
Lista rozkazów mikrokontrolerów rodziny '51.
Zestaw rozkazów mikrokontrolera 8051 został zoptymalizowany pod kątem zastosowań w
układach sterujących. Rozbudowane możliwości operacji na pojedynczych bitach są cechą
charakterystyczną zestawu instrukcji tego mikrokontrolera. Poszczególne rozkazy
określają rodzaj wykonywanej czynności, a ich parametry precyzują obiekt (obiekty), na
których czynność ta ma być wykonana, lub adres pod który ma nastąpić skok. Rozkazy
mikrokontrolera 8051 można podzielić na następujące grupy:
•
operacje arytmetyczne
•
operacje logiczne
•
logiczne na bitach
•
przesyłanie danych
•
sterowanie pracą programu (skoki, skoki warunkowe oraz wywołania i powroty z
podprogramów).
Oprogramowanie tworzy się w asemblerze, najczęściej na komputerze PC, choć istnieją
konstrukcje układów z wykorzystaniem mikrokontrolera 8051 wyposażone w prosty
asembler zawarty w pamięci EPROM (np. system DSM-51 pozwalający wpisać i uruchomić
255 linii programu).
Lista rozkazów mikrokontrolerów rodziny '51 zawiera 111 instrukcji (49 jednobajtowych,
45 dwubajtowych i 17 trzybajtowych). W poniższym zestawieniu uwzględniono jedynie
mnemoniki poszczególnych rozkazów, które są rozpoznawane przez asemblery '51 i one
właśnie są najczęściej stosowane przy tworzeniu programu.
W zestawieniu zastosowano następujące oznaczenia:
Rr - rejestry R0-R7.
direct - obszar wewnętrznej pamięci danych (128B) i rejestry SFR.
@Ri - adres z rejestrów indeksowych R0 lub R1.
bit - bity pamięci danych i SFR adresowalne bezpośrednio.
#data - stała 8-bitowa.
#data16 - stała 16-bitowa.
addr16 - adres 16-bitowy (obszar 64kB).
addr11 - adres 11-bitowy (w stronie 2kB).
rel - adres względny -128...+127.
/bit - negacja bitu.
(n) - rozkaz wykonywany w n cyklach maszynowych. Brak oznaczenia oznacza 1 cykl.
Operacje arytmetyczne:
ADD - dodawanie.
Działanie: A=A+dana.
Dozwolone argumenty: A,Rr A,direct A,@Ri A,#data
Modyfikowane znaczniki: C, AC, OV.
ADDC - dodawanie z przeniesieniem.
Działanie: A=A+dana+C.
Dozwolone argumenty: A,Rr A,direct A,@Ri A,#data
Modyfikowane znaczniki: C, AC, OV.
1

SUBB - odejmowanie z pożyczką.
Działanie: A=A-dana-C.
Dozwolone argumenty: A,Rr A,direct A,@Ri A,#data
Modyfikowane znaczniki: C, AC, OV.
INC - inkrementacja.
Działanie: argument=argument+1
Dozwolone argumenty: A Rr direct @Ri DPTR(2)
DEC - dekrementacja.
Działanie: argument=argument-1.
Dozwolone argumenty: A Rr direct @Ri
MUL - mnożenie liczb 8-bitowych, wynik 16-bitowy.
Działanie: A*B, do A zapisywana młodsza część wyniku, do B starsza.
Dozwolone argumenty: AB
Modyfikowane znaczniki: OV, bit C zerowany.
DIV - dzielenie liczb 8-bitowych, 8-bitowy wynik i 8-bitowa reszta.
Działanie: A/B, A - wynik, B - reszta.
Dozwolone argumenty: AB
Modyfikowane znaczniki: OV, bit C zerowany.
DA - poprawka dziesiętna.
Działanie: wykonuje poprawkę dziesiętną liczby 8-bitowej, przekształcając ją do postaci 2
cyfr w kodzie BCD.
Dozwolone argumenty: A
Modyfikowane znaczniki: C.
Operacje logiczne:
ANL - iloczyn logiczny AND.
Działanie: wykonuje logiczny iloczyn na odpowiednich bitach argumentów, wynik zapisuje
do pierwszego argumentu.
Dozwolone argumenty: A,Rr A,direct A,@Ri A,#data direct,A direct,#data(2)
ORL - suma logiczna OR.
Działanie: wykonuje sumę logiczną odpowiednich bitów argumentów, wynik zapisuje do
pierwszego argumentu.
Dozwolone argumenty: A,Rr A,direct A,@Ri A,#data direct,A direct,#data(2)
XRL - suma mod 2 (XOR).
Działanie: wykonuje sumowanie mod 2 odpowiednich bitów argumentu, wynik zapisuje
do pierwszego z nich.
Dozwolone argumenty: A,Rr A,direct A,@Ri A,#data direct,A direct,#data(2)
CLR - zerowanie (bajtowe).
Działanie: zeruje wszystkie bity argumentu.
Dozwolone argumenty: A.
CPL - negowanie (bajtowe).
Działanie: neguje wszystkie bity argumentu.
Dozwolone argumenty: A.
2

RL - obrót w lewo.
Działanie: przesuwa w lewo zawartość akumulatora.
Dozwolone argumenty: A.
RR - obrót w prawo.
Działanie: przesuwa w prawo zawartość akumulatora.
Dozwolone argumenty: A.
RLC - obrót w lewo przez C.
Działanie: przesuwa w lewo zawartość akumulatora, na miejsce najmłodszego bitu
wpisywana jest dotychczasowa zawartość bitu C, bit najstarszy jest wpisywany jako nowa
wartość C.
Dozwolone argumenty: A.
RRC - obrót w prawo przez C.
Działanie: przesuwa w prawo zawartość akumulatora, na miejsce najstarszego bitu
wpisywana jest dotychczasowa zawartość bitu C, bit najmłodszy jest wpisywany jako
nowa wartość C.
Dozwolone argumenty: A.
SWAP - zamiana 4 bitów bajtu.
Działanie: zamienia miejscami 4 starsze i 4 młodsze bity bajtu.
Dozwolone argumenty: A.
Operacje logiczne na bitach:
CLR - zerowanie.
Działanie: zeruje podany bit.
Dozwolone argumenty: C bit.
SETB - ustawienie bitu.
Działanie: przypisuje danemu bitowi wartość 1.
Dozwolone argumenty: C bit.
CPL - negacja.
Działanie: neguje podany bit.
Dozwolone argumenty: C bit.
ANL
(2)
- iloczyn logiczny AND.
Działanie: wykonuje iloczyn logiczny dwóch bitów, wynik zapisuje w pierwszym.
Dozwolone argumenty: C,bit C,/bit.
ORL
(2)
- suma logiczna OR.
Działanie: wykonuje sumę logiczną dwóch bitów, wynik zapisuje w pierwszym.
Dozwolone argumenty: C,bit C,/bit.
MOV - kopiuj.
Działanie: wpisuje do pierwszego bitu wartość zapisaną w drugim.
Dozwolone argumenty: C,bit bit,C(2).
3

Przesyłanie danych:
MOV - kopiuj.
Działanie: wpisuje do pierwszego operandu zawartość drugiego.
Dozwolone argumenty: A,Rr A,direct A,@Ri A,#data Rr,A Rr,direct(2) Rr,#data direct,A
direct,Rr(2) direct,direct(2) direct,@Ri(2) direct,#data(2) @Ri,A @Ri,direct(2) @Ri,data
DPTR,#data16(2).
MOVC
(2)
- kopiuj z pamięci programu.
Działanie: kopiuje bajt kodu (zawartości pamięci programu).
Dozwolone argumenty: A,@A+DPTR A,@A+PC.
MOVX
(2)
- kopiuj z/do zewnętrznej pamięci danych.
Działanie: kopiuje bajt z/do komórki zewnętrznej pamięci danych wskazanej rejestrem
indeksowym.
Dozwolone argumenty: A,@Ri A,@DPTR @Ri,A @DPTR,A.
XCH - zamień.
Działanie: wymienia między sobą zawartość dwóch rejestrów.
Dozwolone argumenty: A,Rr A,direct A,@Ri.
XCHD - zamień młodsze 4 bity.
Działanie: wymienia między dwoma rejestrami zawartość ich 4 młodszych bitów.
Dozwolone argumenty: A,@Ri.
PUSH
(2)
- przesłanie bajtu na stos.
Działanie: inkrementuje zawartość rejesru SP i kopiuje zawartość komórki pod adres
wskazywany przez SP.
Dozwolone argumenty: direct.
POP
(2)
- pobranie bajtu ze stosu.
Działanie: kopiuje zawartość komórki wskazywanej przez SP do komórki podanej w
wywołaniu i dekrementuje zawartość SP.
Dozwolone argumenty: direct.
Skoki
(2)
:
ACALL - wywołanie podprogramu w stronie 2kB.
Działanie: zapisuje na stos zawartość PC i wykonuje skok do adresu początku procedury.
Dozwolone argumenty: addr11.
LCALL - wywołanie podprogramu.
Działanie: zapisuje na stos zawartość PC i wykonuje skok do adresu początku procedury.
Dozwolone argumenty: addr16.
RET - powrót z procedury.
Działanie: pobiera ze stosu zawartość licznika rozkazów i przekazuje sterowanie do
znajdującego się tam adresu.
RETI - powrót z procedury obsługi przerwania.
Działanie: pobiera ze stosu zawartość licznika rozkazów i przekazuje sterowanie do
znajdującego się tam adresu.
4

LJMP - rozkaz skoku w obszarze 64kB.
Działanie: wpisuje do licznika rozkazów podany adres.
Dozwolone argumenty: addr16.
AJMP - rozkaz skoku w stronie 2kB.
Działanie: zastępuje 11 młodszych bitów PC wartością podaną w wywołaniu.
Dozwolone argumenty: addr11.
SJMP - rozkaz skoku w obszarze 256B.
Działanie: następuje zmiana zawartości PC o wartość w kodzie U2 podaną w wywołaniu.
Dozwolone argumenty: rel.
JMP - rozkaz skoku w trybie pośrednim.
Działanie: przepisuje do PC wartość będącą sumą zawartości rejestru indeksowego i
bazowego.
Dozwolone argumenty: @A+DPTR.
JZ - skok warunkowy.
Działanie: wykonuje skok, jeżeli zawartość akumulatora równa jest 0.
Dozwolone argumenty: rel.
JNZ - skok warunkowy.
Działanie: wykonuje skok, jeżeli zawartość akumulatora jest różna od 0.
Dozwolone argumenty: rel.
JC - skok warunkowy.
Działanie: wykonuje skok, jeżeli bit przeniesienia C jest ustawiony.
Dozwolone argumenty: rel.
JNC - skok warunkowy.
Działanie: wykonuje skok, jeżeli bit przeniesienia C jest wyzerowany.
Dozwolone argumenty: rel.
JB - skok warunkowy.
Działanie: wykonuje skok, jeżeli dany bit jest ustawiony.
Dozwolone argumenty: bit,rel.
JNB - skok warunkowy.
Działanie: wykonuje skok, jeżeli dany bit jest wyzerowany.
Dozwolone argumenty: bit,rel.
JBC - skok warunkowy.
Działanie: gdy dany bit jest ustawiony, to nastąpi skok i wyzerowanie bitu.
Dozwolone argumenty: bit,rel.
CJNE - skok warunkowy, zależny od wyniku porównania.
Działanie: następuje porównanie operandów, jeżeli są różne, to następuje skok.
Dozwolone argumenty: A,direct,rel A,#data,rel Rr,#data,rel @Ri,#data,rel.
Modyfikowane znaczniki: C (ustawiany, jeżeli pierwszy operand mniejszy od drugiego).
DJNZ - skok warunkowy, zależny od wyniku dekrementacji.
Działanie: następuje dekrementacja zawartości operandu, jeżeli zawartość nie osiągnęła
zera, to nastąpi skok.
Dozwolone argumenty: Rr,rel direct,rel.
5

Specyficznym rozkazem nie kwalifikującym się do powyższych grup jest rozkaz NOP (jego
kod binarny to 00H). Jego wykonanie nie wywołuje żadnych efektów, zajmuje jedynie
czas 1 cyklu maszynowego. Często jest on wykorzystywany jako rezerwacja miejsca
pamięci przeznaczonego na późniejszą rozbudowę programu, lub jako niewielkie (1 cykl)
opóźnienie w wykonywaniu programu.
6

Wstęp
Jednym z najpopularniejszych obecnie mikrokontrolerów 8-bitowych, jest układ 8051. Na
jego bazie powstała duża rodzina mikrokontrolerów. Poszczególne układy rodziny różnią
się między sobą zestawem, scalonych razem z procesorem, urządzeń peryferyjnych.
Strona ta ma na celu przedstawienie ogólnej architektury oraz budowy jednego z
najpopularniejszych obecnie: mikrokontroler 8051. Układ ten jest jedną z najlepszych
metod nauczenia się metod i sposobów programowania. Mikrokontroler 8051 jest
programowany na poziomie asemblera (tzw. Język programowania niskiego poziomu).Dla
użytkownika rozkazy zapisane są w postaci symbolicznej, znacznie czytelniejszej dla
człowieka niż cała masa zer i jedynek. Umożliwia on również pracę na komputerze
połączonym z układem DSM-51 Za pomocą kabla RS232 (port COM1 systemu z wolnym
portem komputera). Po włączeniu zasilania system wypisuje na wyświetlaczu: DSM-51
MODE 0 >>PC CONTROL<< i oczekuje na polecenia z komputera. Polecenia te mogą być
wydawane przez program DSM51.EXE lub DSM51RUN.EXE. Służą one przede wszystkim
do przesłania programu użytkownika z komputera i uruchomieniu go w systemie DSM-51.
Dzięki systemowi transmisji równoległej 8255 (zawartym w układzie) jest możliwe
również dołączenie do mikrokontrolera zewnętrznych układów sterowanych przez system
DSM-51. Najprostszym przykładem jest model przedstawiający skrzyżowanie dróg, które
po podłączeniu do układu steruje sygnalizacją świetlną skrzyżowania. Układ ten posiada
masę innych zalet tu nie wymienionych tak więc niewątpliwie mikrokontroler 8051 jako
jeden z najuniwersalniejszych, a zarazem najprostszych urządzeń tego typu zasługuje na
uwagę i zainteresowanie.
7

Aby poznać i zrozumieć działanie i zastosowania mikrokontrolera 8051 należy najpierw
zrozumieć czym są mikrokontrolery oraz czym różnią się one od mikroprocesorów. Tak
więc mikrokontroler to pojedynczy układ scalony, w którym w jednej strukturze zawarto
mikroprocesor oraz pewien zestaw często potrzebnych elementów zewnętrznych. Takie
połączenie umożliwia budowę kompletnych sterowników mikroprocesorowych, w których
wszystkie funkcje spełnia jeden układ scalony.
Z kolei mikroprocesor (µP) jest automatem sekwencyjnym, synchronicznym
wykonującym dołączony z zewnątrz program. Częstotliwość zegara µP. decydująca m.in.
o szybkości pracy jest ograniczona zawsze od góry i przeważnie od dołu. Wykonywany
program składa się z tzw. rozkazów (instrukcji), są to niepodzielne dla programisty
czynności, które może wykonać µP. Zwykle występują µP. z tzw. stałą listą instrukcji
narzuconą przez projektanta µP. która może być albo uniwersalna albo zorientowana (np.
w kierunku przetwarzania danych, sterowania, przetwarzania sygnałów analogowych w
postaci cyfrowej). Ponadto występują także rozwiązania w których wykorzystujący µP.
definiuje własną listę rozkazów, składając je z czynności prostych. Sekwencje tych
czynności są zawarte w dołączonej zewnętrznie, tzw. stałej pamięci mikroprogramu. W
µP. o stałej liście instrukcji pamięć taka znajduje się wewnątrz struktury. Namiastką
własnych rozkazów są tak zwane emulatory, tj. Instrukcje wywołujące zdefiniowaną
wcześniej sekwencję rozkazów nie na zasadzie instrukcji CALL, lecz posiłkując się
numerem emulatora (adres znajduje się w tabeli stanów wyjątkowych). W zależności od
tego ile bitów może równolegle przetwarzać µP. mówimy o układach 4, 8, 12, 16, 32, 64-
bitowych. Aby powstał system µP. musimy doń dołączyć pamięć programu, pamięć
danych i niezbędne układy peryferyjne (wejścia / wyjścia). W skład typowego µP.
wchodzą następujące podzespoły:
Licznik programu PC (program counter). Służy do adresacji pobieranego przez µP.
kodu programu z dołączonej pamięci.
Układ arytmetyczno-logiczny ALU. Z tym układem wykonawczym związany jest rejestr
tzw. bitów warunkowych (statusowy, flagowy), którego poszczególne bity informują o
efekcie przeprowadzonej w ALU operacji.
Wskaźnik stosu SP (stack pointer). Podstawowym zastosowaniem SP jest
zapamiętywanie adresu powrotnego przy wywołaniu z różnych miejsc tej samej
procedury.
Rejestry. Rejestry wewnętrzne dostępne software'owo służą do chwilowego
przechowywania danych, adresów, tzw. przesunięć, bądź wartości indeksujących co
związane jest z różnymi trybami adresacji argumentów.
Układy sterowania, synchronizacji, zegarowe, multipleksery, bufory szyn
zewnętrznych, dekodery instrukcji, które zapewniają właściwe działanie µP., układy te z
oczywistych względów nie występują w zapisie kodu programów. µP. łączy się z
pamięciami i układami we. / wy. Za pomocą szeregu sygnałów (jedno-, dwukierunkowe,
trójstanowe, typu otwarty kolektor OC). Sygnały te łączymy w zespoły funkcjonalne tzw.
szyny. Wyróżniamy szyny:
- adresową
- danych
- sterującą
8

Pozostałe cechy układu 8051 to:
rozbudowane zasoby wewnętrzne (np. programowalne układy czasowe, układ
transmisji szeregowej, układ przerwań, wewnętrzna pamięć programu i danych),
możliwość dołączenia zewnętrznej pamięci programu i danych po 64 kB każda,
rozwinięta, jednolita lista rozkazów.
Wady układu to:
brak możliwości współpracy z innymi układami czynnymi (np. DMA) na wspólnej
szynie,
brak możliwości współpracy z wolnymi układami we/wy i wolnymi pamięciami.
Mikrokomputery rodziny MCS-51 są aktualnie produkowane w wielu odmianach przez
wiele firm. Poszczególne układy są jednak zgodne pod względem programowym z ich
pierwowzorem, zazwyczaj posiadają jakieś dodatkowe elementy lub rozbudowane zasoby
8051.
9
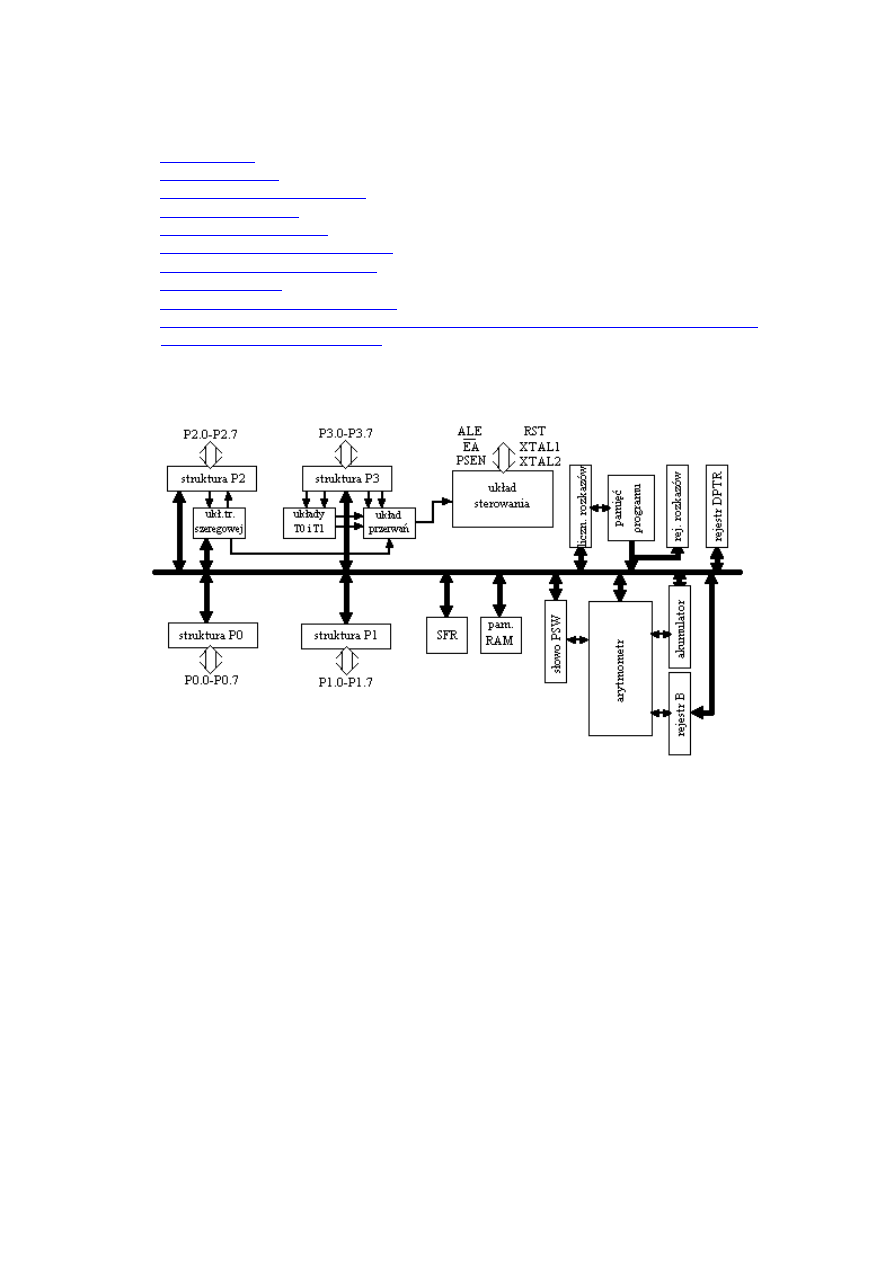
W mikrokontrolerze 8051 możemy wyróżnić następujące bloki:
•
•
•
•
•
•
•
•
•
generator sygnału taktującego,
•
układ sterowania (wraz ze sterowaniem trybami uśpienia - obniżonego poboru
Rysunek przedstawia uproszczony schemat blokowy mikrokontrolera 8051.
Cykl maszynowy mikrokontrolera 8051 składa się z sześciu stanów oznaczonych S1 do
S6. Każdy ze stanów trwa dwa okresy sygnału taktującego, oznaczonych jako fazy P1 i
nbsp;P2. Wynika z nbsp;tego, że czas trwania cyklu maszynowego wynosi 12 taktów
zegara, co dla częstotliwości rezonatora równej 12MHz daje czas 1us. Czas wykonywania
instrukcji wynosi jeden, dwa lub cztery cykle maszynowe, w zależności od instrukcji. Na
rysunku przedstawiono cztery różne cykle rozkazowe dla czterech różnych instrukcji.
10
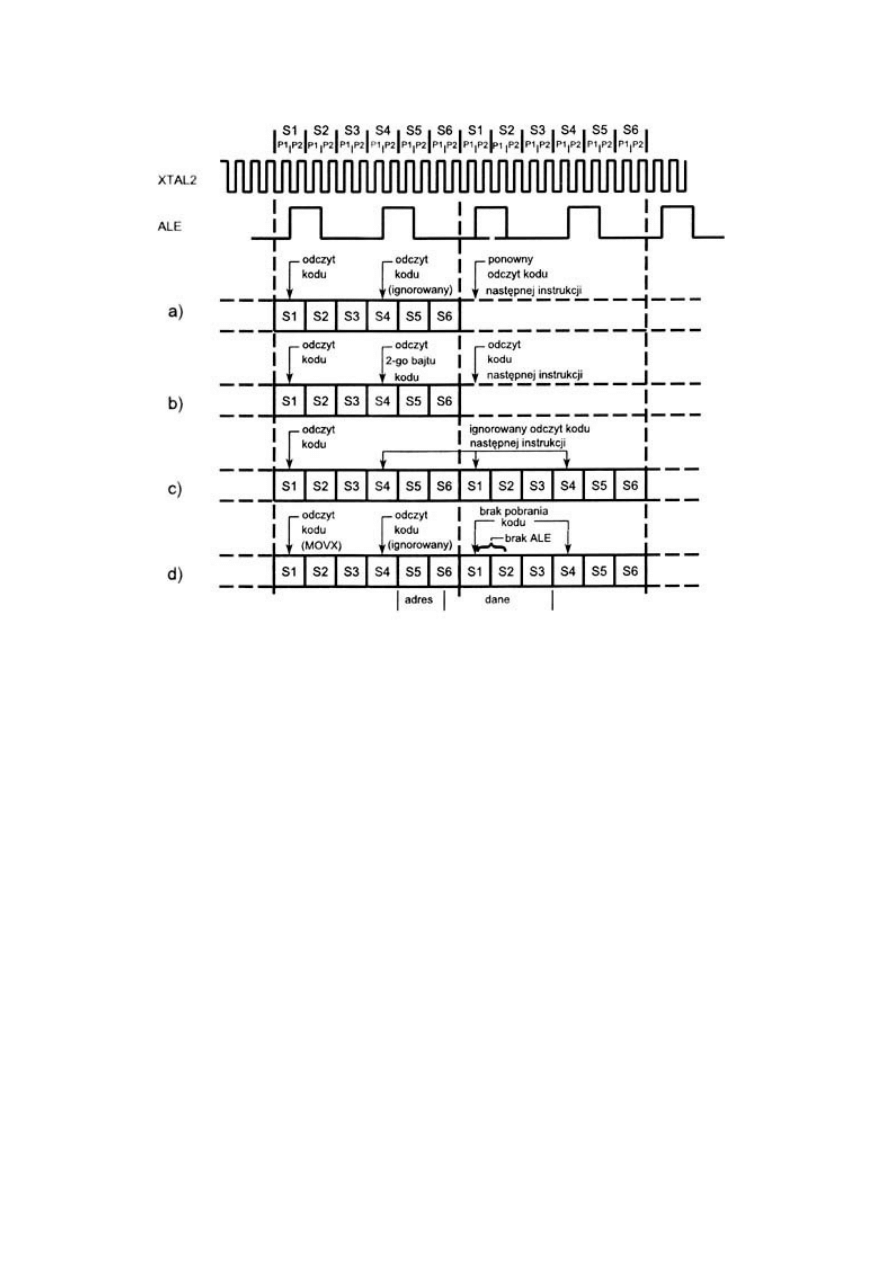
Przebieg a) przedstawia cykl rozkazowy instrukcji jednobajtowej wykonywanej w
nbsp;pojedynczym cyklu maszynowym, przebieg b) przedstawia przypadek wykonywania
instrukcji dwubajtowej wykonywanej w pojedynczym cyklu maszynowym, przebieg c)
obrazuje wykonanie instrukcji jednobajtowej wykonywanej w nbsp;ciągu dwóch cykli
maszynowych.
W związku z nbsp;multipleksowaniem szyny adresowej A0-A7 i szyny danych,
mikrokontroler musi generować dodatkowy sygnał sterujący zewnętrznym buforem
zatrzaskowym - tym sygnałem jest ALE. Sygnał ten jest generowany podczas pobierania
każdego słowa rozkazu dwukrotnie w każdym cyklu maszynowym. Wyjątek stanowi
rozkaz MOVX (oraz MOVC przy dostępie do zewnętrznej pamięci programu) realizujący
dostęp do pamięci zewnętrznej. Instrukcja ta jest jednobajtowa, wykonywana w
nbsp;dwóch cyklach maszynowych. W nbsp;pierwszym cyklu następuje odczyt kodu
instrukcji (pierwszy sygnał ALE) oraz ustawienie adresu żądanej komórki pamięci (drugi
sygnał ALE). W nbsp;drugim cyklu maszynowym następuje odczyt/zapis szyny danych -
nie może wówczas wystąpić sygnał ALE, gdyż zniszczyłby on nbsp; wcześniej ustawiony
adres komórki pamięci.
11
Arytmometr
Podstawowymi elementami składowymi arytmometru są:
•
8-bitowa jednostka arytmetyczno-logiczna z układem korekcji dziesiętnej,
•
rejestry pomocnicze używane przy wykonywaniu obliczeń (niedostępne dla
programisty),
•
dekoder rozkazów.
Z arytmometrem współpracują ponadto dwa rejestry
akumulator (ACC) irejestr B. Akumulator najczęściej zawiera jeden zoperandów i
zapisywany jest w nim wynik operacji, rejestr B jest natomiast wykorzystywany przy
operacjach mnożenia i dzielenia.
Argumentami operacji wykonywanych przez arytmometr mogą być również inne rejestry
specjalne, komórki pamięci lub dane podawane bezpośrednio.
Arytmometr może wykonywać następujące operacje za argumentach ośmiobitowych:
•
dodawanie,
•
dodawanie z nbsp;przeniesieniem,
•
odejmowanie z nbsp;pożyczką,
•
inkrementacja,
•
dekrementacja,
•
mnożenie w nbsp;naturalnym kodzie binarnym dające 16-bitowy wynik,
•
dzielenie w nbsp;naturalnym kodzie binarnym dające 8-bitowy wynik i nbsp;8-
bitową resztę,
•
iloczyn logiczny, suma logiczna i nbsp;suma modulo 2,
•
zerowanie, negacja i nbsp;rotacja zawartości akumulatora,
•
korekcja dziesiętna zawartości akumulatora.
Arytmometr może wykonywać operacje logiczne również na pojedynczych bitach. Dla
tych operacji akumulatorem jest bit przeniesienia C słowa stanu PSW.
Rejestr specjalny PSW nbsp; bezpośrednio współpracuje z nbsp;arytmometrem. Jego
zawartość opisuje cechy wyniku ostatnio wykonywanej operacji.
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
C
AC
F0
RS1
RS0
OV
-
P
Słowo stanu PSW
Znaczenie poszczególnych bitów jest następujące:
P (ang. parity) - znacznik parzystości; ustawiony na "1" informuje o nbsp;nieparzystej
liczbie jedynek w nbsp;akumulatorze. Jest ustawiany po wykonaniu każdego rozkazu, w
nbsp;zależności od zawartości akumulatora.
OV (ang. overflow) - znacznik nadmiaru dla dodawania i odejmowania w nbsp;kodzie U2.
Dla mnożenia "1" wskazuje niezerową wartość rejestru B, dla dzielenia "1" oznacza
wystąpienie dzielenia przez zero.
RS0, RS1 - bity wyboru bloku rejestrów roboczych.
RS1 RS0
Wybrany blok:
12

0
0
blok 0
0
1
blok 1
1
0
blok 2
1
1
blok 3
Znaczenie bitów RS0 i RS1
F0 - znacznik uniwersalny do dowolnego wykorzystania.
AC (ang. auxiliary carry) - znacznik przeniesienia połówkowego; ustawiany w
nbsp;przypadku wystąpienia przeniesienia z nbsp;ACC.3 na ACC.4.
C (ang. carry) - znacznik przeniesienia; ustawiany w przypadku wystąpienia przeniesienia
z nbsp;pozycji siódmego bitu akumulatora.
13
Pamięć danych
Na wewnętrzną pamięć danych składają się dwa bloki: 128 bajtów ciągłego obszaru
pamięci RAM oraz obszar 128 bajtów niespójnego
bloku rejestrów specjalnych (SFR)
mikrokontrolera.
Adresy 48-127 (30H-7FH)
Pamięć danych użytkownika
Adresy 32-47 (20H-2FH)
Pamięć adresowana bitowo (adresy 0-127 (0H-7FH))
Adresy 24-31 (18H-1FH)
Rejestry R0-R7 - blok 3
Adresy 16-23 (10H-17H)
Rejestry R0-R7 - blok 2
Adresy 8-15 (8H-0FH)
Rejestry R0-R7 - blok 1
Adresy 0-7 (0H-7H)
Rejestry R0-R7 - blok 0
Mapa pamięci RAM mikrokontrolera 8051.
Obszar od adresu 0 do 31 (0H-1FH) zajmują cztery banki rejestrów roboczych, po osiem
rejestrów w banku (wybierane bitami RS1 i RS0 rejestru PSW). Rejestry te mają
oznaczenia R0 do R7 i mogą być wykorzystywane do przechowywania danych. Wyjątek
stanowią rejestry R0 i R1 każdego bloku, które mogą być wykorzystane do indeksowego
adresowania wewnętrznej i zewnętrznej pamięci danych. Po wyzerowaniu
mikrokontrolera sygnałem RST użytkownik ma do dyspozycji blok 0.
Obszar pamięci o adresach 32-47(20H-2FH) może być używany do przechowywania
dowolnych danych wykorzystywanych wprogramie. Cechą tego obszaru jest to, że
możliwe jest zaadresowanie pojedynczego bitu komórki pamięci. Bity te są dostępne pod
adresami 0-127 (0H-7FH), aadres bitu, który chcemy zaadresować, można określić przy
użyciu wzoru: (n-32)*8+i, gdzie n jest adresem słowa pamięci, a i jest numerem bitu w
tym słowie. Wynika z tego, że adresy te pokrywają się z adresami komórek pamięci,
jednak nie stanowi to przeszkody, gdyż do pojedynczych bitów odwołują się specyficzne
rozkazy mikrokontrolera, co pozwala jednoznacznie stwierdzić czy adresowana jest
komórka czy pojedynczy bit.
Obszar pamięci o adresach 48-127 (30H-7FH) nie posiada już żadnych specyficznych
własności i wykorzystywany jest jak zwykła pamięć o organizacji bajtowej.
Mimo różnych własności poszczególnych obszarów pamięci, cała pamięć może być
adresowana jak pamięć o bajtowej organizacji w sposób bezpośredni lub indeksowy przy
użyciu rejestrów R0 i R1.
W wewnętrznej pamięci danych umieszczany jest stos programu. Może on być
umieszczony w dowolnym miejscu przez zapis odpowiedniego adresu do rejestru SP
będącego wskaźnikiem stosu, jednak po wyzerowaniu mikrokontrolera sygnałem RST
wskaźnik stosu przyjmuje wartość 7. SP należy do bloku rejestrów specjalnych, a jego
zawartość wskazuje na ostatnie zajęte słowo stosu. Wskaźnik stosu jest inkrementowany
przed każdym zapisem na stos i dekrementowany po każdym odczycie.
Oprócz pamięci wewnętrznej danych możliwe jest dołączenie do mikrokontrolera
zewnętrznej pamięci danych o pojemności do 64kB. Ponieważ mikrokontroler nie posiada
osobnych rozkazów do dostępu do urządzeń wejścia-wyjścia, to w obszarze adresowym
64kB zewnętrznej pamięci danych mogą być również umieszczane rejestry dołączanych
do systemu urządzeń we/wy.
Blok rejestrów specjalnych mikrokontrolera 8051
14
Blok rejestrów specjalnych (SFR; ang. Special Function Registers) znajduje się w
niespójnym obszarze
mikrokontrolera o adresach 128-240 (80H-0F0H).
Obszar rejestrów SFR mikrokontrolera '51 jest wykorzystywany dwojako - z jednej strony
umieszczone są w nim wszystkie (za wyjątkiem licznika rozkazów i czterech banków
rejestrów R0-R7) rejestry sterujące pracą mikrokontrolera lub wykorzystywane
bezpośrednio przy wykonywaniu programu; z drugiej zaś strony rejestry SFR stanowią
rodzaj interfejsu pomiędzy mikroprocesorem a układami peryferyjnymi umieszczonymi
wewnątrz mikrokontrolera. Wszystkie operacje sterowania wewnętrznymi układami
peryferyjnymi oraz przesyłania danych między nimi a CPU, odbywają się właśnie za
pośrednictwem rejestrów SFR. Dostęp do każdego z tych rejestrów możliwy jest
wyłącznie w trybie adresowania bezpośredniego. Nazwy rejestrów SFR są zazwyczaj
nazwami predefiniowanymi w asemblerach mikrokontrolerów rodziny '51, więc
najczęściej nie trzeba znać adresu danego rejestru - wystarczy pamiętać jego nazwę.
Nazwa
Adres
Pełniona funkcja
P0
128 (80H)
Port we/wy 0
SP
129 (81H)
Wskaźnik stosu
DPL
130 (82H)
Rejestr indeksowy DPTR (mniej znaczący bajt)
DPH
131 (83H)
Rejestr indeksowy DPTR (bardziej znaczący bajt)
PCON
135 (87H)
Rejestr sterujący stanami uśpienia
TCON
136 (88H)
Rejestr sterujący układów czasowych 0 i 1
TMOD
137 (89H)
Rejestr trybu pracy układów czasowych 0 i 1
TL0
138 (8AH) Rejestr danych układu czasowego 0 (mniej znaczący)
TL1
139 (8BH) Rejestr danych układu czasowego 1 (mniej znaczący)
TH0
140 (8CH) Rejestr danych układu czasowego 0 (bardziej znaczący)
TH1
141 (8DH) Rejestr danych układu czasowego 1 (bardziej znaczący)
P1
144 (90H)
Port we/wy 1
SCON
152 (98H)
Rejestr sterujący układu transmisji szeregowej
SBUF
153 (99H)
Rejestr danych układu transmisji szeregowej
P2
160 (0A0H) Port we/wy 2
IE
168 (0A8H) Rejestr maski przerwań
P3
176 (0B0H) Port we/wy 3
IP
184 (0B8H) Rejestr priorytetów przerwań
PSW
208 (0D0H) Słowo stanu procesora
ACC
224 (0E0H) Akumulator
B
240 (0F0H)
Rejestr ogólnego przeznaczenia
Rejestry specjalne mikrokontrolera 8051.
Dodatkowo wszystkie rejestry umieszczone pod adresami podzielnymi przez 8 dostępne
są także bitowo. Adres określonego bitu można określić posługując się zależnością
adres=m+n, gdzie "m" jest adresem rejestru SFR, a "n" jest numerem adresowanego
bitu (licząc od 0).
15
Rejestry SFR adresowalne bitowo.
Nazwy i adresy poszczególnych bitów.
SFR
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
P0
P0.7
135
P0.6
134
P0.5
133
P0.4
132
P0.3
131
P0.2
130
P0.1
129
P0.0
128
TCON
TF1
143
TR1
142
TF0
141
TR0
140
IE1
139
IT1
138
IE0
137
IT0
136
P1
P1.7
151
P1.6
150
P1.5
149
P1.4
148
P1.3
147
P1.2
146
P1.1
145
P1.0
144
SCON
SM0
159
SM1
158
SM2
157
REN
156
TB8
155
RB8
154
Ti
153
RI
152
P2
P2.7
167
P2.6
166
P2.5
165
P2.4
164
P2.3
163
P2.2
162
P2.1
161
P2.0
160
IE
EA
175
-
174
ET2
173
ES
172
ET1
171
EX1
170
ET0
169
EX0
168
P3
P3.7
183
P3.6
182
P3.5
181
P3.4
180
P3.3
179
P3.2
178
P3.1
177
P3.0
176
IP
-
191
-
190
PT2
189
PS
188
PT1
187
PX1
186
PT0
185
PX0
184
PSW
C
215
AC
214
F0
213
RS1
212
RS0
211
OV
210
-
209
P
208
ACC
ACC.7
231
ACC.6
230
ACC.5
229
ACC.4
228
ACC.3
227
ACC.2
226
ACC.1
225
ACC.0
224
B
B.7
247
B.6
246
B.5
245
B.4
244
B.3
243
B.2
242
B.1
241
B.0
240
Niektóre spośród rejestrów SFR, które nie są aktualnie wykorzystywane do sterowania
zasobami mikrokontrolera można wykorzystać jako pamięć o dostępie bezpośrednim,
jednak pod warunkiem, że zmiana zawartości danego rejestru nie wpłynie na pracę
programu i funkcjonowanie mikrokontrolera.
Pamięć programu mikrokontrolera 8051
16
Standardowy mikrokontroler 8051 posiada 4KB pamięci programu typu ROM
programowane maską. Niektóre wersje układu posiadają pamięć EPROM lub EEPROM.
Pamięć programu przechowuje kody operacji przeznaczonych do wykonania przez
mikroprocesor, może także służyć do przechowywania stałych używanych w programie.
Pamięć programu adresowana jest przez 16-bitowy licznik rozkazów (PC, ang. Program
Counter). Mikrokontroler 8051 może także korzystać z zewnętrznej pamięci programu o
pojemności do 64KB. To, z której z tych pamięci pobierane są rozkazy zależy od stanu
wyprowadzenia EA'. W przypadku korzystania z wewnętrznej pamięci programu,
wyprowadzenie EA' musi być ustawione w stan wysoki. Jeśli pojemność wewnętrznej
pamięci programu jest niewystarczająca, część programu może być umieszczona w
pamięci zewnętrznej. Wówczas dopóki wartość licznika rozkazów nie przekracza rozmiaru
wewnętrznej pamięci programu, rozkazy pobierane są z pamięci wewnętrznej.
Przekroczenie przez licznik rozkazów wartości 0FFFH powoduje pobieranie rozkazów z
zewnętrznej pamięci programu. Jeśli mikrokontroler ma korzystać wyłącznie z
zewnętrznej pamięci programu, wyprowadzenie EA' musi być ustawione w stan niski. W
większości mikrokontrolerów rodziny '51 wyprowadzenie EA' nie posiada wewnętrznego
rezystora podciągającego i nie może pozostawać nie podłączone ("wisieć w powietrzu").
Zerowanie (RST) mikrokontrolera powoduje ustawienie licznika rozkazów w stan 0000H,
tak więc początek programu musi być umieszczony pod adresem 0000H. Zwykle
umieszczana jest tam instrukcja skoku do dalszego obszaru pamięci programu, ponieważ
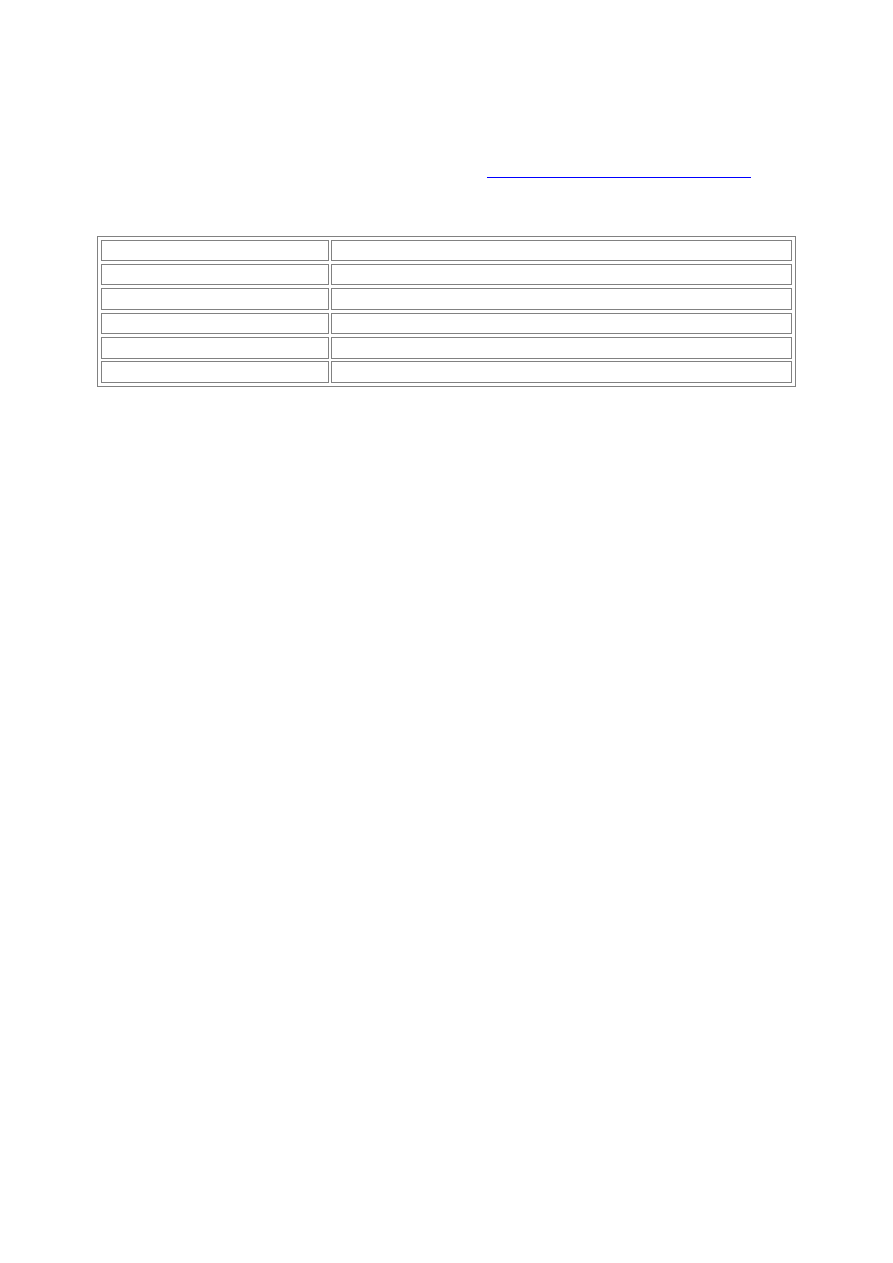
począwszy od adresu 0003H pierwsze kilkadziesiąt bajtów wykorzystywane jest przez
procedury obsługi przerwań:
Adres
Zawartość
0003H Początek procedury obsługi przerwania zewnętrznego INT0'
000BH Początek procedury obsługi przerwania z układu czasowego T0
0013H Początek procedury obsługi przerwania zewnętrznego INT1'
001BH Początek procedury obsługi przerwania z układu czasowego T1
0023H
Początek procedury obsługi przerwania z układu transmisji szeregowej
Umieszczenie procedur obsługi przerwań 8051 w pamięci programu.
PC zawiera adres aktualnego rozkazu przeznaczonego do wykonania. Rozkaz ten jest
pobierany z pamięci do rejestru rozkazów (rejestr ten nie jest dostępny programowo). Na
podstawie zawartości rejestru rozkazów, dekoder rozkazów steruje wyborem źródła
argumentu, miejsca umieszczenia wyniku, funkcjami arytmometru itp. - w ten sposób
mikroprocesor wykonuje zadaną operację. Jeżeli nie jest wykonywany rozkaz skoku, to
zawartość licznika rozkazów jest inkrementowana po odczycie każdego bajtu z pamięci
programu.
Porty wejścia/wyjścia mikrokontrolera 8051
17
Linie we/wy mikrokontrolera 8051 pogrupowane są w cztery 8-bitowe porty:
- linie P0.0/AD0 - P0.7/AD7
- linie P1.0 - P1.7
- linie P2.0/A8 - P2.7/A15
- linie P3.0/RxD', P3.1/TxD', P3.2/INT0', P3.3/INT1', P3.4/T0, P3.5/T1,
P3.6/WR', P3.7/RD'
Wszystkie linie portów P0-P3 pracujące jako standardowe linie wejścia/wyjścia są
niezależne pod względem kierunku przesyłania informacji. Rejestry P0-P3 złożone z
przerzutników poszczególnych linii wchodzą w skład
czym możliwe jest adresowanie ich poszczególnych bitów, co umożliwia bezpośrednie
sterowanie pojedynczymi liniami we/wy. Funkcje i struktura linii we/wy są odmienne dla
każdego z układów P0-P3
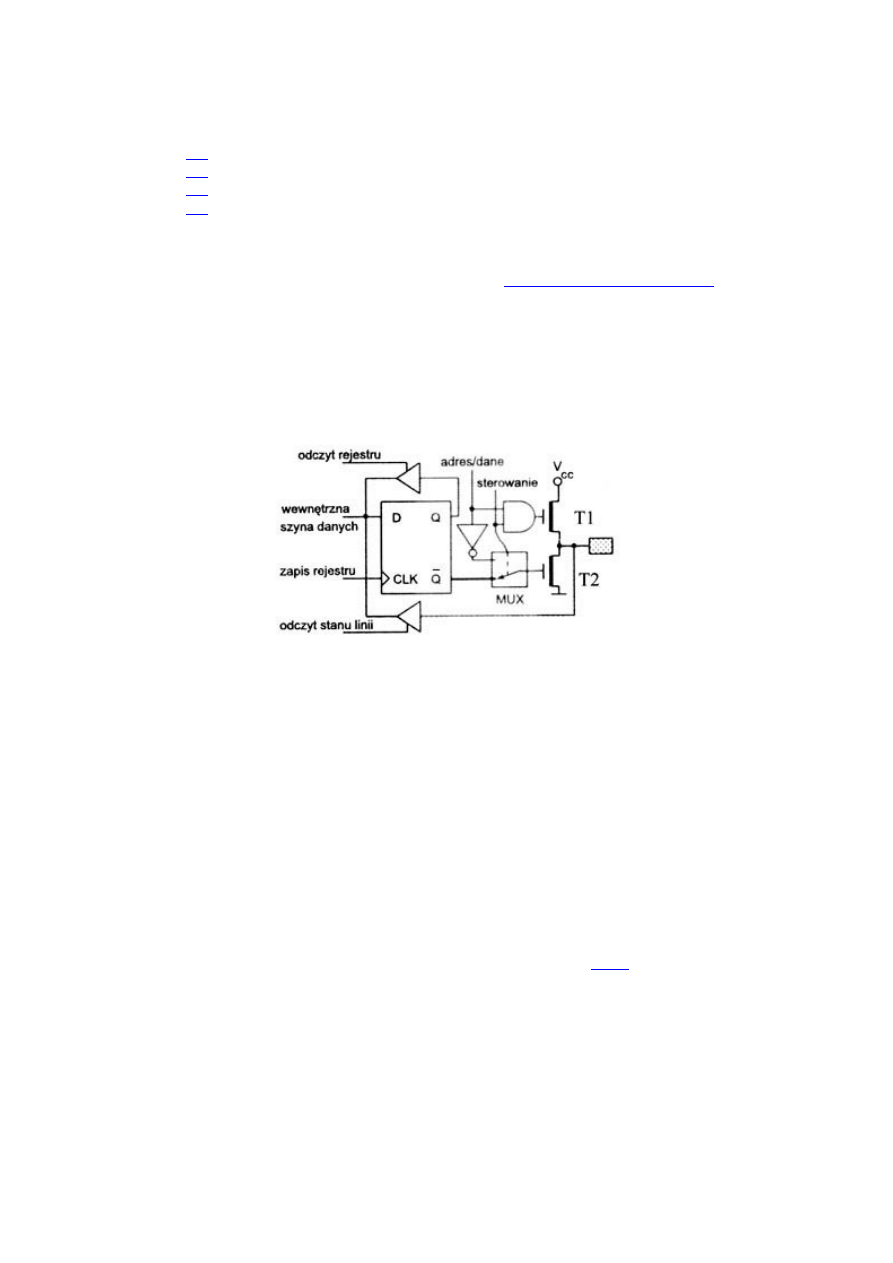
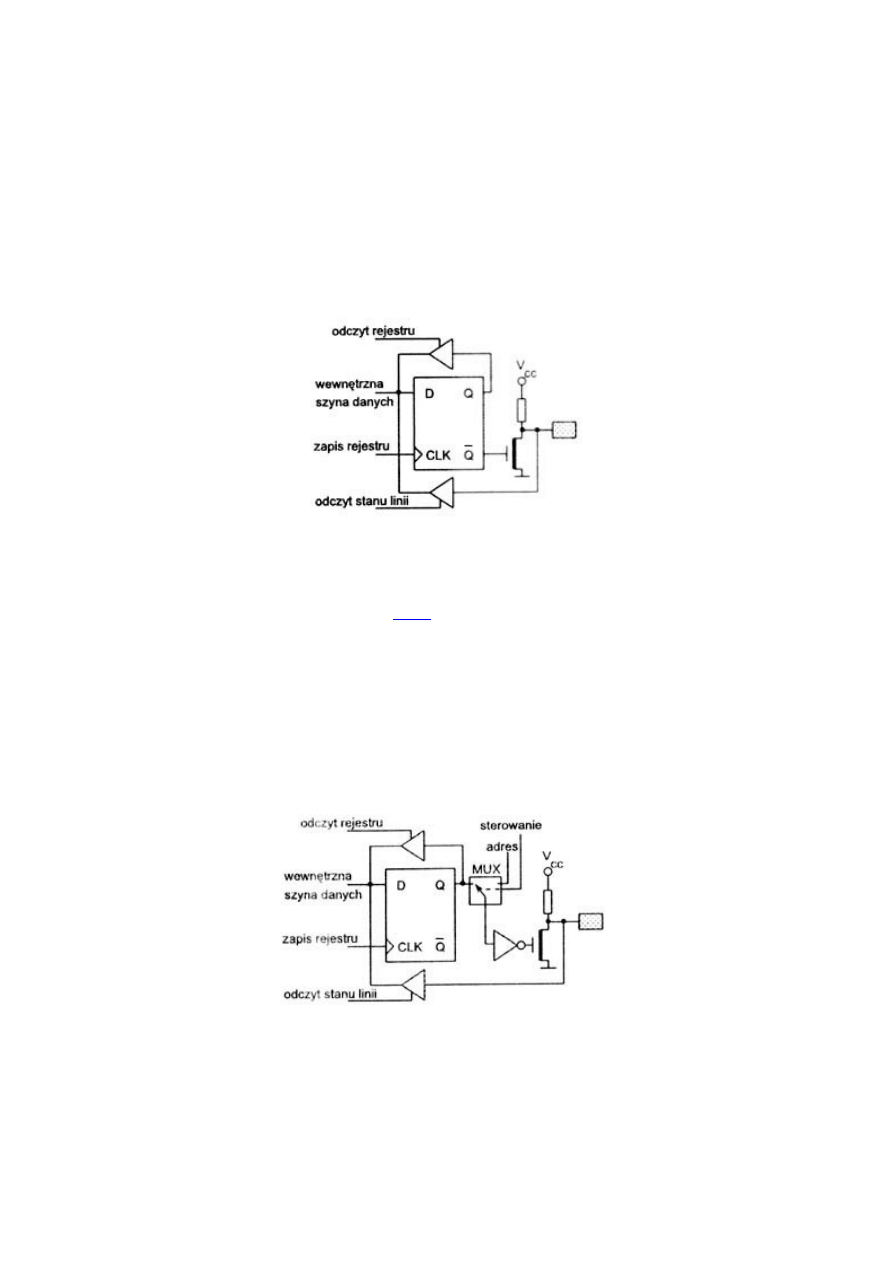
Struktura portu P0.
Na rysunku przedstawiono strukturę pojedynczej linii portu P0. Osiem takich struktur
tworzy port P0 dostępny poprzez blok rejestrów specjalnych. W czasie normalnej pracy
jako wejście/wyjście (stan 0 na linii sterowanie) tranzystor T1 jest wyłączony, a stan
tranzystora T2 zależy bezpośrednio od stanu przerzutnika D, który wchodzi w skład
rejestru P0 bloku SFR. Jeżeli w przerzutniku zapisana jest jedynka, to tranzystor T2 jest
wyłączony i wyjście układu przechodzi w stan wysokiej impedancji. W przypadku
wpisania zera, T2 jest włączony i na wyjściu panuje stan niski. Wyjścia układu P0
podczas wyprowadzania informacji zachowują się jak linie typu otwarty dren. Wymaga to
dołączenia zewnętrznego rezystora podciągającego w celu uzyskania wysokiego poziomu
napięcia odpowiadającego jedynce wpisanej do przerzutnika. Podczas wprowadzania
informacji stan linii zewnętrznej jest wprowadzany poprzez bufor na wewnętrzną szynę
danych, jednak aby odczyt linii portu był możliwy, wcześniej do przerzutnika musi zostać
wpisana jedynka.
Istnieje grupa rozkazów mikrokontrolera, które odczytują, modyfikują i ponownie
zapisują zawartość rejestru P0 (P1, P2, P3). Są to rozkazy typu
(ang. Read-Modify-
Write). Poszczególne bity rejestru odczytywane są przez bufory dołączone do wyjścia Q
przerzutnika, ich wartość jest przekazywana do arytmometru, gdzie następuje wykonanie
operacji, a następnie nowa wartość jest ponownie wprowadzana do przerzutnika.
Układ P0 oprócz funkcji we/wy pełni rolę szyny danych multipleksowanej z mniej
znaczącą częścią szyny adresowej podczas realizacji dostępu do pamięci zewnętrznej.
Wtedy stan linii sterującej S=1 i tranzystory T1 i T2 są sterowane wewnętrzną linią
adresu/danych. Poziom niski włącza T2 i wyłącza T1 co powoduje stan "0" na wyjściu
układu; poziom wysoki wyłącza T2 i włącza T1 powodując stan wysoki na wyjściu - nie
ma przy tym konieczności instalowania rezystora podciągającego. Dane z szyny danych
18
odczytywane są w taki sam sposób jak przy pracy portu jako wejście/wyjście.
Wykonanie dostępu do pamięci zewnętrznej powoduje zapisanie samych jedynek do
rejestru P0, niszcząc tym samym przechowywaną w nim informację. Z tego powodu
korzystanie z pamięci zewnętrznej wyklucza w zasadzie możliwość korzystania z P0 jako
wejścia/wyjścia. Każdą linię portu P0 można obciążyć ośmioma wejściami TTL-LS.
Struktura portu P1.
Na rysunku przedstawiono pojedynczą linię portu P1. Przerzutnik D będący jej
elementem wchodzi w skład rejestru P1 bloku SFR. Modyfikacji stanu przerzutnika D
można dokonać rozkazami zapisu lub
, tak jak w przypadku układu P0. Przerzutnik
D steruje bezpośrednio tranzystorem wyjściowym. Rezystor zapewnia ustalenie
wysokiego poziomu napięcia przy wyłączonym tranzystorze (jedynka w przerzutniku).
Podczas wprowadzania informacji rozkazami odczytu linii zewnętrznej wymagane jest
zapisanie jedynki do przerzutnika D. Linie układu P1 nie pełnią żadnych dodatkowych
funkcji. Można je obciążać czterema wejściami TTL-LS.
Struktura portu P2.
Na rysunku przedstawiono budowę pojedynczej linii portu P2. Zasada działania linii portu
P2 jest taka sama jak portu P1, pod warunkiem, że dodatkowe funkcje tego układu nie są
wykorzystywane (stan niski na linii sterowanie). Dodatkowo jednak, podczas dostępu do
pamięci zewnętrznej, port P2 pełni rolę bardziej znaczącej części szyny adresowej (A8-
A15). Wtedy przy pomocy linii S=1 (sterowanie) zostaje przełączony multiplekser i
19
sterowanie tranzystora wyjściowego pochodzi z wewnętrznej linii adresu. Zawartość
przerzutnika D nie jest niszczona i jego zapisany w nim stan pojawia się na wyjściu portu
po zakończeniu cyklu dostępu o pamięci.
W przypadku realizacji dostępu do zewnętrznej pamięci danych przy użyciu rejestrów
indeksowych R0 i R1 mikroprocesor ustawia tylko młodsze osiem bitów adresu, a stan
portu P2 nie zmienia się. Linie portu P2 można obciążać czterema wejściami TTL-LS.
Struktura portu P3.
W porcie P3 wszystkie linie pełnią dodatkowe funkcje, jednak w podstawowym trybie
pracy jako wejście/wyjście działanie portu P3 nie różni się w niczym od działania portów
P1 i P2.W zależności od tego czy realizowana funkcja dodatkowa jest
{kind=link}
(TxD, RD',
WR') czy
{kind=link}
(pozostałe oprócz RxD) lub pełni
{kind=link}
(RxD), różna jest
struktura linii portu. Wykorzystanie dodatkowej funkcji linii jest możliwe jedynie po
zapisaniu jedynki do przerzutnika D. W przypadku wyjść (P3.1/TxD', P3.6/WR', P3.7/RD')
tranzystor T sterowany jest odpowiednim sygnałem wewnętrznym realizującym daną
funkcję. Dla realizacji funkcji będącej wyjściem stan wyprowadzenia zewnętrznego
podawany jest za pośrednictwem stale otwartego bufora na wewnętrzną linię
mikrokontrolera. Linie portu P3 można obciążać czterema wejściami TTL-LS.
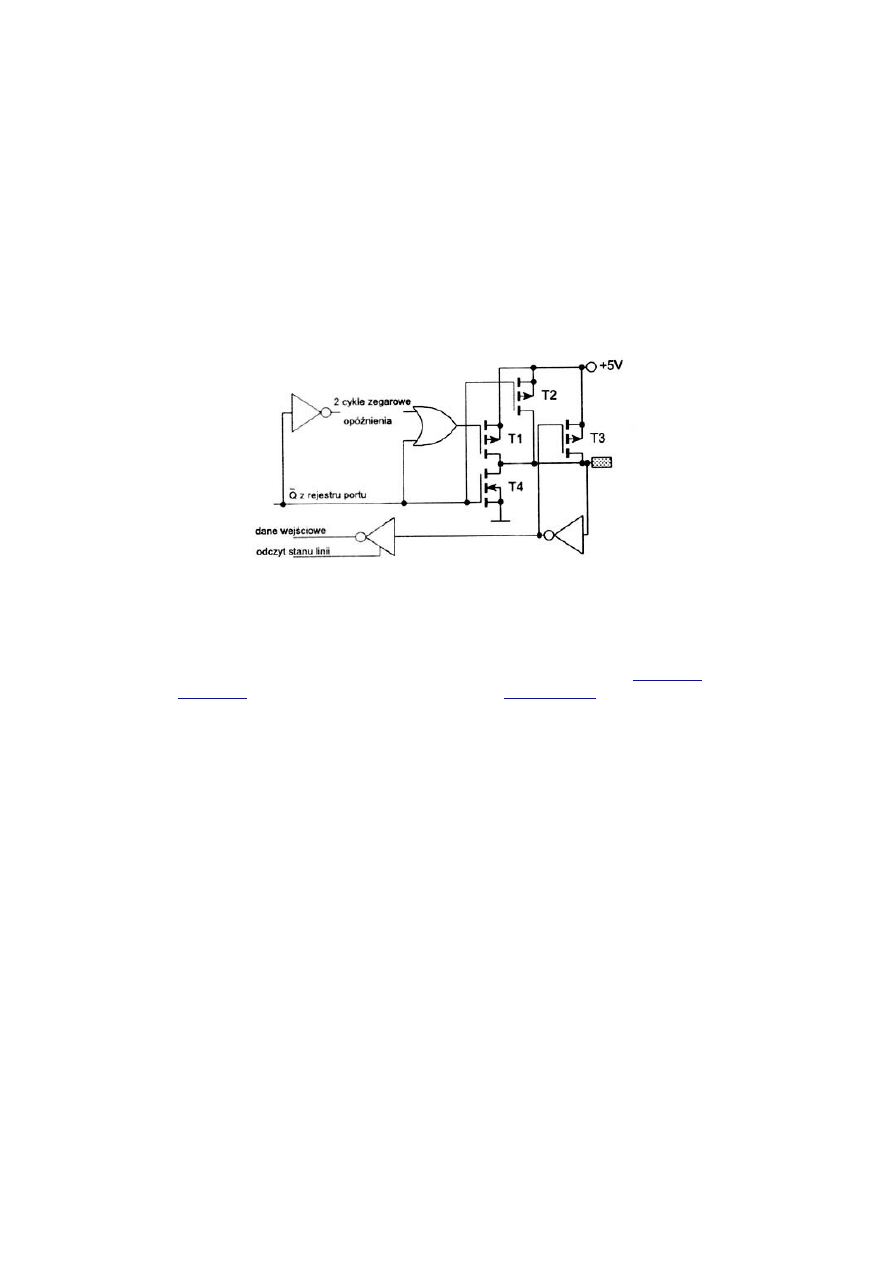
Tranzystor symbolizujący stopień wyjściowy linii portów jest w rzeczywistości bardziej
skomplikowaną strukturą, której schemat przedstawia rysunek.
Zapis do przerzutnika następuje w ostatniej fazie cyklu maszynowego, a wpisana wartość
pojawia się na wyjściu linii portu w pierwszej fazie następnego cyklu maszynowego -
wyjściowy bufor linii portu sprawdza stan przerzutnika tylko podczas pierwszej fazy
każdego cyklu zegarowego, a wykryty stan utrzymuje przez czas trwania drugiej fazy.
Zmiana zawartości przerzutnika ze stanu niskiego na wysoki powoduje włączenie
tranzystora T1, który pozostaje aktywny przez dwa cykle zegarowe. Tranzystor ten ma
dużą wydajność prądową, spełnia rolę rezystora podciągającego o małej wartości
rezystancji, a jego włączenie ma na celu przyspieszenie przejścia ze stanu logicznego 0
do 1. Wpisanie do przerzutnika "1" powoduje dodatkowo włączenie T2, który jest
włączony do momentu zmiany zawartości przerzutnika na "0". T2 stanowi rezystor
podciągający o dużej wartości rezystancji i ma za zadanie utrzymanie linii w stanie
wysokim. Włączenie T1 powoduje również włączenie T3, który również stanowi rezystor
podciągający o dużej rezystancji. T3 jest jednak aktywny tylko wtedy, gdy napięcie na
linii portu jest wyższe niż 1-1.5V. Jeżeli zostanie na linii portu wymuszony stan niski, to
T3 jest wyłączony i jako jedyne obciążenie pozostaje tranzystor T2, co wpływa korzystnie
20

na zmniejszenie strat mocy w układzie. Jeżeli zaś linia pracuje jako wyjście, to
równoczesna praca T2 i T3 powoduje zwiększenie wydajności prądowej wyjścia. Jeżeli do
przerzutnika zostaje wpisane "0" to aktywny jest tylko tranzystor T4.
21

Układy licznikowe mikrokontrolera 8051
Mikrokontroler 8051 wyposażony jest w dwa układy licznikowe T0 i T1.Każdy z tych
liczników składa się z dwóch ośmiobitowych połówek. Połówki te są widziane przez
mikroprocesor jako
TH0 i TL0 dla układu T0 oraz TH1 i TL1 dla układu
T1. Każdy z obu liczników może pracować jako licznik (zlicza wówczas impulsy
zewnętrzne) lub jako czasomierz (zlicza cykle maszynowe mikrokontrolera). Układy
licznikowe mogą pracować w trybach 0, 1, 2 i 3. Wybór trybu pracy i sterowanie
zliczaniem odbywa się za pośrednictwem
: TCON i TMOD:
Rejestr:
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
TCON
TF1
TR1
TF0
TR0
IE1
IT1
IE0
IT0
TMOD
GATE
C/T'
M1
M0
GATE
C/T'
M1
M0
Rejestry sterujące pracą układów licznikowych.
Znaczenie poszczególnych bitów jest następujące:
Rejestr TCON:
•
TF1 - wskaźnik przerwania od licznika T1. Bit ustawiany sprzętowo wskutek
przepełnienia licznika T1, zerowany sprzętowo w chwili rozpoczęcia wykonywania
procedury obsługi przerwania. Możliwe programowe wywołanie przerwania.
•
TR1 - bit włączający (TR1=1) układ licznikowy T1.
•
TF0 - wskaźnik przerwania od licznika T0. Bit ustawiany sprzętowo wskutek
przepełnienia licznika T0, zerowany sprzętowo w chwili rozpoczęcia wykonywania
procedury obsługi przerwania.Możliwe programowe wywołanie przerwania.
•
TR0 - bit włączający (TR0=1) układ licznikowy T0.
•
IE1 - wskaźnik przerwania zewnętrznego INT1'. Ustawiany sprzętowo w wyniku
wykrycia opadającego zbocza (lub niskiego poziomu w zależności od trybu pracy)
na wyprowadzeniu INT1' mikrokontrolera. Zerowany sprzętowo w wyniku
rozpoczęcia wykonywania procedury obsługi przerwania (tylko jeśli przerwanie
jest aktywowane zboczem).Jeśli przerwanie jest aktywowane poziomem, to stan
bitu odpowiada stanowi na wyprowadzeniu INT1' mikrokontrolera.
•
IT1 - bit określający stan wyprowadzenia INT1' aktywujący przerwanie: 0 -
przerwanie aktywowane niskim poziomem, 1 - przerwanie aktywowane
opadającym zboczem.
•
IE0 - jak IE1, dotyczy wyprowadzenia INT0'.
•
IT0 - jak IT1, dotyczy wyprowadzenia INT0'.
Rejestr TMOD:
Rejestr jest podzielony na dwie 4-bitowe części zawierające bity o jednakowym
znaczeniu. Cztery starsze bity rejestru tyczą się układu licznikowego T1, młodsze cztery
bity dotyczą układu T0.
•
GATE - bit sterujący bramkowaniem licznika. Dla GATE=1 zliczanie następuje,
gdy sygnał INTn' i bit TRn odpowiadające danemu licznikowi są w stanie wysokim.
Jeżeli GATE=0, to zliczanie następuje, gdy bit TRn danego licznika jest ustawiony.
•
C/T' - bit określający źródło zliczanych impulsów przez dany układ licznikowy: "0"
oznacza zliczanie cykli maszynowych (impulsów o częstotliwości F
xtal
/12), "1"
oznacza zliczanie impulsów zewnętrznych (z wyprowadzenia Tn odpowiadającego
danemu licznikowi).
22
•
M1, M0 - bity wyboru trybu pracy dla danego układu licznikowego:
M1
M0
Tryb pracy:
0
0
Tryb 0
0
1
Tryb 1
1
0
Tryb 2
1
1
Układ T0 - tryb 3, układ T1 zatrzymany
Znaczenie bitów M1 i M0 rejestru TMOD.
Przy pracy liczników w trybie czasomierza inkrementacja licznika następuje w każdym
kolejnym cyklu maszynowym. W przypadku wykorzystywania układu w trybie licznika,
jego zawartość jest zwiększana w odpowiedzi na opadające zbocze sygnału wejściowego.
Detekcja zbocza odbywa się jednak synchronicznie z cyklem pracy mikrokontrolera przez
testowanie stanu odpowiedniej linii wejściowej w każdym cyklu maszynowym. Jeżeli w
pierwszym cyklu wykryto stan wysoki, a w następnym stan niski, to następuje
zwiększenie zawartości licznika. Aby każde zbocze opadające zostało wykryte, to każdy
stan na linii wejściowej nie może trwać krócej niż czas trwania jednego cyklu
maszynowego, zatem maksymalna częstotliwość sygnału o wypełnieniu 50% jest
ograniczona do wartości 1/24 F
xtal
.
Tryby pracy układów licznikowych mikrokontrolera 8051 posiadają następujące
właściwości:
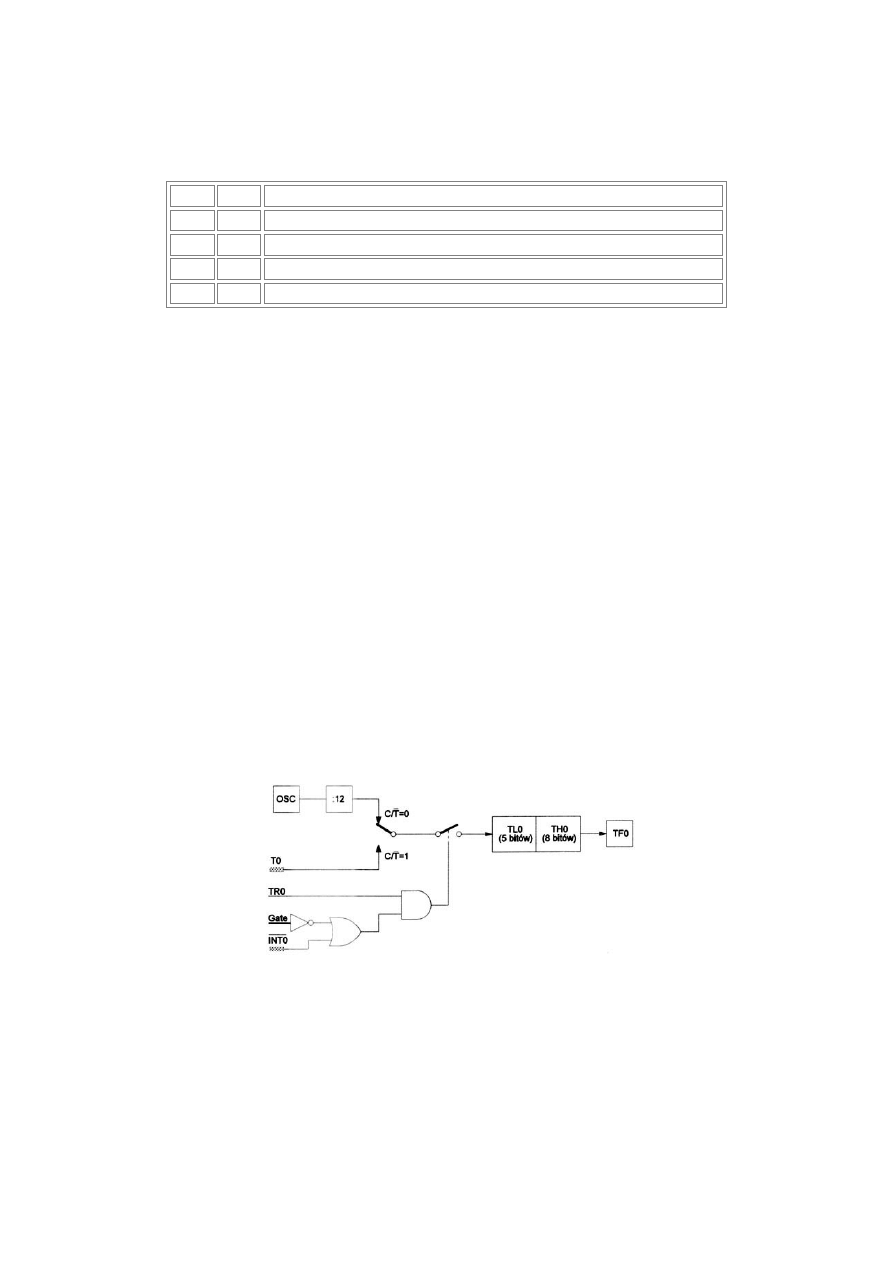
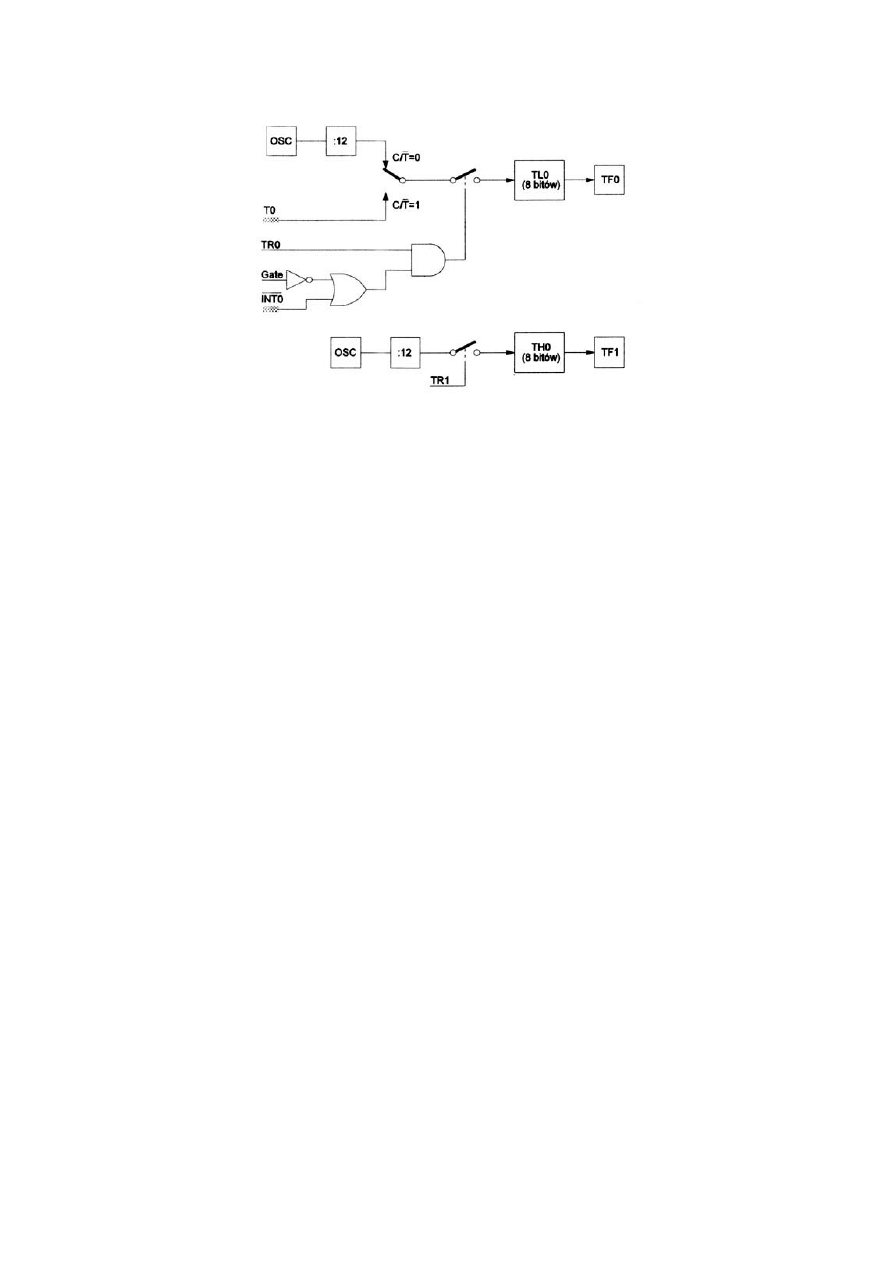
Tryb 0.
Tryb pracy 0 jest identyczny dla obu liczników. Na rysunku przedstawiono strukturę
logiczną licznika T0 pracującego w ;trybie 0 (analogiczna jest struktura licznika T1 w
trybie 0).
Stan licznika jest określony zawartością odpowiedniego rejestru THn oraz pięciu
młodszych bitów rejestru TLn. Przepełnienie tego 13-bitowego licznika spowoduje
ustawienie odpowiedniego bitu przerwania TFn. Przebieg zliczania i źródło impulsów są
określane za pomocą odpowiednich ustawień bitów sterujących pracą liczników (TCON,
TMOD).
23
Tryb 1.
Tryb 1 jest identyczny dla obu liczników. Strukturę licznika T0 pracującego w trybie 1
przedstawiono na rysunku. Tryb pracy 1 pod względem logicznym jest identyczny z
trybem 0. Różnica polega na długości licznika: w trybie 1 zliczanie następuje w 16-
bitowym liczniku złożonym z rejestrów TLn i THn odpowiedniego układu licznikowego.
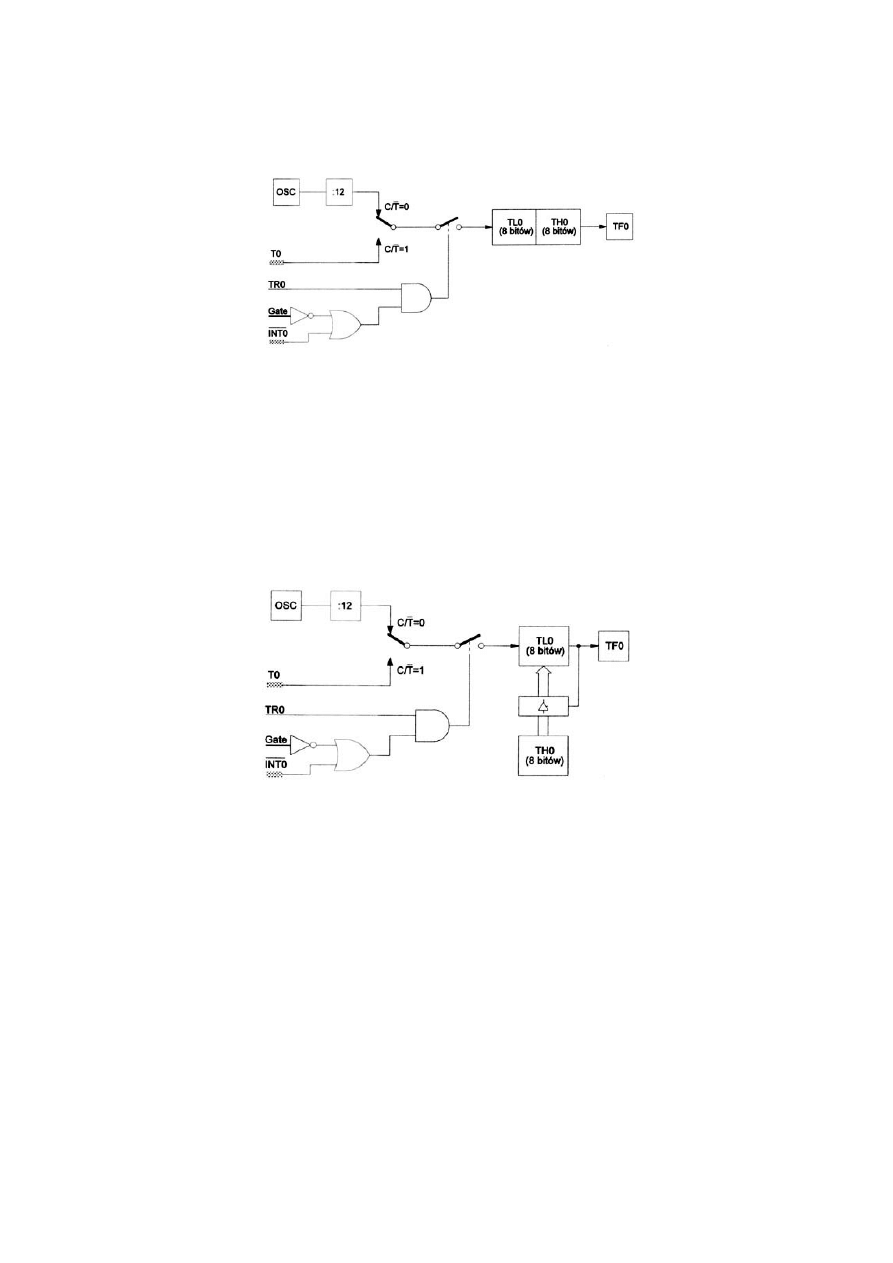
Tryb 2.
Tryb 2 jest identyczny dla obu liczników. Strukturę licznika T0 pracującego w trybie 2
przedstawiono na rysunku. W trybie 2 liczniki pracują jako 8-bitowe z automatycznym
przeładowywaniem. Przepełnienie licznika TLn nie tylko ustawia odpowiedni znacznik
przerwania TFn, lecz również powoduje przepisanie zawartości THn do odpowiedniego
rejestru TLn. Nie powoduje to zmiany zawartości rejestru THn.
Tryb 3.
Tryb 3 jest jedynym trybem różnym dla układów T1 i T0. Schemat logiczny układu
licznikowego T0 pracującego w trybie 3 przedstawiono na rysunku.
24
W trybie 3 może pracować tylko układ T0. Wprowadzenie układu T1 w tryb 3 powoduje
jego zatrzymanie. Układ T0 w trybie 3 stanowi dwa niezależne liczniki 8-bitowe,
utworzone z rejestrów TL0 i TH0. Rejestr TL0 pracuje w układzie identycznym jak w
trybach 0 i 1, z tą różnicą, że zliczanie następuje w liczniku 8-bitowym. Rejestr TH0
pracuje również jako licznik 8-bitowy, może on jednak zliczać wyłącznie impulsy o czasie
trwania cykli maszynowych mikrokontrolera. Do sterowania zliczania TH0 wykorzystano
bity sterujące TR1 i TF1 układu czasowego T1. Wprowadzenie układu T0 w tryb 3
ogranicza zatem wykorzystanie układu T1 do zastosowań nie wymagających
wykorzystania przerwania (wyłączenie licznika T1 następuje w wyniku wprowadzenia go
w jego własny tryb 3) i wówczas układ T1 jest najczęściej wykorzystywany do generacji
sygnału taktującego dla układu transmisji szeregowej.
25
Układ transmisji szeregowej mikrokontrolera 8051
Łącze szeregowe mikrokontrolera 8051 umożliwia prowadzenie synchronicznej lub
asynchronicznej transmisji danych. Transmisja asynchroniczna jest transmisją full-
duplex, natomiast synchroniczna jest transmisją half-duplex. Układ odbiornika posiada
bufor odbiorczy, co pozwala na realizację procesu odbierania kolejnej danej przed
pobraniem przez mikroprocesor danej już odebranej. Jest to jednak bufor jednobajtowy,
więc nie odczytanie danej przez mikroprocesor przed końcem kolejnej transmisji
powoduje utratę odebranego wcześniej bajtu.
Podczas realizacji transmisji asynchronicznej nadawane dane wysyłane są linią TxD, zaś
odbierane przez linię RxD. Podczas transmisji synchronicznej dane są odbierane i
nadawane po linii RxD, a na linię TxD wysyłany jest sygnał taktujący.
Do konfiguracji pracy układu transmisji szeregowej służy rejestr SCON z
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
SM0
SM1
SM2
REN
TB8
RB8
TI
RI
Rozmieszczenie bitów rejestru SCON.
•
SM0, SM1 określają tryb pracy układu transmisji szeregowej:
SM1
SM0
Tryb pracy układu:
0
0
Tryb 0, transmisja synchroniczna
0
1
Tryb 1, transmisja asynchroniczna
1
0
Tryb 2, transmisja asynchroniczna
1
1
Tryb 3, transmisja asynchroniczna
Konfiguracja trybów pracy układu transmisji szeregowej.
•
SM2 steruje przejściem w tryb komunikacji wieloprocesorowej. Dla transmisji
synchronicznej zalecane SM2=0, dla transmisji asynchronicznej SM2=1 powoduje
ustawienie wskaźnika przerwania RI tylko wtedy, jeżeli bit stopu (transmisja 8-
bitowa) lub dziewiąty bit (transmisja 9-bitowa) jest równy jeden.
•
REN - bit włączający odbiornik: 1 - włączenie, 0 - wyłączenie.
•
TB8 - dziewiąty bit danych nadawanych podczas transmisji dziewięciobitowej.
•
RB8 - dziewiąty bit odebranej danej podczas transmisji dziewięciobitowej.
•
TI - wskaźnik przerwania nadajnika. Informuje o zakończeniu transmisji danej i
gotowości nadajnika do przesyłania następnej. Bit musi być zerowany
programowo przez procedurę obsługi przerwania.
•
RI - wskaźnik przerwania odbiornika. Informuje o prawidłowym odbiorze danej i
jej gotowości do pobrania przez mikroprocesor. Bit musi być zerowany
programowo przez procedurę obsługi przerwania.
26

Tryb 0.
Tryb 0 posiada następujące cechy:
•
transmisja synchroniczna,
•
prędkość transmisji stała i równa 1/12 F
xtal
,
•
przesyłane 8 bitów danych.
Nadawanie danych następuje wnastępnym cyklu maszynowym po wpisaniu danej przez
mikroprocesor do rejestru SBUF. Dane nadawane są po linii RxD począwszy od najmniej
znaczącego bitu. Jednocześnie na linii TxD pojawiają się impulsy taktujące. Po nadaniu
ośmiu bitów linie RxD i TxD powracają do stanu "1" i ustawiany jest bit TI.
Odbiór informacji rozpoczyna się poprzez ustawienie bitu REN=1 i RI=0. W następnym
cyklu maszynowym podany zostaje sygnał taktujący na linię TxD i następuje odczyt
informacji bit po bicie (począwszy od najmniej znaczącego). Po odebraniu ośmiu bitów,
cała odebrana informacja przepisywana jest do rejestru SBUF i ustawiany jest wskaźnik
przerwania RI.
Tryb 1.
Tryb 1 posiada następujące cechy:
•
transmisja asynchroniczna,
•
płynnie regulowana prędkość transmisji,
•
przesyłany jest bit startu równy "0", osiem bitów danych (od LSB), bit stopu
równy "1",
Sygnałem taktującym transmisji są impulsy przepełnienia licznika T1 układu czasowego.
Na szybkość transmisji ma również wpływ stan bitu SMOD rejestru PCON. Wyzerowanie
bitu SMOD powoduje dwukrotne zmniejszenie prędkości transmisji. Szybkość transmisji
możemy określić według wzoru V=(2
SMOD
*F przepełniania T1)/32. Licznik T1 może
pracować w dowolnym z trybów, jednak należy pamiętać o jego cyklicznym
przeładowywaniu w razie konieczności. Często stosuje się tutaj tryb 2 licznika T1 (z
automatycznym przeładowywaniem - odpada konieczność programowego
przeładowywania licznika), wtedy wzór na prędkość transmisji ma następującą postać:
V=(F
xtal
*2
SMOD
)/(32*12*(256-TH1)).
Transmisję rozpoczyna zapis bajtu do rejestru SBUF. Wówczas w takt impulsów o
częstotliwości F
przepełnienia T1
/16 rozpoczyna się wysyłanie po linii TxD: bitu startu ("0"), 8
bitów danych, bitu stopu ("1"). Po wysłaniu bitu stopu ustawiony zostaje wskaźnik
przerwania TI i linia TxD jest ustawiona w stan "1".
Jeżeli odbiornik jest włączony (REN=1), to bada on cały czas stan na wejściu RxD. Jeżeli
wykryje opadające zbocze, to traktuje je jako początek bitu startu i następnie dokonuje
kolejnego próbkowania w połowie czasu trwania bitu startu (według ustalonej prędkości
transmisji) i jeżeli na linii RxD nadal panuje stan niski, to oznacza to, że został odebrany
bit startu i następnie linia RxD jest próbkowana w połowie czasu trwania każdego bitu
danych. Sposób zakończenia odbioru zależy od bitów RI i SM2 oraz od wartości
odebranego bitu stopu:
27

•
Jeżeli RI=1 to cały odebrany bajt jest ignorowany i odbiornik rozpoczyna na nowo
nasłuchiwanie linii RxD.
•
Jeżeli RI=0 i bit stopu ma wartość "1", to odbiór kończy się w sposób poprawny,
czyli następuje wówczas przepisanie odebranego bajtu do rejestru SBUF, wartość
bitu stopu jest zapisywana do bitu RB8 i następuje ustawienie wskaźnika
przerwania RI.
•
Jeżeli RI=0 i bit stopu ma wartość "0", a SM2=1, to odebrany bajt jest
ignorowany. Jeżeli zaś SM2=0, to odbiór kończy się w sposób poprawny.
Sterowanie bitem SM2 umożliwia sprzętowe odrzucanie bajtów odebranych z
błędem ramki.
Tryb 2.
Tryb 2 posiada następujące cechy:
•
transmisja asynchroniczna,
•
dwie, zależne od częstotliwości taktowania mikrokontrolera, prędkości transmisji,
•
przesyłany jest bit startu równy "0", dziewięć bitów danych, bit stopu równy "1".
W trybie pracy możliwe są do uzyskania dwie prędkości transmisji - która z nich zostanie
wybrana zależy od wartości bitu SMOD rejestru PCON. Prędkość można wyznaczyć z
zależności: V=F
xtal
*2
SMOD
/64.
Transmisja danych w trybie 2 zachodzi identycznie jak w trybie 1, z tym, że jest
transmitowany dziewiąty bit danych zapisany w bicie TB8, a odbierany dziewiąty bit jest
zapisywany w bicie RB8. Warunki poprawnego odebrania informacji są identyczne jak w
trybie 1, z tym, że pod uwagę bierze się tu dziewiąty bit danych, a nie bit stopu (w trybie
2 bit stopu nie wpływa na proces odbioru).
Transmitowany i odbierany dziewiąty bit może zostać wykorzystany do przesyłania bitu
kontroli parzystości.
Tryb 3.
Tryb 3 posiada następujące cechy:
•
transmisja asynchroniczna,
•
płynnie regulowana prędkość transmisji,
•
przesyłany jest bit startu równy "0", dziewięć bitów danych, bit stopu równy "1".
Tryb 3 stanowi połączenie właściwości trybów 1 i 2. W trybie tym układ transmisji
szeregowej jest taktowany sygnałem przepełnienia licznika T1, tak samo określa się
również prędkość transmisji. Logiczne cechy transmisji są identyczne jak w trybie 2.
28
Układ przerwań mikrokontrolera 8051
Mikrokontroler 8051 jest wyposażony w priorytetowy, dwupoziomowy układ przerwań.
Układ przerwań jest specjalizowaną strukturą logiczną, której zadaniem jest
monitorowanie stanu wskaźników przerwań i zgłaszanie faktu ustawienia określonego
wskaźnika do układu sterowania. W mikrokontrolerze 8051 przerwanie może zostać
wywołane przez jedno z pięciu wskaźników. Cztery ze wskaźników umieszczone są w
rejestrze TCON:
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
TF1
TR1
TF0
TR0
IE1
IT1
IE0
IT0
Bity rejestru TCON.
Znaczenie poszczególnych bitów jest następujące:
•
TF1 - wskaźnik przerwania od licznika
•
TF0 - wskaźnik przerwania od licznika
•
TR1, TR0 - sterowanie licznikami T1 i T0 (nie istotne dla układu przerwań).
•
IE1 - wskaźnik przerwania zewnętrznego INT1'.
•
IE0 - wskaźnik przerwania zewnętrznego INT0'.
•
IT0, IT1 - sposób zgłaszania odpowiednich przerwań zewnętrznych: 0 -
zgłaszanie niskim poziomem napięcia, 1 - zgłaszanie zboczem opadającym.
Piątym źródłem przerwania jest
. Przerwanie to jest zgłaszane
przez ustawienie dowolnego z bitów RI lub TI rejestru SCON.
W przypadku przerwań zewnętrznych i od układów czasowych, wskaźniki przerwania są
sprzętowo zerowane po przyjęciu zgłoszenia przerwania (za wyjątkiem sytuacji, gdy
przerwanie zewnętrzne jest zgłaszane niskim poziomem). Wskaźniki przerwania z układu
transmisji szeregowej muszą być zerowane programowo przez procedurę obsługi
przerwania, gdyż sprzętowe zerowanie uniemożliwiłoby określenie, który ze wskaźników
(RI czy TI) przerwanie wywołał.
Do uaktywniania poszczególnych przerwań i określania ich priorytetów przeznaczone są
rejestry sterujące IE i IP.
Rejestr
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
IE
EA
-
-
ES
ET1
EX1
ET0
EX0
IP
-
-
-
PS
PT1
PX1
PT0
PX0
Rejestry sterujące układu przerwań.
Znaczenie bitów rejestru IE:
•
EA - ustawienie bitu włącza układ przerwań, wyzerowanie wyłącza układ przerwań
(blokuje wszystkie przerwania).
•
ES - ustawienie bitu powoduje włączenie obsługi przerwania z układu transmisji
szeregowej.
•
ET1, ET0 - ustawienie bitów powoduje włączenie obsługi przerwań z
odpowiednich liczników (T1 i T0).
29

•
EX1, EX0 - ustawienie bitów powoduje włączenie obsługi odpowiednich przerwań
zewnętrznych.
Rejestr IP służy do określenia poziomu poszczególnych przerwań. "0" lub "1" na
poszczególnych pozycjach przyporządkowują dane przerwanie do poziomu odpowiednio 0
lub 1.
•
PS - ustalanie poziomu priorytetu przerwania z układu transmisji szeregowej.
•
PT1, PT0 - poziomy priorytetów przerwań z odpowiednich liczników.
•
PX1, PX0 - poziomy priorytetów odpowiednich przerwań zewnętrznych.
Podczas realizacji procedury obsługi przerwania poziomu 0 może nastąpić jej przerwanie
przez procedurę obsługi przerwania o poziomie 1 - nie może jednak wystąpić sytuacja
odwrotna. Nie może również wystąpić wzajemne przerywanie procedur obsługi przerwań
z tego samego poziomu.
Dodatkowo podczas realizacji programu może wystąpić jednoczesne zgłoszenie dwóch lub
więcej przerwań o tym samym poziomie. Powoduje to wybranie do wykonania przez
układ przerwań obsługi przerwania o najwyższym priorytecie według kolejności: INT0'
(priorytet najwyższy), TF0, INT1', TF1, RI+TI (priorytet najniższy).
Przyjęcie przerwania powoduje sprzętową generacje rozkazu LCALL z adresem procedury
obsługi przerwania, właściwym dla każdego przerwania (patrz "
Przyjęcie przerwania jest możliwe jednak tylko wtedy, gdy obecnie nie jest wykonywane
przerwanie o równym lub wyższym priorytecie, trwa aktualne wykonywanie jakiegoś
rozkazu (układ obsługi przerwania musi poczekać do zakończenia wykonywania tego
rozkazu) lub jeżeli jest wykonywany adres powrotu z procedury obsługi przerwania RETI,
rozkaz dostępu do rejestrów IE i IP, lub jakikolwiek rozkaz po nich wykonywany.
Generator sygnału taktującego
30
Mikrokontroler 8051 posiada wbudowany generator sygnału zegarowego, mogący
współpracować z rezonatorem kwarcowym lub ceramicznym. Generator wytwarza sygnał
taktujący mikrokontroler o częstotliwości równej częstotliwości zastosowanego rezonatora
(układ powoduje wzbudzenie rezonatora na częstotliwości podstawowej).
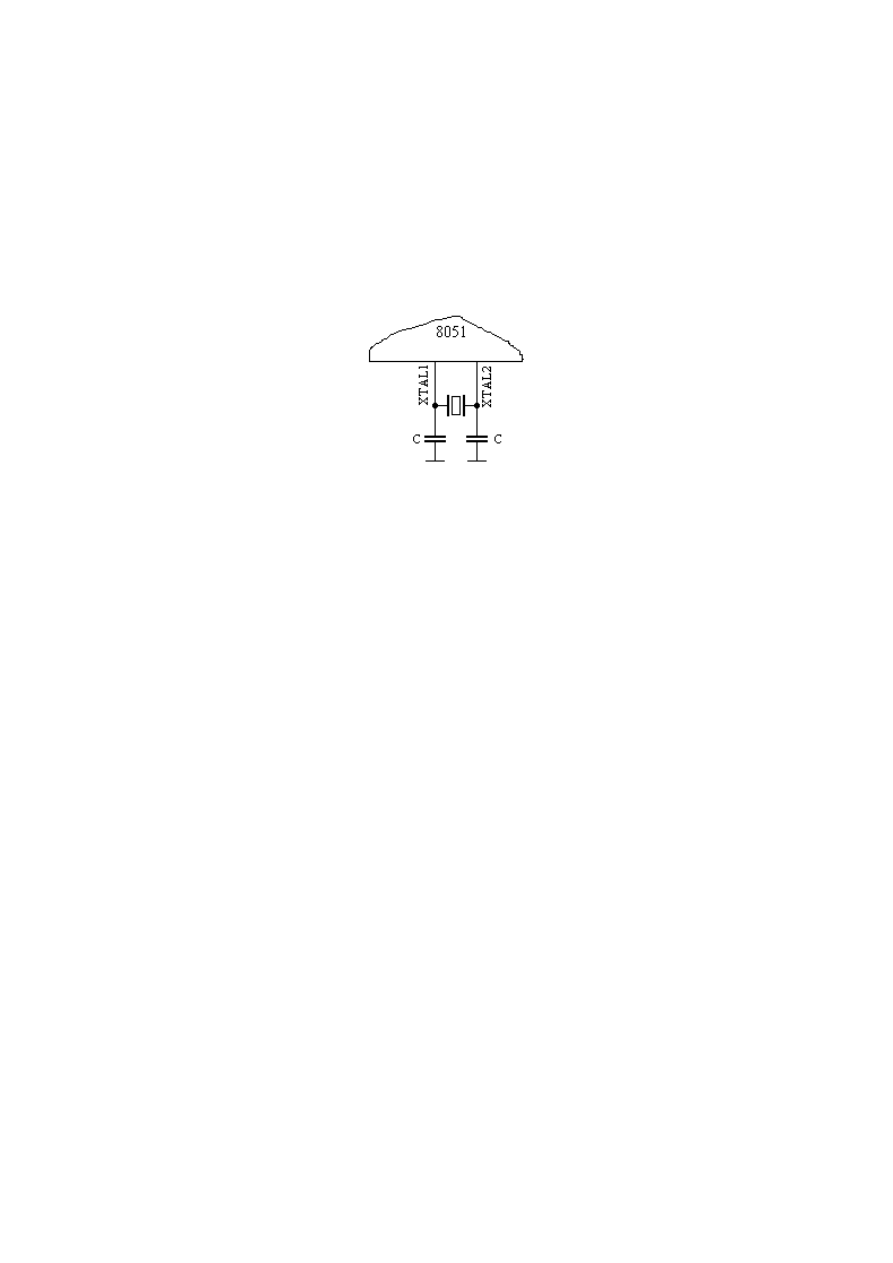
Przygotowanie generatora (a zarazem całego mikrokontrolera) do pracy polega na
dołączeniu do wyprowadzeń XTAL1 i XTAL2 rezonatora (kwarcowego lub ceramicznego)
oraz dwóch kondensatorów według poniższego schematu:
Wartość pojemności kondensatorów nie jest zbyt istotna: dla rezonatora kwarcowego
producent zaleca wartości w granicach 20-40pF, dla rezonatora ceramicznego 45-60pF.
Możliwe jest również taktowanie mikrokontrolera sygnałem z zewnętrznego generatora.
Częstotliwość sygnału powinna zawierać się w przedziale zalecanym przez producenta
(dla układu 8051 w granicach 1.2-12MHz), a wypełnienie powinno być równe 50% (choć
niektórzy producenci dopuszczają taktowanie sygnałem o innym wypełnieniu). Sposób
podłączenia generatora do mikrokontrolera jest różny w zależności od technologii
wykonania układu. Dla mikrokontrolerów wykonanych w technologii NMOS sygnał z
generatora należy podłączyć do wyprowadzenia XTAL2, a wyprowadzenie XTAL1
połączyć z masą układu. W przypadku mikrokontrolerów wykonanych w technologii CMOS
(z literą C w nazwie, np. 80C51) sygnał generatora podłącza się do wyprowadzenia
XTAL1, natomiast wyprowadzenie XTAL2 pozostawia się nie podłączone. Producenci
mikrokontrolerów stawiają również wymagania co do parametrów elektrycznych sygnału
taktującego. Najczęściej od sygnału generatora oczekuje się następujących parametrów:
w stanie niskim napięcie nie powinno przekraczać 0.75V, natomiast w stanie wysokim nie
powinno być niższe niż 2.5V w przypadku układów NMOS lub 3.5V w przypadku
mikrokontrolerów CMOS.
Powyższe cechy generatora taktującego będącego na wyposażeniu mikrokontrolera 8051
są w większości przypadków identyczne dla innych mikrokontrolerów rodziny '51 (także
dla układu 80C552). Zazwyczaj najbardziej znaczącą różnicą jest maksymalna
częstotliwość rezonatora (zewnętrznego generatora) taktującego mikrokontroler. Dla
układu 80C552 maksymalna częstotliwość taktująca wynosi 20MHz (dla niektórych wersji
30MHz).
Układ sterowania mikrokontrolerów '51
31
Najważniejszym zadaniem układu sterowania jest dekodowanie przesłanego z pamięci
programu rozkazu i generacja na jego podstawie odpowiednich sygnałów sterujących
pozostałymi elementami mikrokontrolera. Z układem sterowania współpracuje licznik
rozkazów PC (16-bitowy rejestr zawierający adres kolejnego rozkazu przeznaczonego do
wykonania) i rejestr rozkazów (rejestr przechowujący ostatnio pobrany rozkaz).
Współpracuje z nim także układ przerwań (układ sterowania jest odpowiedzialny za
sprzętową generację rozkazu LCALL wywołania procedury obsługi przerwania).
Układ sterowania jest odpowiedzialny za generację następujących sygnałów
zewnętrznych:
•
PSEN' - strob odczytu z zewnętrznej pamięci programu.
•
RD' - strob odczytu z zewnętrznej pamięci danych.
•
WR' - strob zapisu do zewnętrznej pamięci danych.
•
ALE - sygnał sterujący buforem zatrzaskującym młodszy bajt adresu pamięci
zewnętrznej.
Do układu sterowania są natomiast doprowadzone następujące sygnały zewnętrzne:
•
EA' - linia wyłączająca wewnętrzną pamięć programu.
•
RST - linia zerowania mikrokontrolera.
Ponieważ po dołączeniu zasilania do mikrokontrolera jego rejestry i układy mogą
przyjmować trudne do przewidzenia stany, natychmiast po włączeniu zasilania powinien
zostać wygenerowany sygnał zerujący. Prawidłowe wyzerowanie mikrokontrolera polega
na podaniu na wyprowadzenie RST stanu "1" przez co najmniej 2 cykle maszynowe.
Podczas włączania zasilania poziom wysoki powinien być utrzymywany dłużej (ok. 10-
20ms) w związku z koniecznością wzbudzenia się wewnętrznego generatora, a czynność
tą wykonuje poniższy układ:
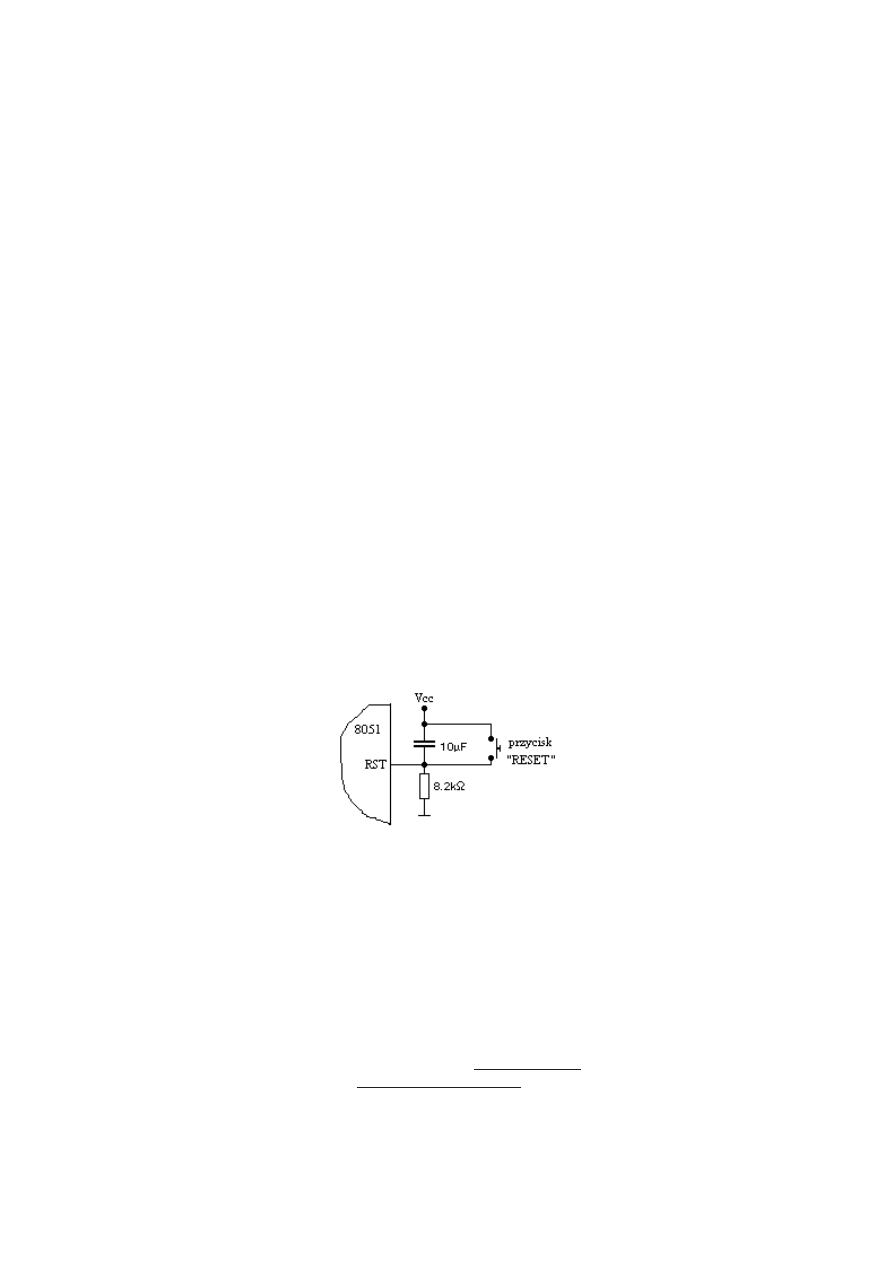
Po włączeniu zasilania układu, poziom wysoki utrzymuje się na wyprowadzeniu RST przez
czas ładowania kondensatora. Stała czasowa obwodu RC z zapasem zapewnia konieczny
czas występowania poziomu wysokiego na wyprowadzeniu. Podczas normalnej pracy
możliwe jest wyzerowanie mikrokontrolera przez naciśnięcie przycisku RESET, co
spowoduje doprowadzenia poziomu wysokiego do wyprowadzenia RST i rozładowanie
kondensatora. Po zwolnieniu przycisku poziom wysoki na wyprowadzeniu RST utrzyma
się do czasu naładowania kondensatora (podobnie jak przy włączeniu zasilania). Sygnał
RESET powoduje inicjację wszystkich zasobów mikrokontrolera:
•
ustawienie zawartości wskaźnika stosu SP=7.
•
ustawienie jedynek na wszystkich liniach
•
(jedynie SBUF przyjmuje
nieokreśloną zawartość).
•
zawartość pamięci danych pozostaje nie zmieniona (po włączeniu zasilania jest
nieokreślona).
32
Układ sterowania mikrokontrolera wykonanego w technologii CMOS (80C51) steruje
również trybami oszczędzania energii. Od strony programowej ustawienie określonego
trybu odbywa się za pośrednictwem rejestru PCON:
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 0
SMOD
-
-
-
GF1
GF0
PD
IDL
Bity rejestru PCON mikrokontrolera 80C51
•
SMOD - odpowiedzialny za określenie prędkości transmisji przez
•
GF1, GF0 - bity ogólnego przeznaczenia.
•
PD - bit sterujący przejściem mikrokontrolera w stan uśpienia PD (ang. Power
Down); ustawienie powoduje przejście do stanu uśpienia, zerowany jest
sprzętowo przy wyjściu ze stanu uśpienia.
•
IDL - bit sterujący przejściem mikrokontrolera w stan uśpienia IDL (ang. Idle);
ustawienie powoduje przejście do stanu uśpienia, zerowany jest sprzętowo przy
wyjściu ze stanu uśpienia.
Układy wykonane w technologii NMOS posiadają w rejestrze PCON tylko bit SMOD.
Ustawienie bitu IDL powoduje wprowadzenie mikrokontrolera w stan uśpienia IDL.
Następuje wówczas odłączenie wewnętrznego sygnału taktującego od jednostki
centralnej i mikrokontroler nie wykonuje żadnego rozkazu. Zachowany zostaje stan
pamięci wewnętrznej, wszystkich rejestrów specjalnych i linii we/wy. Działa układ
transmisji szeregowej, układ czasowy i układ przerwań. Wyjściowe sygnały ALE i PSEN'
przyjmują poziomy nieaktywne. Wyprowadzenie mikrokontrolera następuje przez
zgłoszenie dowolnego, włączonego przerwania. Następuje wówczas wyzerowanie bitu
IDL, wykonanie programu obsługi przerwania i przejście do wykonywania programu
głównego od miejsca, w którym został ustawiony stan uśpienia.
Ustawienie bitu PD powoduje wprowadzenie mikrokontrolera w stan uśpienia PD.
Następuje wówczas wyłączenie generatora sygnału taktującego i zatrzymanie wszystkich
funkcji mikrokontrolera. Sygnały ALE i PSEN' przyjmują poziomy niskie, a napięcie
zasilające Vcc może być wówczas obniżone do wartości 3V. Zachowana zostaje zawartość
pamięci wewnętrznej, rejestrów specjalnych i linii we/wy. Aby wyprowadzić
mikrokontroler ze stanu uśpienia PD, należy przywrócić normalną wartość napięcia Vcc i
wygenerować sygnał RESET. Stracona wówczas zostaje zawartość rejestrów i linii portów
we/wy.
Jednoczesne ustawienie bitów IDL i PD powoduje wywołanie trybu uśpienia PD.
Mikroprocesory rodziny '51 w stanach uśpienia pobierają około 0.2 do 15% mocy
pobieranej podczas normalnej pracy.
33
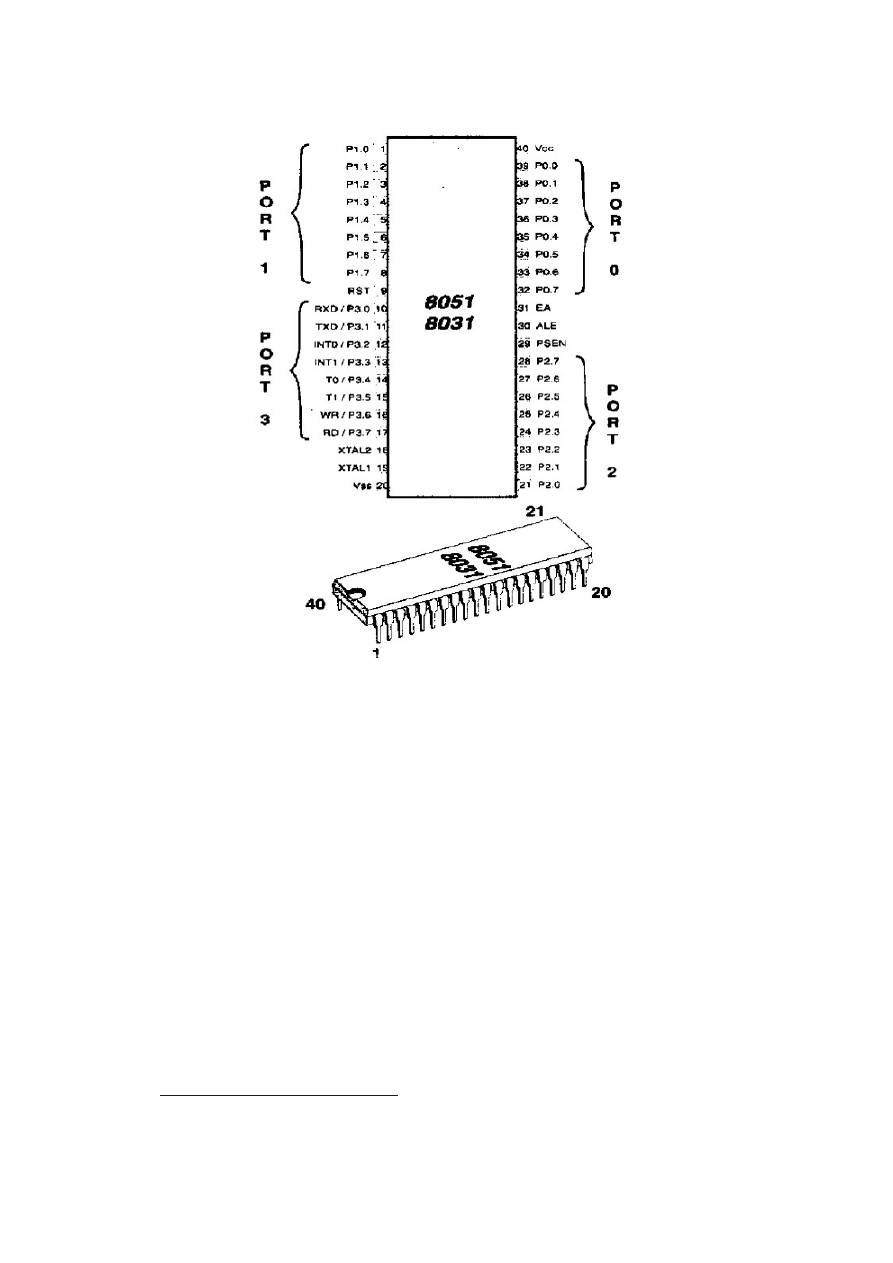
Opis wyprowadzeń mikrokontrolera 8051
Porty są to wyprowadzenia 8-bitowe. Port może pełnić role wyjścia informacji binarnej.
Tak więc, jeżeli zachodzi potrzeba procesor może wpisać do portu dowolną liczbę binarną
z zakresu 0...255, np. 48 (binarnie 48=00110000). Końcówki dowolnego portu procesora
mogą pełnić zarówno rolę wejść jak i wyjść.
•
{kind=link}
1. PORT 1 (P1) to końcówki o numerach 1...8
- Oznaczenia poszczególnych końcówek portu P1 wskazują nam kolejną pozycje bitu.
34

Istotną zaletą portów uniwersalnych procesora (w tym także P1) jest możliwość
indywidualnego ustawiania poziomu logicznego na każdym wyprowadzeniu nie zależnie.
Nie trzeba zatem zapisywać całej liczby do portu aby np. zmienić stan tylko na jednym
wyprowadzeniu, wystarczy ustawić w (rozkazem SETB) lub wyzerować (rozkazem
(CLR)odpowiedni bit rejestru portu P1. Port można ustawić także jako wejście informacji
logicznej. Każde z wyprowadzeń staje się wtedy wyjściem o wysokiej impedancji, dzięki
temu dowolny poziom logiczny podany z wyjścia jakiegoś układu cyfrowego może być
odczytany poprzez piny portu a informacja czy tym stanem była logiczna "1" czy "0"
zostaje wykorzystana przez procesor dla dalszego jego działania w zależności od
spełnianej funkcji. Procesor może odczytać stany logiczne, jakie z zewnątrz podano na
końcówki portu.. poziomy logiczne napięć wejściowych portów muszą zawierać się w
przedziale napięć mikrokontrolera, czyli w zakresie 0...5V. detekcja poziomów logicznych
odbywa się jak dla bramek CMOS, stąd wartości progowe napięć tych stanów są zbliżone
do połowy napięcia zasilającego. W trybie odczytu z portu P1 końcówki są wewnętrznie
podczepiane do plusa zasilania poprzez wbudowane w 80C51 rezystory co wymusza
odczyt wysoki z portu w wypadku nie podłączenia końcówki portu .
2. PORT 3 (P3) to końcówki o numerach 10...17
- podobnie jak w przypadku portu P1, port P3 może być wyjściem lub wejściem..
- pinyP3.0(RXD) i P3.1(TXD) mogą pełnić rolę portu transmisji szeregowej.
W praktyce poprzez te dwa wyprowadzenia można przesłać informację (bajty i bity) z i
do procesora z innych układów cyfrowych w sposób szeregowy, tzn. bit po bicie.
- alternatywną funkcją końcówek P3.2 (INTO\ ) oraz P3.3 (INT1) jest funkcja detekcji
przerwań zewnętrznych. Przerwanie w tym przypadku odnosi się do zmiany stanu
logicznego ( na omawianym wyprowadzeniu P3.2 lub P3.3) z "1" na "0". W efekcie "we
wnętrzu" procesora 8051 została ustawiona tak zwana flaga - znacznik zgłoszenia
przerwania.
- końcówki (P3.4 i P3.5) oznaczone na diagramie z rysunku 2 jako T0 i T1 pełnią
dodatkową funkcję wejść uniwersalnych, programowalnych liczników wbudowanych w
strukturę 8051. Procesor 80C51 zawiera dwa bliźniacze liczniki T0 iT1 maksymalnie mogą
one zliczać do 216= 65536, po czym zostają wyzerowane liczniki. Liczniki te oprócz
zliczania impulsów z wejść T0 i T1 mogą także zliczać impulsy wewnętrzne, pochodzące z
generatora mikrokontrolera. Liczniki mogą być programowane przez użytkownika a więc
można np. zmniejszyć ich pojemność do 28 lub 213 , można także zapisać w nich
wartość początkową lub zatrzymać je w dowolnym momencie lub uruchomić.
- końcówki P3.6 (WR\) i P3.7(RD\) pin WR\ jest sygnałem zapisu do zewnętrznej pamięci
danych , a końcówka RD\ wysyła sygnał do odczytu.. W praktycznych zastosowaniach
jako elementy pamięci wykorzystuje się układy statycznych RAM - czyli w skrócie SRAM.
Procesor potrafi zaadresować maksymalnie 65536 komórek pamięci (bajtów).
3. PORT 2 (P2) to końcówki o numerach 21...28
- są to wyprowadzenia drugiego 8- bitowego portu procesora.
- port P2 spełnia wszystkie funkcje podobnie jak P1.
- dodatkowo przez końcówki portu P2 podawane jest w razie potrzeby starsza część
adresu (A8...A15) przy dostępie do zewnętrznej pamięci danych (SRAM) a także
programu (np. EPROM).
4. PORT 0 (P0) to końcówki o numerach 32...39
- podstawowe funkcje portu jako dwukierunkowej bramy do wymiany danych są takie
35

same jak w przypadku portów P1 i P2
- różnicą jest zwiększona obciążalność tego portu oraz fakt nie posiadania wbudowanych
rezystorów podciągających końcówki portu do plusa zasilania w wypadku odczytu..
Bardzo ważną rolę jaką pełni P0, jest funkcja multipleksowanej magistrali danych i
młodszej części adresu. multipleksowanej w praktyce znaczy przełączalnej czyli raz na
końcówkach portu P0 procesor może wystawić bajt danych np. do zapisu zewnętrznej
pamięci danych, w innym przypadku adres w celu wybrania potrzebnej komórki pamięci
SRAM do której ma być zapisana.
5. Końcówka 9 (RST) czyli reset.
- powoduje skasowanie układu, a więc natychmiastowe przerwanie wykonywanych
czynności i rozpoczęcie cyklu działania procesora od samego początku (od włączenia
zasilania układu). Czas trwania dodatniego impulsu kasującego zależy od częstotliwości z
jaką pracuje mikroprocesor. Z reguły w typowych zastosowaniach czas 1ms zupełnie
wystarczy. W układach praktycznych RST dołączamy układ który generuje wymagany
impuls zerujący. Głównym elementem układu "reset" jest kondensator elektrolityczny
wartość jego wynosi od 10 do 22 F jest on niezbędny do prawidłowej generacji impulsu
resetu przez układy wewnętrzne mikrokontrolera. Widoczny na rysunku klawisz służy do
resetowania procesora bez konieczności wyłączania napięcia zasilającego.
6. Końcówki 18 i 19 (XTAL1 i XTAL2)
- końcówki te służą do łączenia zewnętrznego rezonatora kwarcowego o częstotliwości
zależnej od potrzeb użytkownika, ale także od wersji układu 8051. W praktyce
częstotliwość ta może wynosić od 1,2MHz do 12...16MHz. dołączony do tych pinów
rezonator kwarcowy umożliwia pracę wbudowanemu w 8051 generatorowi, który
"napędza" cały mikroprocesor. Od częstotliwości rezonatora ściśle zależy szybkość
działania mikrokontrolera .
7. Końcówka 20 (Vss)
- końcówka ujemnego napięcia zasilającego - masy (GND)
8. Końcówka 29 (PSEN\)
- w przypadku pracy procesora z zewnętrzną pamięcią programu (np. EPROM) końcówka
ta wysyła sygnał odczytu z tej pamięci. W praktyce jest dołączona do wejścia OE\
współpracującej pamięci EPROM. Procesor chcąc odczytać kolejne rozkazy z zewnętrznej
pamięci programu podaje poziom niski na końcówkę "PSEN" a następnie dokonuje
odczytu .
9. Końcówka 30 (ALE)
- sygnał pojawiający się na tym wyprowadzeniu można nazwać "sygnałem zapisu adresu"
do dodatkowego zewnętrznego układu.
10. Końcówka 31 (EA\)
- powinna być dołączona do masy jeżeli mikroprocesor pobiera rozkazy w zewnętrznej
pamięci programu lub do plusa zasilania (+5V) jeżeli z wewnętrznej. W pewnych
układach procesor pomimo że posiada wewnętrzną pamięć programu , ze względu na
zbyt małą pojemność musi sięgać do zewnętrznej pamięci w takim przypadku pin EA\
powinien być dołączony do plusa zasilania , tak aby procesor po jego "resecie" mógł
rozpocząć pracę pobierając rozkazy z wbudowanej pamięci programu. Dołączenie pinu
EA\ do masy blokuje wewnętrzną pamięć programu.
11. Końcówka 40 (Vcc)
- końcówka zasilania mikroprocesora 8051. Napięcie względem końcówki Vss (czyli
masy) z reguły nie może przekroczyć 6,5V .Dlatego układ mikrokontrolera zasilany jest
napięciem 5V 0,25V.
36
Wyszukiwarka
Podobne podstrony:
Lista rozkazow 8051
lista rozkazow 8051
Lista rozkazow 8051, architektura komputerow, architektura komputerow
8051 lista rozkazow, ELEKTRONIKA I PROGRAMOWANIE, Mikroprocesory, programowanie Bascom, AVR,
lista rozkazów 8051
8051 lista rozkazow
8051 lista rozkazow
lista rozkazów 8051
Lista rozkazow 8051
Lista rozkazów?51
@ Lista rozkazowa
8086 Lista rozkazów, Akademia Morska, III semestr, technika cyfrowa, Technika Cyfrowa, TC - lab Dąbr
!!! Tylko lista rozkazów 51
lista rozkazowh000
8080 lista rozkazów i kodów, Akademia Morska, III semestr, technika cyfrowa, Technika Cyfrowa, TC -
opis 8051
więcej podobnych podstron