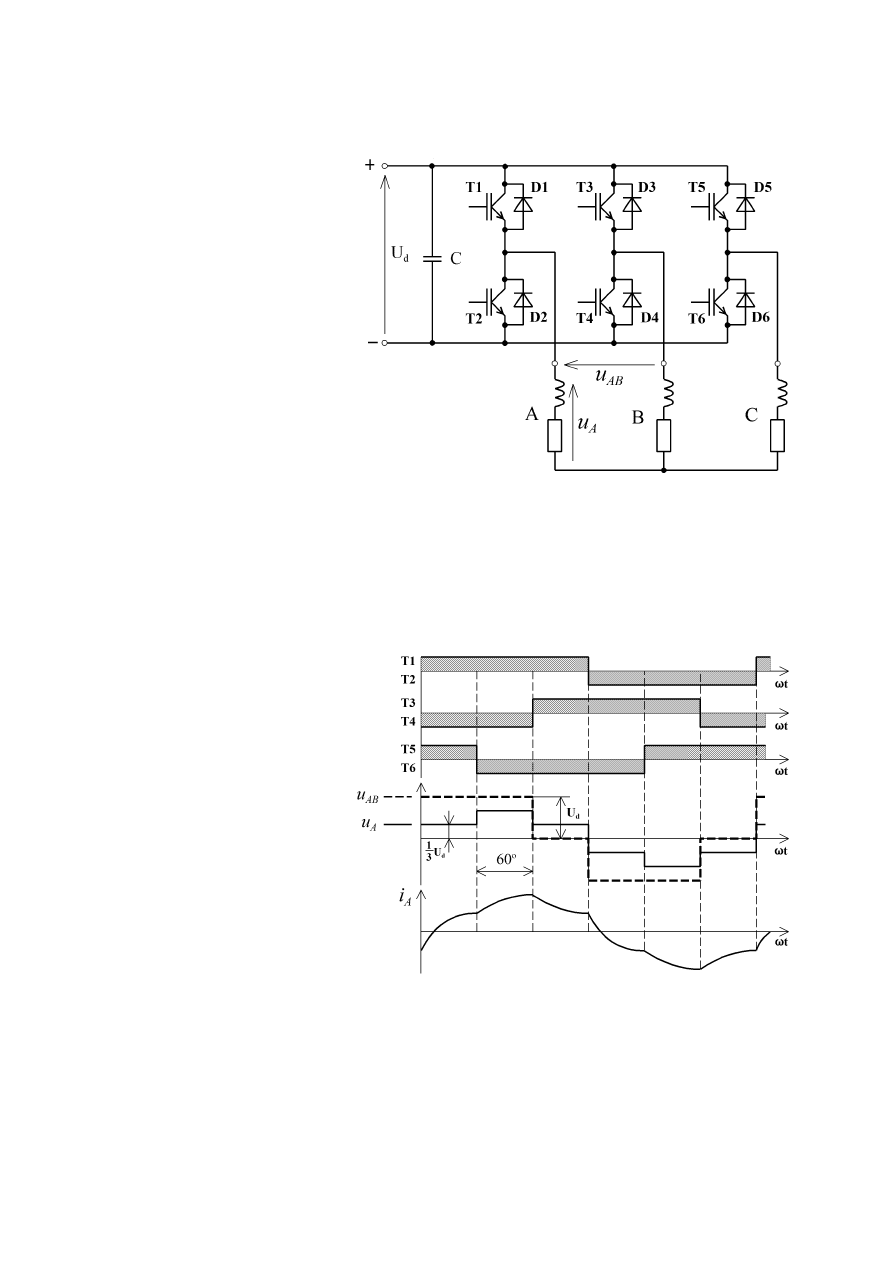
Rys. 4.4. Trójfazowy falownik napięcia
Jeśli falownik ma generować na
wyjściu napięcie w postaci fali
prostokątnej, to każdy z tranzys-
torów wysterowany jest do
przewodzenia przez pół okresu
pracy falownika.
Załączanie tranzystorów T3 oraz
T5 przesunięte jest względem
załączenia tranzystora T1 odpo-
wiednio o kąt 120
o
(2/3π) i kąt
240
o
(4/3π).
Załączanie tranzystorów T2, T4
oraz T6 przesunięte jest względem
załączania tranzystorów T1, T3
oraz T5 o kąt 180
o
(pół okresu).
Nie mogą być załączone jednocześnie dwa tranzystory w tej samej gałęzi !
Rys. 4.5. Diagram sterowania tranzystorów oraz kształt
napięcia fazowego, napięcia przewodowego oraz prądu
odbiornika RL połączonego w gwiazdę
Przy takim sposobie sterowania
napięcie wyjściowe falownika
(tym samym prąd odbiornika)
charakteryzuję się dużą zawar-
tością wyższych harmonicznych,
co jest cechą niekorzystną tego
typu sterowania tranzystorów.
Wartość skuteczną napięcia
wyjściowego reguluje się przez
zmianę napięcia zasilającego
falownik: w tym przypadku
falownik zasilany jest najczęściej
za pomocą prostownika
sterowanego.
2
Modulacja szerokości impulsów
(Pulse width modulation - PWM)
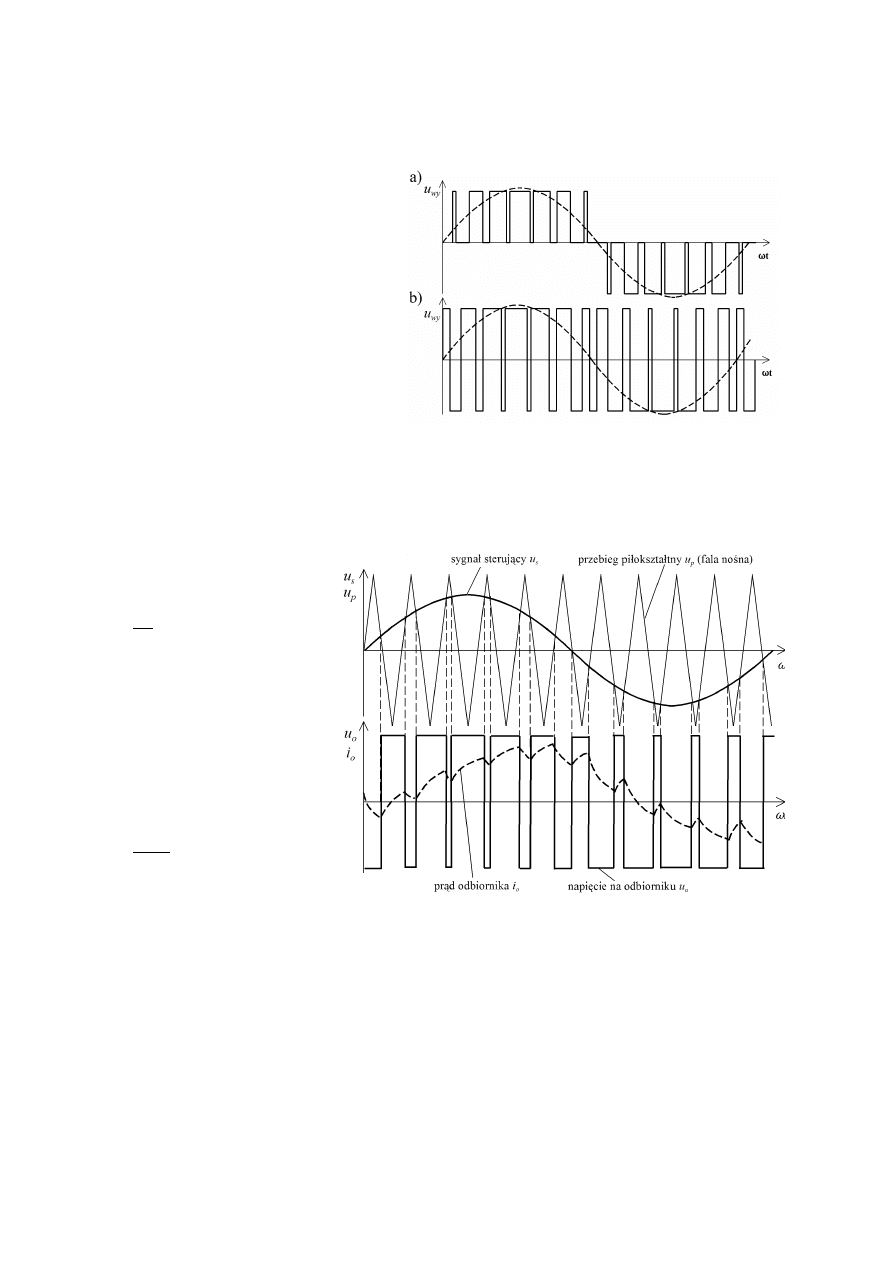
Rys. 4.6. Napięcie wyjściowe falownika: a) przy
modulacji jednobiegunowej, b) przy modulacji
dwubiegunowej
Napięcie wyjściowe falownika
ma postać ciągu impulsów
prostokątnych (uni- lub bipolarnych)
o stałej amplitudzie i zmiennej
szerokości trwania impulsów.
Taki kształt napięcia charakteryzuje się
znacznie mniejszą zawartością wyższych
harmonicznych w porównaniu z przebie-
giem napięcia w postaci fali prostokątnej.
Rys. 4.7. Modulacja fali nośnej u
p
sinusoidalnym przebiegiem
sterującym u
s
oraz przykładowy kształt napięcia i prądu
odbiornika RL zasilanego przez falownik jednofazowy PWM
Współczynnik modulacji
częstotliwości:
s
p
f
f
f
m
=
,
gdzie: f
p
– częstotliwość
przebiegu piłokształtnego,
(fali nośnej),
f
s
– częstotliwość przebiegu
sterującego.
Współczynnik modulacji
amplitudy:
sm
s
a
U
U
m
=
,
gdzie: U
s
– amplituda sygnału
sterującego, U
sm
– amplituda
sygnału sterującego przy której
szerokość impulsu ma najwięk-
szą wartość.
Sygnał sterujący (najczęściej sinusoidalny) ma taką częstotliwość f
s
, jaką ma mięć
napięcie wyjściowe falownika. Sinusoidalny sygnał sterujący zastępowany jest często funkcją
cyfrowego). Niekiedy sinusoidalna funkcja sterująca zastępowana jest przebiegiem trapezowym.
schodkową, której obwiednia jest sinusoidą (upraszcza to algorytm obliczeń w układach sterowania
Częstotliwość f
p
przebiegu piłokształtnego (symetrycznego lub niesymetrycznego)
powinna być co najmniej kilkanaście razy większa od częstotliwości przebiegu sterującego f
s
.
Częstotliwość f
p
wynosi przeciętnie od 1 kHz do kilkunastu kHz.
3
Amplituda sygnału sterującego może być większa od amplitudy przebiegu
piłokształtnego (wówczas występuje tzw. przemodulowanie).
Regulacja wartości skutecznej napięcia wyjściowego dokonywana jest przez zmianę
amplitudy sygnału sterującego (regulacja w układzie sterowania falownika). Dlatego też
falowniki pracujące z modulacją szerokości impulsów (PWM) zasilane są najczęściej przez
prostowniki niesterowalne (diodowe).
Wyjściowe napięcie przewodowe (w postaci ciągu impulsów) przyjmuje trzy wartości
napięcia: – U
d
, 0, + U
d
. Napięcie fazowe odbiornika oprócz wartości –2/3U
d
, –1/3U
d
, +1/3U
d
oraz
-+2/3U
d
przyjmuje także wartość zero (jest to równoznaczne ze zwarciem zacisków odbiornika).
Metody sterowania w falownikach napięcia
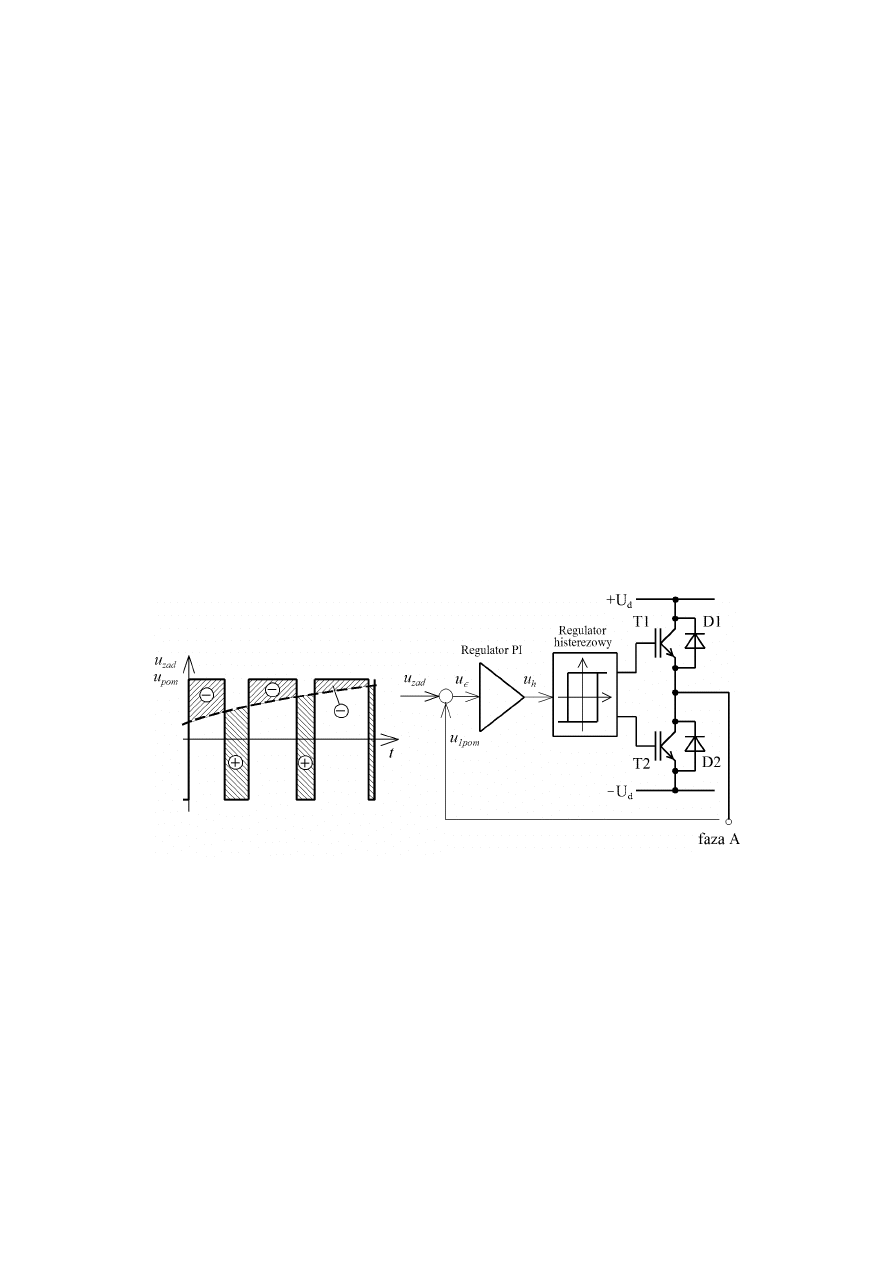
1. Metoda nadążnego kształtowania przebiegu czasowego napięcia wyjściowego
Podstawowa harmoniczna napięcia wyjściowego falownika powinna zmieniać się tak jak zadany
przebieg napięcia wyjściowego. Różnica między sygnałem zadanym a sygnałem
odzwierciedlającym wartość napięcia wyjściowego falownika wprowadzana jest na wejście
regulatora PI, którego wyjście steruje pracą regulatora histerezowego. Sygnał wyjściowy
regulatora histerezowego steruje pracą tranzystorów danej fazy falownika.
Rys. 4.8. Zasada oraz układ sterowania w metodzie nadążnego kształtowania
przebiegu czasowego napięcia wyjściowego: linia ciągła – rzeczywisty przebieg
napięcia, linia przerywana –przebieg zadany
2. Metoda nadążnego kształtowania przebiegu czasowego prądu odbiornika
Prąd odbiornika może zmieniać się tylko w założonych granicach. Jeśli prąd fazy A
odbiornika osiągnie dolną wartość zadaną i–∆i (rys. 4.9), to następuje załączenie tranzystora T1,
prąd narasta (lub zdąża do zera, jeśli ma wartość ujemną). Gdy prąd osiągnie górną wartość i+∆i,
to następuje wyłączenie tranzystora T1, a do przewodzenia zostaje wysterowany tranzystor T2.
Jeśli prąd ma wartości dodatnie, to prąd po wyłączeniu T1 będzie płynął przez diodę D1;
tranzystor T2, zacznie przewodzić prąd, jeśli zmaleje on do zera i zmieni kierunek.
W tym przypadku sterowania występuje pełna kontrola prądu płynącego przez poszczególne
tranzystory.
4
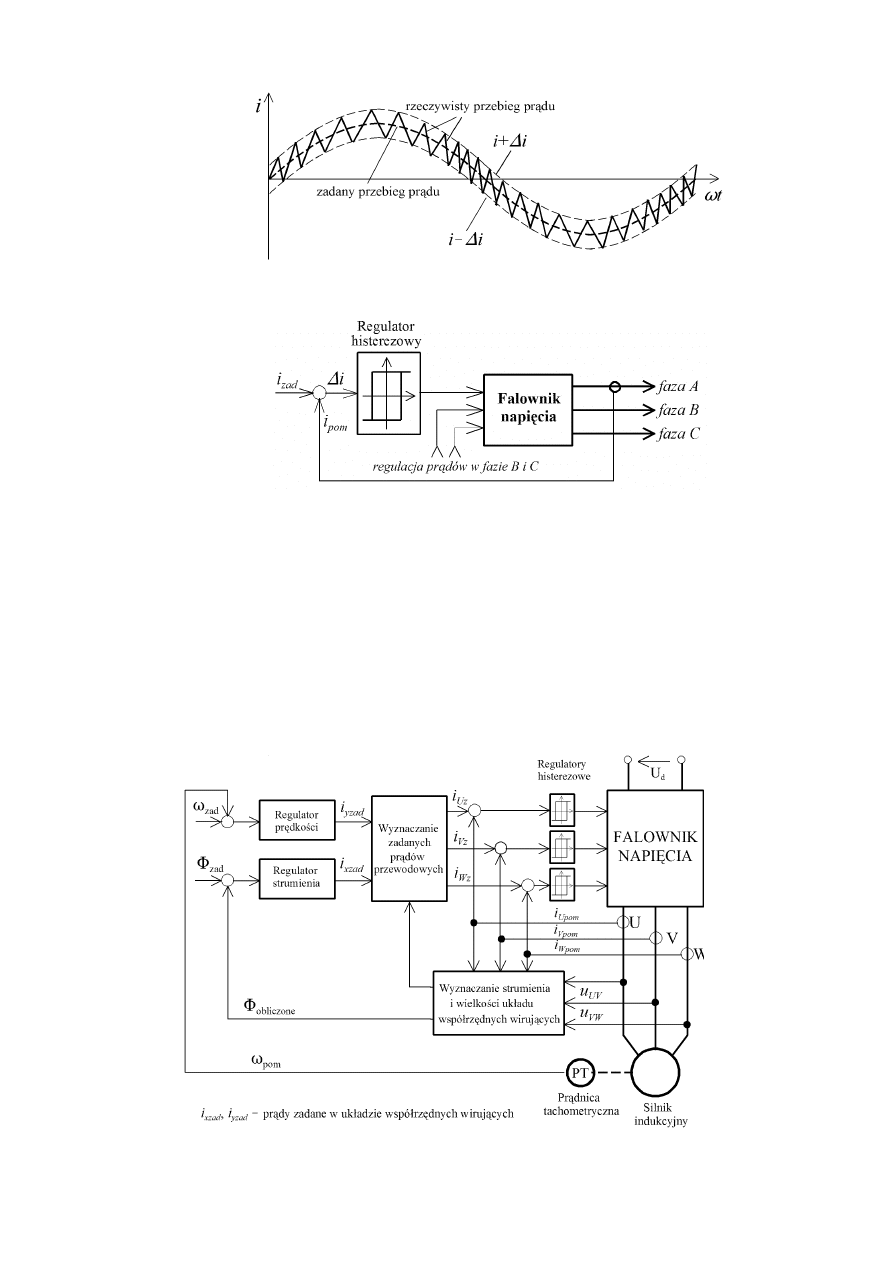
Rys. 4.9. Zadane granice zmian prądu odbiornika oraz rzeczywisty
przebieg prądu odbiornika
Rys. 4.10. Sterowanie pracą falownika w metodzie nadążnego
kształtowania przebiegu czasowego prądu odbiornika
3. Metoda sterowania z orientacją wektora pola przy wymuszaniu prądów w odbiorniku
Z uwagi na zależność momentu silnika indukcyjnego od wszystkich prądów odbiornika
nastawianie momentu silnika indukcyjnego wymaga realizacji sterowania w oparciu o zastępcze
prądy silnika w odpowiednim układzie tzw. współrzędnych wirujących. Na podstawie pomiaru
wszystkich trzech prądów odbiornika oraz dwóch napięć przewodowych wyznaczane są żadne
wartości zastępczych prądów silnika, a następnie za pomocą odpowiedniej transformacji prądy
zastępcze przeliczane są na zadane wartości prądów odbiornika.
Rys. 4.11. Schemat blokowy układu sterowania z orientacją wektora pola przy
wymuszeniu prądów w odbiorniku
5
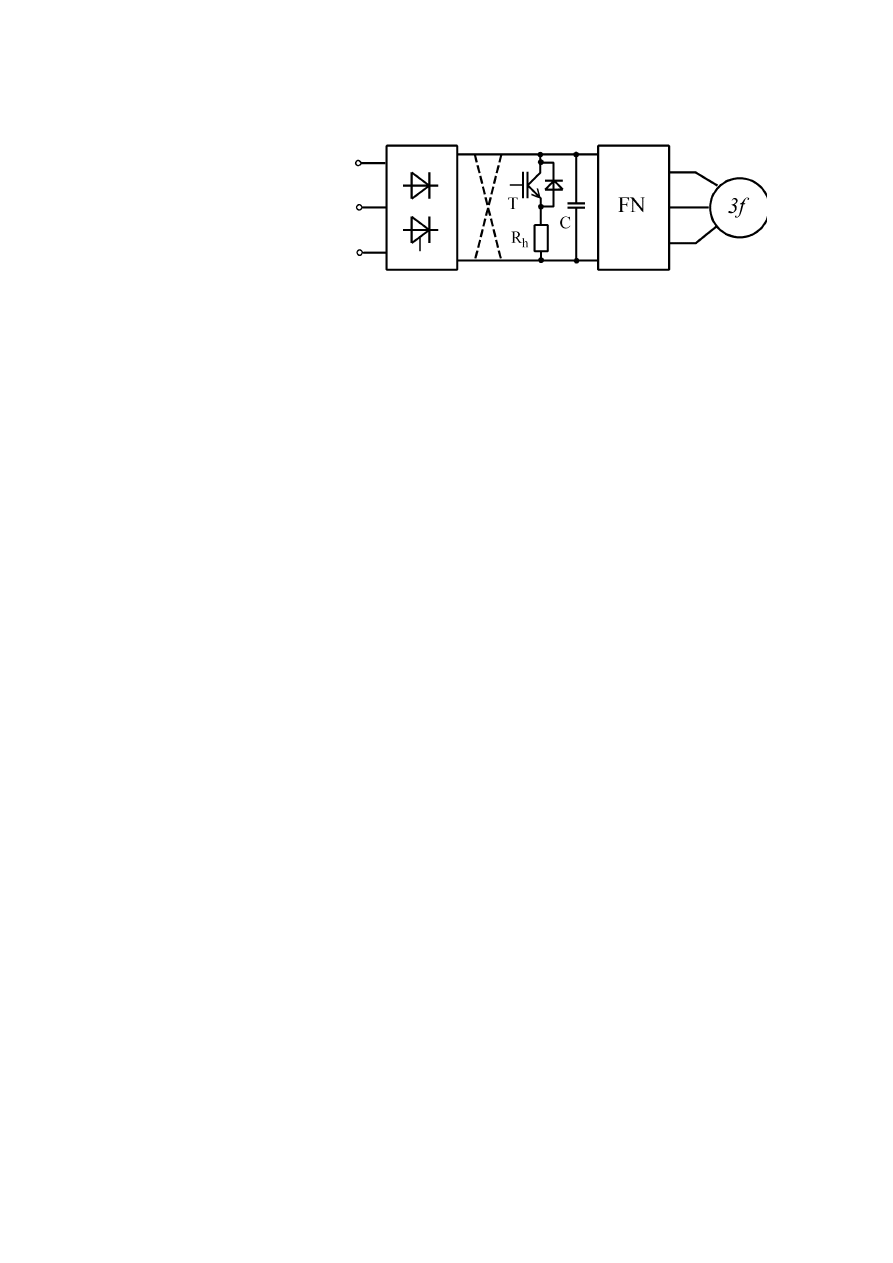
Hamowanie silników indukcyjnych zasilanych z falowników napięcia
Podczas hamowania silnika
Rys. 4.13. Układ hamowania silnika indukcyjnego
zasilanego z falownika napięcia
indukcyjnego częstotliwość
pracy falownika jest odpowiednio
zmniejszana względem częstotli-
wości odpowiadającej prędkości
obrotowej silnika indukcyjnego.
Energia oddawania przez silnik
indukcyjny jest wydzielana na
dodatkowym rezystorze R
h
za
pomocą odpowiedniego załączania tranzystora T lub oddawana do sieci trójfazowej, ale wówczas
prostownik zasilający falownik musi być prostownikiem tyrystorowym wysterowanym do pracy
malowniczej.
6
Wyszukiwarka
Podobne podstrony:
Elementy energoelektroniczne III Energetyka
Szereg napięciowy metali, Energetyka, I rok, chemia
Napęd prądu przemiennego z falownikiem napięcia
falownik napiecia rafa, Studia, Napędy elektryczne, od marcina, ne, 1Napędy elektryczne, Napędy elek
Prostowniki III Energetyka
Źródła napięciowe i prądowe, Energetyka I stopień PŚk, sem1 Elektrotechnika, ćwiczenia elektrotechni
falownik napiecia, Studia, Napędy elektryczne, od marcina, ne, 1Napędy elektryczne, Napędy elektrycz
falownik napiecia Maciek, Studia, Napędy elektryczne, od marcina, ne, 1Napędy elektryczne, Napędy el
cw2 - Falownik napięcia [koniec]
Falowniki napięcia są to przekształtniki
Elementy energoelektroniczne III Energetyka
Falowniki napieciowe Kapka
Sterowniki AC III Energetyka
Jednofazowy falownik napięcia schemat
cw05-protokol, Politechnika Wrocławska Energetyka, III semestr, Materiały
więcej podobnych podstron