Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
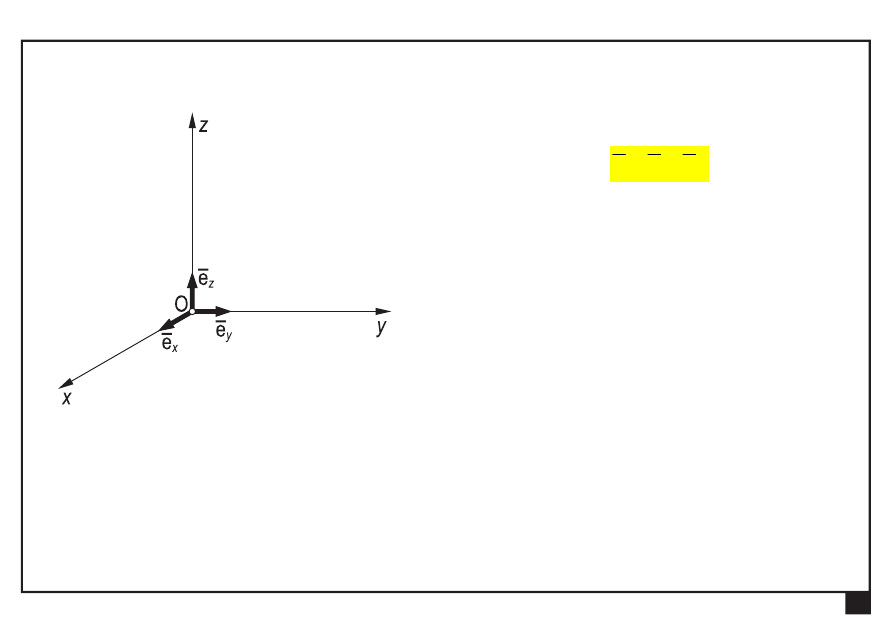
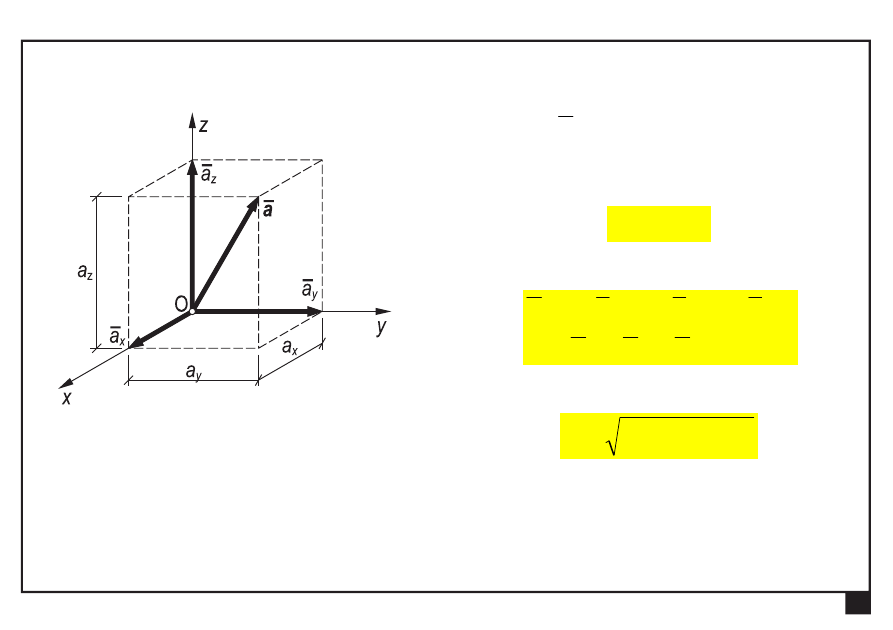
Przestrzenny kartezjański układ współrzędnych
wersory
z
y
x
e
,
e
,
e
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
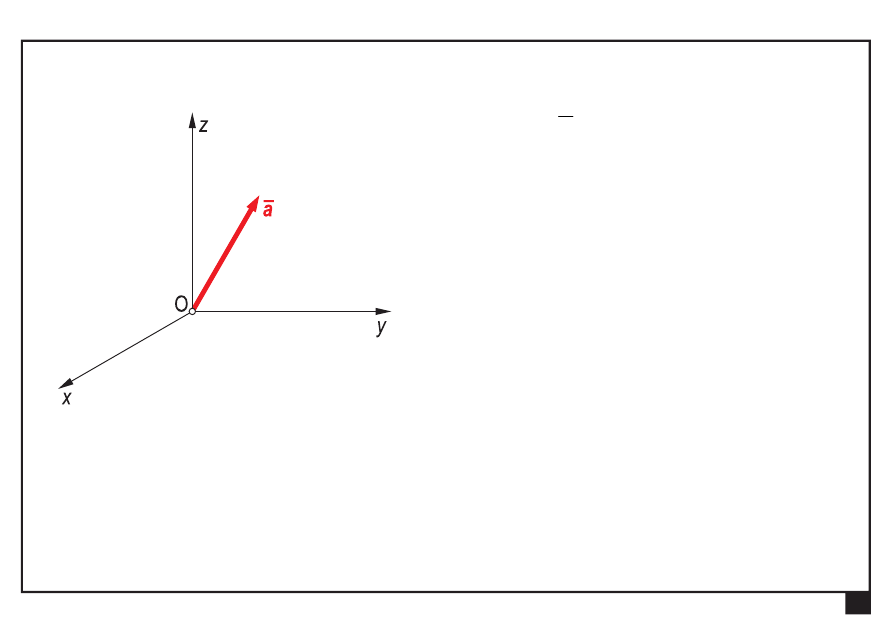
Przestrzenny kartezjański układ współrzędnych
wektor
a

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
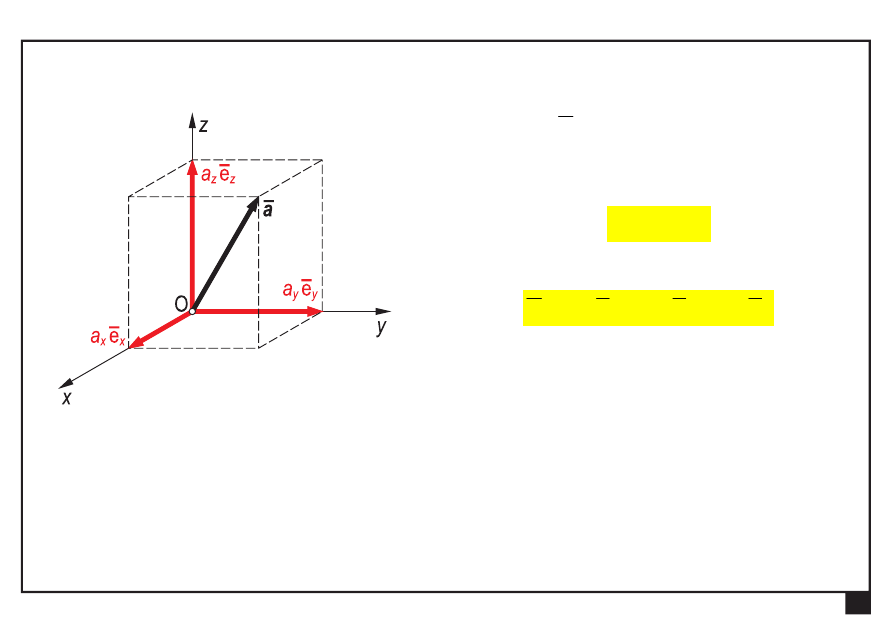
Przestrzenny kartezjański układ współrzędnych
wektor
a
— składowe wektora
z
y
x
a
a
a
,
,
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
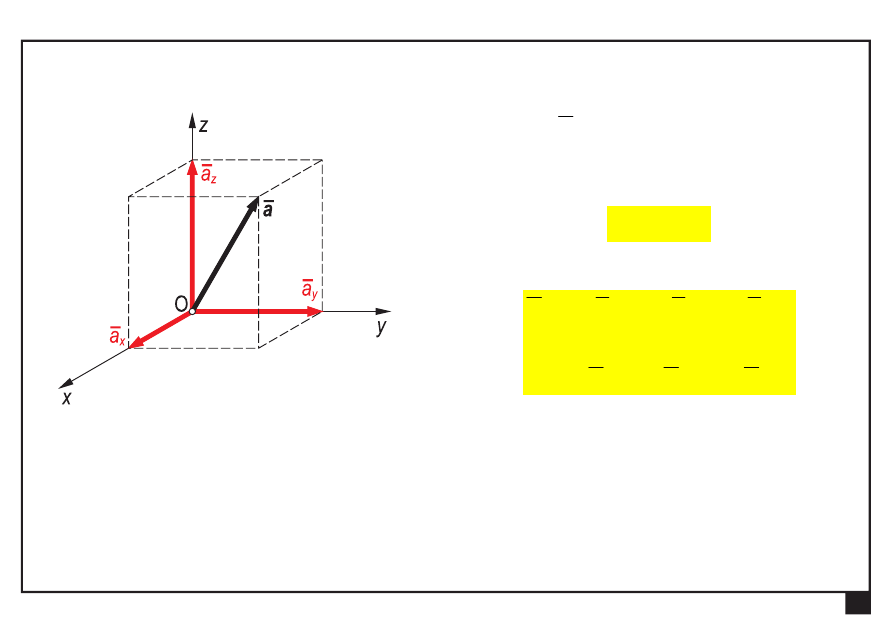
Przestrzenny kartezjański układ współrzędnych
wektor
a
— składowe wektora
z
y
x
a
a
a
,
,
— zapis analityczny
z
z
y
y
x
x
a
a
a
a
e
e
e
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Przestrzenny kartezjański układ współrzędnych
wektor
a
— składowe wektora
z
y
x
a
a
a
,
,
— zapis analityczny
z
y
x
z
z
y
y
x
x
a
a
a
a
a
a
a
e
e
e
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Przestrzenny kartezjański układ współrzędnych
wektor a
— składowe wektora
z
y
x
a
a
a
,
,
— zapis analityczny
z
y
x
z
z
y
y
x
x
a
a
a
a
a
a
a
e
e
e
— moduł (wartość) wektora
2
2
2
z
y
x
a
a
a
a

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Przestrzenny kartezjański układ współrzędnych
wektor
a
— kosinusy kierunkowe
wektora
a
a
x
x
cos
a
a
y
y
cos
a
a
z
z
cos
1
cos
cos
cos
2
2
2
z
y
x

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Wektory swobodne, liniowe i zaczepione
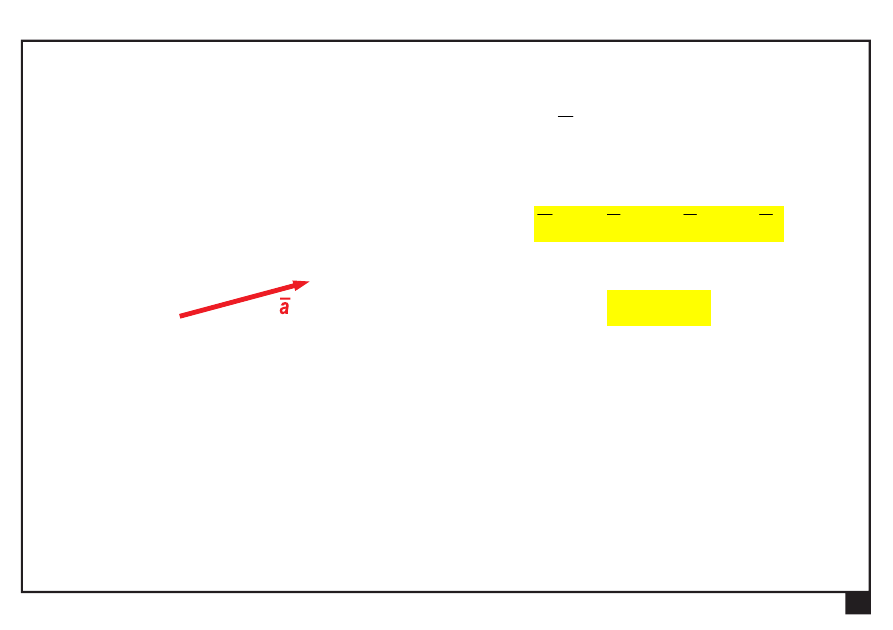
wektor swobodny
— wartość
— zwrot
— kierunek
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
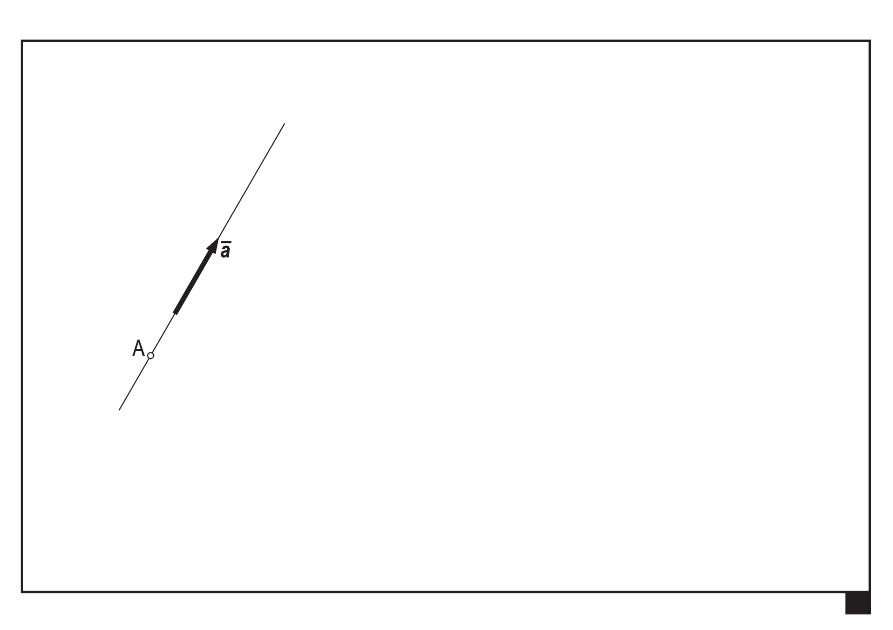
Wektory swobodne, liniowe i zaczepione
wektor liniowy
— wartość
— zwrot
— prosta działania
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
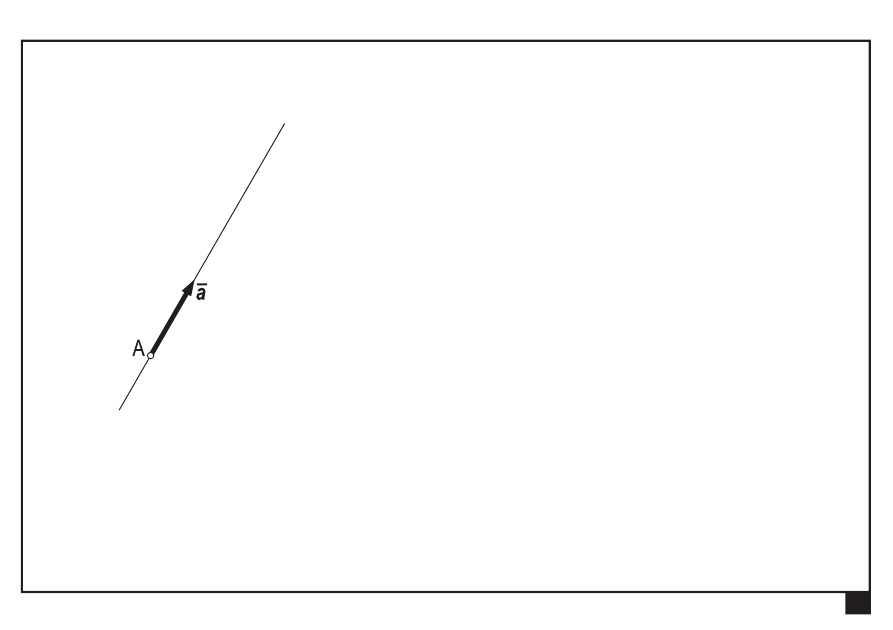
Wektory swobodne, liniowe i zaczepione
wektor zaczepiony
— wartość
— zwrot
— prosta działania
— punkt zaczepienia
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Zmiana zwrotu wektora
wektor a
— zapis analityczny
z
z
y
y
x
x
a
a
a
a
e
e
e
— składowe
z
y
x
a
a
a
,
,

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Zmiana zwrotu wektora
wektor b o zwrocie przeciwnym
a
b
z
z
y
y
x
x
a
a
a
b
e
e
e
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
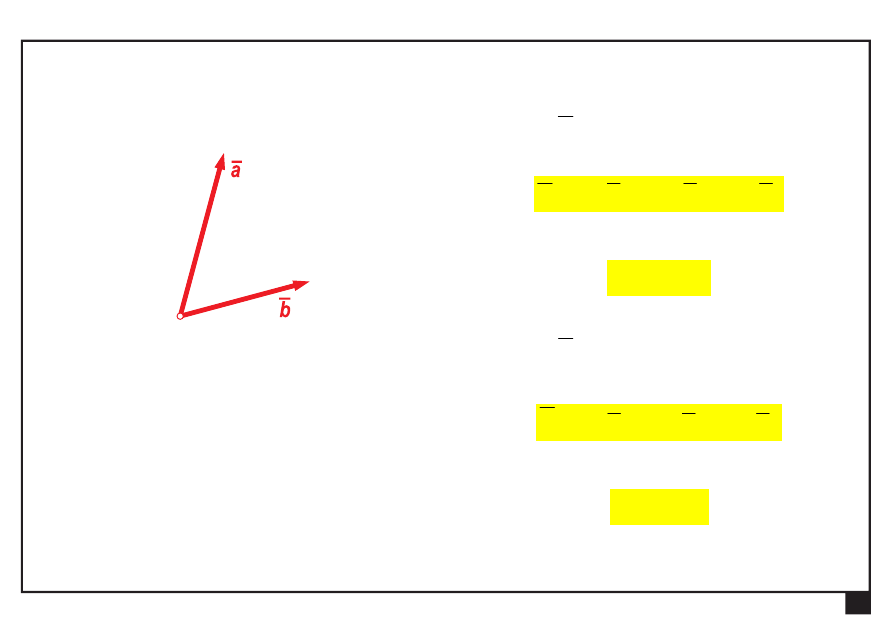
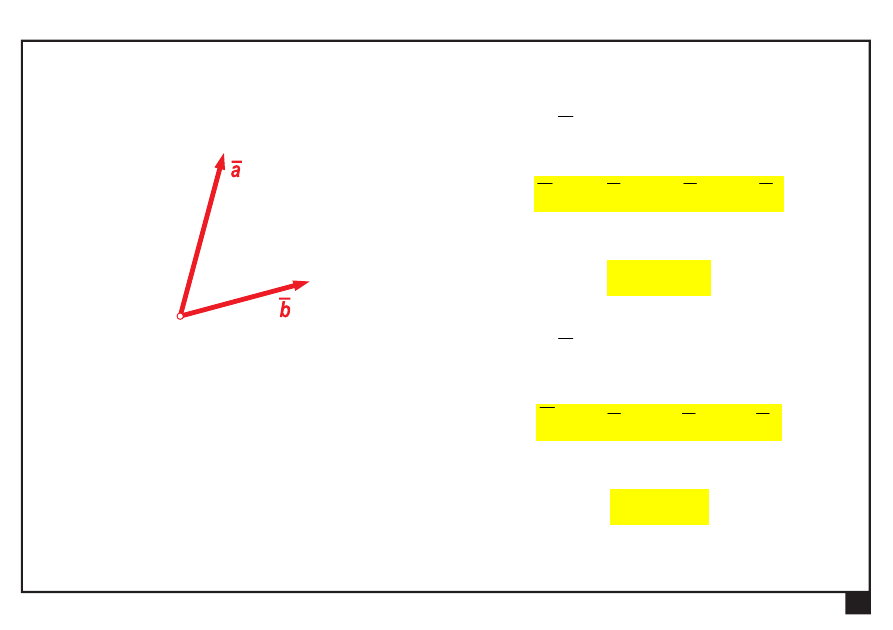
Suma dwóch wektorów
wektor
a
— zapis analityczny
z
z
y
y
x
x
a
a
a
a
e
e
e
— składowe
z
y
x
a
a
a
,
,
wektor
b
— zapis analityczny
z
z
y
y
x
x
b
b
b
b
e
e
e
— składowe
z
y
x
b
b
b
,
,

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
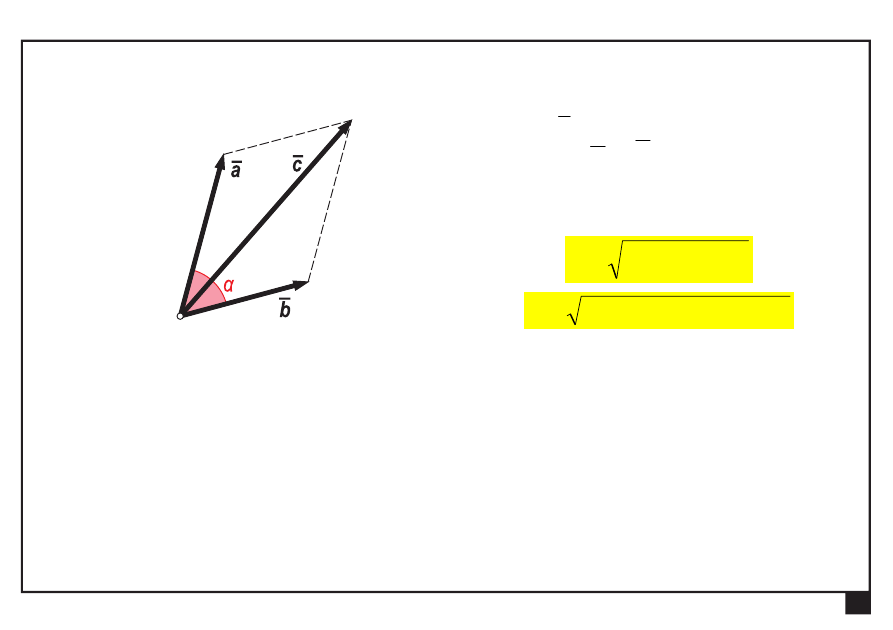
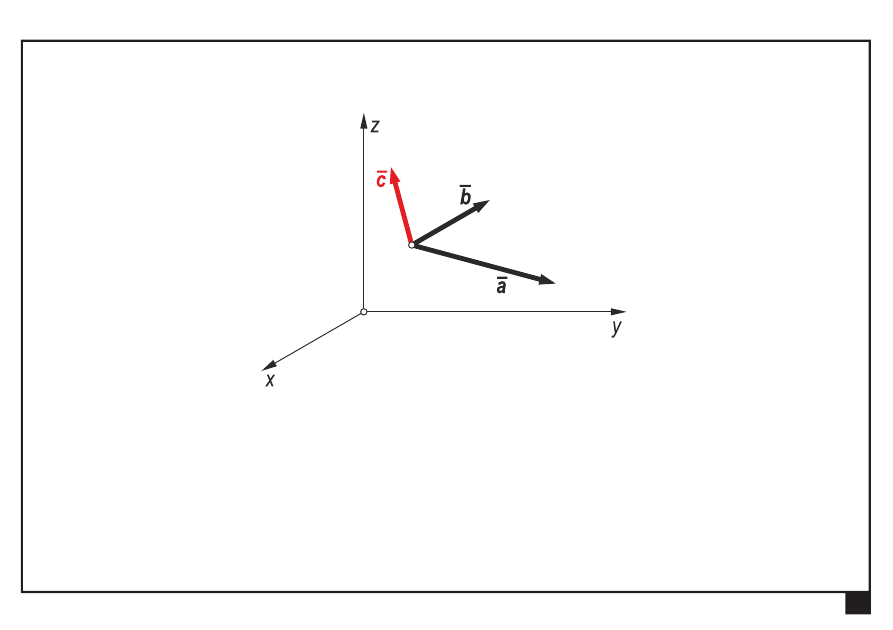
Suma dwóch wektorów
wektor
c
będący sumą
wektorów
a
i
b
b
a
c
— zapis analityczny
z
z
y
y
x
x
c
c
c
c
e
e
e
— składowe
x
x
x
b
a
c
y
y
y
b
a
c
z
z
z
b
a
c
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
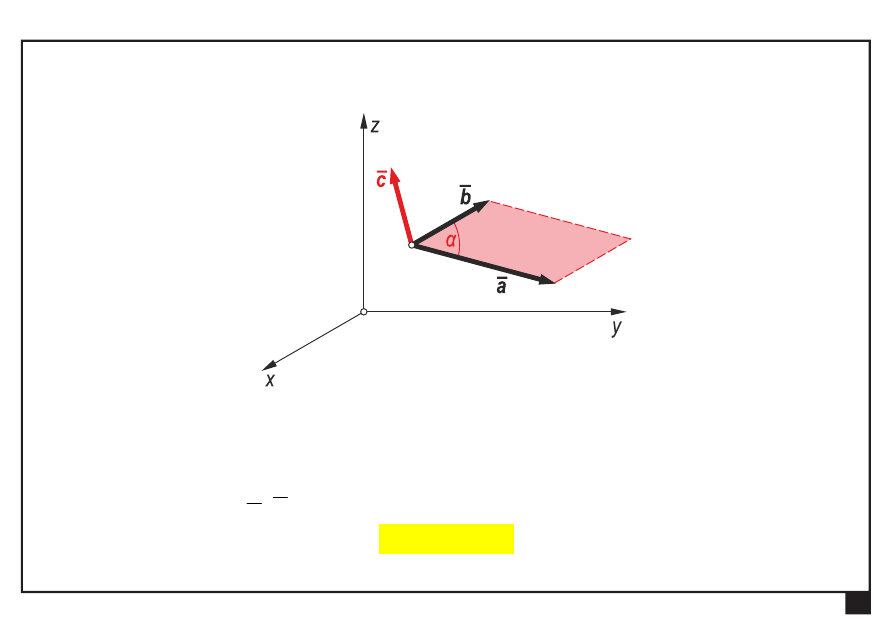
Suma dwóch wektorów
wektor
c
będący sumą
wektorów
a
i
b
— wartość (moduł)
2
2
2
z
y
x
c
c
c
c
cos
2
2
2
ab
b
a
c
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Różnica dwóch wektorów
wektor
a
— zapis analityczny
z
z
y
y
x
x
a
a
a
a
e
e
e
— składowe
z
y
x
a
a
a
,
,
wektor
b
— zapis analityczny
z
z
y
y
x
x
b
b
b
b
e
e
e
— składowe
z
y
x
b
b
b
,
,

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Różnica dwóch wektorów
wektor
b
— zapis analityczny
z
z
y
y
x
x
b
b
b
b
e
e
e
— składowe
z
y
x
b
b
b
,
,

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Różnica dwóch wektorów
wektor
c
będący różnicą
wektorów
a
i
b
)
(
b
a
b
a
c
— zapis analityczny
z
z
y
y
x
x
c
c
c
c
e
e
e
— składowe
x
x
x
b
a
c
y
y
y
b
a
c
z
z
z
b
a
c
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Mnożenie wektora przez skalar
wektor
b
będący wynikiem mnożenia wektora
a
przez skalar
s
a
s
b
— zapis analityczny
z
z
y
y
x
x
b
b
b
b
e
e
e
— składowe
x
x
a
s
b
y
y
a
s
b
z
z
a
s
b
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Iloczyn skalarny dwóch wektorów
wynik iloczynu skalarnego
skalar (liczba)
z
z
y
y
x
x
b
a
b
a
b
a
b
a
s
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Iloczyn skalarny dwóch wektorów
wynik iloczynu skalarnego
skalar (liczba)
z
z
y
y
x
x
b
a
b
a
b
a
b
a
s
cos
b
a
b
a
s
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Iloczyn skalarny dwóch wektorów
wynik iloczynu skalarnego
skalar (liczba)
z
z
y
y
x
x
b
a
b
a
b
a
b
a
s
cos
b
a
b
a
s
cos
b
— rzut wektora
b
na kierunek wektora
a
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
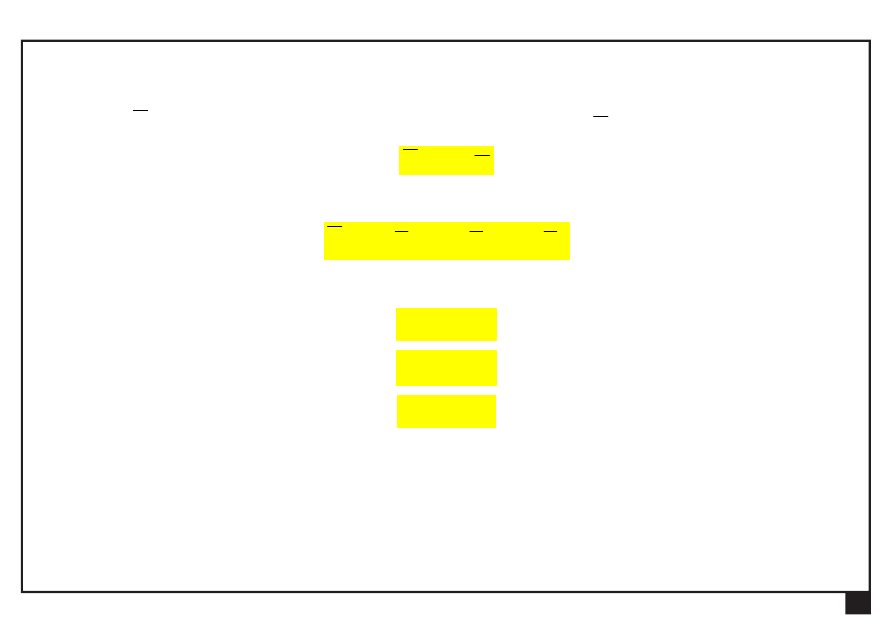
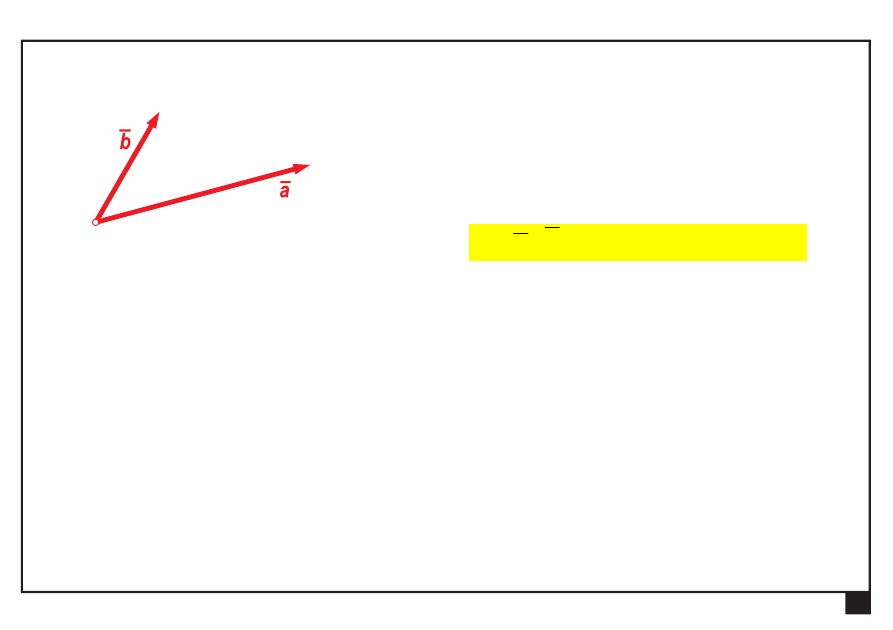
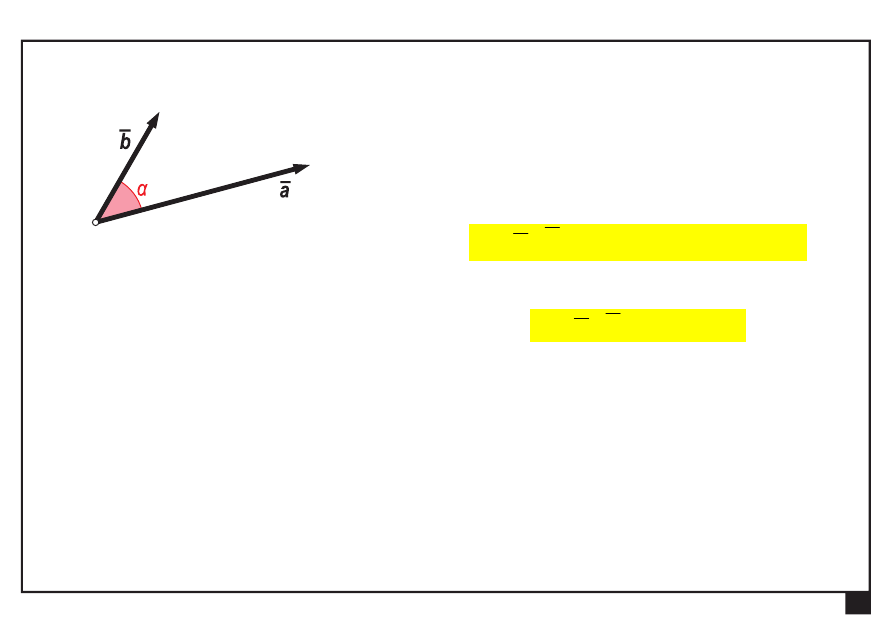
Iloczyn wektorowy dwóch wektorów
wynik iloczynu wektorowego
wektor
zapis wyznacznikowy
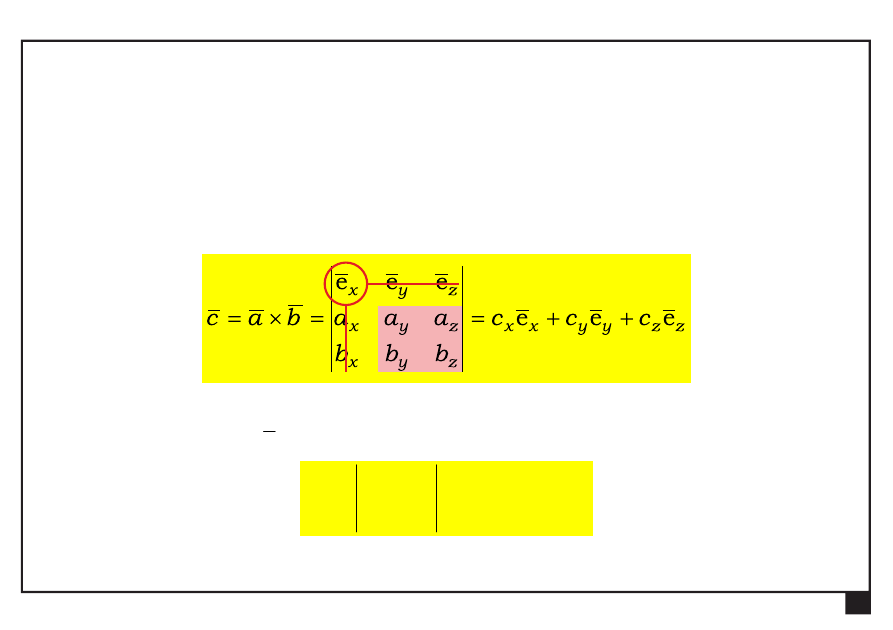
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
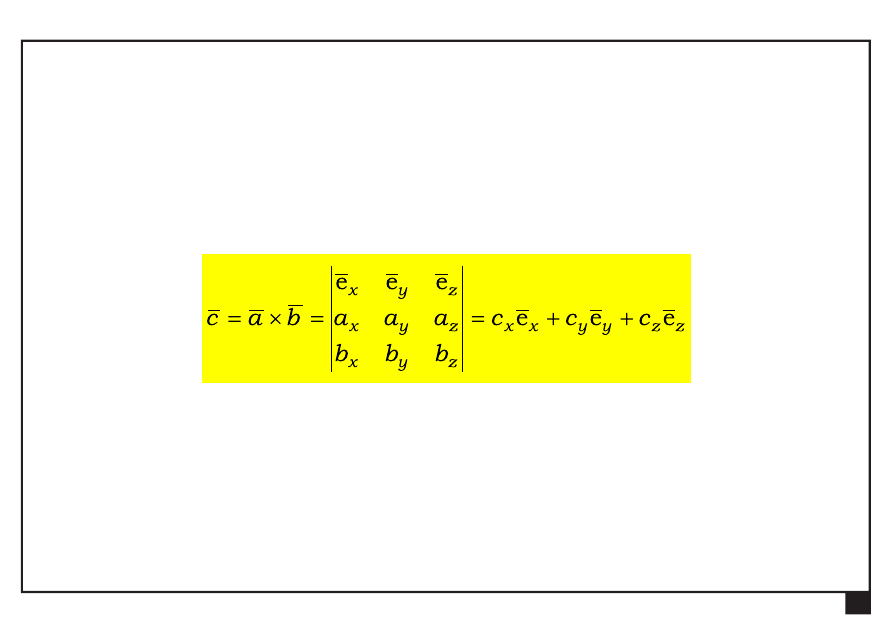
Iloczyn wektorowy dwóch wektorów
wynik iloczynu wektorowego
wektor
zapis wyznacznikowy
składowe wektora
c
*
)
y
z
z
y
z
y
z
y
x
b
a
b
a
b
b
a
a
c
*
)
rozwinięcie Laplace’a według elementów pierwszego wiersza
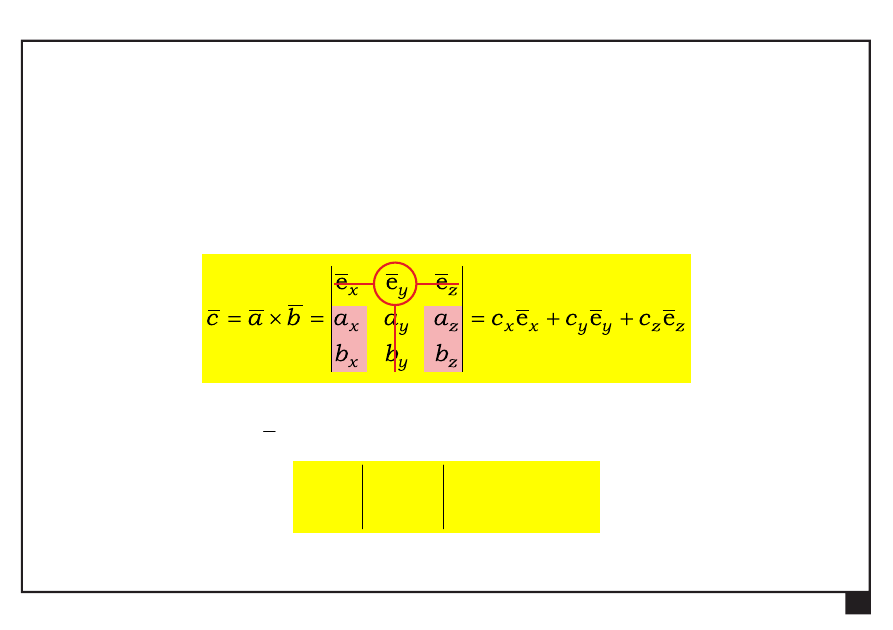
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Iloczyn wektorowy dwóch wektorów
wynik iloczynu wektorowego
wektor
zapis wyznacznikowy
składowe wektora
c
z
x
x
z
z
x
z
x
y
b
a
b
a
b
b
a
a
c

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Iloczyn wektorowy dwóch wektorów
wynik iloczynu wektorowego
wektor
zapis wyznacznikowy
składowe wektora
c
x
y
y
x
y
x
y
x
z
b
a
b
a
b
b
a
a
c
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
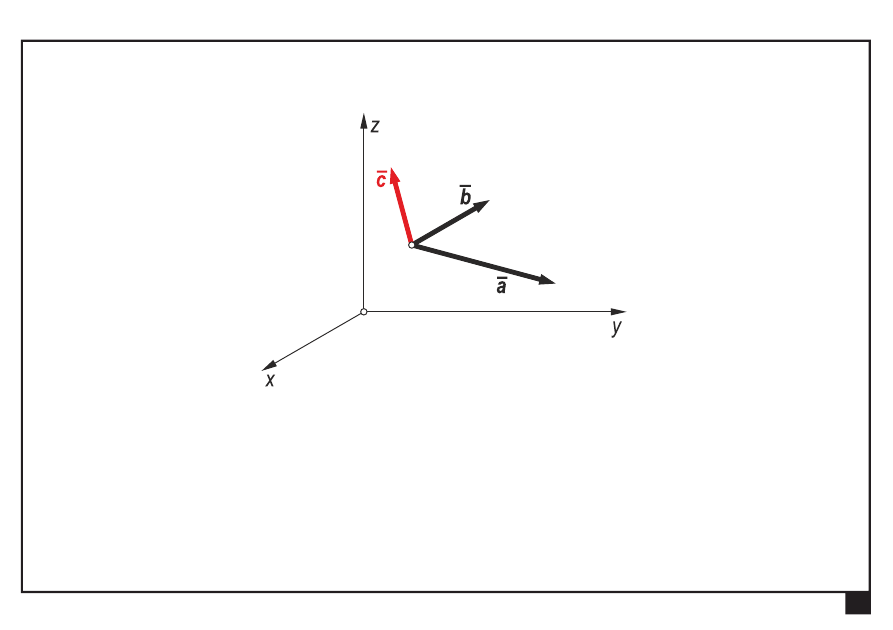
Iloczyn wektorowy dwóch wektorów
wynik iloczynu wektorowego —
wektor
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Iloczyn wektorowy dwóch wektorów
wynik iloczynu wektorowego —
wektor
— prostopadły do płaszczyzny utworzonej przez wektory
b
a,
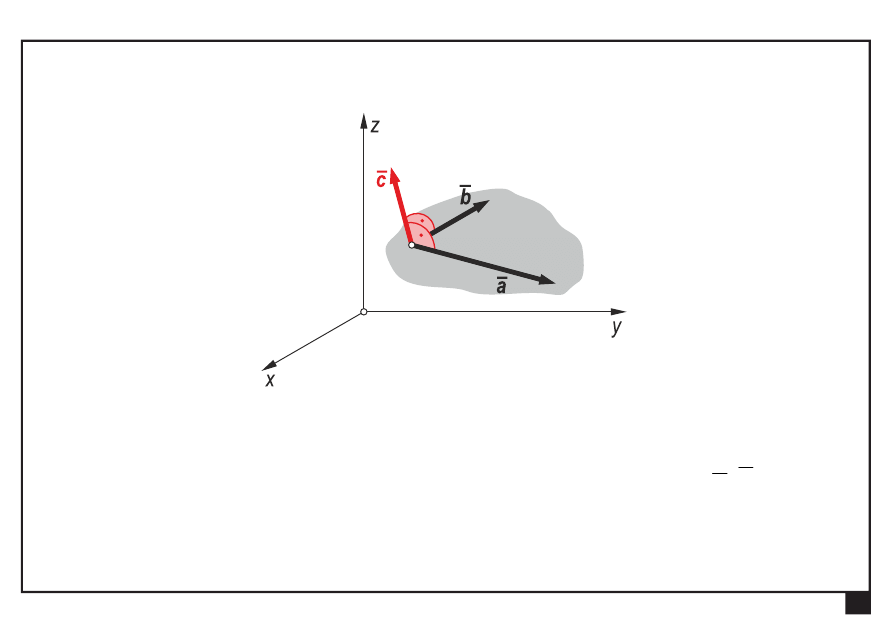
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
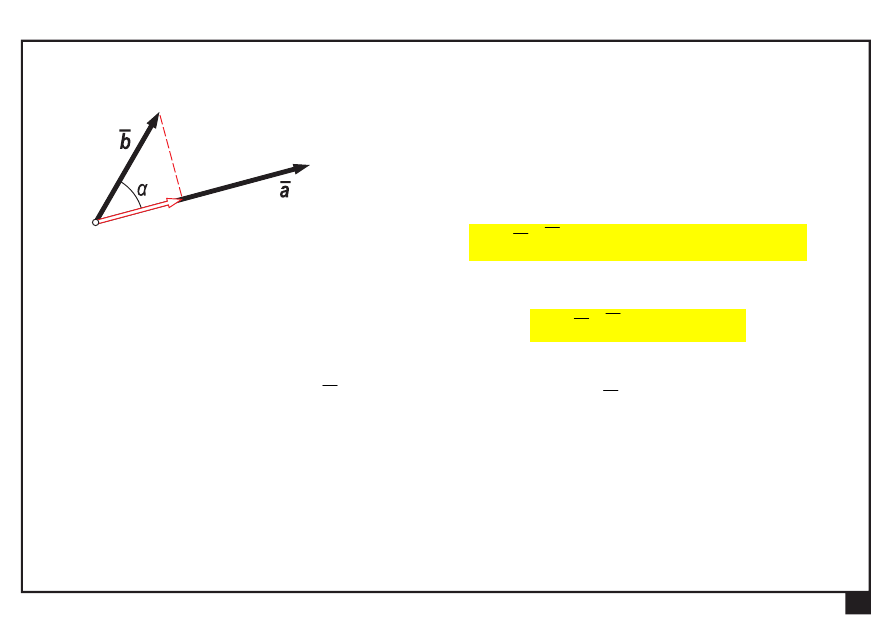
Iloczyn wektorowy dwóch wektorów
wynik iloczynu wektorowego —
wektor
— o zwrocie zgodnym z regułą prawej dłoni
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Iloczyn wektorowy dwóch wektorów
wynik iloczynu wektorowego —
wektor
— o wartości równej polu równoległoboku rozpiętego
na wektorach
b
a,
sin
b
a
c
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Iloczyn wektorowy dwóch wektorów
mnożenie wektorowe nie jest przemienne
b
a
a
b
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Wektory na płaszczyźnie
y
y
x
x
a
a
a
e
e
y
y
x
x
b
b
b
e
e
90
0
cos
z
z
— dodawanie
y
y
x
x
c
c
b
a
c
e
e
x
x
x
b
a
c
,
y
y
y
b
a
c
— odejmowanie
y
y
x
x
c
c
b
a
c
e
e
x
x
x
b
a
c
,
y
y
y
b
a
c
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Wektory na płaszczyźnie
y
y
x
x
a
a
a
e
e
y
y
x
x
b
b
b
e
e
90
0
cos
z
z
— iloczyn skalarny
y
y
x
x
b
b
a
s
b
e
e
x
x
a
s
b
,
y
y
a
s
b
— iloczyn wektorowy
z
z
y
x
y
x
z
y
x
c
b
b
a
a
b
a
c
e
0
0
e
e
e
x
y
y
x
z
b
a
b
a
c

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Punkt materialny
— obiekt o zerowych wymiarach i skończonej
masie. Punkt materialny jest pojęciem abstrakcyjnym.
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Punkt materialny
— obiekt o zerowych wymiarach i skończonej
masie. Punkt materialny jest pojęciem abstrakcyjnym.
Ciało sztywne
— zbiór punktów materialnych
o stałych odległościach między nimi.
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Punkt materialny
— obiekt o zerowych wymiarach i skończonej
masie. Punkt materialny jest pojęciem abstrakcyjnym.
Ciało sztywne
— zbiór punktów materialnych
o stałych odległościach między nimi.
Bryła
— ciało sztywne (nieodkształcalne) 3D.
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Punkt materialny
— obiekt o zerowych wymiarach i skończonej
masie. Punkt materialny jest pojęciem abstrakcyjnym.
Ciało sztywne
— zbiór punktów materialnych
o stałych odległościach między nimi.
Bryła
— ciało sztywne (nieodkształcalne) 3D.
Tarcza
— bryła, której grubość
h jest o rząd mniejsza od dwóch
pozostałych wymiarów gabarytowych.
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
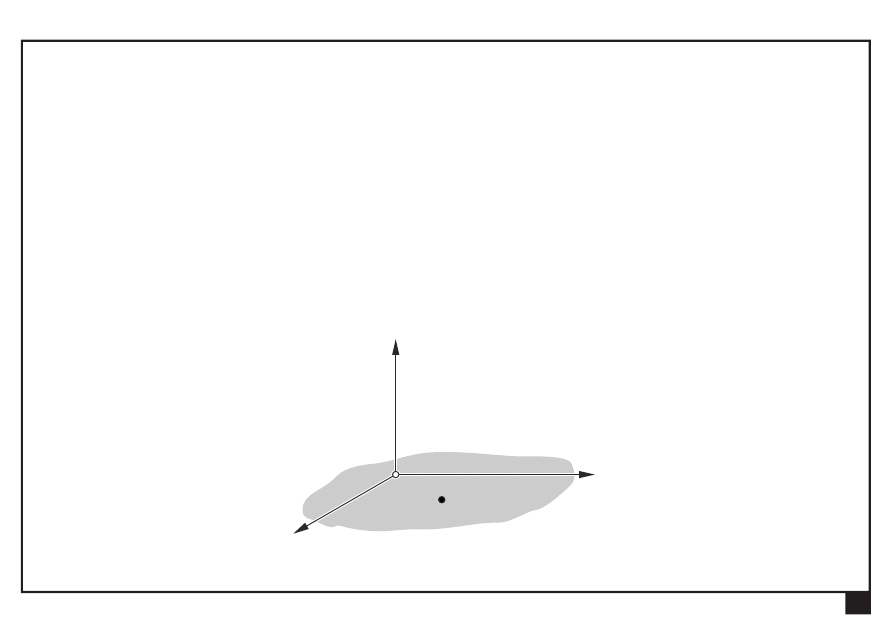
Pojęcia podstawowe
Liczba stopni swobody
punktu materialnego lub ciała sztywnego
nazywamy liczbę
n niezależnych przemieszczeń opisujących ruch
punktu lub ciała:
— punkt na płaszczyźnie:
x
z
y
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Liczba stopni swobody
punktu materialnego lub ciała sztywnego
nazywamy liczbę
n niezależnych przemieszczeń opisujących ruch
punktu lub ciała:
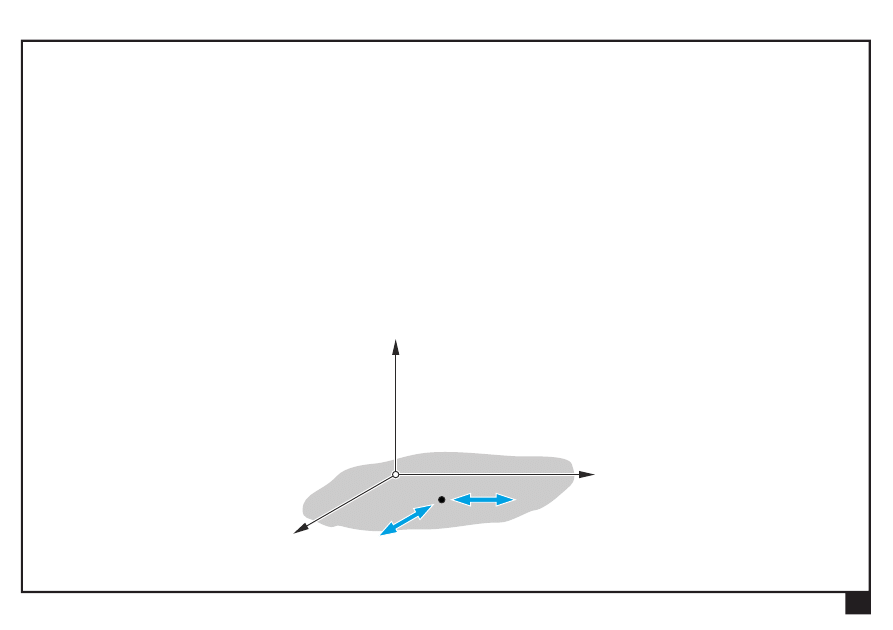
— punkt na płaszczyźnie:
n = 2
x
z
y
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Liczba stopni swobody
punktu materialnego lub ciała sztywnego
nazywamy liczbę
n niezależnych przemieszczeń opisujących ruch
punktu lub ciała:
— punkt na płaszczyźnie:
n = 2
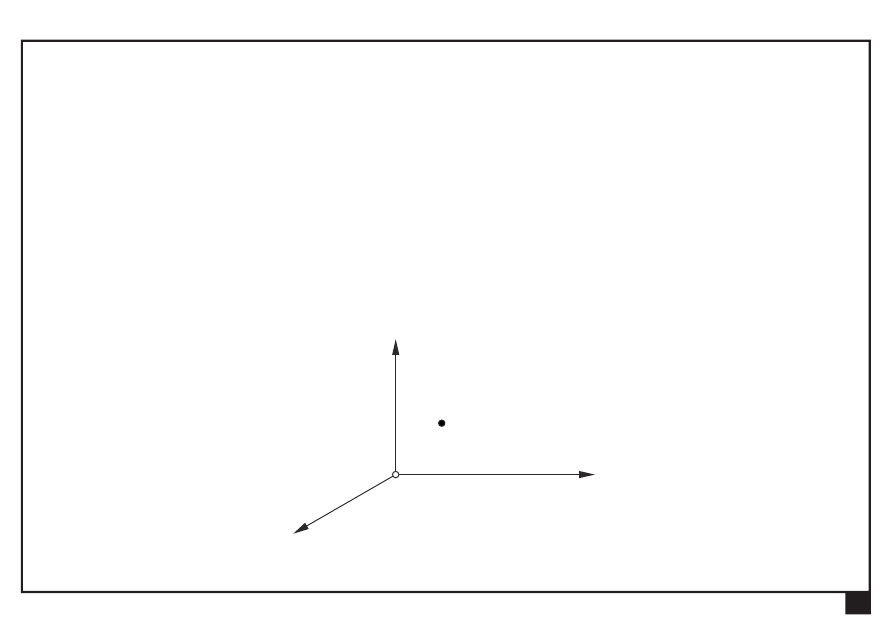
— punkt w przestrzeni:
x
z
y
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Liczba stopni swobody
punktu materialnego lub ciała sztywnego
nazywamy liczbę
n niezależnych przemieszczeń opisujących ruch
punktu lub ciała:
— punkt na płaszczyźnie:
n = 2
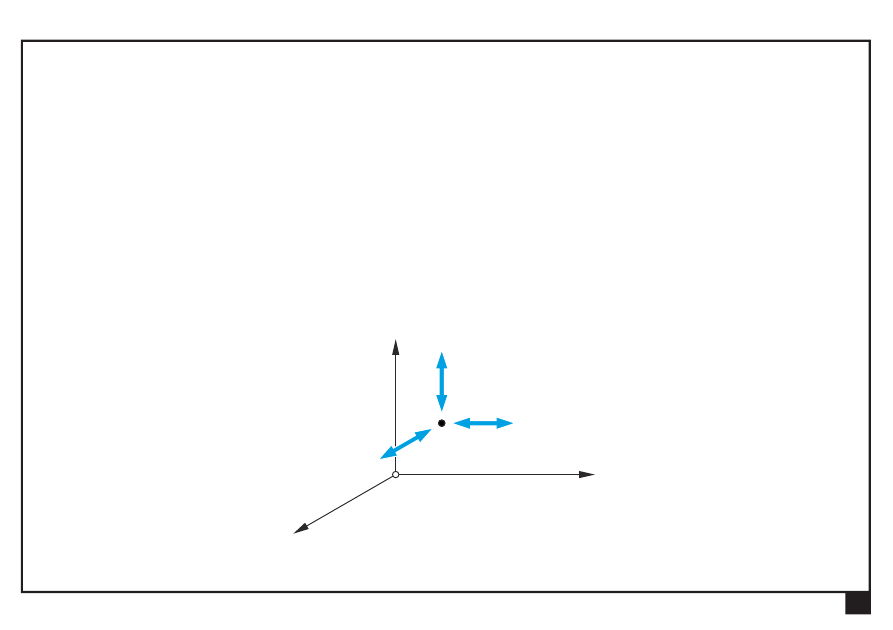
— punkt w przestrzeni:
n = 3
x
z
y

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Liczba stopni swobody
punktu materialnego lub ciała sztywnego
nazywamy liczbę
n niezależnych przemieszczeń opisujących ruch
punktu lub ciała:
— punkt na płaszczyźnie:
n = 2
— punkt w przestrzeni:
n = 3
— tarcza lub pręt na płaszczyźnie:
x
z
y

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Liczba stopni swobody
punktu materialnego lub ciała sztywnego
nazywamy liczbę
n niezależnych przemieszczeń opisujących ruch
punktu lub ciała:
— punkt na płaszczyźnie:
n = 2
— punkt w przestrzeni:
n = 3
— tarcza lub pręt na płaszczyźnie:
n = 3
x
z
y

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Liczba stopni swobody
punktu materialnego lub ciała sztywnego
nazywamy liczbę
n niezależnych przemieszczeń opisujących ruch
punktu lub ciała:
— punkt na płaszczyźnie:
n = 2
— punkt w przestrzeni:
n = 3
— tarcza lub pręt na płaszczyźnie:
n = 3
— bryła w przestrzeni:
x
z
y

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Liczba stopni swobody
punktu materialnego lub ciała sztywnego
nazywamy liczbę
n niezależnych przemieszczeń opisujących ruch
punktu lub ciała:
— punkt na płaszczyźnie:
n = 2
— punkt w przestrzeni:
n = 3
— tarcza lub pręt na płaszczyźnie:
n = 3
— bryła w przestrzeni:
n = 6
x
z
y
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Więzy
— ograniczenia nałożone na ruch punktu
lub ciała sztywnego:
— więzy idealne (bez tarcia) lub nieidealne (z tarciem)
— więzy nieodkształcalne lub odkształcalne
—
więzy dwustronne lub jednostronne
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
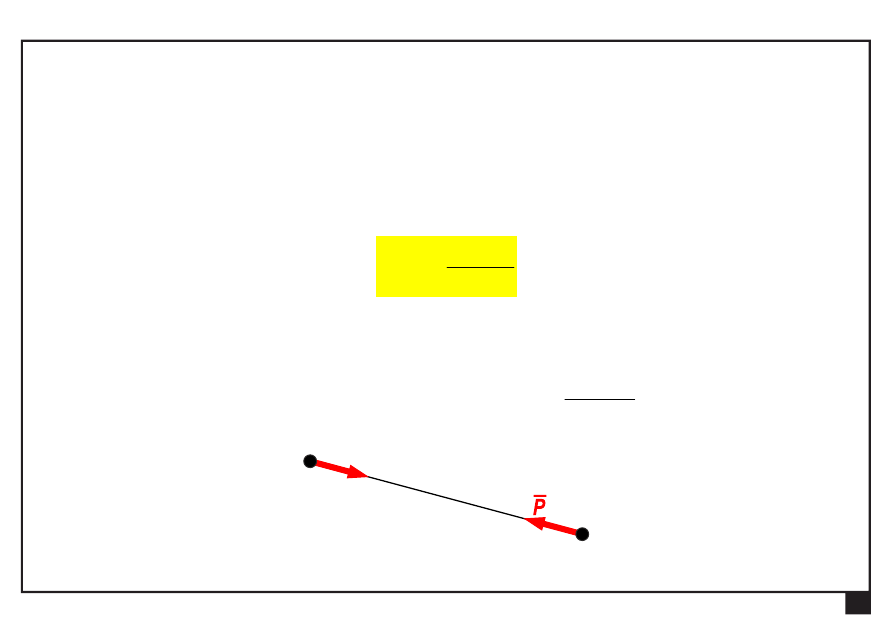
Pojęcia podstawowe
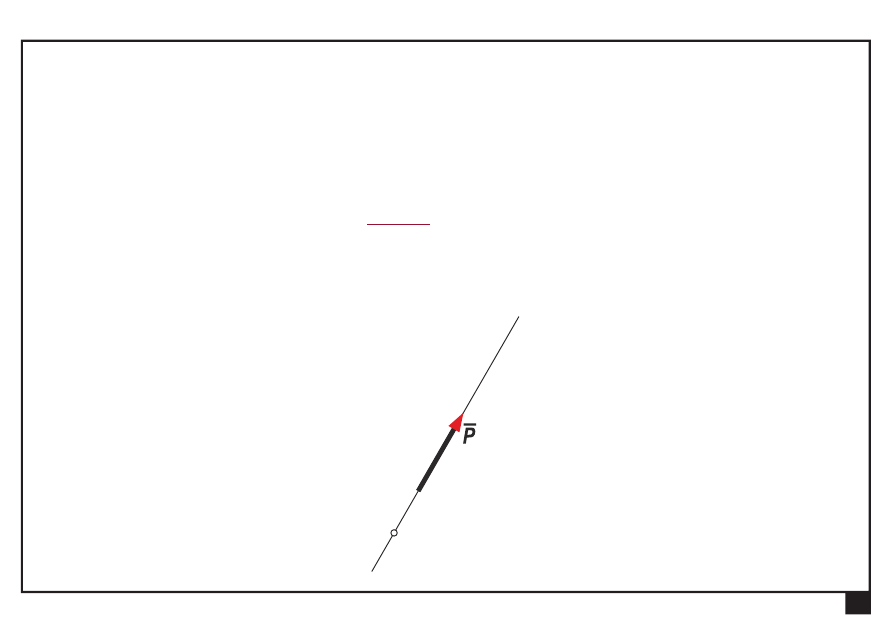
Siła
— pojęcie abstrakcyjne

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Siła
— pojęcie abstrakcyjne
— poznawalna po skutkach swego działania
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Siła
— pojęcie abstrakcyjne
— poznawalna po skutkach swego działania
— wektor liniowy (wartość, zwrot i prosta działania)
u
A
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Siła
— pojęcie abstrakcyjne
— poznawalna po skutkach swego działania
— wektor liniowy (
wartość
, zwrot i prosta działania)
u
P
A
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Siła
— pojęcie abstrakcyjne
— poznawalna po skutkach swego działania
— wektor liniowy (wartość,
zwrot
i prosta działania)
u
A

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Siła
— pojęcie abstrakcyjne
— poznawalna po skutkach swego działania
— wektor liniowy (wartość, zwrot i
prosta działania
)
u
A
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
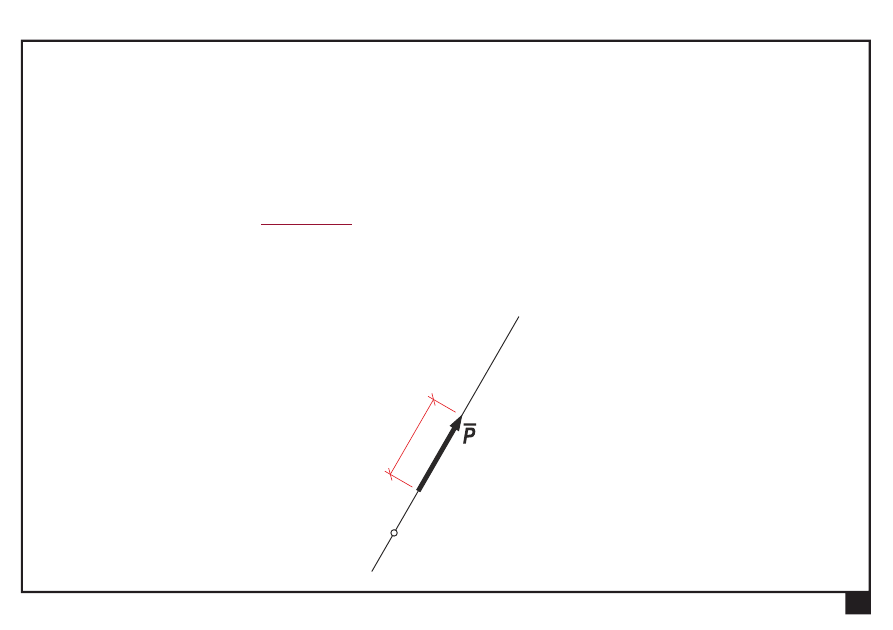
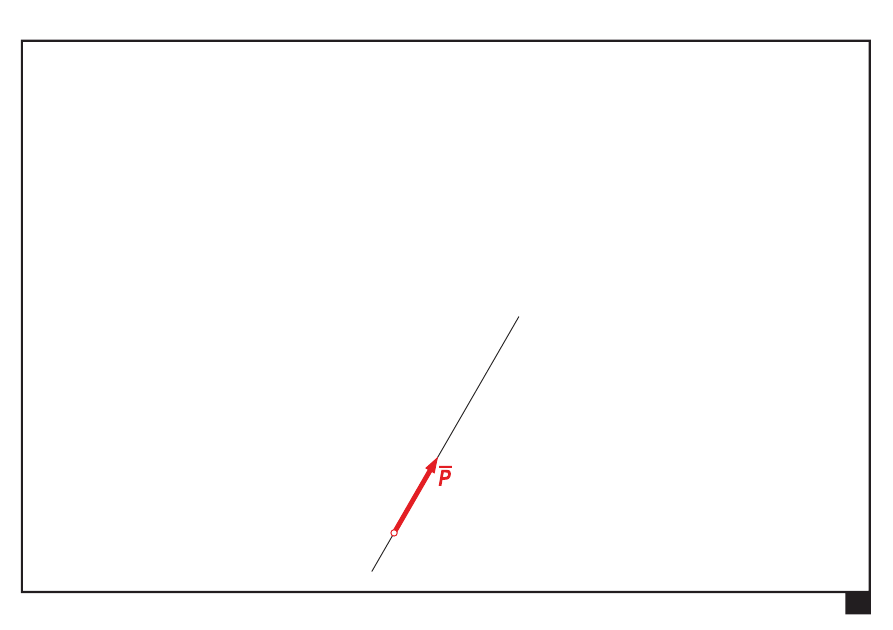
Pojęcia podstawowe
Siła
— pojęcie abstrakcyjne
— poznawalna po skutkach swego działania
— wektor liniowy (wartość, zwrot i prosta działania)
Siłę można przesunąć do punktu lokacyjnego prostej działania siły.
u
A
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
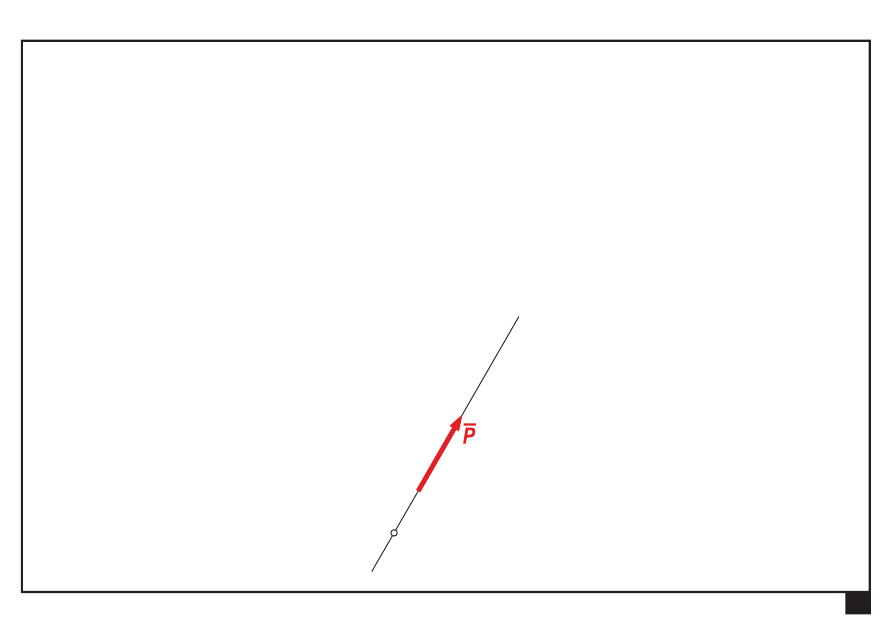
Siła
— zapis analityczny siły na płaszczyźnie:
y
y
x
x
P
P
P
e
e
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Siła
— zapis analityczny siły na płaszczyźnie:
y
y
x
x
P
P
P
e
e
y
x
P
P ,
— składowe siły
y
x
e
,
e
— wersory osi
x i y
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Siła
— zapis analityczny siły na płaszczyźnie:
y
y
x
x
P
P
P
e
e
y
x
P
P ,
— składowe siły
y
x
e
,
e
— wersory osi
x i y
— wartość siły:
2
2
y
x
P
P
P
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Siła
— zapis analityczny siły w przestrzeni:
z
z
y
y
x
x
P
P
P
P
e
e
e
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Siła
— zapis analityczny siły w przestrzeni:
z
z
y
y
x
x
P
P
P
P
e
e
e
z
y
x
P
P
P
,
,
— składowe siły
z
y
x
e
,
e
,
e
— wersory osi
x, y i z

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Siła
— zapis analityczny siły w przestrzeni:
z
z
y
y
x
x
P
P
P
P
e
e
e
z
y
x
P
P
P
,
,
— składowe siły
z
y
x
e
,
e
,
e
— wersory osi
x, y i z
— wartość siły:
2
2
2
z
y
x
P
P
P
P
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Siła
— jednostki składowych siły
z
y
x
P
P
P
,
,
oraz modułu P :
2
s
m
kg
1
N
1
N
10
N
000
1
kN
1
3
N
10
N
000
000
1
MN
1
6
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
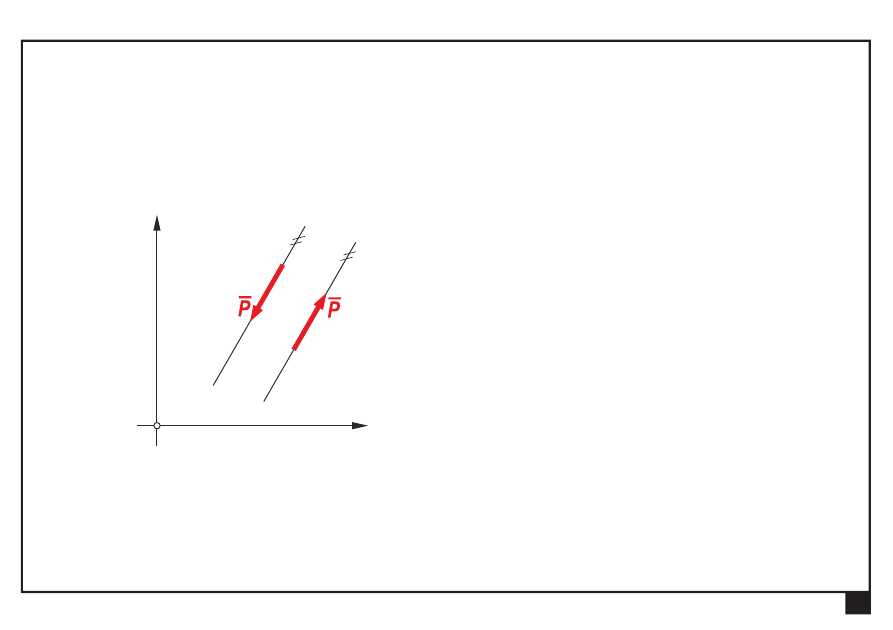
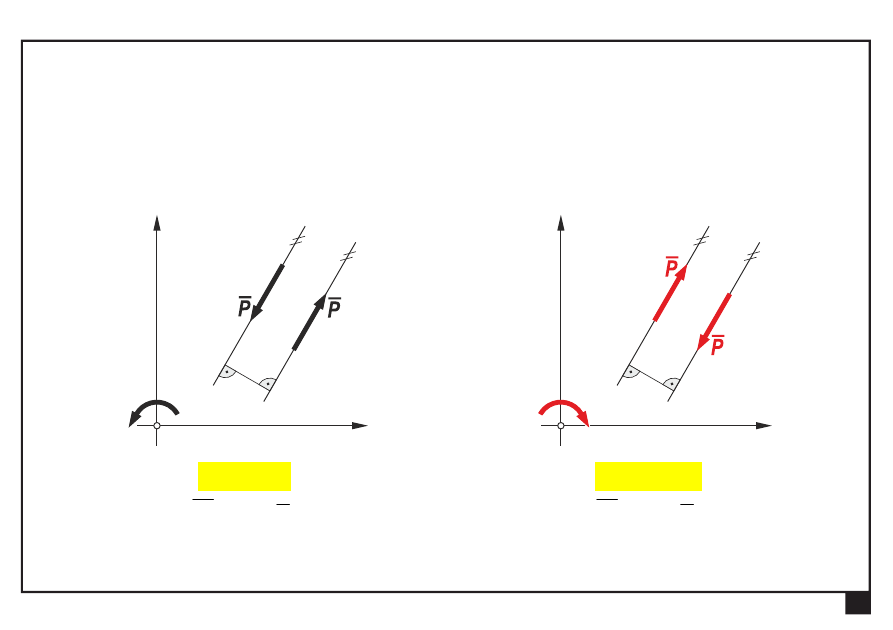
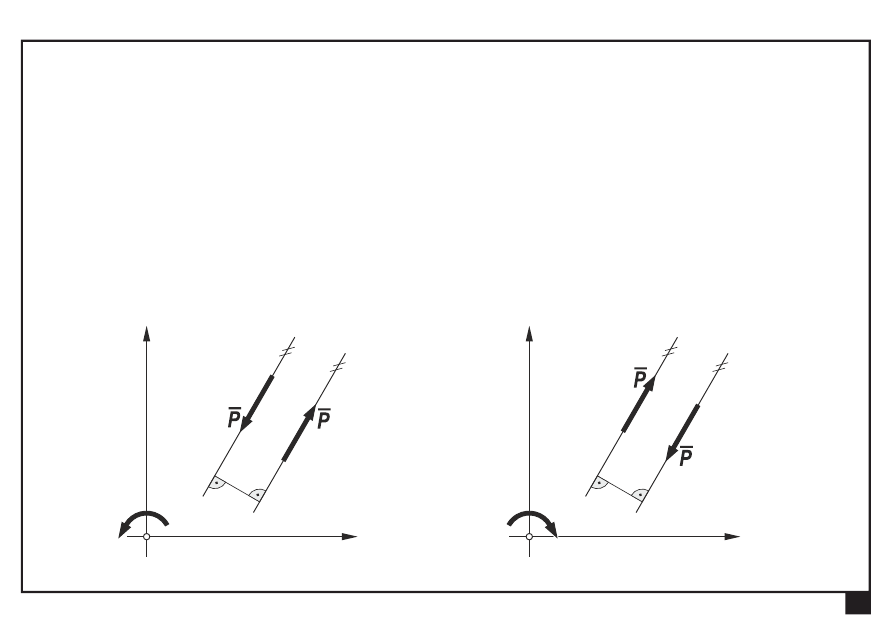
Para sił
— dwie siły leżące na prostych równoległych, mające
tę samą wartość i przeciwne zwroty
y
x
( )
z
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
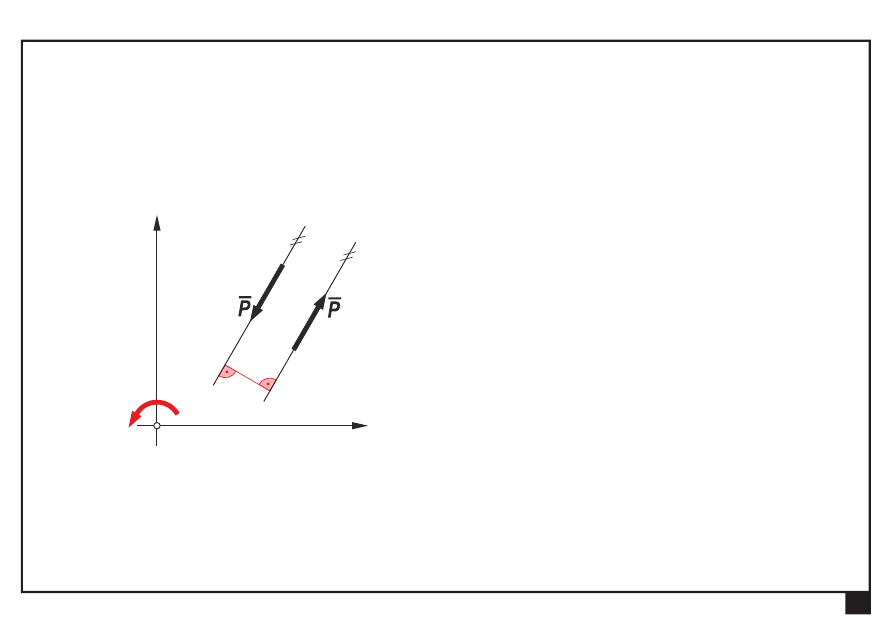
Pojęcia podstawowe
Para sił
— dwie siły leżące na prostych równoległych, mające
tę samą wartość i przeciwne zwroty
a
y
x
( )
z
M
— parę sił można zastąpić momentem
M, działającym
w płaszczyźnie pary sił
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
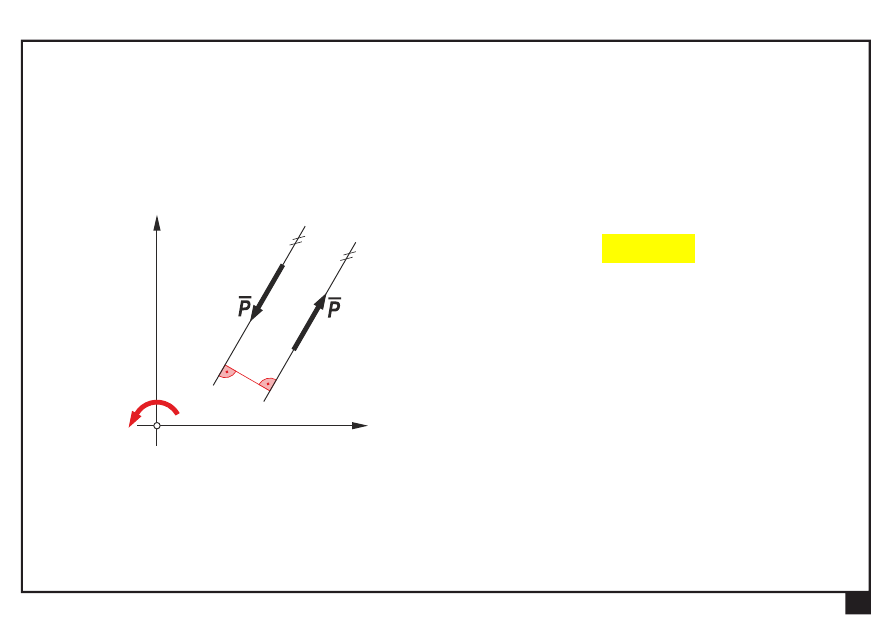
Pojęcia podstawowe
Para sił
— dwie siły leżące na prostych równoległych, mające
tę samą wartość i przeciwne zwroty
a
y
x
( )
z
M
a
P
M
— parę sił można zastąpić momentem
M, działającym
w płaszczyźnie pary sił
a — ramię pary sił
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Para sił
— dwie siły leżące na prostych równoległych, mające
tę samą wartość i przeciwne zwroty
a
y
x
( )
z
M
a
P
M
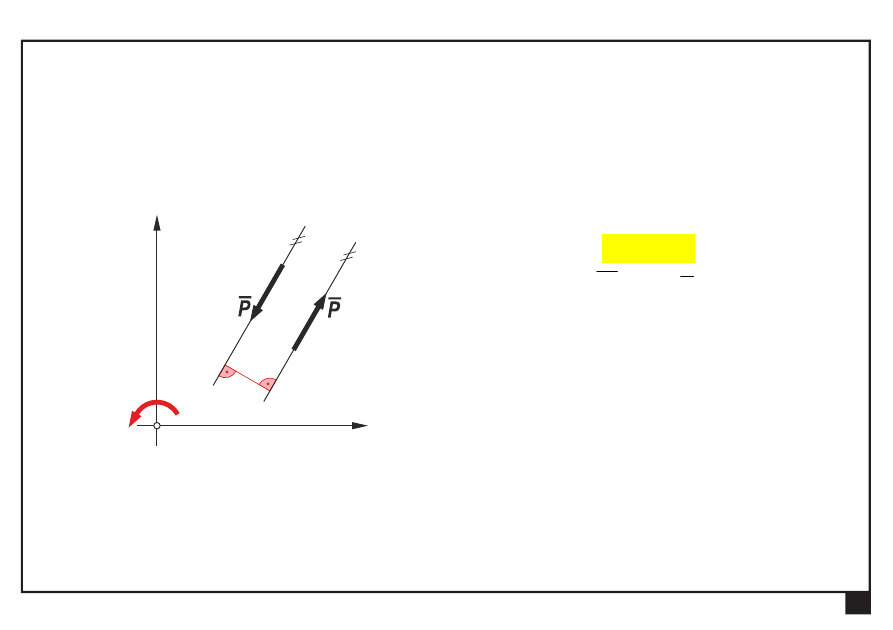
z
z
M
M
e
a
P
M
z
— parę sił można zastąpić momentem, działającym
w płaszczyźnie pary sił
— zwrot momentu
M wynika z reguły prawej dłoni
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Para sił
— dwie siły leżące na prostych równoległych, mające
tę samą wartość i przeciwne zwroty
a
y
x
( )
z
M
a
P
M
z
z
M
M
e
a
P
M
z
a
y
x
( )
z
M
a
P
M
z
z
M
M
e
a
P
M
z
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
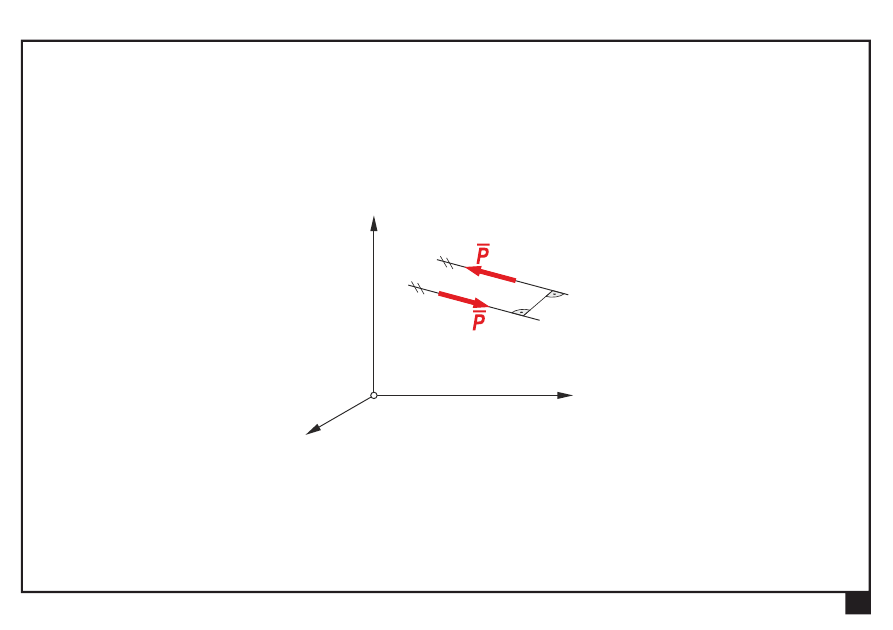
Pojęcia podstawowe
Para sił
— dwie siły leżące na prostych równoległych, mające
tę samą wartość i przeciwne zwroty
z
y
x
a
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Para sił
— dwie siły leżące na prostych równoległych, mające
tę samą wartość i przeciwne zwroty
z
y
x
a

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Para sił
— dwie siły leżące na prostych równoległych, mające
tę samą wartość i przeciwne zwroty
z
y
x
a
a
P
M
z
z
y
y
x
x
M
M
M
M
e
e
e

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Moment pary sił
— wektor swobodny, prostopadły do płaszczyzny działania
pary sił, o zwrocie zgodnym z regułą prawej dłoni
z
y
x
a
o wartości
a
P
M

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Pojęcia podstawowe
Moment pary sił
— jednostki składowych momentu
z
y
x
M
M
M
,
,
oraz modułu M :
m
N
1
m
N
10
m
N
000
1
m
kN
1
3
m
N
10
m
N
000
000
1
m
MN
1
6
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Definicje
Obciążenie dowolne
— układ sił i/lub momentów działających
na ciało sztywne.

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Definicje
Obciążenie dowolne
— układ sił i/lub momentów działających
na ciało sztywne.
Dwa układy obciążeń są sobie równoważne, jeśli zastąpienie jednego
układu obciążeń układem drugim wywołuje takie same skutki.
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Definicje
Obciążenie dowolne
— układ sił i/lub momentów działających
na ciało sztywne.
Dwa układy obciążeń są sobie równoważne, jeśli zastąpienie jednego
układu obciążeń układem drugim wywołuje takie same skutki.
Redukcja układu obciążeń
— zastąpienie tego układu
najprostszym układem równoważnym.

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Definicje
Obciążenie dowolne
— układ sił i/lub momentów działających
na ciało sztywne.
Dwa układy obciążeń są sobie równoważne, jeśli zastąpienie jednego
układu obciążeń układem drugim wywołuje takie same skutki.
Redukcja układu obciążeń
— zastąpienie tego układu
najprostszym układem równoważnym.
Układ obciążeń działających na ciało sztywne jest w równowadze
statycznej, jeśli redukuje się do zera.
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Definicje
Obciążenie dowolne
— układ sił i/lub momentów działających
na ciało sztywne.
Dwa układy obciążeń są sobie równoważne, jeśli zastąpienie jednego
układu obciążeń układem drugim wywołuje takie same skutki.
Redukcja układu obciążeń
— zastąpienie tego układu
najprostszym układem równoważnym.
Układ obciążeń działających na ciało sztywne jest w równowadze
statycznej, jeśli redukuje się do zera.
Statyka
— dział mechaniki ogólnej zajmujący się badaniem
równowagi statycznej układów obciążeń i przekształcaniem
tych układów.
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Prawa Newtona — zasady dynamiki Newtona
I prawo Newtona — I zasada dynamiki
(zasada bezwładności)
Jeśli układ sił działających na punkt materialny
jest w równowadze statycznej, to punkt ten jest nieruchomy
lub jest w ruchu prostoliniowym jednostajnym.

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Prawa Newtona — zasady dynamiki Newtona
II prawo Newtona — II zasada dynamiki
Pochodna pędu punktu materialnego jest równa
sile działającej na ten punkt.

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Prawa Newtona — zasady dynamiki Newtona
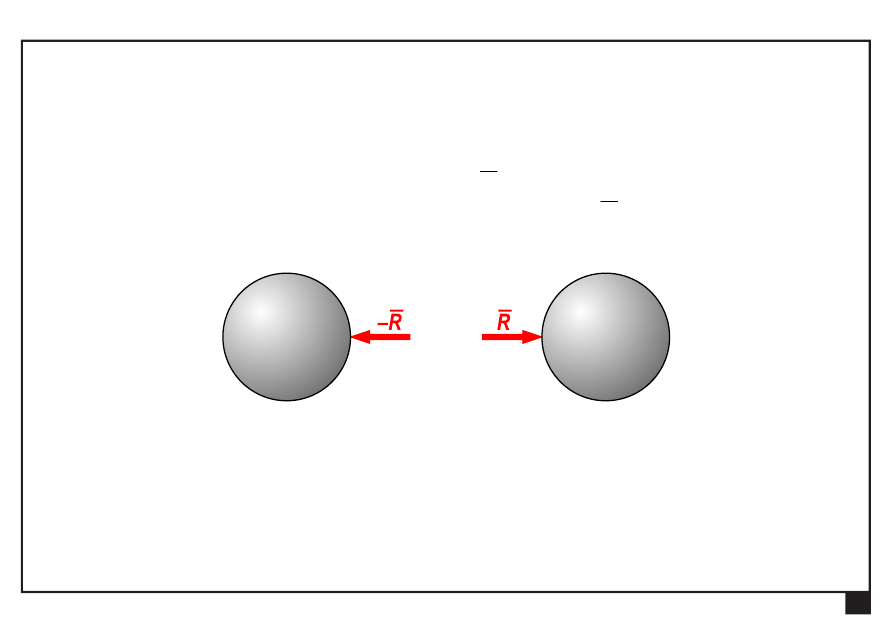
III prawo Newtona — III zasada dynamiki
(zasada akcji i reakcji)
Jeśli ciało A działa na ciało B siłą R ,
to ciało B działa na ciało A siłą kolinearną R
.
A
B
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Prawa Newtona — zasady dynamiki Newtona
III prawo Newtona — III zasada dynamiki
(zasada akcji i reakcji)
Jeśli ciało A działa na ciało B siłą R ,
to ciało B działa na ciało A siłą kolinearną R
.
A
B

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Prawa Newtona — zasady dynamiki Newtona
III prawo Newtona — III zasada dynamiki
(zasada akcji i reakcji)
Jeśli ciało A działa na ciało B siłą R ,
to ciało B działa na ciało A siłą kolinearną R
.
A
B
Siły R i R
mają jednakową wartość, wspólną prostą działania
i przeciwne zwroty.
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Prawa Newtona — zasady dynamiki Newtona
Prawo powszechnego ciążenia (prawo grawitacji)
Dwa punkty materialne przyciągają się
poprzez siłę grawitacji równą
2
2
1
r
m
m
k
P
m
1
,
m
2
— masy punktów materialnych,
r —
odległość punktów materialnych,
k —
stała grawitacji,
2
3
11
s
kg
m
10
67
,
6
k
.
m
1
m
2
r
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Prawa Newtona — zasady dynamiki Newtona
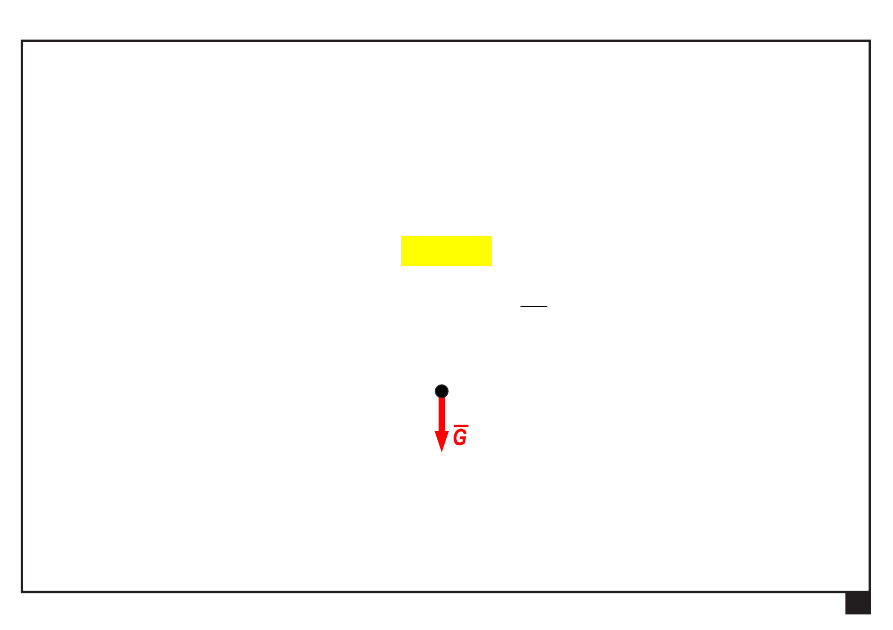
Prawo powszechnego ciążenia (prawo grawitacji)
W warunkach ziemskich prawo grawitacji objawia się
siłą ciężkości
G punktu materialnego
g
m
G
g — przyspieszenie ziemskie,
2
s
m
81
,
9
g
m
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
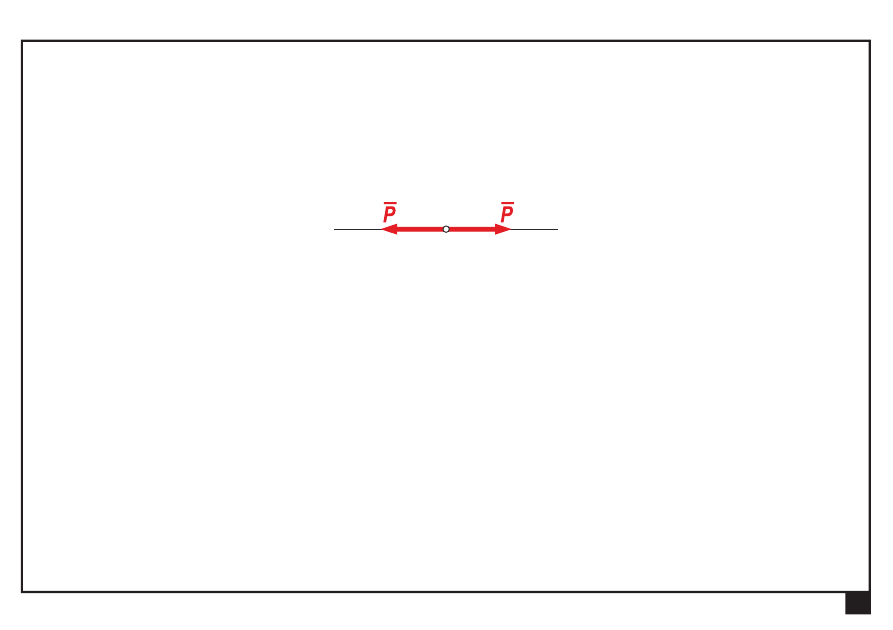
Aksjomaty statyki
Dwie siły kolinearne, o tej samej wartości i przeciwnych zwrotach
są w równowadze statycznej.
A
u
Układ taki nazywamy
układem zerowym sił
.
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
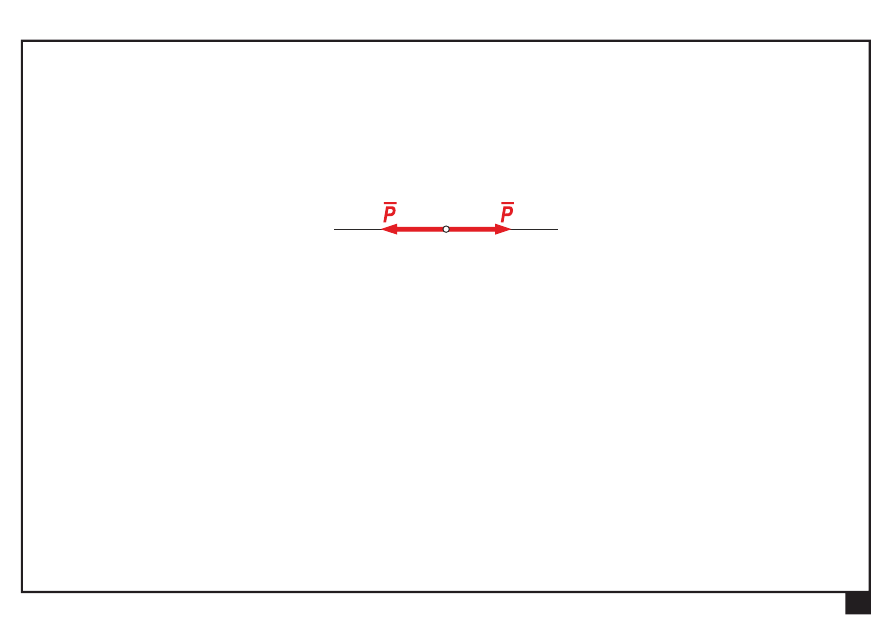
Aksjomaty statyki
Dwie siły kolinearne, o tej samej wartości i przeciwnych zwrotach
są w równowadze statycznej.
A
u
Układ taki nazywamy
układem zerowym sił
.
Jeśli do układu obciążeń działających na ciało sztywne
dodamy układ zerowy sił, to skutek działania układu obciążeń
nie zmieni się
.

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
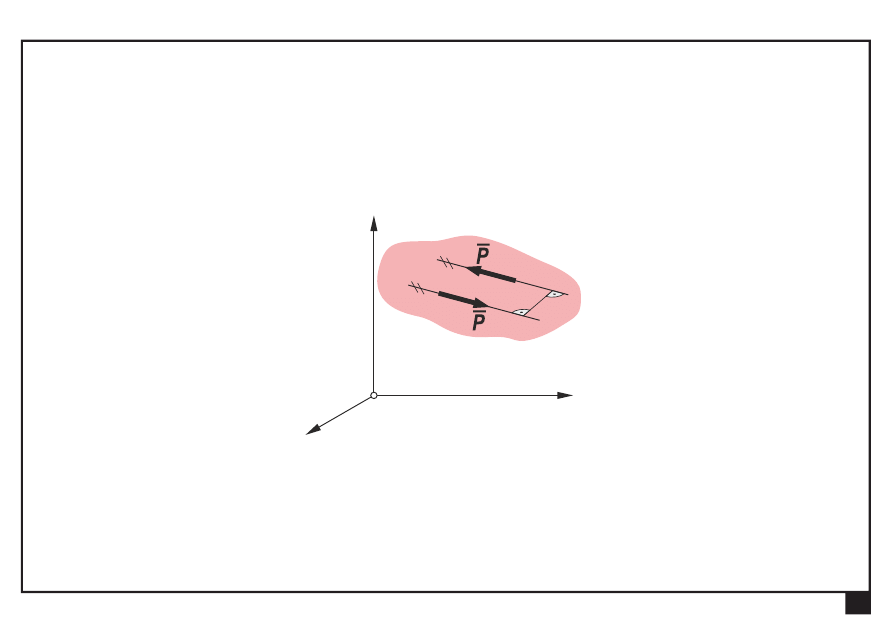
Aksjomaty statyki
Parę sił działającą w płaszczyźnie
xy można zastąpić
momentem
M, który jest wektorem swobodnym,
o zwrocie zgodnym z regułą prawej dłoni,
prostopadłym do płaszczyzny
xy.
Moment ten nazywamy
momentem pary sił
.
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Aksjomaty statyki
Parę sił działającą w płaszczyźnie
xy można zastąpić
momentem
M, który jest wektorem swobodnym,
o zwrocie zgodnym z regułą prawej dłoni,
prostopadłym do płaszczyzny
xy.
Moment ten nazywamy
momentem pary sił
.
a
y
x
( )
z
M
a
y
x
( )
z
M
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Aksjomaty statyki
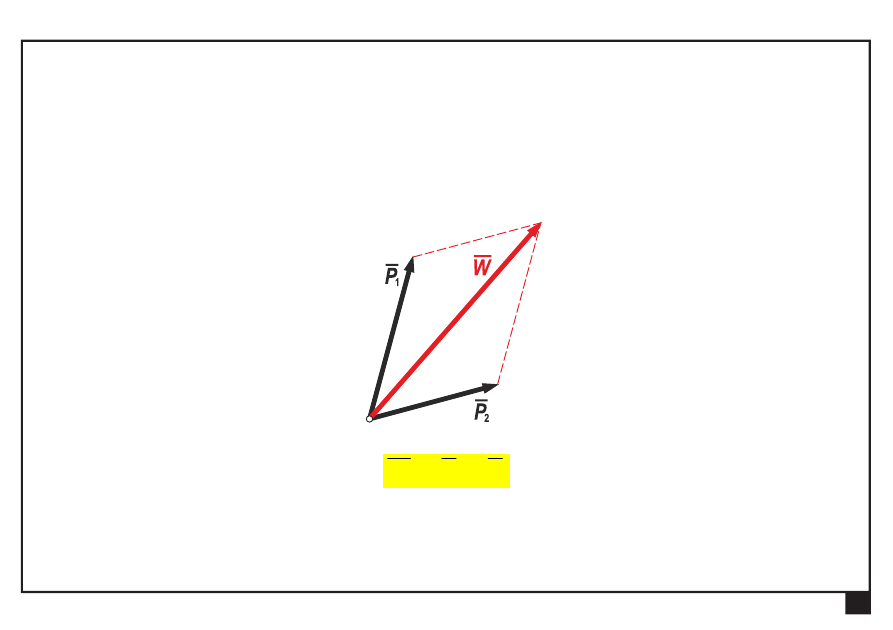
Dwie siły zbieżne
P
1
i
P
2
działające na punkt A można zastąpić
ich wypadkową
W, będącą przekątną równoległoboku
rozpiętego na tych siłach.
A
2
1
P
P
W

Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Aksjomaty statyki
Układ momentów par sił działających w płaszczyźnie
xy
można zastąpić jednym momentem o wartości
m
j
jz
m
j
jz
z
M
M
M
1
1
)
(
y
x
( )
z
M
1
M
2
M
j
M
m
y
x
( )
z
M
z
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
1
Bibliografia
Klasztorny M., Niezgoda T.,
Mechanika ogólna. Podstawy teoretyczne,
zadania z rozwiązaniami, OW PW, Warszawa 2006.
Klasztorny M.,
Mechanika ogólna, DWE, Wrocław 2005.
Wyszukiwarka
Podobne podstrony:
59 MT 01 Lutownica weglowa
58 MT 01 Sanki z kierownica
62 MT 01 Fale elektromagnetyczne
63 MT 01 Mapy
66 MT 01 Apteczka domowa
59 MT 01 Zabawka optyczna
60 MT 01 Wzmacniacz do adaptera
61 MT 01 Naprawa tworzyw szt
62 MT 01 Dowcipna zabawka
61 MT 01 Miniaturowy odbiornik
MT 01 1999 Fiat Seicento Sporting
65 MT 01 Ciecie styropianu
65 MT 01 Korkociag
58 MT 01 Zasilacz
59 MT 01 Warsztatowa łamiglowka
61 MT 01 Motowidlo
59 MT 01 Na wszystko jest sposob
61 MT 01 Usprawnienia warsztatowe
59 MT 01 Podłączenie silniczka
więcej podobnych podstron