
Politechnika Wrocławska
Wydział Informatyki i Zarządzania
Zakład Systemów Informacyjnych
Sebastian Łękawa
Analiza danych w Systemach Informacji
Przestrzennej.
PRACA MAGISTERSKA
Promotor : dr inż. Bogdan Trawiński
Wrocław 2002

2
WSTĘP.......................................................................................................................................... 4
ROZDZIAŁ 1. WPROWADZENIE DO SYSTEMÓW INFORMACJI PRZESTRZENNEJ ..... 7
1.1.
D
EFINICJA
S
YSTEMU
I
NFORMACJI
P
RZESTRZENNEJ
...................................................7
1.2.
H
ISTORIA
SIP .........................................................................................................8
1.3.
E
LEMENTY
S
YSTEMÓW
I
NFORMACJI
P
RZESTRZENNEJ
...............................................9
1.4.
P
OJĘCIA ZWIĄZANE Z INFORMACJĄ PRZESTRZENNĄ
.................................................10
1.4.1. Dane przestrzenne .......................................................................................10
1.4.2. Jakość danych .............................................................................................11
1.4.3. Triangulacja ................................................................................................12
1.5.
K
LASYFIKACJA SYSTEMÓW INFORMACJI PRZESTRZENNEJ
........................................13
1.6.
M
ODELE DANYCH PRZESTRZENNYCH
......................................................................14
1.6.1. Prosty model wektorowy .............................................................................15
1.6.2. Topologiczny model danych wektorowych..................................................16
1.6.3. Model rastrowy ...........................................................................................17
1.6.4. Model regularnej siatki kwadratów..............................................................17
1.6.5. Model siatki trójkątów (TIN).......................................................................18
1.6.6. Model warstwicowy ....................................................................................19
1.7.
G
ENERALIZACJA
....................................................................................................19
1.8.
Ź
RÓDŁA DANYCH
...................................................................................................21
1.8.1. Dane wektorowe..........................................................................................22
1.8.2. Dane rastrowe .............................................................................................24
ROZDZIAŁ 2. MAPY NUMERYCZNE ................................................................................... 27
2.1.
D
EFINICJA MAPY NUMERYCZNEJ
.............................................................................27
2.2.
P
OJĘCIA ZWIĄZANE Z MAPAMI
................................................................................29
2.2.1. Obiekty i atrybuty .......................................................................................29
2.2.2. Warstwa mapy ............................................................................................29
2.2.3. Mapa tematyczna ........................................................................................30
2.2.4. Skala mapy..................................................................................................30
2.2.5. Oznaczenia obiektów na mapach.................................................................31
2.2.6. Jednostki ewidencyjne.................................................................................32
2.3.
K
LASYFIKACJA MAP
...............................................................................................32
2.4.
Z
NAKI KARTOGRAFICZNE
.......................................................................................32
2.5.
O
DWZOROWANIA KARTOGRAFICZNE
......................................................................34
2.5.1. Rodzaje odwzorowań kartograficznych .......................................................35
2.6.
U
KŁADY WSPÓŁRZĘDNYCH GEODEZYJNYCH
...........................................................36
2.7.
M
APA RASTROWA A MAPA WEKTOROWA
................................................................38
2.7.1. Mapa wektorowa.........................................................................................38
2.7.2. Mapa rastrowa.............................................................................................39
2.8.
M
APA W
I
NTERNECIE
(W
EB
GIS) ............................................................................40
ROZDZIAŁ 3. ANALIZA DANYCH PRZESTRZENNYCH................................................... 42
3.1.
P
ODSTAWY ANALIZY
..............................................................................................42
3.2.
K
LASYFIKACJA I WYSZUKIWANIE
...........................................................................45
3.2.1. Wskazywanie ..............................................................................................45
3.2.2. Selektywne wyszukiwanie...........................................................................46
3.2.3. Klasyfikacja ................................................................................................46
3.3.
P
OMIARY
...............................................................................................................47
3.4.
F
UNKCJE SĄSIEDZTWA
...........................................................................................48

3
3.5.
F
UNKCJE ŁĄCZENIA
...............................................................................................48
3.5.1. Funkcje ciągłości.........................................................................................49
3.5.2. Buforowanie................................................................................................49
3.5.3. Funkcje sieciowe.........................................................................................49
3.6.
F
UNKCJE NAKŁADANIA
..........................................................................................50
3.7.
A
UTOKOWARIANCJA GEOSTATYSTYCZNA
(
PRZESTRZENNA
) ....................................51
3.8.
K
ONWERSJA FORMATÓW DANYCH
..........................................................................51
ROZDZIAŁ 4. PRZEGLĄD NAJBARDZIEJ POPULARNYCH SYSTEMÓW SIP/GIS........ 53
4.1.
PC
A
RC
/I
NFO
........................................................................................................53
4.2.
M
AP
I
NFO
..............................................................................................................54
4.3.
MGE
(M
ODULAR
GIS
E
NVIROMENT
).....................................................................55
4.4.
M
ICROSTATION
G
EO
G
RAPHICS
..............................................................................56
4.5.
M
APA
-
500 ...........................................................................................................57
4.6.
TNT
MIPS
...............................................................................................................58
ROZDZIAŁ 5. ZAŁOŻENIA SYSTEMU EGB2000-SIP ......................................................... 59
5.1.
O
PIS SYSTEMU
EGB2000.......................................................................................59
5.2.
C
EL SYSTEMU
........................................................................................................61
5.3.
P
RZYJĘTE ZAŁOŻENIA
............................................................................................62
ROZDZIAŁ 6. IMPLEMENTACJA MODUŁU INTERNETOWEGO EGB2000–SIP ............ 64
6.1.
P
LATFORMA SYSTEMOWA
......................................................................................64
6.2.
U
Ż
YTE TECHNOLOGIE I NARZĘDZIA PROGRAMISTYCZNE
..........................................64
6.2.1. Technologia ASP (ang. Active Server Pages) ..............................................64
6.2.2. Bazy danych................................................................................................65
6.2.3. Dostęp do bazy danych................................................................................66
6.2.4. Biblioteka graficzna ....................................................................................66
6.2.5. Technologia ActiveX i COM.......................................................................66
6.3.
Z
ASTOSOWANE ROZWIĄZANIA
...............................................................................68
6.3.1. Sposób działania EGB2000-SIP ..................................................................68
6.3.2. Baza danych................................................................................................69
6.4.
I
MPLEMENTACJA FUNKCJI ANALITYCZNYCH SYSTEMU
EGB2000–SIP.....................72
6.4.1. Analizy zewnętrzne .....................................................................................73
6.4.2. Analizy wewnętrzne....................................................................................77
6.5.
D
ODATKOWE OPCJE
...............................................................................................87
6.5.1. Lista wyświetlonych działek........................................................................87
6.5.2. Menadżer warstw ........................................................................................87
6.5.3. Nawigator ...................................................................................................88
6.5.4. Inne funkcje systemu...................................................................................89
PODSUMOWANIE.................................................................................................................... 92
BIBLIOGRAFIA ........................................................................................................................ 94
SPIS ILUSTRACJI ..................................................................................................................... 96
ZAŁĄCZNIK A. KLASYFIKACJA MAP TEMATYCZNYCH............................................... 98
ZAŁĄCZNIK B. ZESTAWIENIE PROGRAMÓW TYPU SIP/GIS. ..................................... 101

4
Wstęp
Systemy informacji przestrzennej (SIP) są jednym z najszybciej rozwijających
się działów informatyki, rośnie także liczba ich użytkowników. Postęp, jaki uczyniono
w grafice komputerowej, bazach danych, a także wzrost mocy obliczeniowej
komputerów sprawia, że sprzęt i oprogramowanie SIP ustanowiły swoiste standardy
gromadzenia i przetwarzania danych przestrzennych. Prognozy na najbliższe 20-30 lat
wskazują, iż wszyscy będziemy korzystali z SIP oraz uzyskanych dzięki nimi wyników
analiz przestrzennych.
Ilość danych gromadzonych na świecie wzrasta z roku na rok, jednak same dane
nie stanowią jeszcze na tyle cennej informacji, by móc na jej podstawie podejmować
różnego rodzaju strategiczne decyzje, typu gdzie postawić dom lub wybudować nowe
lotnisko. Aby taka informacja mogła być użyta musi być: prawdziwa, pełna i
przedstawiona w odpowiedniej formie. W tym celu należy przeprowadzić analizę
przestrzenną posiadanych danych. Klasyczne metody analizowania danych polegają na
wykorzystywaniu typowych pakietów analizy statystycznej, które nie uwzględniają w
procesie analizy lokalizacji danych. W tym celu należy użyć specjalistycznych analiz,
jakie oferują systemy informacji przestrzennej.
Lokalizacja jest cechą niemal wszystkich obiektów, o których zbierane są dane. Domy
mają adresy, które definiują ich lokalizację. Określenie stanu lasów, dróg lub terenów
zagrożonych przez powódź jest nierozerwalnie związane z lokalizacją tych obiektów.
Ze wzglądu na to, że lokalizacja najczęściej określana jest przez współrzędne
przestrzenne (geograficzne), systemy te zyskały nazwę systemów informacji
przestrzennej (SIP).
Najważniejszą cechą tych systemów jest bez wątpienia analiza danych. Jej
obecność odróżnia systemy SIP od systemów projektowania wspomaganego
komputerowo CAD, programów do automatycznego tworzenia map czy też
przetwarzania obrazu.
Celem pracy, jaki sobie postawiłem było dokonanie analizy i przeglądu Systemów
Informacji Przestrzennej oraz stosowanych metod analizy danych w tych systemach.
Ponadto zbudowałem system umożliwiający prowadzenie analiz przestrzennych na
wektorowej
mapie numerycznej. Budowa takiego systemu jest zadaniem ciekawym, ale

5
jednocześnie bardzo złożonym. Z jednej strony
konieczne jest
zapoznanie się z budową
mapy numerycznej, która będzie miejscem prowadzonych analiz. Z drugiej strony
należy zaimplementować techniki tworzenia i rozpoznawania obiektów, rodzajów i
metod analiz przestrzennych Dodatkowo dochodzi użycie przyjętych i cenionych
narzędzi jak SQL Server, Oracle.
Rozporządzenie ministra finansów z 2001 roku w sprawie ewidencji gruntów i
budynków wprowadziło potrzebę prowadzenia ewidencji tych obiektów. W tym celu
powstał system EGB2000, który wspomaga użytkownika w zarządzaniu jednostkami
rejestrowymi oraz budynkami i lokalami, które do nich należą. System posiada wersję
klient-serwer oraz internetową. Pierwsza z nich współpracuje z programem
Microstation, który pozwala na dalece posunięte operacje na mapie numerycznej,
jednak jest rozwiązaniem niezwykle drogim. W wersji internetowej EGB2000 brak było
możliwości, rysowania działek i prowadzenia analiz.
System EGB2000–SIP dostarcza funkcje umożliwiające obrazowanie obiektów
ewidencyjnych oraz dokonywanie dużej liczby złożonych analiz przestrzennych.
Posiada całą gamę funkcji niezbędnych przy zarządzaniu mapą numeryczną w systemie
typu SIP. Działa w sieci Internet, co sprawia, iż jest wzbogaceniem EGB2000 In6ternet
o możliwość tworzenia mapy numerycznej i prowadzenia analiz.
W pierwszym rozdziale znajdują się ogólne informacje o systemach SIP, ich
historia, klasyfikacja, specyficzne dla nich zagadnienia. Ponadto
przedstawiam
podstawowe pojęcia i problemy, które będą niezbędna dla dalszego zrozumienia pracy.
Następnie
omawiam
mapy numeryczne, ich charakterystykę, podział, różnice
między mapą wektorową a rastrowa oraz najważniejsze zagadnienia. Znajduje się tu
również opis zasady działania systemów SIP w sieci Internet.
W trzecim rozdziale zostały opisane analizy przestrzenne. Każdą z metod
scharakteryzowano i przestawiono dla niej możliwości i przykłady wykorzystania. Duża
część z omawianych tu metod analizy została zaimplementowana w systemie.
W kolejnym rozdziale przedstawiłem najpopularniejsze systemy SIP, które były
dla mnie wzorem przy realizacji mojego zadania. Wybrałem systemy różnej klasy od
prostszych do tych niezwykle złożonych i rozbudowanych.
W piątym rozdziale umieściłem informacje o założeniach systemu EGB2000-
SIP, jego powiązaniu z systemem ewidencji gruntów i budynków EGB 2000.

6
Ostatni rozdział pracy poświęcony jest realizacji systemu, a zwłaszcza funkcji
analitycznych. Przedstawiłem tu technologie, jakie użyłem w czasie realizacji, zasadę
działa systemu oraz szczegółowy opis zaimplementowanych funkcji analitycznych.
Pracę kończy podsumowanie zawierające wnioski z wykonanej pracy.

7
Rozdział 1. Wprowadzenie do systemów
informacji przestrzennej
1.1. Definicja Systemu Informacji Przestrzennej
System informacji przestrzennej nie ma precyzyjnej definicji. Zazwyczaj
SIP jest określany za pomocą zbioru narzędzi poddanych organizacji pracy
przeznaczonych albo do modelowania rzeczywistości, albo do zarządzania przestrzenią
rzeczywistą, czyli jest określony w sposób techniczno-socjologiczny. Z tych rozróżnień
wynikają z kolei różne aspekty jego definicji, jednak wszystkie one są zbieżne.
„System informacji przestrzennej(SIP) jest to system informatyczny zaprojektowany do
pracy z danymi, które są odniesione do przestrzennych lub geograficznych
współrzędnych. Innymi słowy SIP jest za-równo systemem bazodanowym z
możliwością przechowywania przestrzennie odniesionych danych, jak i zbiorem funkcji
przeznaczonych do przetwarzania tych danych.” [3]
„SIP to system składający się ze sprzętu, oprogramowania i procedur zaprojektowany
dla zbierania, zarządzania, manipulowania, analizowania, modelowania i wizualizacji
danych odniesionych przestrzennie, w celu rozwiązywania skomplikowanych
problemów planistycznych i organizacyjnych.” [2]
Systemy informacji przestrzennej mają wielofunkcyjny charakter; powstały w
różnych środowiskach zawodowych. Okoliczność ta oraz fakt, iż systemy te
ukształtowały się niedawno, spowodowała pewne niespójności, co do terminologii. W
ś
rodowisku geografów funkcjonuje pojęcie systemu informacji geograficznej (GIS),
wśród geodetów spotykamy się z terminem systemy informacji terenowej (LIS).
Granica między tymi pojęciami nie jest jednoznaczna. Pojęcie GIS łączone jest z
małymi skalami, natomiast systemy terenowe przypisuje się do dużych skal.
GIS (ang. Geographical Information System) - Geograficzny System Informacyjny to
zorganizowany system składający się z komputera, oprogramowania, danych
geograficznych i obsługi, zaprojektowany w celu efektywnego przechowywania,
uaktualniania, przetwarzania, analizowania i wyświetlania wszystkich form informacji
mających odniesienie geograficzne.

8
LIS (ang. Land Information System) – System Informacji o Terenie zawiera on
informacje o podziale własności terenu. Systemy te są utrzymywane i zarządzane przez
jednostki administracji państwowej, które są prawnie zobligowane do przechowywania,
aktualizacji i udostępniania tych danych.
1.2. Historia SIP
Jako początek systemów SIP przyjmuje się późne lata pięćdziesiąte, wówczas to
nastąpiły pierwsze próby użycia komputerów do tworzenia map tematycznych, czyli
map przedstawiających jedno lub kilka zjawisk występujących na powierzchni Ziemi.
Wciąż rosnący rozwój techniki komputerowej sprzyjał zwiększeniu różnorodności
zastosowań w analizach danych przestrzennych.. Na początku lat sześćdziesiątych w
MIT (ang. Massachusette Institute of Technology) opracowano technikę kreślenia
komputerowego, w tym samym czasie szwedzki geograf T. Hagerstrand wprowadził
analizę ilościową do geografii, a w Wielkiej Brytanii wynaleziono digitalizer.
Wszystkie te wydarzenia wpłynęły na rozwój i powstanie pierwszych systemów SIP.
Funkcje pierwszych systemów ograniczały się do inwentaryzacji danych
przestrzennych. Pierwszy duży SIP o zdolnościach analitycznych powstał pod koniec lat
sześćdziesiątych (ang. TheCanadian Geographic Information System). System
gromadził dane o rolnictwie, leśnictwie oraz użytkowaniu ziemi. Posiadał on duże
ograniczenia, gdyż powstanie każdego nowego projektu wiązało się ze stworzeniem od
podstaw bazy danych przestrzennych, co wymagało sczytania ogromnej liczby
tradycyjnych map papierowych. Również możliwości graficznej prezentacji danych
były znacznie ograniczone.
Większość pionierskich prac nad oprogramowaniem SIP do analizy danych
przestrzennych pochodzi z komputerowego laboratorium w Harwardzie (ang.
Laboratory for Computer Graphics and Spatial Analysis
), które założono w 1965 r.
Opracowywano tam rozwiązani, które stanowiły wytyczne do dalszego rozwoju
systemów SIP, przykładem może być system SYMAP. Jedną z pierwszych firm
oferujących systemy SIP była M&S Computing, przekształcona później w Intergraph,
który do tej pory jest potentatem na rynku systemów przestrzennych. W ślad za nią
wiele innych firm wprowadziło do sprzedaży interakcyjne systemy SIP. Były to
systemy rastrowe, w których mapa przechowywana w bazie miała postać tablicy
wartości sczytanych w polach siatki nałożonej na tradycyjną mapę papierową. Pierwszy

9
system wektorowy, w którym wszystkie elementy zapisane są w postaci obiektów
powstał w firmie ESRI.
Lata siedemdziesiąte przyniosły gwałtowny rozwój technologii CAD (ang.
Computer-Aided Design
) i większość firm zainteresowała się tym kierunkiem. Ciągły
rozwój technologii komputerowej, pojawienie się zdjęć satelitarnych sprawiało, iż
dziedzina ta bardzo szybko się rozwijała. Na początku lat osiemdziesiątych połączono
bazy danych zawierające graficzny opis obiektów z bazami zawierającymi ich tekstowy
i numeryczny opis. Pozwoliło to na wprowadzenie dodatkowych, nowych funkcji
analitycznych i stało się kamieniem milowym w rozwoju obecnych systemów SIP.
1.3. Elementy Systemów Informacji Przestrzennej
Funkcjonalnie na pojęcie SIP składa się wiele elementów. Można założyć, iż
system powinien być budowany w celu spełnienia oczekiwań i potrzeb klienta. Cel, dla
którego budowany jest system, określa zakres danych, które muszą być w nim
gromadzone i przetwarzane. Rozmiar bazy danych, wymaga szybkości ich
przetwarzania, sposób emitowania danych oraz liczba użytkowników determinuje
przyjęte rozwiązania sprzętowe oraz pozwala określić, jakie oprogramowanie może być
użyte.
Możemy wyróżnić następujące elementy składowe SIP:
•
Ze względu na etapy tworzenia i funkcjonowania systemu
- pozyskiwanie danych
- gromadzenie danych
- korygowanie i przetwarzanie danych
- analizy danych – tworzenie informacji
- wizualizacja i udostępnianie danych
•
Ze względu na składniku materialne i intelektualne systemu
- sprzęt
- oprogramowanie
- dane
- personel
- organizacja wewnętrzna instytucji

10
1.4. Pojęcia związane z informacją przestrzenną
Przedstawię teraz pojęcia związane z informacja przestrzenna, które będą
niezbędne dla dokładnego zrozumienia dalszej części pracy.
1.4.1. Dane przestrzenne
Podstawową cechą danych przestrzennych jest to, że mają lokalizację, czyli
określone położenie na powierzchni Ziemi. Położenie określa się przy użyciu różnego
rodzaju układów współrzędnych, które to swoje korzenie mają w sferycznym lub
kartezjańskim układzie współrzędnych. Kolejną charakterystyczną cechą jest fakt, iż
mają kształt, tzn. są jedno- lub dwuwymiarowe, a także coraz częściej mówi się o
wprowadzeniu
obiektów
trójwymiarowych,
a
nawet
czterowymiarowych
uwzględniających zmiany w czasie.
Dane przestrzenne możemy podzielić na dwie grupy: dane ciągłe i nieciągłe.
Przykładem danych ciągłych jest wysokość nad poziomem morza, rozkład temperatur
lub opadów na powierzchni Ziemi, czyli wielkości określone w każdym punkcie
naszego globu. Danymi nieciągłymi będą wszystkie dane, które mają charakter
obiektów np.: budynki, lasy, drogi. Charakterystyczną cechą danych stanowiących
obiekty są ich kształt i rozmiar, które mogą podlegać pomiarowi np.: punkt ma
wysokość, linia – długość oraz kierunek.
Kolejną charakterystyczną własnością obiektów jest ich rozmieszczenie.
Rozmieszczenie obiektów w przestrzeni określa gęstość, czyli liczba elementów na
jednostkę powierzchni.
Dane systemu informacji przestrzennej, charakteryzowane są przez wiele parametrów, a
najważniejsze to:
-
Dokładność – zgodność z rzeczywistością
-
Precyzja – zdolność dokładnego przedstawienia wielkości, np.: liczba po
przecinku we współrzędnej
-
Rozdzielczość – zdolność rozróżniania wielkości, określenia najmniejszego
rozróżnialnego w systemie obiektu
-
Zmienność – średni czas, po jakim następuje zmiana obiektu w
rzeczywistości
11
-
Aktualność – czas, jaki upłynął pomiędzy zmianą obiektu w rzeczywistości
a pobraniem informacji o nim z systemu. Aktualność zależna jest od
procedur aktualizacji danych.
-
Wiarygodność – zgodność w granicach dopuszczalnych błędów pomiędzy
stanem rzeczywistym a ustalonym na podstawie systemu.
-
Wartość – określana na podstawie korzyści wynikających z uzyskania
danych z systemu w stosunku do innych metod pozyskiwania informacji.
Można ją porównać ze stratą, jaką użytkownik mógł ponieść gdyby z
systemu nie skorzystał.
W zależność od przyjętego modelu danych przestrzennych oraz parametrów
określonych powyżej system stanowi mniej lub bardziej wierne odbicie rzeczywistości.
1.4.2. Jakość danych
W systemach SIP, podobnie jak w każdym systemie wykorzystującym dane,
rezultat pracy zależy od jakości danych. Wprowadzanie bezwartościowych lub
błędnych danych powoduje, iż rezultat jest fałszywy bez względu na to jak pięknie
zostały one przedstawione.
Stopień dokładności danych jest różny w zależności od systemu, inna dokładność jest
wymagana przy systemach obsługujących mapy kartograficzne, a inna przy
analizujących procesy ludnościowe w kraju.
Dokładność danych można określić za pomocą różnych charakterystyk, z
których najbardziej istotne to: dokładność pozycji, dokładność atrybutu, logiczna
spójność i kompletność.
Dokładność pozycji określana jest jako oczekiwana różnica pomiędzy pozycją danej ze
zbioru danych i pozycją rzeczywistą. Najczęściej dokładność ta wyrażana jest za
pomocą średniego błędu kwadratowego:
n
a
x
n
i
i
i
∑
−
=
2
)
(
δ
gdzie : x
i
– wartość prawdziwa,
a
i
– wartość znajdująca się w zbiorze danych
n– liczba danych

12
Dokładność atrybutu jest nieco bardziej trudniejsza do zdefiniowania, gdyż
atrybut może mieć zarówno charakter ciągły jak i dyskretny. Jako przykład wartości
ciągłej może posłużyć wysokość punktu nad poziomem morza. Wartością dyskretną jest
np.: rodzaj lasu (iglasty, liściasty). Dokładność atrybutów ciągłych możemy określić za
pomocą średniego błędu kwadratowego(podobnie jak dokładność pozycji). Natomiast
dokładność atrybutów dyskretnych jest znacznie trudniejsza do określenia, gdyż zależy
od sposobu wyznaczania danej klasyfikacji.
Logiczna spójność decyduje o zachowaniu logicznych relacji między
elementami. Jako przykład może posłużyć sytuacja, w której na jednej warstwie mamy
zaznaczone granice województw, a na drugiej sieć rzeczną, przy czym sieć ta wyznacza
granice województw. W tym przypadku odpowiednie odcinki granic i rzek muszą być
identyczne.
Kompletność danych precyzuje na ile model danej rzeczywistości uwzględnia
wszystkie elementy znajdujące się w terenie. Zbiór danych opisujących miasta w danym
kraju jest kompletny, jeżeli zawiera wszystkie miasta.
Jakość danych jest niezwykle istotna i powinna być kontrolowana na każdym
etapie przygotowywania, także sposób pozyskiwania danych(o sposobach pozyskiwania
danych więcej w rozdziale 21.8. Źródła danych) powinien być dopasowany do rodzaju
danych. Dane w systemach SIP niemal zawsze będą zawierały błędy z powodu
różnorodności i wielkości zbiorów danych. Powinny być jednak ciągle poddawane
kontroli, aby ich jakość nie miała dużego wpływu na uzyskaną informację.
1.4.3. Triangulacja
„Triangulacja jest to rodzaj pomiarów geodezyjnych, wykonywanych w celu
określenia położenia wybranych punktów w terenie”
1
Triangulacja to procesem generowania siatki, który ma najczęściej zastosowanie do
danych nie wymagających regionalnego uśredniania, jak na przykład wysokości terenu.
Powierzchnia, powstająca w wyniku procedury triangulacji, przecina wszystkie
zmierzone wartości danych punktowych generując przy tym miejsca niewielkiego
wypiętrzenia powyżej najwyższych i obniżenia poniżej najniższych wartości lokalnych.
1
za:
Wielka Internetowa Encyklopedia Multimedialna;www.wiem.pl

13
Triangulacja wykorzystuje tę właściwość trójkąta, że znajomość jednego boku
i dwu kątów wystarczy do konstrukcji całej figury, a pomiar terenowy kątów jest
znacznie prostszy niż odległości. Triangulację stosuje się m.in. do dokładnego pomiaru
terenu kraju, przy konstrukcji map topograficznych.
Została wynaleziona w 1615 przez W. Snella van Royena. Obecnie w triangulacji
wykorzystuje się najnowsze techniki, np. połączenia satelitarne (system GPS).
Proces triangulacji został szerzej przedstawiony w punkcie 1.6.5 Model siatki trójkątów
(TIN)
1.5. Klasyfikacja systemów informacji przestrzennej
Systemy informacji przestrzennej mogą być klasyfikowane według różnych
kryteriów. Wybrałem podział, który został zaproponowany przez J. Gaździckego [4],
gdyż wydaje mi się, iż jest najprostszym i w pełni intuicyjny:
Klasyfikacje SIP można dokonać według następujących kryteriów:
1. Obszar
•
systemy obiektowe
•
systemy lokalne
•
systemy regionalne
•
systemy krajowe
•
systemy międzynarodowe
•
systemy globalne
2. Źródłowość informacji
•
Systemy informacji pierwotnej
•
Systemy informacji wtórnej (zredagowanej)
3. Zakresu użytkowania
•
Systemy dla jednego konkretnego użytkownika
•
Systemy dla wielu użytkowników
4. Struktury funkcjonalnej
•
Systemy scentralizowane
•
Systemy rozproszone

14
5. Przeznaczenia
•
Systemy ewidencyjne
•
Systemy planowania przestrzennego
•
Systemy monitorowania środowiska
•
Systemy analiz marketingowych]
•
Inne systemy
1.6. Modele danych przestrzennych
Obserwując świat w sposób bezpośredni nie musimy wyodrębniać jego
składowych dopóki nie chcemy go opisać, czyli zamienić na informację. Dokonujemy
wtedy uproszczeń sprowadzających główne elementy naszych obserwacji do
odpowiednich pojęć, klasyfikując ich właściwości, wartościując ich znaczenie dla celu
naszej obserwacji oraz określając położenie i wzajemne relacje przestrzenne, np.: "za",
"przed", "pośrodku". W przypadku szczególnym naszej obserwacji - spojrzenia z lotu
ptaka, opis przestrzeni można uprościć sprowadzając obserwowane elementy do
prymitywnych obiektów geometrycznych typu: punkt, linia, powierzchnia. Zakodowaną
informację, np. w postaci słów, możemy przekazać odbiorcy licząc, że on, korzystając
ze znajomości znaczenia kodu odtworzy wiernie treść odebranej informacji.
Identyczny proces, ze względu na swoją ideę ma miejsce podczas tworzenia „bazy
przestrzennej” w komputerze. Z przestrzeni geograficznej wyodrębnia się najważniejsze
dla celu naszych badań obiekty (encje), określa się sposób ich reprezentacji
geometrycznej (punkt linia, poligon, piksel itd.) oraz przypisuje właściwości (atrybuty).
Rozszerzając nieco powyższe rozważania i przenosząc do terminologii SIP, ten etap
tworzenia „bazy przestrzennej” można określić terminem: poziom konceptualny (ang.
universe of discourse
). Na poziomie konceptualnym podstawowe znaczenia ma
składowa semantyczna (definicja znaczenia obiektów) i definicji danych ( format,
reprezentacja geometryczna i informacja tematyczna).
Istnieje wiele modeli reprezentacji danych przestrzennych [4], [7],[18] od prostych do
tych bardziej skomplikowanych. Poniżej przestawię najbardziej znane rozwiązania.
Należy jednak pamiętać, iż nie ma rozwiązania idealnego. Każdy z modeli ma swoje
zalety oraz ograniczenia. Wybór modelu należy dostosować do charakteru encji.
Intuicyjnie zakłada się, iż do mapowania zmienności ciągłej, jak rozkład zanieczyszczeń
15
lepszy będzie model rastrowy, podczas gdy do mapowania sztucznych granic np.:
granic administracyjnych lepiej skorzystać z modelu wektorowego. Drugim aspektem
wypływającym z przyjętego modelu danych będzie funkcjonalność „bazy
przestrzennej” oraz możliwości wykorzystania różnych technik analitycznych.
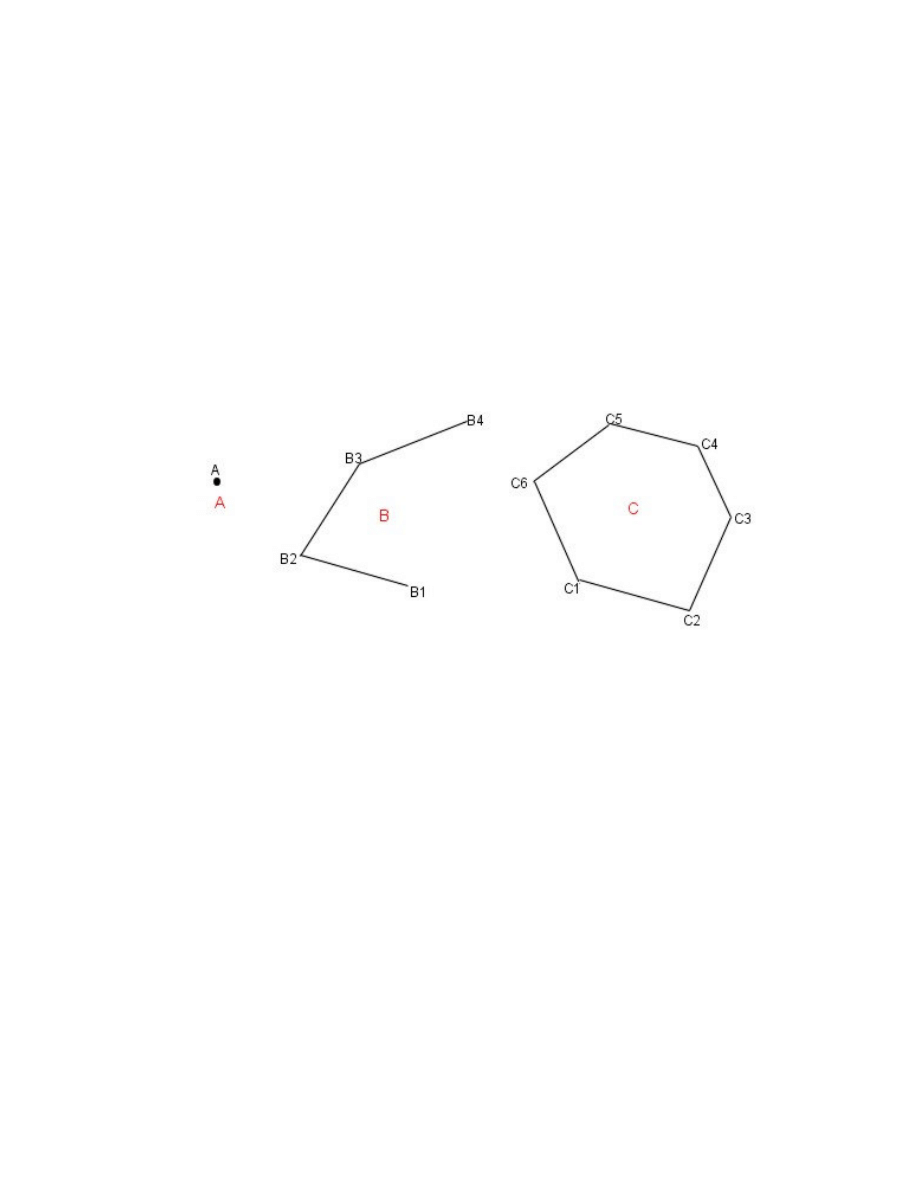
1.6.1. Prosty model wektorowy
Prosty model wektorowy(Rysunek 1) stanowi zbiór nie powiązanych ze sobą
obiektów punktowych, liniowych i powierzchniowych.
Rysunek 1. Obiekt punktowy (A), liniowy (B) i powierzchniowy (C) w prostym modelu wektorowym.
Obiekty przedstawione na rysunku mogą być opisane w następujący sposób:
- A, (x
A
, y
A
)
- B, (x
B1
, y
B1
, x
B2
, y
B2
, ... , x
Bn
, y
Bn
)
- C, (x
C1
, y
C1
, x
C2
, y
C2
, ... , x
Cn
, y
Cn
, x
C1
, y
C1
).
Tworzą one odpowiednio kodowaną listę, która jest przetwarzana przez program
komputerowy do postaci rysunku na monitorze.
Główną zaletą tego modelu jest prostota. Wykorzystywany jest powszechnie w
programach graficznych typu CAD. Model ten posiada również istotne wady:
- konieczność dublowania informacji na stykach obiektów, co powoduje
kłopoty przy aktualizacji, która może prowadzić do braku tożsamości
współrzędnych teoretycznych tych samych punktów
- utrudniona analiza związków przestrzennych zachodzących między
obiektami
16
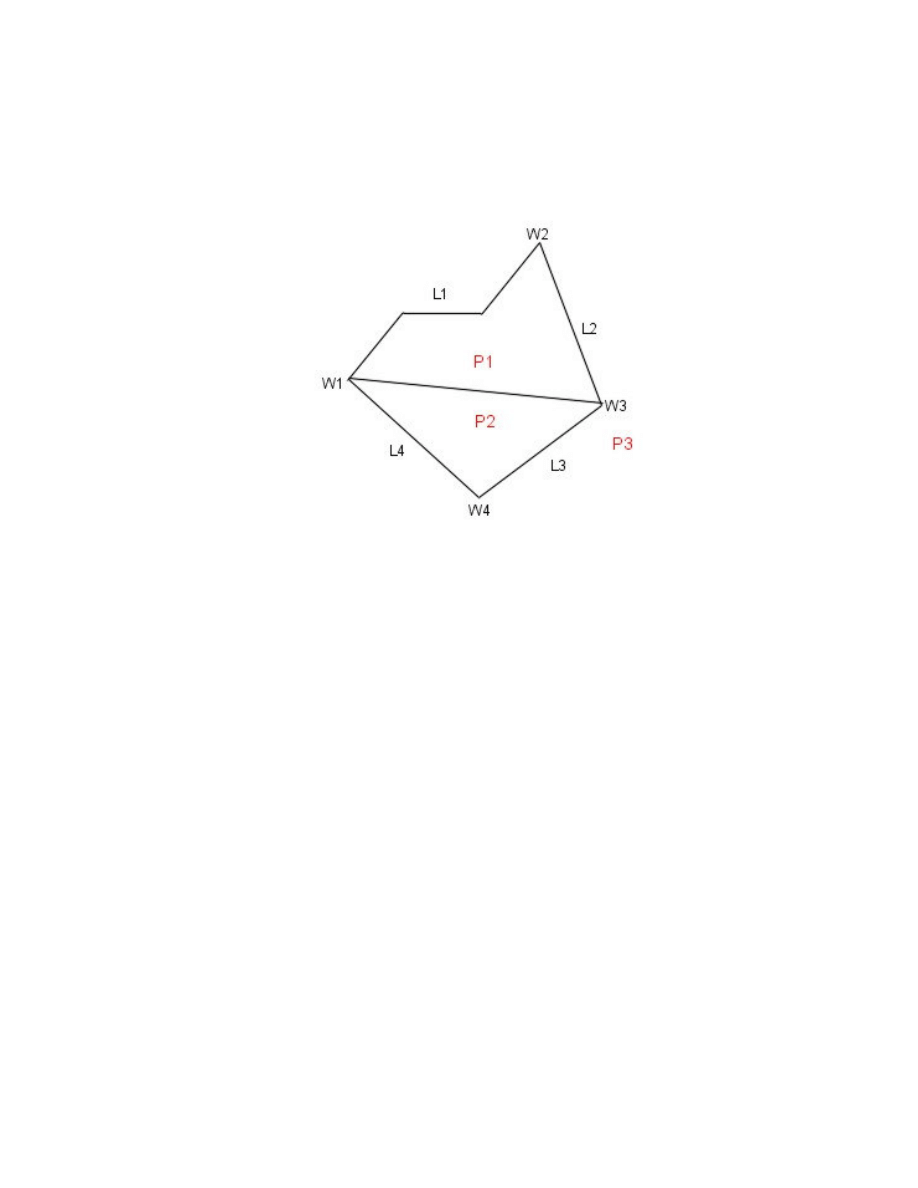
1.6.2. Topologiczny model danych wektorowych
W topologicznym modelu danych(Rysunek 2), oprócz położenia obiektu,
definiowany jest jego związek z innymi obiektami.
Rysunek 2. Topologiczny model danych.
Model ten pozwala na zapis danych określających:
- obszary stykające się z danym obszarem
- linie graniczne
- punkty węzłowe
Topologiczny model przestrzeni gwarantuje zapisanie współrzędnych każdego punktu
tylko raz, nie ma więc powtarzania i niejednoznaczności danych. Bardzo łatwo można
dokonać aktualizacji danych. Zmiana położenia jednego z punktów charakterystycznych
automatycznie powoduje zmianę modelu. Ułatwione są wszelkie operacje przestrzenne,
np.: wyszukanie pewnego obszaru wymaga jedynie znalezienia wszystkich linii, które
po lewej lub prawej stronie mają przypisany ten obszar. Znalezienie takich linii oraz
dostęp do wszystkich ich punktów charakterystycznych umożliwia automatyczne i
jednoznaczne wyznaczenie długości obwodu i pola powierzchni badanego obszaru i ich
bieżącą aktualizację w przypadku wprowadzenia jakichkolwiek zmian.
Topologiczny model danych przestrzennych w znacznym stopniu upraszcza
algorytmy obliczeniowe, umożliwia wykonywanie różnorodnych analiz przestrzennych
łącznie z wzajemnym przecinaniem się warstw informacyjnych. Jest on powszechnie
wykorzystywany w zaawansowanych programach umożliwiających budowę SIP.
17
1.6.3. Model rastrowy
Model rastrowy składa się z siatki elementów, którymi są kwadraty bądź
prostokąty. Najmniejszym rozróżnialnym elementem modelu rastrowego jest oczko
rastra, czyli piksel. Położenie piksela określa jednoznacznie numer w matrycy. Model
ten jest niewrażliwy na zmiany granic obiektów przestrzennych, ułatwia więc analizy i
ich zmian w czasie. System ten charakteryzuje się ponadto dużym stopniem
zautomatyzowania procesu pozyskiwania danych.
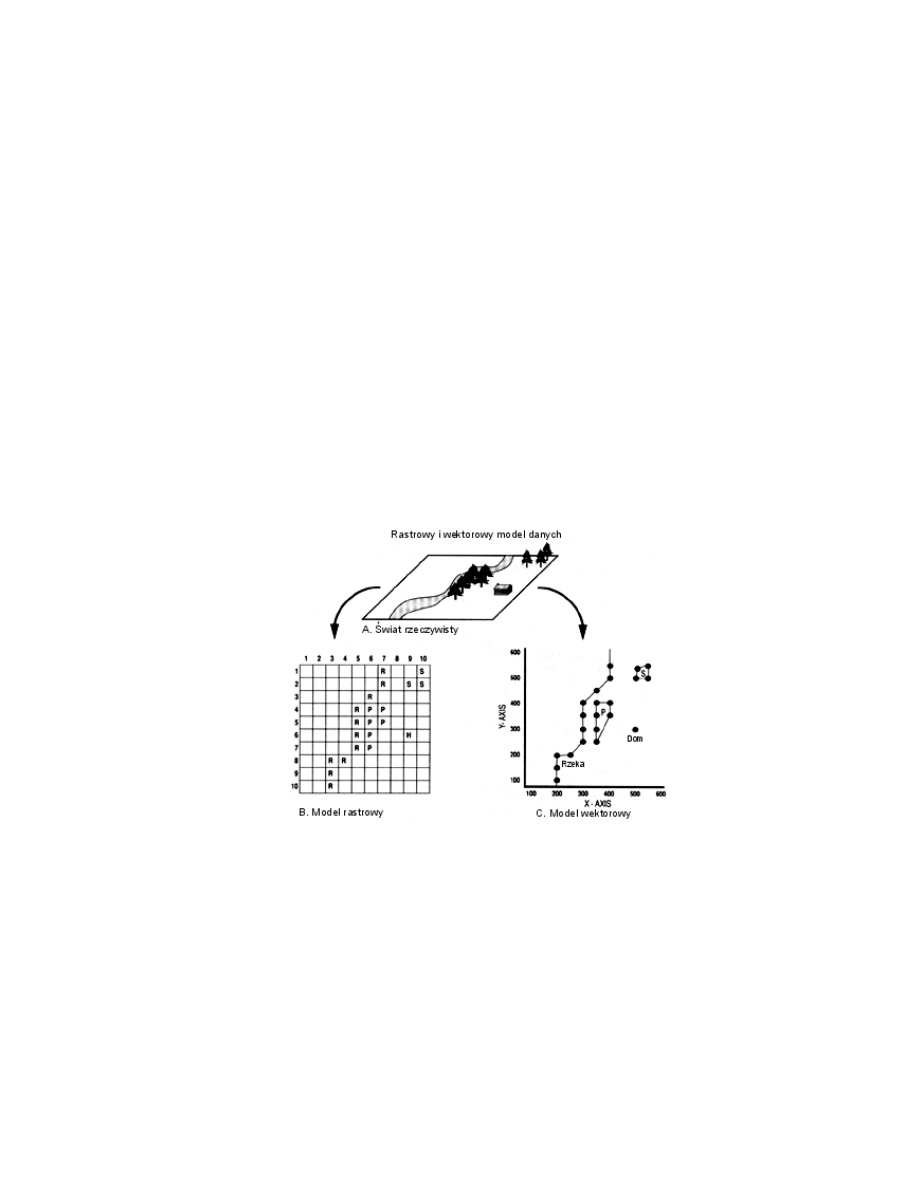
Zazwyczaj model rastrowy zapisywany jest w postaci dwuwymiarowej
tablicy(Rysunek 3) A[i,j], gdzie elementami o danej wartości atrybutu są a
ij,
zaś
wskaźniki (i,j) określają położenie wiersz-kolumna elementu tablicy. Model ten może
być także reprezentowany w sposób wielowymiarowy A[i,j,k,...] ale zależy to od liczby
atrybutów określających elementy. Tutaj także wskaźniki (i,j) określają położenie
wiesz-kolumna, natomiast pozostałe są wskaźnikami odpowiednich atrybutów.
Rysunek 3. Rastrowy i wektorowy model danych.
Rastrowy model danych wykorzystywany jest głównie w systemach badających
przestrzeń przyrodniczą, pozwala śledzić różnorodne interakcje obiektów ekosystemu i
formułować odpowiedzi na pytania związane z funkcjonowaniem przyrody.
1.6.4. Model regularnej siatki kwadratów
Model ten bazuje na kwadracie jako podstawowym elemencie siatki. Jest to
prosty model składający się z siatki punktów węzłowych. Położenie punktów w takim
18
modelu związane jest jedynie z wielkością siatki. Nie odpowiada to w żaden sposób
ś
ciślejszemu odwzorowaniu formy i szczegółów terenu. Wynika z tego, iż złożoność
tych szczegółów nie jest tu dostatecznie uwzględniona. W celu zwiększenia dokładności
odzwierciedlania modelu stosuje się proces zwiększanie gęstości siatki, który odnosi się
do całej powierzchni terenu. Powoduje to redundancje danych w miejscach gdzie
zwiększona gęstość nie jest wymagana.
Możliwość rozróżnienia szczegółów daje zmodyfikowana odmiana modelu siatki
kwadratów z zagęszczeniem w ściśle określonych miejscach.
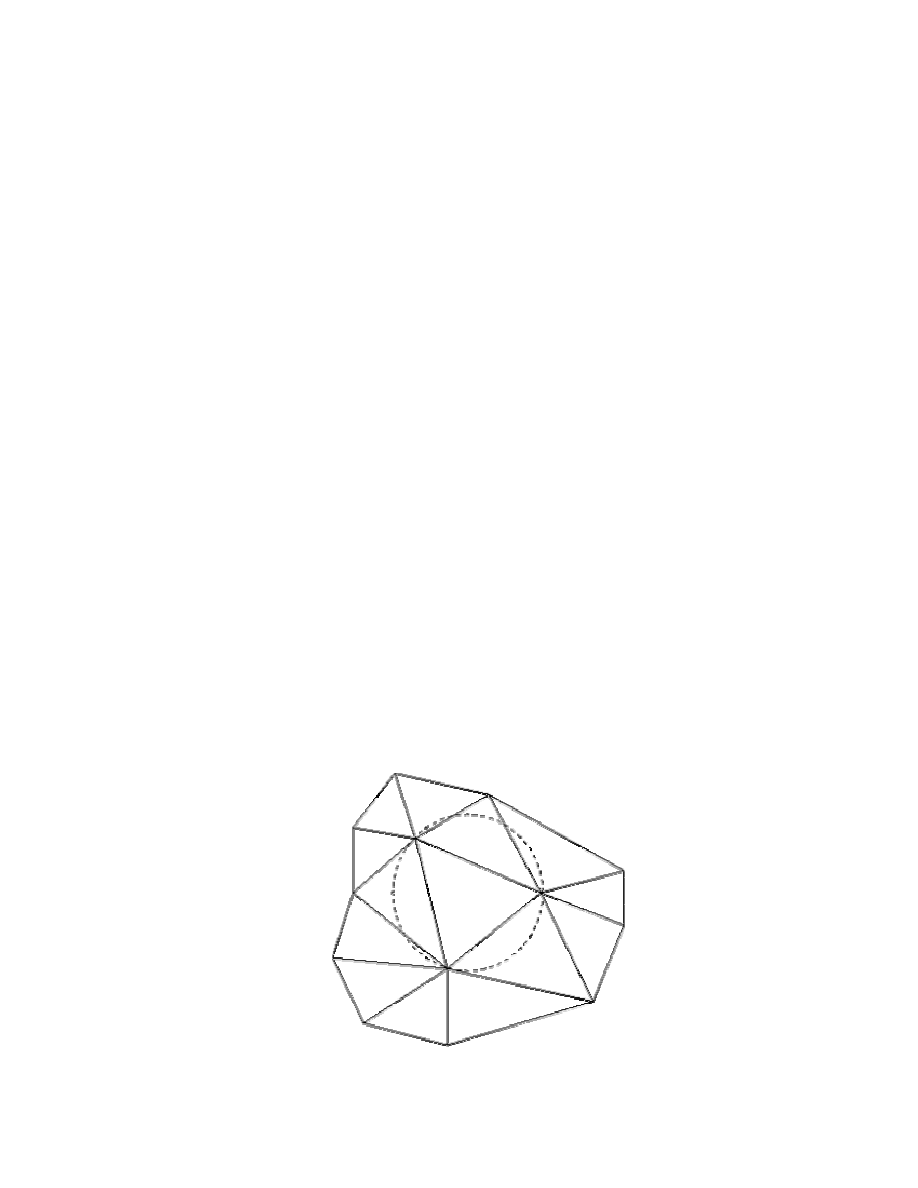
1.6.5. Model siatki trójkątów (TIN)
Tworzenie siatki trójkątów, na których opary jest ten model, nazywa się
triangulacją.
Triangulacja stanowi proces, podczas którego oryginalne dane punktowe są łączone w
przestrzeń przy pomocy sieci złożonej z powierzchni trójkątnych, wyrysowanych z
zachowaniem priorytetu przybliżenia kształtu powierzchni do trójkątów równobocznych
zgodnie z zasadami tworzenia sieci nieregularnych trójkątów (TIN – ang. triangulated
irregular network
).
Łączenie punktów jest oparte o relację najbliższego sąsiedztwa (kryterium Delaunlay),
która wskazuje, że koło opisane na którymkolwiek trójkącie nie może zawierać
wierzchołków innego trójkąta(Rysunek 4). Metoda ta gwarantuje ciągłość i
wygładzenie powierzchni wzdłuż boków każdego z trójkątów i wygładzenie
powierzchni w obrębie każdego trójkąta.
Rysunek 4. Ilustracja triangulacji Delaunaya
19
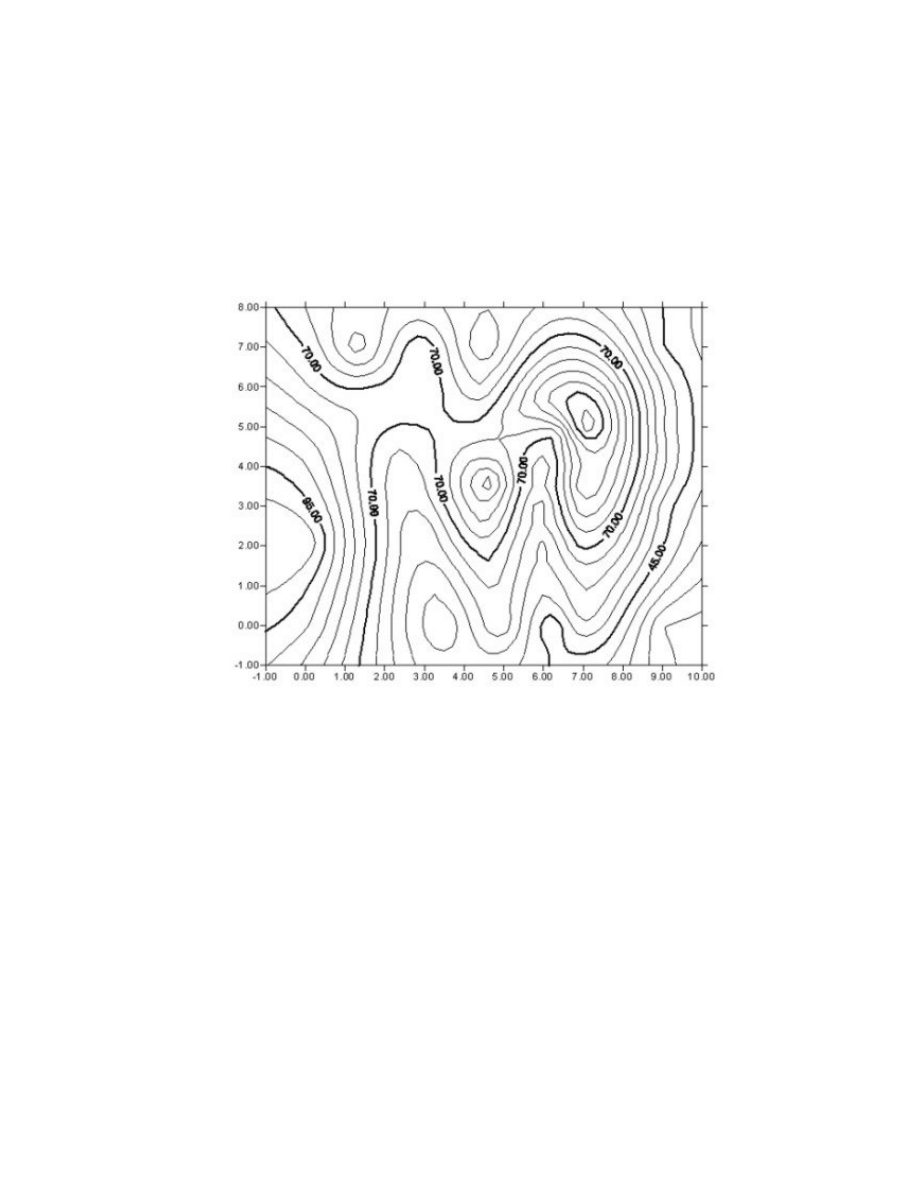
1.6.6. Model warstwicowy
Model ten tworzą elementy, z których każdy jest ciągiem par współrzędnych:
(x
1
, y
1
, x
2
, y
2
,…, x
n
, y
n
)
punktów pochodzących z odcinka o jednakowej i ustalonej wysokości.
Warstwice definiowane są jako linie powierzchni, zawierające określone geometrycznie
i tej samej wysokości punkty.
Rysunek 5. Warstwice; utworzone w programie Surfer 7.
1.7. Generalizacja
W przypadku obróbki danych przestrzennych generalizacja znajduje
zastosowanie w dwóch głównych obszarach. Pierwszym jest generowanie danych
tematycznych dla kompleksowych analiz w systemach GIS, drugim prezentacja danych
w różnych skalach. Oba wymagają wybrania podzbioru danych z bazy danych oraz
redukcji liczby szczegółów w celu spełnienia określonych wymagań. Generalizacja od
dawna uważana jest jako istotny składnik w procesie tworzenia map.
Muller [9] wyróżnia cztery powody, dla których wykonuje się generalizację:
-
wymogi ekonomiczne – nasza wiedza o środowisku jest empiryczna, a jej
zakres zależy od przyjętego programu badawczego. Pozyskiwanie

20
informacji z przyczyn technicznych jest zawsze ograniczone, dlatego
stosujemy zasadę uogólnienia – generalizacji
-
wiarygodność informacji – wszystkie dane przestrzenne są obarczone
błędem powstającym w trakcie ich, zapisu i przetwarzania. Źródłem błędów
jest niedoskonałość przyrządów, niewłaściwa metoda pomiarowa lub też
błąd spowodowany jest przez pomyłkę człowieka. W celu znalezienia
pewnej ogólnej tendencji, uzyskaniu wyniku o największym
prawdopodobieństwie, stosujemy generalizację
-
właściwości skalowe – wiele zjawisk przyrodniczych wykazuje właściwości
skalowe, tzn. pewne procesy widoczne są tylko w danej skali przestrzennej.
W celu wykrycia zjawisk skalowych informacja powinna być przetworzona
za pomocą generalizacji
-
czytelność przekazu graficznego – w kartografii jest to podstawowe
zastosowanie generalizacji. Mapy wielkoskalowe, które zawierają bardzo
szczegółową informację przestrzenną są nieczytelne i znacznie
przewyższają zdolności wizualnego odbioru. W tym celu stosuje się
generalizację, która polega na zagęszczeniu i selekcji danych.
Generalizacje należy rozumieć jako wybór i uproszczenie informacji
kartograficznej, dostosowane do skali i przeznaczenia mapy. Rozróżniamy generalizacje
automatyczną i ręczną. Generalizacja ręczna jest niezwykle czasochłonna.
Kartografowie usuwają obiekty nieistotne, upraszczając linie oraz granice, łącząc
obiekty powierzchniowe oraz rozwiązując konflikty powstałe przy rysowaniu. Rezultat
takich działań jest bez wątpienia zależny od wykonawcy.
Rozbudowa baz danych przestrzennych spowodowała, iż zaistniała potrzeba
zautomatyzowania procesu generalizacji. Dostawcy oprogramowania GIS/SIP wciąż
starają się określić problemy związane z komputerową generalizację oraz znaleźć ich
rozwiązania. Jednak żaden z istniejących systemów SIP nie dostarcza zestawu narzędzi,
które spełniałyby wymogi generalizacji, gdyż sam proces generalizacji automatycznej
jest niezmiernie skomplikowany.
Generalizacja obejmuje dużą liczbę analiz przestrzennych oraz decyzji: co
generalizować, jak generalizować oraz jak rozwiązywać konflikty między symbolami.
Skomplikowany proces generalizacji może być rozłożony na pojedyncze operatory,
które wykonywane w odpowiedniej kolejności dadzą oczekiwany wynik
W literaturze wyróżniane są następujące operatory generalizacyjne:

21
•
redukujące liczbę obiektów
- eliminacja - usuwanie wybranych obiektów, które są zbyt małe, zbyt
krótkie lub zbyt mało znaczące na wynikowej mapie, aby mogły być
przedstawione na wynikowej mapie.
- agregacja(grupowanie) – łączenie obiektów położonych blisko siebie
lub sąsiadujących ze sobą w nowe obiekty powierzchniowe
•
upraszczające kształt
- wygładzanie - eliminacja nieważnych szczegółów mapy
- karykaturyzacja – wyolbrzymianie, zwiększanie zajętych powierzchni
przez obiekt w celu zaakcentowania i zwiększenia czytelności lub
powiększenia istotnych szczegółów.
- zmiana wymiaru – wykonywana gdy niemożliwe jest przedstawienie
obiektu w jego dotychczasowej postaci np.: zmian obiektu
powierzchniowego na liniowy
•
poprawiające widoczność
- powiększenie - zwiększenie rozmiaru istotnego obiektu w celu
zachowania go na mapie
- rozwiązywanie konfliktów – wykrywanie między obiektami a
następnie przesuwanie lub zmiana wymiarów mniej znaczących,
Charakter generalizacji ma odmienny charakter w modelu wektorowym oraz
modelu rastrowym. Generalizacja wektorowa kartograficzna jest pomyślana głównie
jako narzędzie do upraszczania i wygładzania obiektów liniowych. Zagadnienie to jest
istotne gdyż należy pamiętać, iż większość symboli znajdujących się na typowej mapie
topograficznej stanowią linie. W modelu rastrowym generalizacja prowadzona jest na
atrybutach, w przeciwieństwie do zapisu wektorowego, gdzie przetwarzaniu podlega
informacja geometryczna
1.8. Źródła danych
Jedną z kluczowych cech systemów GIS jest ich zdolność do przyjmowania
danych z różnych źródeł, w różnych formatach i zbieranych w różnym czasie. W
zależności od rodzaju danych mamy odmienne metody pozyskiwania danych.
22
1.8.1. Dane wektorowe
Digitalizacja
W celu wprowadzenia danych wektorowych do bazy danych konieczne jest
podanie wartości współrzędnych obiektów oraz informacja o ich topologii. Źródłem
takiej informacji jest najczęściej mapa analogowa, a proces kwantowania danych
nazywany jest digitalizacją. W procesie digitalizacji wykorzystuje się urządzenie
elektromagnetyczne – digitizer.
Proces digitalizacji rozpoczyna się od umocowania mapy na specjalnym pulpicie.
Kolejną czynnością jest wprowadzenie punktów kontrolnych mapy, które dają
możliwość przeliczenia współrzędnych digitizera na współrzędne kartograficzne. Ta
operacja nazywana jest rejestracją mapy. Do rejestracji mapy używana jest empiryczna
funkcja wielomianu, która pozwala określić różnicę skali, przesunięcie, obrót obydwu
układów współrzędnych prostokątnych. Ten typ zależności to transformacja afiniczna
f
dv
cu
y
e
Bv
au
x
+
+
=
+
+
=
gdzie : x, y – współrzędne kartograficzne
v, u – współrzędne digitizera
Do rozwiązania powyższego układu równań wystarczą trzy punkty kontrolne, jednak
gdy zachodzi potrzeba uzyskania informacji o zniekształceniu mapy, wprowadza się
więcej punktów, parametry równań oblicza metodą najmniejszych kwadratów.
W trakcie procesu digitalizacji dane przesyłane są do komputera przez łącze szeregowe,
po czym zapisywane są na dysku i ewentualnie umieszczane w bazie danych.
Obecnie stosowane jest digitalizacja półautomatyczna oraz ręczna.
Cyfrowe instrumenty geodezyjne
Obecnie w geodezji do określenia położenia punktu używa się pomiarów kątów
i odległości we współrzędnych biegunowych, które później przeliczane są na
współrzędne wektorowe. Wykorzystanie instrumentów opto-elektronicznych pozwoliło
na uzyskanie znacznie dokładniejszego niż w procesie digitalizacji rysunku
analogowego.

23
Transfer danych wektorowych
Dane mogą być również pozyskiwane z zewnętrznej bazy danych, z której
przenosimy (importujemy) dane do systemu geoinformacyjnego.
W wielu krajach utworzono narodowe agencje kartograficzne, które zajmują się
opracowaniem cyfrowych map topograficznych.
Obecnie istnieje kilka dużych zbiorów map cyfrowych, z których najbardziej znane to:
GRID – opracowanie w małych skalach, które obejmuje cały świat
WDB I i II – opracowanie obejmujące świat w skali od 1:4 mln 1:1 mln
DCW – zbiór map świata w skali 1:1 mln i 1:2 mln, zajmuje około 1,7 GB
pamięci na dyskach CD-ROM
W Polsce również powstają zbiory wektorowo zapisanych danych przestrzennych.
Państwowy Instytut Geologiczny opracowuje obecnie cyfrową wersję szczegółowej
mapy geologicznej Polski w skali 1:50000.
Przy przenoszeniu danych pewnym problemem jest niekompletność danych (np.: brak
informacji o topologii) oraz różnorodność formatów, w jakich są one zapisywane.
Podejmowane są próby ujednolicenia tych formatów przez przyjęcie jednakowej
struktury pliku i modelu danych, co znacznie ułatwi wymianę i transmisję danych.
Obecnie istnieje bardzo wiele formatów wymiany danych wektorowych, jednak
najpopularniejsze to: NTF, DXF, DIGEST, SDTS, ARC, EPS oraz PLT.
Redakcja danych wektorowych
Podczas digitalizacji bardzo często powstają błędy, które to mogą zostać później
poprawione. Wykonuje się to przy pomocy programu digitalizacji, z odwołanie do
podkładu kartograficznego, obrazu rastrowego lub ekranu zawierającego wprowadzone
linie. Jako urządzenie wskazujące może być użyta myszka lub celownik digitizera.
Globalne wyznaczanie pozycji
Najnowszą metodą pozyskiwania danych jest pomiar GPS(ang. Global
Positioning System
). Dzięki zastosowaniu 29 sztucznych satelitów(dane na dzień

24
24.I.2002), dysponując odpowiednim odbiornikiem można określić pozycję obiektu(3
współrzędne).Jednak ze względów bezpieczeństwa właściciel satelitów(
Departament
Obrony USA) wprowadził pewne przekłamanie w dokładności – około 100 m. Jednak
stosując dwa odbiorniki oraz odpowiednie metody pomiarowe można uzyskać znacznie
lepszą dokładność do 5mm(dla tzw. Odbiorników geodezyjnych) oraz 20 cm – 5 m (dla
odbiorników popularnych).Dzięki odpowiedniemu oprogramowaniu istnieje możliwość
przeniesienia wyników pomiarów do bazy SIP.
1.8.2. Dane rastrowe
Skanowanie
Jedną z najpopularniejszych metod pozyskiwania danych rastrowych przez
zmianę obrazu analogowego na cyfrowy przy użyciu skanera jest skanowanie. W
skanerze obraz tworzony jest przez szereg elementów fotoczułych tworzących linię,
która systematycznie rejestruje intensywność światła odbitego od oryginalnego rysunku.
Cecha niekorzystną skanerów jest fakt, że rejestrują wszystko co jest w ich polu
widzenia, a więc nie potrafią selektywnie wczytywać np.: tylko przebieg dróg.
Teledetekcja
Zajmuje się bez-kontaktowym pozyskiwaniem, przetwarzaniem i interpretacją
informacji o obiektach, zjawiskach i procesach zachodzących na powierzchni Ziemi.
Najpopularniejszą techniką teledetekcji jest fotografia lotnicza ze względu na łatwość
wykonywania zdjęć lotniczych, a także stosunkowo niskie koszty. Najczęściej
wykonuje się zdjęcia czarno-białe na filmie panchromatycznym, głównie na potrzeby
fotogrametrii, do sporządzania różnoskalowych map topograficznych. Zdjęcia lotnicze
wykorzystuje się ponadto do badań budowy geologicznej terenu, obliczania wielkości
przepływów w rzekach, obliczania zasobów drewna w lasach, obliczania pogłowia
zwierząt dziko żyjących, szacowania wielkości zbiorów upraw rolnych, wyznaczania
prędkości ruchu pojazdów itp..
W zdalnych metodach badania środowiska wykorzystuje się również promieniowanie
podczerwone, w zakresie podczerwieni fotograficznej oraz część długofalowego
promieniowania podczerwonego. Promieniowanie to można rejestrować na
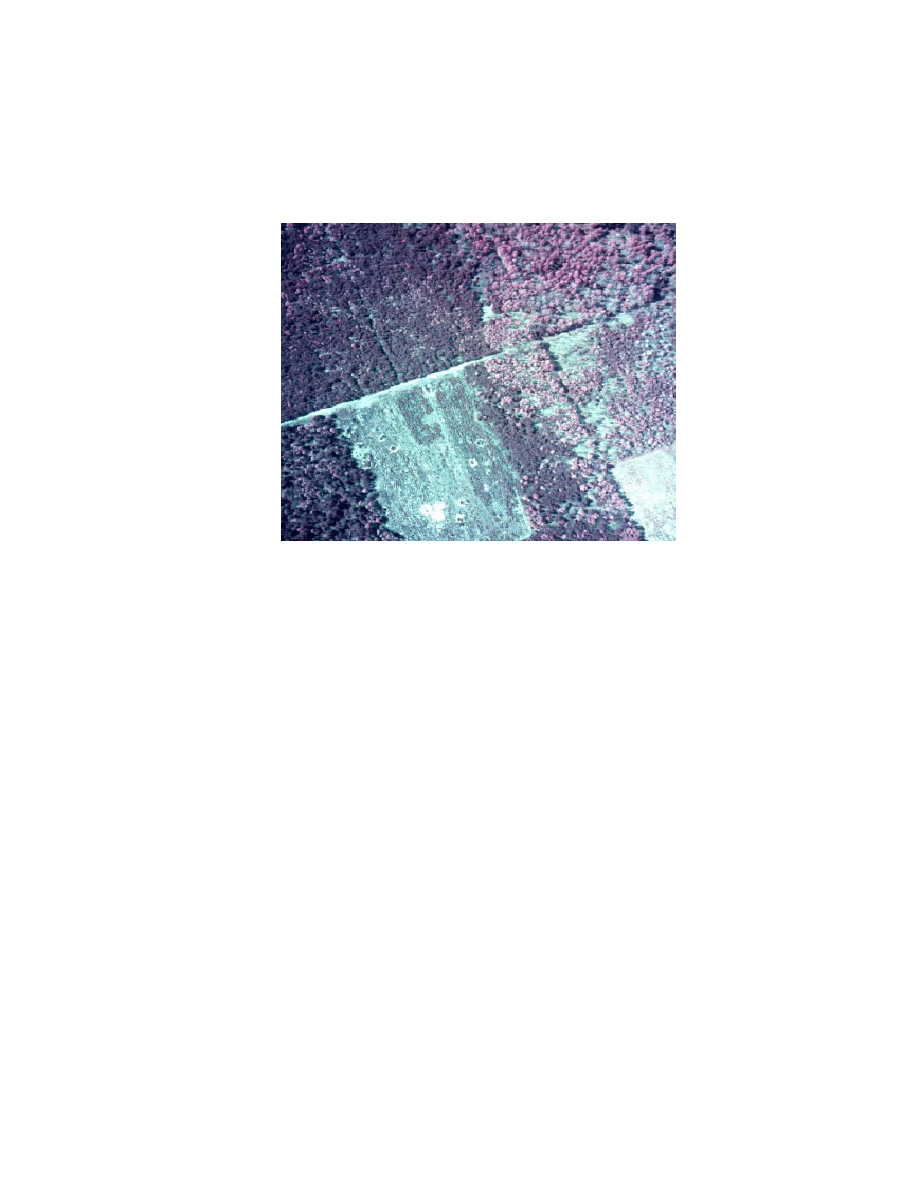
25
odpowiednio czułym filmie fotograficznym. W fotografii lotniczej fotografia w
podczerwieni jest wykorzystywana do badania szaty roślinnej, rejestrowanej na
zdjęciach w zróżnicowanej tonacji oraz do badania zasobów i jakości wód.
Rysunek 6. Barwne zdjęcie lotnicze w podczerwieni. Przedstawia strukturę
wiekową i gatunkową drzewostanów oraz jakość upraw leśnych.[30]
W procesie poznawania obiektów wykorzystywane jest długofalowe promienio-
wanie podczerwone, emitowane przez te obiekty. Analiza tego rodzaju promieniowania
elektromagnetycznego pomaga w uzyskaniu wiadomości o obiektach i zjawiskach
zachodzących na powierzchni Ziemi i jej wierzchniej warstwie.
Programy interpolacji
Jako źródło danych rastrowych mogą być również użyte pliki zawierające
wartości punktów węzłowych w siatce interpolacji. Wartości te tworzą macierze, dzięki
czemu mogą być potraktowane jako piksele obrazu cyfrowego, jednak najczęściej
konieczna jest zmiana uporządkowania macierzy do układu współrzędnych ekranu.
Transfer danych rastrowych
Podobnie jak w przypadku danych wektorowych, dane rastrowe mogą być
wczytane z zewnętrznych źródeł. W procesie wymiany danych rastrowych potrzebna

26
jest standaryzacja formatu, która jest znacznie łatwiejsza niż przy danych wektorowych.
Istnieje wiele formatów wymiany danych, są wszystkie spotykane formaty graficzne
takie jak: GIF, JPG, BMP. W Polsce istnieje kilka zbiorów rastrowych danych
przestrzennych, które można wykorzystać jako pomocnicze warstwy przestrzenne.

27
Rozdział 2. Mapy numeryczne
2.1. Definicja mapy numerycznej
Klasyczna mapa jest powszechnie stosowanym modelem analogowym
ukazującym obiekty przestrzenne. Stanowi ona pewne kartograficzne uogólnienie
rzeczywistości, jej dokładność i rozdzielczość zależą od zastosowanej skali
opracowania. Tradycyjna, redagowana w postaci graficznej, mapa jest trudna do
aktualizacji i automatycznego wyszukiwania danych. Wraz z rozwojem techniki
informatycznej powstała idea redagowania mapy w komputerze, czyli tworzenia mapy
numerycznej.
Mapę numeryczną można zdefiniować jako zbiór danych numerycznych, który
dzięki zastosowaniu specjalnych algorytmów i odpowiednich środków technicznych
umożliwia przedstawienie mapy w formie graficznej. Dane zawarte w systemie mogę
być selekcjonowane, lub grupowane, co daje możliwość, na podstawie jednego zestawu
danych, różnorodne (pod względem skali i treści) graficzne opracowanie tematyczne.
Do wykonania mapy numerycznej konieczne jest zebranie i zapisanie w bazie
danych systemu danych charakteryzujących położenie każdego elementu
sytuacyjnego(dwie lub trzy współrzędne) oraz zdefiniowania odpowiedniego schematu
połączeń punktów tworzących obiekty(np.: kolejność graniczników tworzących
działkę). Najczęściej stosowany jest prosty model wektorowy zapisu położenia
obiektów z wykorzystanie elementów punktowych i liniowych. Dla niektórych potrzeb
(np.: ewidencji gruntów) wydzielane są obiekty powierzchniowe, system umożliwia
emisję informacji o ich polu powierzchni, niekiedy także o cechach z nimi związanych.
Mapa numeryczna nie jest bazą danych informacji przestrzennej, ale może być do takiej
postaci przekształcona.
W Polsce zasady budowy mapy numerycznej, która posiada cechy dokumentu
formalno-prawnego regulują instrukcje techniczne wprowadzone przez Głównego
geodetę Kraju:
„System Informacji o Terenie, podstawowa mapa kraju, Instrukcja K-1”
„System informacji o terenie, Standard Wymiany Informacji Geodezyjnej”
28
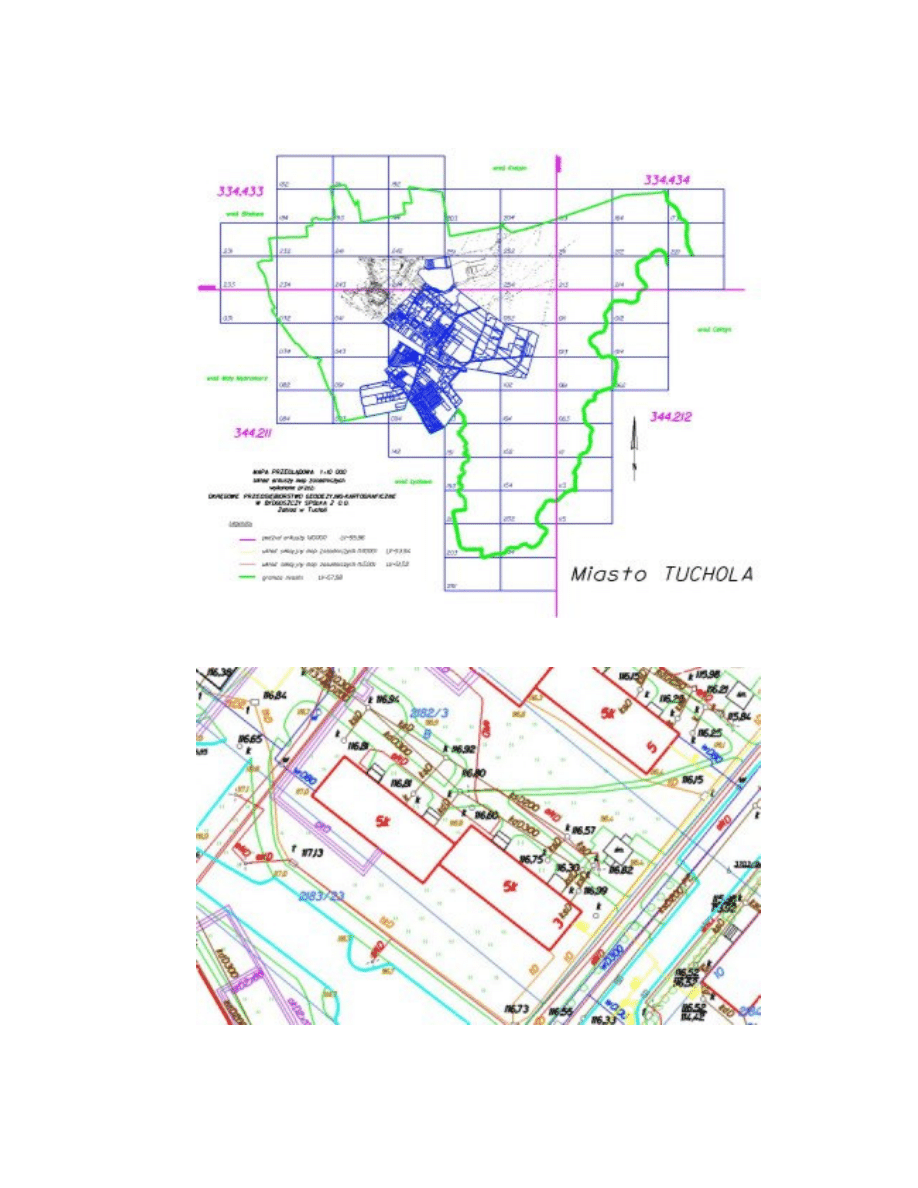
Na rysunku 7 i 8 znajduje się przykład mapy numerycznej.
Rysunek 7. Mapa numeryczna miasta Tuchole. [23]
Rysunek 8. Fragment al. LOP w mieście Tuchole; widoczna jest także sieć uzbrojenia
podziemnego.[23]

29
2.2. Pojęcia związane z mapami
Przy mapach numerycznych spotykamy się z szeregiem pojęć. Poniżej
zostaną przedstawione najważniejsze terminy konieczne do zrozumienia istoty map.
2.2.1. Obiekty i atrybuty
Obiekt to składnik warstwy. Pojedynczym obiektem może być np.: las.
Obiekt to najmniejszy element, jaki można wyróżnić na mapie. Jest symbolicznym
przedstawieniem pewnego elementu ze świata rzeczywistego. Można go przedstawić za
pomocą symbolu graficznego lub figury geometrycznej. Na każdy obiekt składa się co
najmniej jeden punkt o zadanych współrzędnych, dzięki czemu można obiekt
umiejscowić w przestrzeni(czyli dokonać georeferencji). Informacja opisowa na temat
każdego obiektu przetrzymywana jest w bazie danych.
Każdy obiekt posiada pewne elementy opisujące go, czyli atrybuty. Każdy
obiekt można opisać dowolną ilością informacji dowolnego typu. Jest to bardzo ważna
własność, która odróżnia zwykłe programy graficzne od SIP.
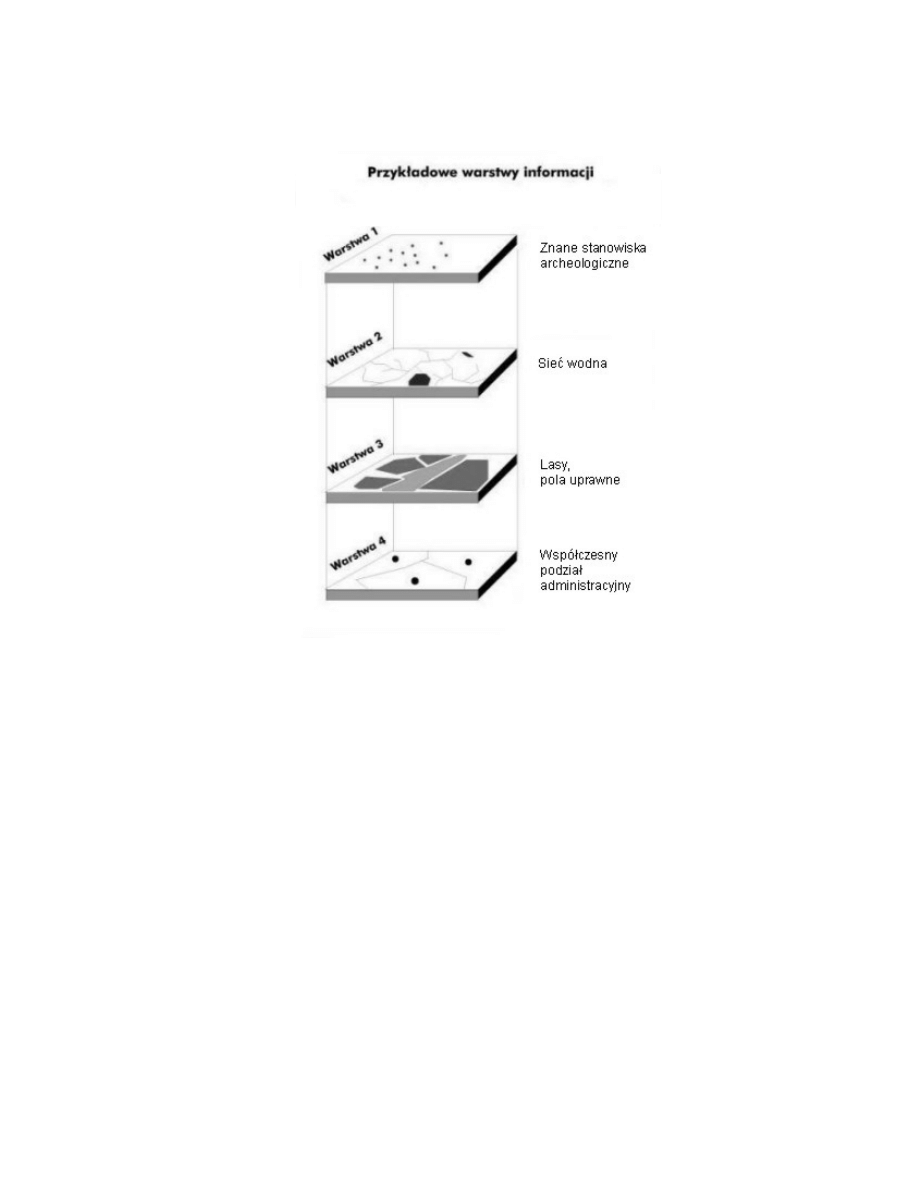
2.2.2. Warstwa mapy
Idea mapy numerycznej polega m.in. na tym, iż każdy rodzaj informacji
znajduje się na osobnej warstwie. Warstwa jest więc pojęciem hierarchizującym
strukturę zapisu mapy. Zazwyczaj warstwa obejmuje obiekty mające wspólne cechy.
Np.: warstwa nosząca nazwę Budynki zawiera dane graficzne oraz opisowe na temat
wszystkich budynków(i tylko budynków). Każda warstwa oprócz atrybutów opisowych
posiada także grupę parametrów określających jej wygląd, czyli: kolor, grubość i typ
linii, typ wypełnienia polygonów itp.
Najczęściej przypisanie poszczególnych obiektów do warstw mapy odbywa się już w
procesie digitalizacji.
Warstwy mogą stanowić oddzielne mapy np.: można je oddzielnie wyświetlać czy
nawet drukować. Po nałożeniu na siebie warstw otrzymujemy zupełnie inną, nową
informację. Przykładem może być sytuacja, w której warstwa z samymi punktami
czerpania wody niewiele mówi, jednak gdy do tego dołączymy dodatkowo warstwę
dróg i cieków, pozwoli to na znacznie dokładniejszą orientację, przeprowadzenie
analizy i wyciągniecie wniosków.
30
Proces tworzenia warstw jest bardzo istotne w procesie budowania i analizowania map.
Rysunek 9. Rozwarstwienie informacji przestrzennej.[30]
2.2.3. Mapa tematyczna
Mapa tematyczna przedstawiająca wybrane zagadnienia na tle podkładu
kartograficznego. Główny temat, którym mogą by np.: siedliska leśna – map
siedliskowa, dominuje a pozostałe elementy(topograficzne czy też administracyjne) są
ukazane jako tło mające pełnić funkcje orientacyjne. Mapy tematyczne dzielą się na
wiele grup, które zostały przedstawione w punkcie 2.3 Klasyfikacja map.
2.2.4. Skala mapy
Jest to stosunek liczbowy przedstawiający wielkość zmniejszenia odległości
na mapie względem rzeczywistych odległości w terenie. Skala mapy zapisywana jest w
postaci ułamka np.: 1:5000 razy większa (skala mapy jest tym większa, im mianownik
ułamka jest mniejszy).
31
Skalę mapy można przedstawić za pomocą podziałki mapy lub w postaci mianowanej,
np.: 1 cm na mapie – 5km w terenie.
2.2.5. Oznaczenia obiektów na mapach
Na mapach stosowane są dwojakiego rodzaju oznaczenia:
•
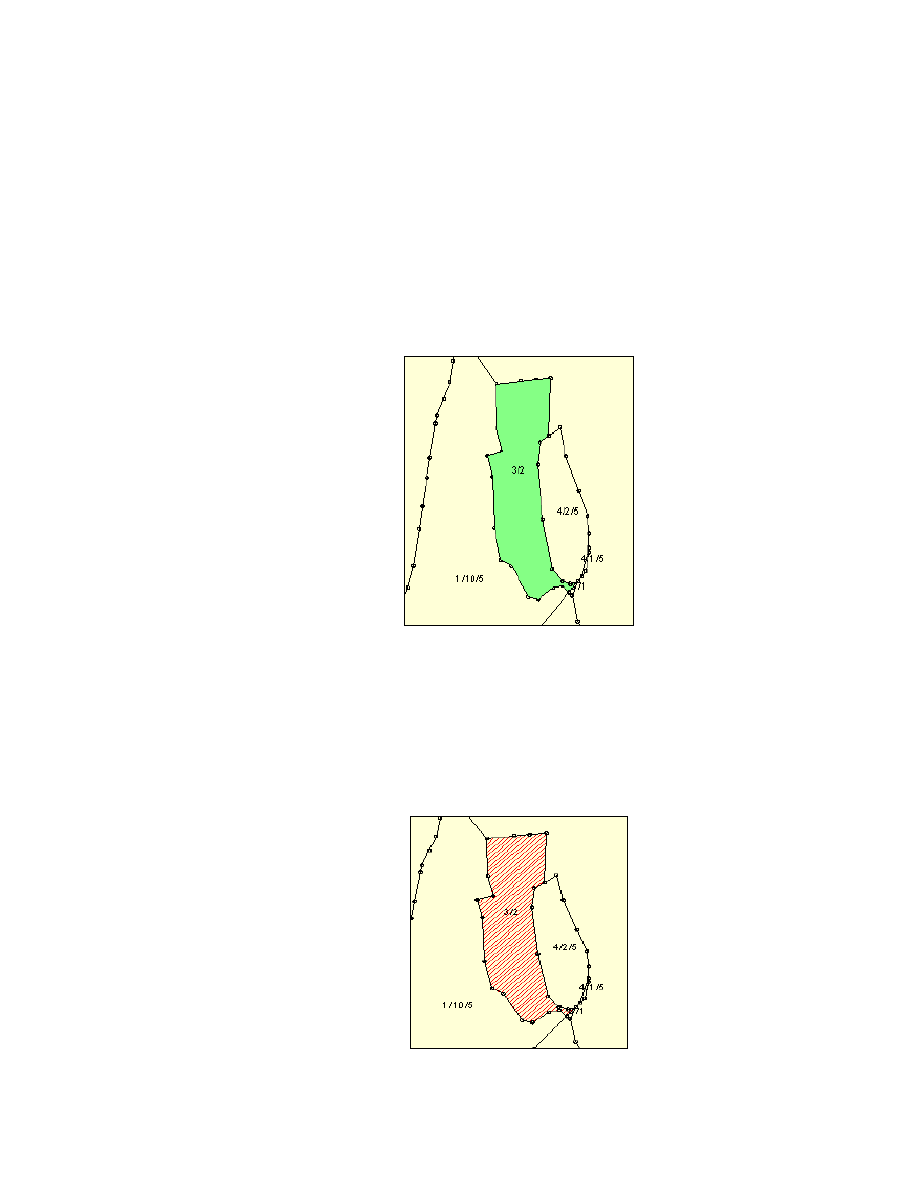
wypełnienie - nadanie wnętrzu obiektu wybranego koloru. Bardzo
często stosowane przy funkcjach klasyfikujących obiekty na mapie.
Rysunek 10. Wypełnienie
•
szrafura, deseń, kreskowanie - kreski równoległe lub przecinające się,
albo inny dowolny deseń stosowany w kartografii do elementów
powierzchniowych na mapach tematycznych
Rysunek 11. Szrafura.

32
2.2.6. Jednostki ewidencyjne
Arkusz – fragment mapy mieszczący się na karcie formatu A1 wytyczony po granicach
naturalnych.
Obręb – fragment mapy składający się z kilku arkuszy.
Gmina – jednostka terytorialna obejmująca pewną liczbę wsi, niewielkie miasto lub
część dużego miasta. Składa się z obrębów.
2.3. Klasyfikacja map
Najczęściej stosowany podział map odnosi się do ich skali. Zazwyczaj mapy
dzielone są na wielko-, średnio- i małoskalowe. Jednak klasyfikacja ta nie jest
jednoznaczna, ponieważ w różnych dziedzinach funkcjonują różne zakresy skal (skale
map w kartografii i geodezji są różne). Z tego powodu wprowadzono inny rodzaj
podziału; podział ze względu na treść mapy.
Pełna klasyfikacja map ze względu na treść znajduje się w załączniku A.
2.4. Znaki kartograficzne
Znaki kartograficzne są niezwykle istotne przy procesie tworzenia i czytania
mapy. Dzięki nim można przedstawić przedmioty i zjawiska nawet takie, które nie mają
wizualnego obrazu (np.: klimat, temperatura) lub są zbyt małe w zastosowanym
pomniejszeniu.
Definicja znaków kartograficznych przedstawia się w następujący sposób:
„Znaki kartograficzne – są to umowne graficzne oznaczenia stosowane na mapach w
celu przedstawienia rzeźby terenu (warstwice, szrafury), tzw. szczegółów
sytuacyjnych(sygnatury) i innych elementów.”
2
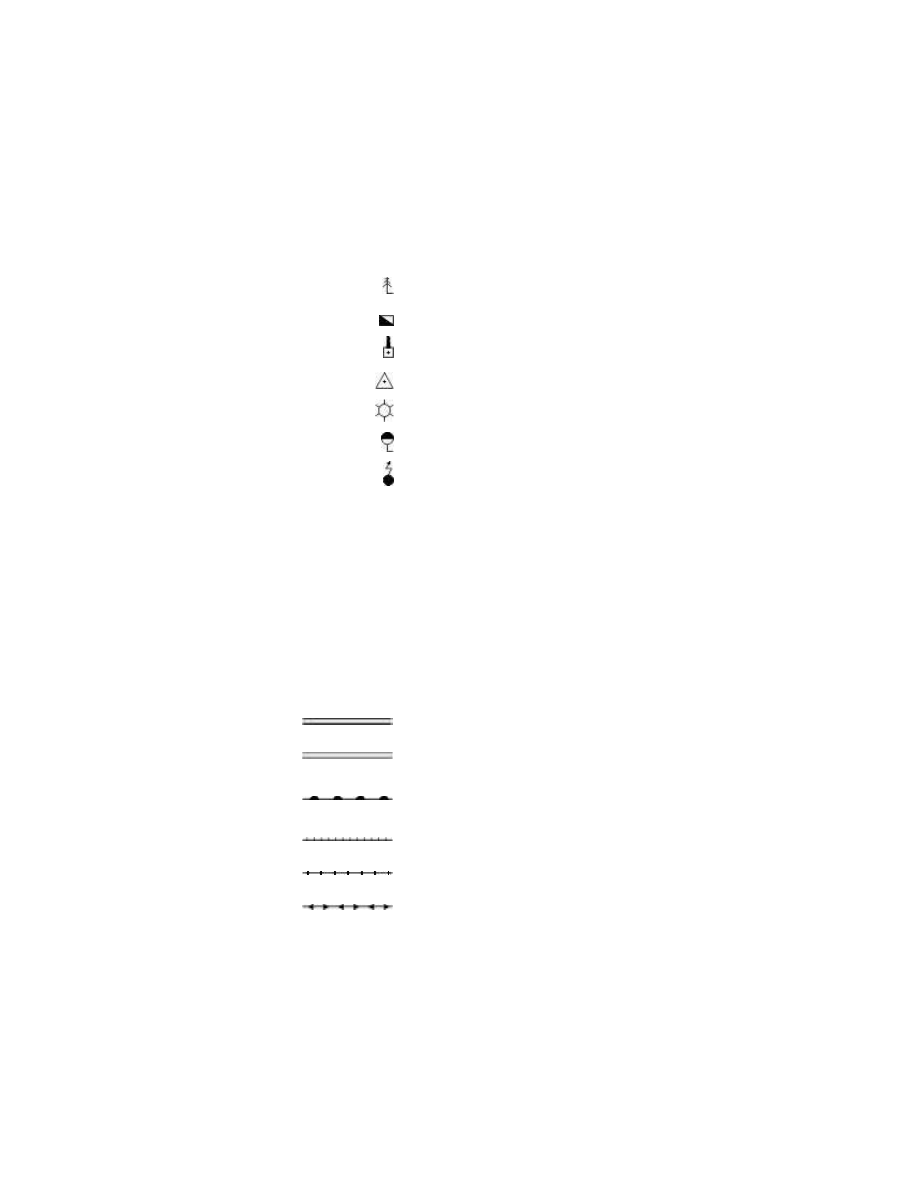
Możemy wyróżnić następujące rodzaje znaków kartograficznych:
•
Znaki punktowe (np.: punkty wysokości)
•
Znaki liniowe (np.: rzeki, drogi)
•
Znaki powierzchniowe (np.: lasy)
•
Znaki objaśniające
2
za:
Encyklopedia multimedialna FOGRA - 1999
33
Pierwsza grupa – znaki punktowe – obrazuje elementy, których rozmiar w naturze jest
tak niewielki, że nie da się ich zobrazować w skali map, gdyż byłyby na niej
niewidoczne. Znaki z tej grupy używane są do przedstawiania samotnych drzew,
drogowskazów. Poniżej znajdują się przykładowe znaki z tej grupy:
- samotne drzewo (iglaste)
- fabryka bez komina
- fabryka z kominem
- punk triangulacyjny
- młyn wodny
- stacja benzynowa
- transformator
Do grupy znaków liniowych zaliczamy wszystkie te znaki, które przy zastosowaniu
rzutu poziomego dają linię. W skali mapy nie jest możliwe wierne oddanie szerokości
obiektu, z tego względu przyjęto, że oś znaku odpowiada rzeczywistemu
umiejscowieniu obiektu w warunkach rzeczywistych. Znakami liniowymi opisujemy
drogi, rzeki, linie energetyczne, telefoniczne.
- droga gruntowa utrzymana
- kanał o szerokości pow. 10 m nie
dający przedstawić się w skali mapy
- ogrodzenie z prętów żelaznych lub
siatki
- ogrodzenie kamienne lub murowane o
- wysokości do 1 m
- linia telefoniczna lub telegraficzna
- linia wysokiego napięcia na słupach
drewnianych
Z kolei znaki powierzchniowe(konturowe) opisują obiekty, które możemy przedstawić
w skali mapy, czyli np.: lasy, bagna. Kształt obiektów na mapie odpowiada dokładnemu
kształtowi w terenie.
34
- sad z drzewami owocowymi
- łąka
- wysokie trawy
- kamieńsko (gołoborze)
- teren bagienny
- las rzadki
Ostatnie grupa to
znaki objaśniające
. Znaki te nie wyst
ę
puj
ą
samodzielnie, s
ą
one
uzupełnieniem dla znaków przedstawionych powy
ż
ej. Przykłady takich znaków to:
numer działki, rodzaj granicznika, nazwa ulicy.
2.5. Odwzorowania kartograficzne
Zasadnicz
ą
cech
ą
ka
ż
dej mapy jest jej kartometryczno
ść
. Własno
ść
ta
oznacza, i
ż
obraz mapy mo
ż
e by
ć
u
ż
ywany do przeprowadzenia pomiarów w celu
okre
ś
lenia cech ilo
ś
ciowych ukazywanych zjawisk oraz obiektów(liczebno
ść
,
odległo
ść
). Odró
ż
nia to map
ę
od planów, które zazwyczaj nie maj
ą
takiej własno
ś
ci.
Kartometryczno
ść
mapy uzyskujemy przez zastosowanie
ś
ci
ś
le okre
ś
lonych formuł
matematycznych odzwierciedlaj
ą
cych brył
ę
Ziemi na płaszczy
ź
nie mapy.
Zestaw tych reguł nosi nazw
ę
odwzorowania kartograficznego
. Czyli, odwzorowanie
kartograficzne polega na przeniesieniu poło
ż
enia punktów z powierzchni odniesienia,
któr
ą
mo
ż
e by
ć
kula ziemska lub elipsoida ziemska na płaszczyzn
ę
mapy z
zastosowaniem okre
ś
lonych reguł matematycznych. W praktyce jest to przeniesienie
siatki geograficznej, która słu
ż
y jako podstawa okre
ś
lenia poło
ż
enia punktów na Ziemi.
Obraz siatki geograficznej przedstawiony na mapie przy zachowaniu zasad
odwzorowania tworzy siatk
ę
kartograficzn
ą
. Siatk
ę
tak
ą
mo
ż
emy uzyska
ć
w wyniku
przelicze
ń
matematycznych, które to okre
ś
laj
ą
poło
ż
enie punktów przeci
ę
cia
wybranych południków i równole
ż
ników, albo dzi
ę
ki zastosowaniu rzutowania
geometrycznego siatki geograficznej bezpo
ś
rednio na płaszczyzn
ę
lub figur
ę
daj
ą
c
ą
si
ę
rozwija
ć
na płaszczy
ź
nie np.: sto
ż
ek.

35
Istnieje wiele odwzorowa
ń
. Ka
ż
de posiada swoje zalety i wady, wynikaj
ą
ce przede
wszystkim z wyst
ę
powania zniekształce
ń
kartograficznych.
Ż
adne z dost
ę
pnych
odwzorowa
ń
nie oferuje mo
ż
liwo
ś
ci wiernego przedstawienia odległo
ś
ci na całej
mapie. Istniej
ą
odwzorowania, które zachowuj
ą
odległo
ś
ci tylko wzdłu
ż
pewnych
kierunków, o których b
ę
dzie mowa dalej.
2.5.1. Rodzaje odwzorowań kartograficznych
Istnieje bardzo wiele rodzajów odwzorowa
ń
. Poni
ż
ej przedstawi
ę
te
najbardziej typowe i najszerzej wykorzystywane.
Mapa wykonana jest w pewnym odwzorowaniu, przyj
ę
tym dla danego obszaru i
rodzaju mapy. Proces przekształcenia powierzchni elipsoidy na płaszczyzn
ę
mapy
wprowadza zmian
ę
relacji geometrycznej odwzorowywanego obrazu. Zniekształceniu
mog
ą
ulec k
ą
ty, odległo
ś
ci, powierzchnie, kierunki.
Istniej
ą
odwzorowania, które zachowuj
ą
te wielko
ś
ci niezmienione, s
ą
to:
•
równopolowe –
zachowuje warto
ść
pól powierzchni. Wykorzystywane jest do
kartograficznych opracowa
ń
drobnoskalowych np.: małoskalowe mapy
geograficzne
•
konforemne
– warto
ść
k
ą
tów pomi
ę
dzy kierunkami pozostaje niezmieniona.
Odwzorowanie
stosowane
do
opracowa
ń
map
wielkoskalowych,
ś
rednioskalowych i map nawigacyjnych.
•
równoodległościowe –
zachowuje niezmienione warto
ś
ci pomi
ę
dzy punktami
poło
ż
onymi np.: na tym samym południku, równole
ż
niku. Nie istnieje takie
odwzorowanie, które zachowuje tak
ą
sam
ą
skal
ę
pomi
ę
dzy dwoma dowolnie
wybranymi punktami odwzorowywanego obszaru.
•
azymutalne –
zachowuje kierunki.
Kolejn
ą
metod
ą
podziału odwzorowa
ń
jest klasyfikacja ze wzgl
ę
du na geometryczn
ą
interpretacj
ę
:
•
azymutalne
– powierzchnia odwzorowania jest płaska
•
walcowate –
odwzorowanie na boczn
ą
powierzchni
ę
walca
•
stożkowe –
na płaszczyzn
ę
sto
ż
ka
36
Ka
ż
de z powy
ż
szych odwzorowa
ń
, mo
ż
na podzieli
ć
ze wzgl
ę
du na orientacj
ę
powierzchni odwzorowuj
ą
cej wzgl
ę
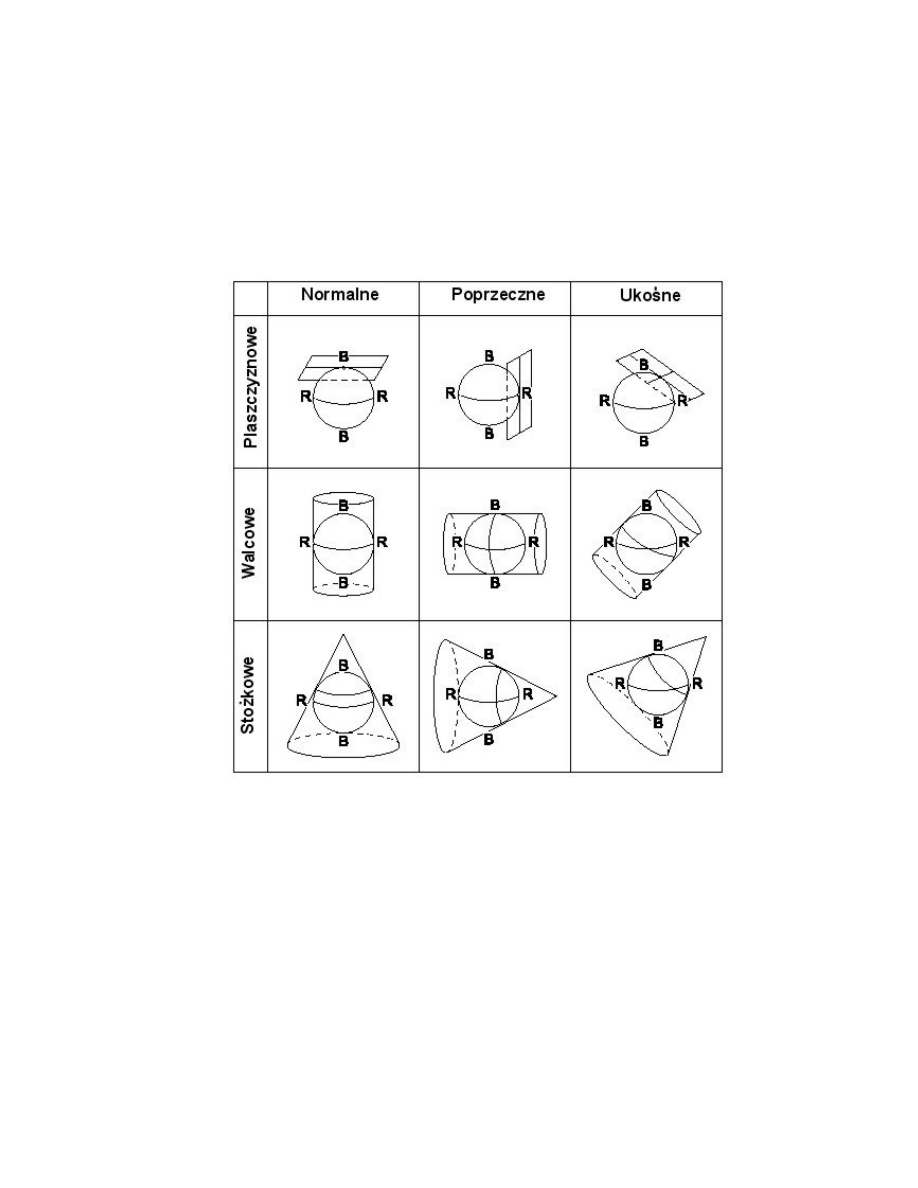
dem powierzchni elipsoidy na (Rysunek 12):
•
biegunowe
(normalne)
•
równikowe
(poprzeczne)
•
horyzontalne
(uko
ś
ne)
Rysunek 12. Kształt i orientacja powierzchni odwzorowujących.[4]
S
ą
równie
ż
odwzorowania, które nie zachowuj
ę
ż
adnych wymiarów. Stanowi
ą
one
rodzaj kompromisu mi
ę
dzy wyborem zniekształce
ń
k
ą
tów, odległo
ś
ci i powierzchni.
Wygl
ą
d powierzchni Ziemi jest wówczas zniekształcony w pewnym umiarkowanym
stopniu.
2.6. Układy współrzędnych geodezyjnych
37
Układ współrz
ę
dnych okre
ś
laj
ą
dwa główne elementy; elispoida, okre
ś
lona tak,
aby odzwierciedla
ć
wła
ś
ciwo
ś
ci geometryczno-fizyczne geoidy w wybranym obszarze
ziemi oraz odwzorowanie kartograficzne powierzchni przyj
ę
tej elipsoidy na
płaszczy
ź
nie
Dla obszaru Polski zdefiniowano dwa systemy współrz
ę
dnych geodezyjnych w oparciu,
o które wykonywano po roku 1945 mapy topograficzne:
•
PUŁKOWO’42
– wykorzystuje elipsoid
ę
Krasowskiego
•
EURE
F
-89
– działa na geocentrycznej elipsoidzie GRS’80
Powy
ż
sze systemy s
ą
podstaw
ą
stosowanych w Polsce układów współrz
ę
dnych.
Na systemie PUŁKOWO’42 oparte s
ą
nast
ę
puj
ą
ce układy:
•
1942 –
układ płaskich współrz
ę
dnych prostok
ą
tnych. Zastosowano w nim
odwzorowanie Gaussa-Krugera dla stref południkowych. Układ ten
przeznaczony jest dla map wieloskalowych (skala ponad 1:5000), wykazuje
maksymalne zniekształcenie odwzorowawcze na granicy stref rz
ę
du 15 cm/km.
oraz dla skla mniejszych ni
ż
1:5000, gdzie maksymalne zniekształcenie na
granicy stref wynosi 59cm/km.
•
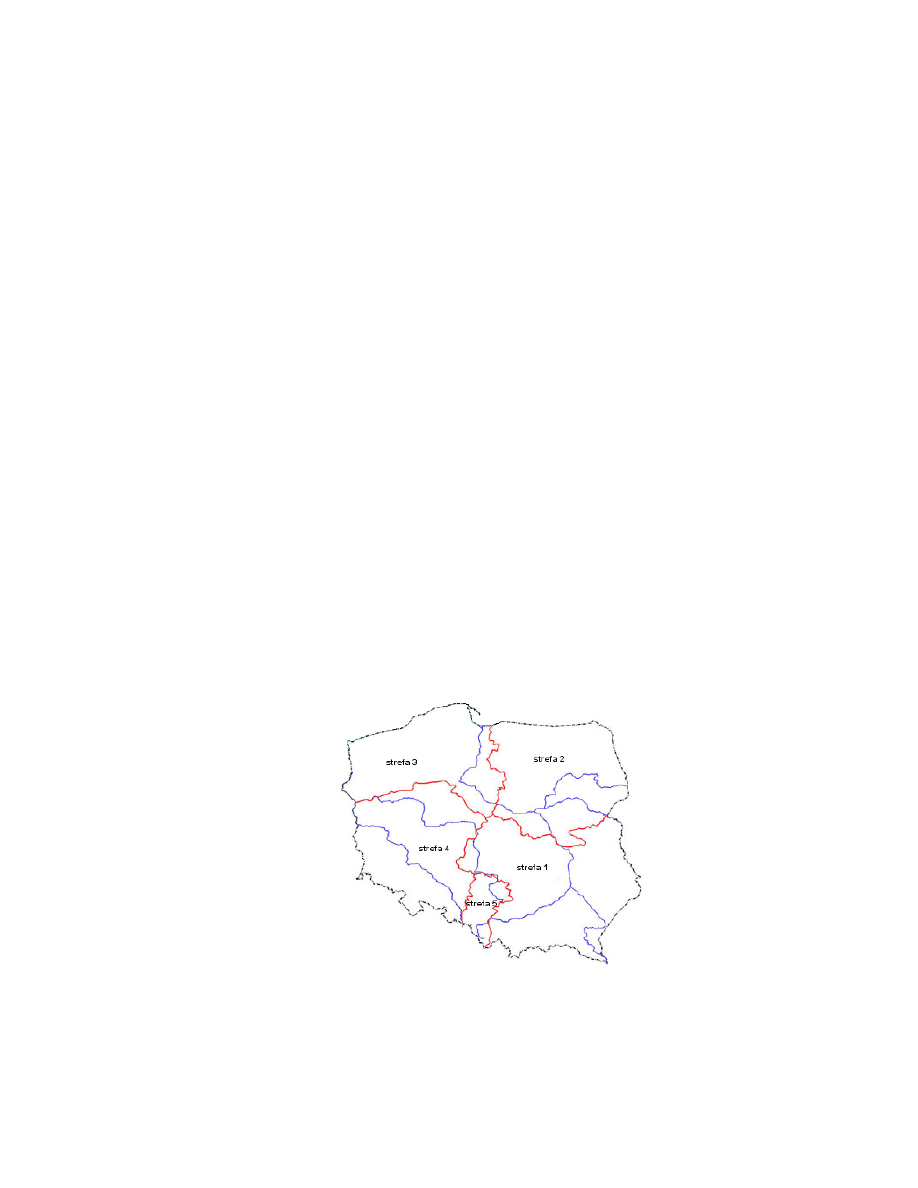
1965
– układ współrz
ę
dnych płaskich prostok
ą
tnych wprowadzony w 1968
roku. Przeznaczony głownie dla map wieloskalowych. Obszar Polski został tu
podzielony na 5 stref:
Rysunek 13. Podział na strefy według 1965
•
GUGiK-80 -
układ
płaskich współrz
ę
dnych prostok
ą
tnych przeznaczony dla
map w małej skali 1:100000 i mniejszych. Maksymalne zniekształcenie liniowe
na granicach kraju wynosi 93cm/km. Układ ten został zastosowany jedynie przy

38
opracowaniu wydawanej w latach 1980-1984 topograficznej mapy Polski w
skali 1:100000.
Na systemie EUREF-89 oparte s
ą
nast
ę
puj
ą
ce układy:
•
1992 –
układ płaskich współrz
ę
dnych prostok
ą
tny przeznaczony dla map
małoskalowych i
ś
rednioskalowych. Wykorzystuje si
ę
w nim kartograficzne
równok
ą
tne odwzorowanie Gaussa-Krugera.
Warto
ś
ci zniekształce
ń
odwzorowawczych mieszcz
ą
si
ę
w zakresie od –70
cm/km na południku osiowym do 91cm/km na wschodniej granicy Polski.
•
2000 -
układ płaskich współrz
ę
dnych prostok
ą
tny przeznaczony dla map
wieloskalowych. Równie
ż
wykorzystuje odwzorowanie Gaussa-Krugera.
Zniekształcenie liniowe zawiera si
ę
w zakresie od –7.7 cm/km na południku
osiowym do 7 cm/km na brzegu ka
ż
dej strefy.
•
UTM –
mi
ę
dzynarodowy, wojskowo-nawigacyjny układ współrz
ę
dnych
płaskich stosuj
ą
cy elipsoid
ę
WGS84 i uniwersalne poprzeczne odwzorowanie
Mercator. W Polsce wykorzystywany od pocz
ą
tku lat 90 do opracowywanie
map zgodnych ze standardami NATO.
2.7. Mapa rastrowa a mapa wektorowa
Najcz
ęś
ciej mapy numeryczne realizowane s
ą
w postaci wektorowej oraz
rastrowej. Ka
ż
da z tych metod posiada swoje wady i zalety, o których powiem nieco
szerzej.
2.7.1. Mapa wektorowa
Mapa w postaci wektorowej składa si
ę
ze zbioru obiektów opisanych
współrz
ę
dnymi w zadanym układzie współrz
ę
dnych. Reprezentacja wektorowa bardzo
dobrze nadaje si
ę
do przechowywania danych o charakterze dyskretnym, dla których
wymagana jest bardzo du
ż
a dokładno
ść
. S
ą
to np.: granice działek, ulice, budynki, sieci
elektryczne. Wektor posiada równie
ż
bardzo wa
ż
n
ą
zalet
ę
, jak
ą
jest mo
ż
liwo
ść
wyodr
ę
bnienia poszczególnych obiektów. Dzi
ę
ki temu mo
ż
na do nich podł
ą
cza
ć
informacje pochodz
ą
ce z bazy danych, co jest nie mo
ż
liwe w przypadku mapy
rastrowej.
39
Zapis w postaci wektorowej jest powszechnie u
ż
ywany w systemach CAD-owskich.
Jednak w tych systemach współrz
ę
dne wyra
ż
ane s
ą
w lokalnych jednostkach np.:
centymetrach czy calach, a nie we współrz
ę
dnych geograficznych.
Du
żą
zalet
ą
mapy wektorowe jest znacznie mniejsza obj
ę
to
ść
, ni
ż
eli mapy rastrowej
(ale zdarzaj
ą
si
ę
wyj
ą
tki) oraz skalowalno
ść
. Jako
ść
mapy wektorowej nie zale
ż
y od
skali w jakiej jest wizualizowana, w przeciwie
ń
stwie do zapisu rastrowego, gdzie
najlepsz
ą
jako
ść
uzyskujemy w skali zbli
ż
onej do oryginału.
2.7.2. Mapa rastrowa
Mapa w postaci rastrowej jest porównywalna do fotografii. Stanowi ona
siatk
ę
punktów zorganizowanych w wiersze i kolumny. Ka
ż
dy z tych punktów mo
ż
e
przyjmowa
ć
ró
ż
ne warto
ś
ci(kolory), co w rezultacie tworzy obraz. Obiekty, jakie mamy
na mapie rastrowej s
ą
nierozpoznawalne dla komputera, ale oczywiste dla u
ż
ytkownika
np. drogi, budynki. Rysunek rastrowy tak
ż
e zachowuje globalny układ współrz
ę
dnych i
mo
ż
na go przedstawia
ć
w ró
ż
nych skalach. Mo
ż
na go pomniejsza
ć
i powi
ę
ksza
ć
w
rozs
ą
dnych granicach(przewa
ż
nie od +10 do –10).
Raster wykorzystywany jest przede wszystkim w nast
ę
puj
ą
cych przypadkach:
•
gdy spotykamy si
ę
z obiektami o zmieniaj
ą
cej si
ę
powierzchni w sposób ci
ą
gły
np.: rze
ź
ba terenu
•
w celu zało
ż
enia warstwy, która b
ę
dzie stanowiła podkład dla innych warstw
wektorowych
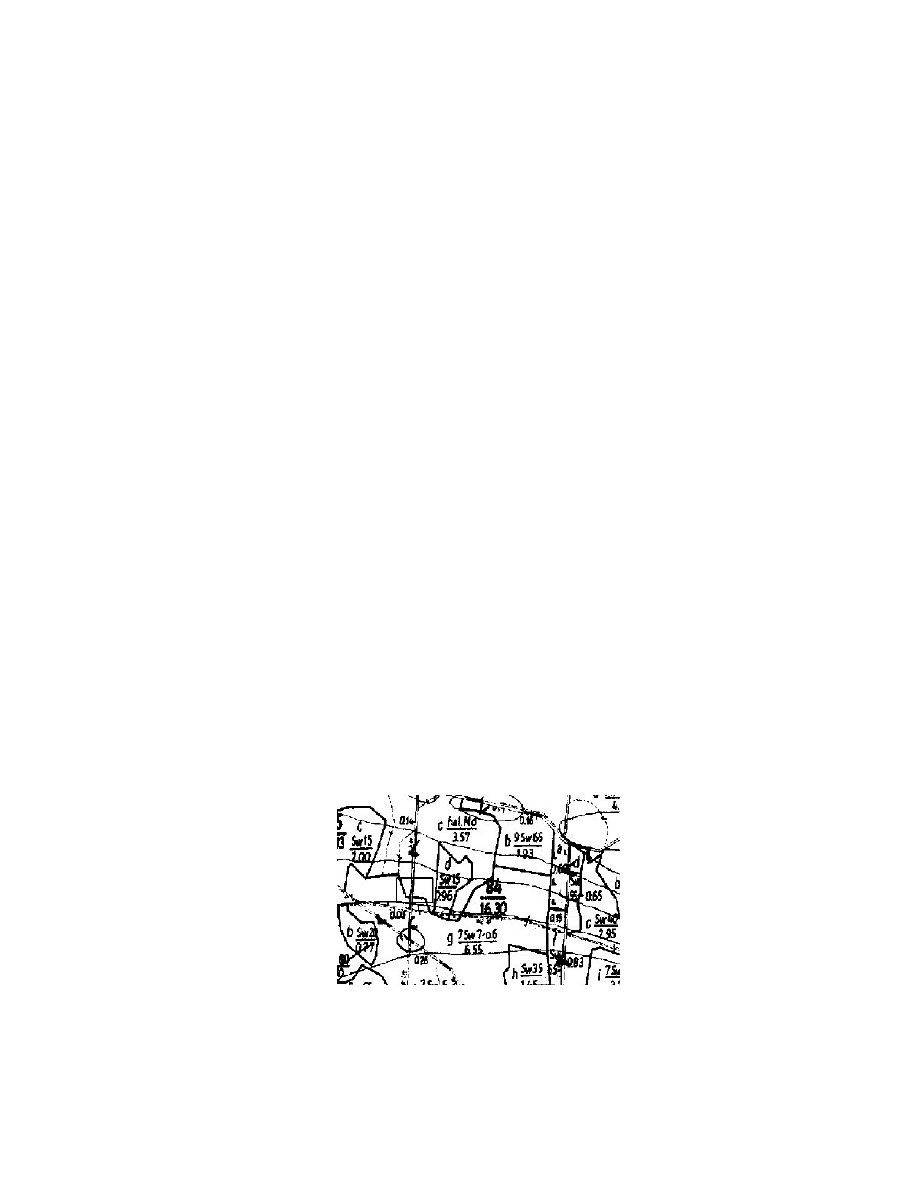
Obraz rastrowy jest bardzo dokładny, ale niestety bardzo obszerny. Przy skalowaniu
traci du
ż
o na jako
ś
ci, co obrazuje Rysunek 14.
Rysunek 14. Fragment mapy rastrowej używanej jako podkład.
40
Rysunek 15. Część mapy z rys. 14 w dużym powiększeniu
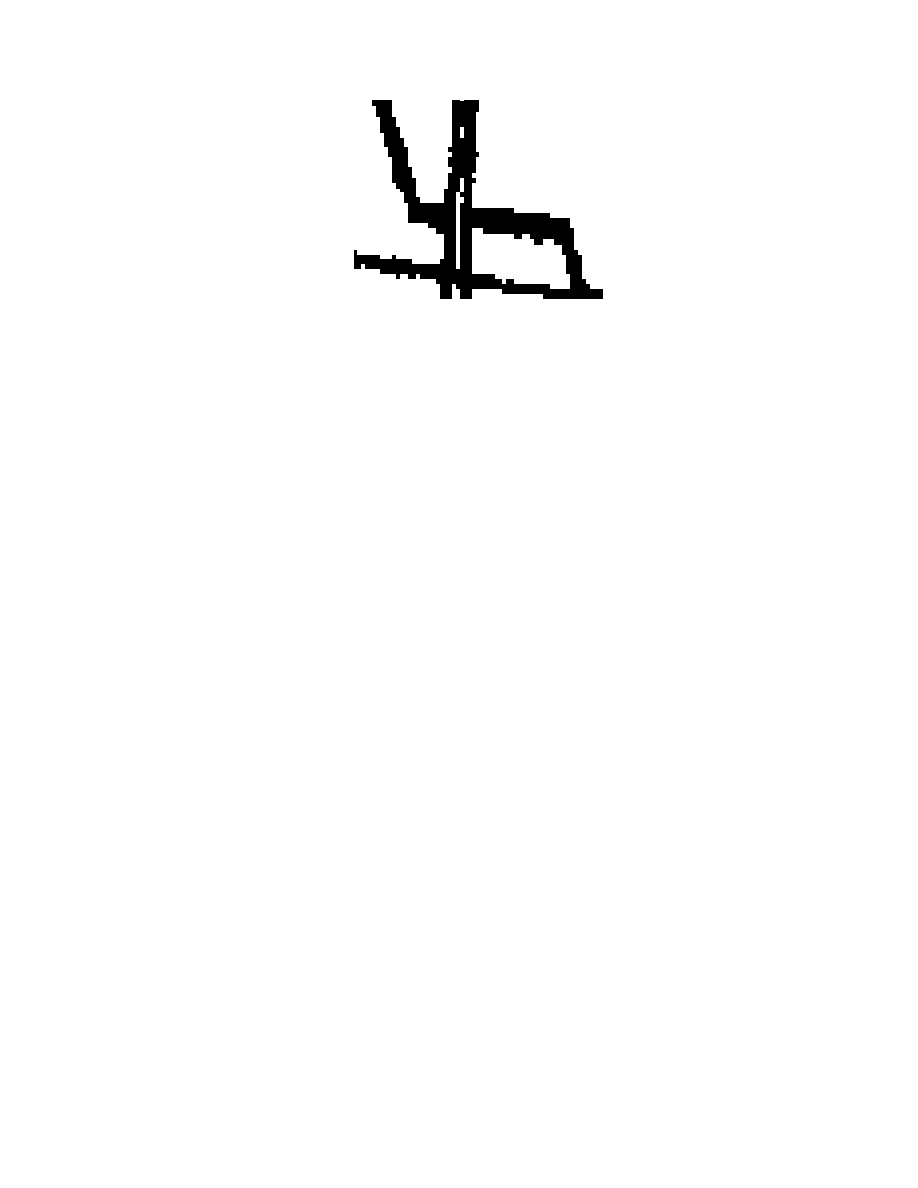
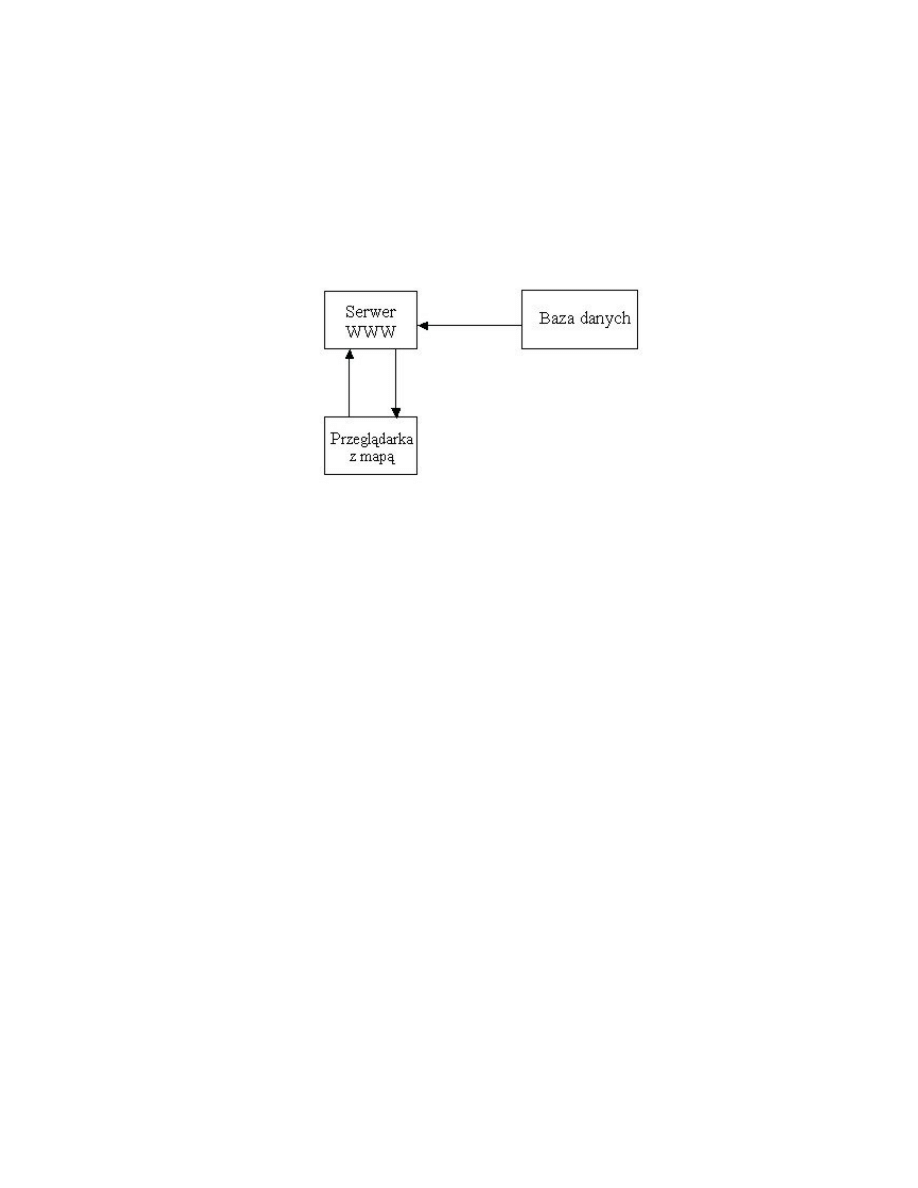
2.8. Mapa w Internecie(Web GIS)
W sieci Internet oprócz powszechnie wszystkim znanych dokumentów
tekstowych i graficznych mo
ż
emy znale
źć
ró
ż
nego rodzaju mapy.
Istnieje wiele technik prezentacji mapy w Internecie. Najprostsza z nich to tzw.
technika „obrazów kartograficznych”(ang.
image maps
). Polega ona na podł
ą
czeniu do
okre
ś
lonych miejsc na mapie odno
ś
ników odsyłaj
ą
cych do innego rodzaju informacji.
Klikaj
ą
c na te tzw. “hot spots” przechodzimy do innego dokumentu, zawieraj
ą
cego
bardziej szczegółow
ą
informacj
ę
oraz zasoby zwi
ą
zane z danym miejscem na mapie.
Bardzo dobry przykład tego typu mo
ż
na znale
źć
na stronie [21].
Technika ta jest obecnie całkiem nie
ź
le rozwini
ę
ta, jednak
ż
e ma swoje istotne
ograniczenia, gdy
ż
u
ż
ytkownik mo
ż
e wykorzysta
ć
tylko te odno
ś
niki, które zostały
wpisane w map
ę
przez jej autora.
Kluczem umo
ż
liwiaj
ą
cym przej
ś
cie od statycznego uprzednio przygotowanego
dokumentu do interaktywnej platformy jest Web GIS. Jest to tradycyjny system
SIP/GIS, który mo
ż
emy obsługiwa
ć
za pomoc
ą
przegl
ą
darki. Najprostsze rozwi
ą
zania
tego typu polegaj
ą
na utworzeniu na serwerze obrazka (np.: w formacie JPG, GIF) na
podstawie przechowywanych na serwerze danych, a nast
ę
pnie wy
ś
wietlenie go w
przegl
ą
darce. W takim przypadku rola przegl
ą
darki internetowej sprowadza si
ę
jedynie
do wy
ś
wietlenia podanego przez serwer obrazka. Bardziej zaawansowane rozwi
ą
zania
polegaj
ą
na przesyłaniu do klienta informacji o budowie mapy, z których dopiero po
stronie przegl
ą
darki tworzona jest mapa przy u
ż
yciu apletu Javy lub „wtyczki”
ActiveX, które zostały wcze
ś
niej
ś
ci
ą
gni
ę
ta na komputer klienta(Rysunek 16).
Dzi
ę
ki takiemu rozwi
ą
zaniu u
ż
ytkownik ma mo
ż
liwo
ść
korzystania z takich funkcji jak:
-
przegl
ą
danie mapy
41
-
powi
ę
kszanie, zmniejszanie
-
wyszukiwanie okre
ś
lonych obiektów na mapie
-
dokonywanie wydruków
-
dokonywanie analiz przestrzennych
-
czasem dokonywanie edycji mapy
Rysunek 16. Schemat działania Web GIS

42
Rozdział 3. Analiza danych przestrzennych
Analiza danych przestrzennych polega na poszukiwaniu uporz
ą
dkowania
lub odchylenia od regularnego rozkładu zmiennych w przestrzeni, a tak
ż
e odnajdywaniu
zale
ż
no
ś
ci pomi
ę
dzy zmiennymi w celu ustalenia zwi
ą
zku przyczynowo-skutkowego.
Wykrycie zale
ż
no
ś
ci pomi
ę
dzy poszczególnymi elementami, pozwala na budowanie
bardziej zło
ż
onego modelu rzeczywisto
ś
ci, jest tak
ż
e podstaw
ą
do klasyfikacji i
regionalizacji. „Analiza danych dostarcza nowe informacje, które pozwalaj
ą
budowa
ć
nowe hipotezy, planowa
ć
wszelkiego rodzaju eksperymenty”[8]. Bardzo cz
ę
sto na
podstawie kilku danych mo
ż
na uzyska
ć
now
ą
jako
ś
ciowo informacj
ę
pozwalaj
ą
c
ą
podj
ąć
decyzj
ę
lub dostrzec okre
ś
lone procesy zachodz
ą
ce w badanych otoczeniu.
Analiza mo
ż
e dotyczy
ć
danych zawartych w jednej lub kilku warstwach tematycznych,
w zale
ż
no
ś
ci od potrzeb.
Istnieje bardzo wiele metod analizy, w dalszej cz
ęś
ci tego rozdziału przedstawi
ę
metody
analizy danych wykorzystywane w systemach informacji przestrzennej
3.1. Podstawy analizy
Analiza danych zwykle składa si
ę
z dwóch etapów: wyboru danych oraz
działa
ń
wykonywanych na tych danych. Przetwarzanie danych mo
ż
e dotyczy
ć
:
-
atrybutów obiektów
-
geometrycznych cech obiektów
-
atrybutów i cech geometrycznych jednocze
ś
nie
Na ka
ż
dym poziome analizy mo
ż
na stosowa
ć
operacje arytmetyczne, geometryczne,
logiczne oraz statystyczne.
Operacje arytmetyczne
Operatory te stosowane s
ą
we wszystkich obliczeniach geometrycznych, które
maj
ą
na celu okre
ś
lenie odległo
ś
ci, powierzchni, obj
ę
to
ś
ci czy kierunku, a tak
ż
e w
procesie przetwarzania atrybutów. Ka
ż
dy system geoinformacyjnym oferuje operatory:
dodawania, mno
ż
enia, dzielenia, pot
ę
gowania, pierwiastkowanie i inne. Jednak w
czasie wykonywania ci
ą
gu operacji arytmetycznych na liczbach rzeczywistych cz
ę
sto
43
mog
ą
pojawia
ć
si
ę
bł
ę
dy, dlatego w trakcie tworzenia systemu stosuje si
ę
nast
ę
puj
ą
ce
zasady, które pozwalaj
ą
unikn
ąć
takich sytuacji:
-
unikanie działa
ń
na danych wzajemnie skorelowanych
-
głównie stosuje si
ę
dodawania
-
gdy nie mo
ż
na dodawa
ć
, wykonuje si
ę
mno
ż
enie lub odejmowanie
-
unikanie dzielenia i pot
ę
gowania
Operacje logiczne
Stosowanie s
ą
tradycyjne operatory relacji: równa si
ę
(=), wi
ę
ksze (>), mniejsze
(<) oraz zło
ż
enia tych operatorów (>=, <=). Przykładem zastosowania operatorów
logicznych mo
ż
e by
ć
znalezienie obiektów, których atrybuty zawarte s
ą
w pewnym
przedziale.
Algebra Boole’a
Główne operatory logiczne to: suma logiczna (OR), negacja (NOT), iloczyn
logiczny (AND), wykluczenie (NOR). Operatory te s
ą
niezwykle istotne w systemach
przestrzennych, gdy
ż
w poł
ą
czeniu z operatorami relacji, pozwalaj
ą
przeszukiwa
ć
równocze
ś
nie kilka warstw tematycznych i dokonywa
ć
zło
ż
one analizy.
Logika rozmyta
Znajduje zastosowanie wsz
ę
dzie tam gdzie spotykamy si
ę
z opisem modeli
rzeczywisto
ś
ci o nieostrych granicach. W logice klasycznej ka
ż
dy obiekt nale
ż
y, albo
nie nale
ż
y do zbioru. Nie mo
ż
na natkn
ąć
si
ę
na przypadek gdzie dany obiekt spełnia
pewien warunek, a jednocze
ś
nie go nie spełnia. W logice rozmytej obiekty mog
ą
cz
ęś
ciowo nale
ż
e
ć
do zbioru rozmytego, a cz
ęś
ciowo do innych zbiorów rozł
ą
cznych.
W przypadku zwykłych zbiorów jego granice s
ą
ostre, podczas gdy granice zbiorów
rozmytych zanikaj
ą
łagodnie, co sprawia, i
ż
mog
ą
by
ć
one przydatne w analizie modeli
przestrzennych, które charakteryzuj
ą
si
ę
zmienno
ś
ci
ą
granic. Stopie
ń
rozmycia zbioru
okre
ś
la pewien zakres wyst
ą
pienia danych warunków, np.: stopie
ń
zgodno
ś
ci atrybutu
za zbiorem. Ponadto logika rozmyta wymaga,
ż
eby suma stopni przynale
ż
no
ś
ci obiektu
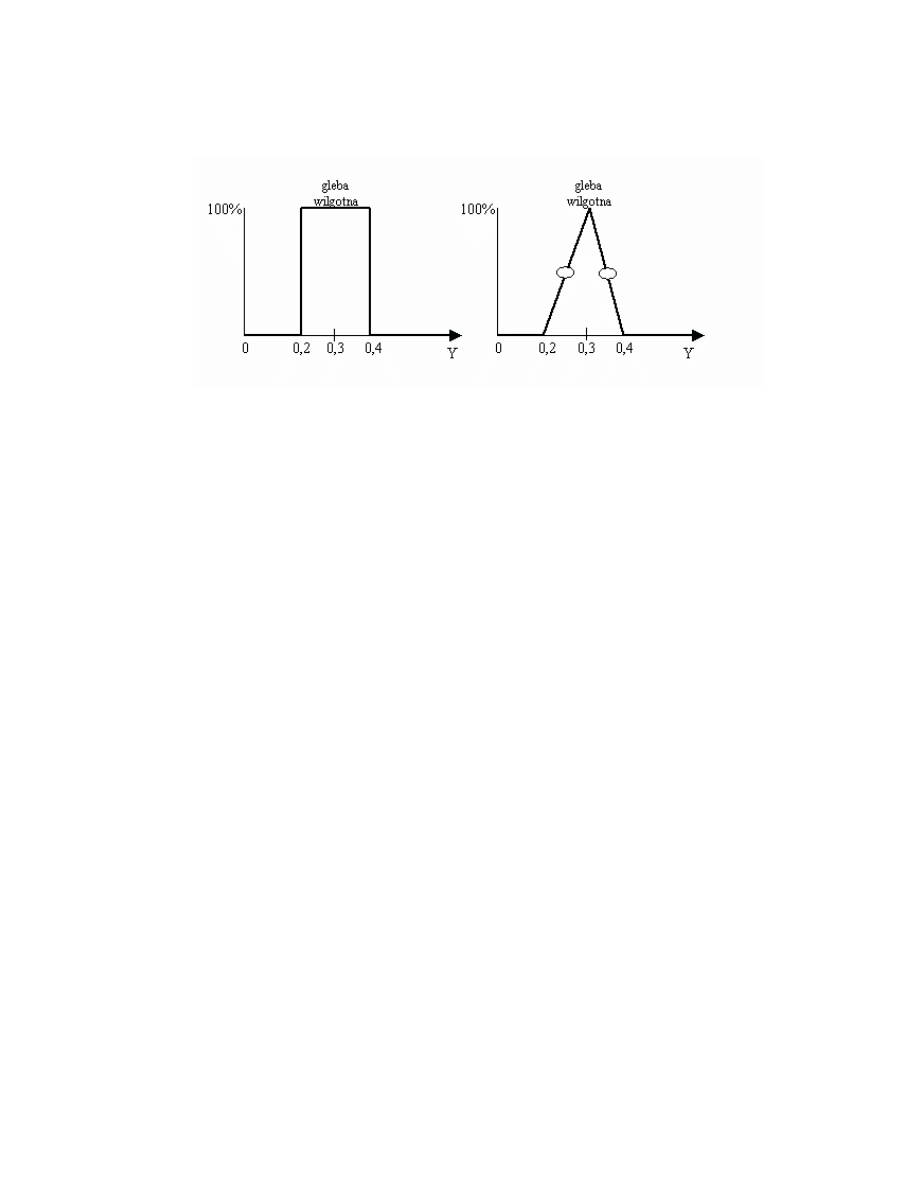
44
do zbiorów rozł
ą
cznych wynosiła 1. System logiki dwuwarto
ś
ciowej upraszcza problem
zaokr
ą
glaj
ą
c, do zera lub jedynki stopie
ń
przynale
ż
no
ś
ci zbioru.
Rysunek 17. Funkcja przynależności do zbioru (od lewej): w logice standardowej, w logice rozmytej
Logika rozmyta znajduje zastosowanie w procesie analizy, w warunkach istnienia
nieokre
ś
lono
ś
ci np.: przy modelowaniu zło
ż
onych systemów przyrodniczych, których
nie jeste
ś
my w stanie opisa
ć
w sposób deterministyczny.
Operacje geometryczne
Wykorzystywane s
ą
do pomiarów kartometrycznych, takich jak okre
ś
lenie
odległo
ś
ci, powierzchni i obj
ę
to
ś
ci. W zapisie wektorowym odległo
ść
jest obliczana na
podstawie współrz
ę
dnych pocz
ą
tku i ko
ń
ca odcinka, natomiast w modelu rastrowym
jako liczba pikseli pomno
ż
ona przez jednostk
ę
rastra, czyli wielko
ść
piksela lub jego
przek
ą
tnej. Powierzchnia i obwód obliczane s
ą
w trakcie tworzenia wieloboków.
Operacje statystyczne
Operacje te odnosz
ą
si
ę
głównie do atrybutów, a tak
ż
e niektórych cech
geometrycznych obiektów. Analiza statystyczna dostarcza podstawowych informacji o
zmienno
ś
ci, rozkładzie i korelacji warto
ś
ci w próbie; pozwala tak
ż
e wykrywa
ć
warto
ś
ci
obci
ąż
one bł
ę
dem. Jednym z cz
ę
sto stosowanych narz
ę
dzi statystyki jest analiza
cz
ę
sto
ś
ci. Wykres cz
ę
sto
ś
ci (histogram) jest obrazem liczby warto
ś
ci wyst
ę
puj
ą
cych w
zło
ż
onych przedziałach, pomaga on ustali
ć
granice klas, a tak
ż
e oceni
ć
, czy próba ma
rozkład zbli
ż
ony do normalnego, co ma du
ż
e znaczenie w analizie przestrzennego
rozkładu zmiennej. Z rozkładem próby zwi
ą
zana jest normalizacja(standaryzacja)

45
danych, do których nale
ż
y logarytmowanie, transformacja wska
ź
nikowa i rangowa.
Transformacja wska
ź
nikowa dokonuje zmiany w próbie na zera lub jedynki, zale
ż
nie od
tego, czy s
ą
wi
ę
ksze, czy mniejsze od przyj
ę
tej warto
ś
ci granicznej. Transformacja
rangowa umo
ż
liwia sortowanie warto
ś
ci w próbie w porz
ą
dku rosn
ą
cym lub
malej
ą
cym.
W metodach statystycznych stosowane s
ą
równie
ż
bardziej zło
ż
one metody, jak analiza
korelacji dwóch zmiennych, która pomaga okre
ś
li
ć
przestrzenn
ą
współzale
ż
no
ść
mi
ę
dzy próbami.
Wykorzystuj
ą
c opisane powy
ż
ej rodzaje operacji mo
ż
na przyst
ą
pi
ć
do bardziej
zło
ż
onych metod analizy danych przestrzennych, które zostan
ą
przedstawione w dalszej
cz
ęś
ci pracy.
3.2. Klasyfikacja i wyszukiwanie
Funkcje wyszukiwania i klasyfikacji s
ą
najprostsz
ą
grup
ą
funkcji SIP, które
istniej
ą
w ka
ż
dym systemie tego typu. Charakterystyczn
ą
cech
ą
tych funkcji jest fakt, i
ż
modyfikuj
ą
wył
ą
cznie dane atrybutowe. Dane graficzne nie ulegaj
ą
ż
adnym
przekształceniom i s
ą
wykorzystywane jedynie w procesie wizualizacji.
3.2.1. Wskazywanie
Jest to najprostsza funkcja spo
ś
ród wszystkich funkcji analizy danych.
Sprowadza si
ę
do najechania przez u
ż
ytkownika kursorem na dowolny obiekt
znajduj
ą
cy si
ę
na ekranie i wskazanie go np.: przez dwukrotne naci
ś
ni
ę
cie klawisza
myszki. Najcz
ęś
ciej celem wskazywania obiektu jest wy
ś
wietlenie jego danych
atrybutowych. Po najechaniu kursorem na działk
ę
i dwukrotnym naci
ś
ni
ę
ciu klawisza
myszki na ekranie ukazuj
ą
si
ę
dane atrybutowe np.: nazwa działki, nr działki,
powierzchnia, obj
ę
to
ść
.
46
Rysunek 18. Funkcja wskazywania[23]
Innym celem wskazywania obiektu mo
ż
e by
ć
jego oznaczenie, wówczas w polu
oznaczenia b
ę
dzie warto
ść
1. W ten sposób metod
ą
interakcji mo
ż
na oznaczy
ć
dowolny
podzbiór obiektów, na którym potem mo
ż
emy prowadzi
ć
dalsze analizy.
3.2.2. Selektywne wyszukiwanie
Funkcja ta polega na wybraniu i zaznaczeniu obiektów, których atrybuty
spełniaj
ą
pewien warunek logiczny. Przykładem mo
ż
e by
ć
funkcja, która wyznacza
działki, które maj
ą
powierzchnie wi
ę
ksz
ą
od 200 m
2
.
3.2.3. Klasyfikacja
Klasyfikacja charakteryzuje si
ę
podziałem obiektów na klasy. Bardzo cz
ę
sto
stosuje si
ę
to przy tworzeniu warstw i opisywaniu obiektów. Funkcja ta wyst
ę
puje
zarówno w systemach wektorowych jak i rastrowych. Mo
ż
na j
ą
stosowa
ć
do jednej
warstwy; wówczas mamy do czynienia z tzw. reklasyfikacj
ę
(ang. r
eclassification
)
warto
ś
ci komórek. Operacja polega na zmianie warto
ś
ci komórek na nowe warto
ś
ci
według pewnego wzorca. Funkcj
ę
t
ę
mo
ż
na równie
ż
stosowa
ć
do działania na kilku
warstwach i wówczas jest równoznaczna funkcji nakładania. Przy nakładaniu na siebie
co najmniej dwóch warstw rastrowych warto
ść
komórki rastra nowej warstwy jest
wynikiem klasyfikacji warto
ś
ci odpowiadaj
ą
cych sobie komórek nakładanych na siebie
warstw.
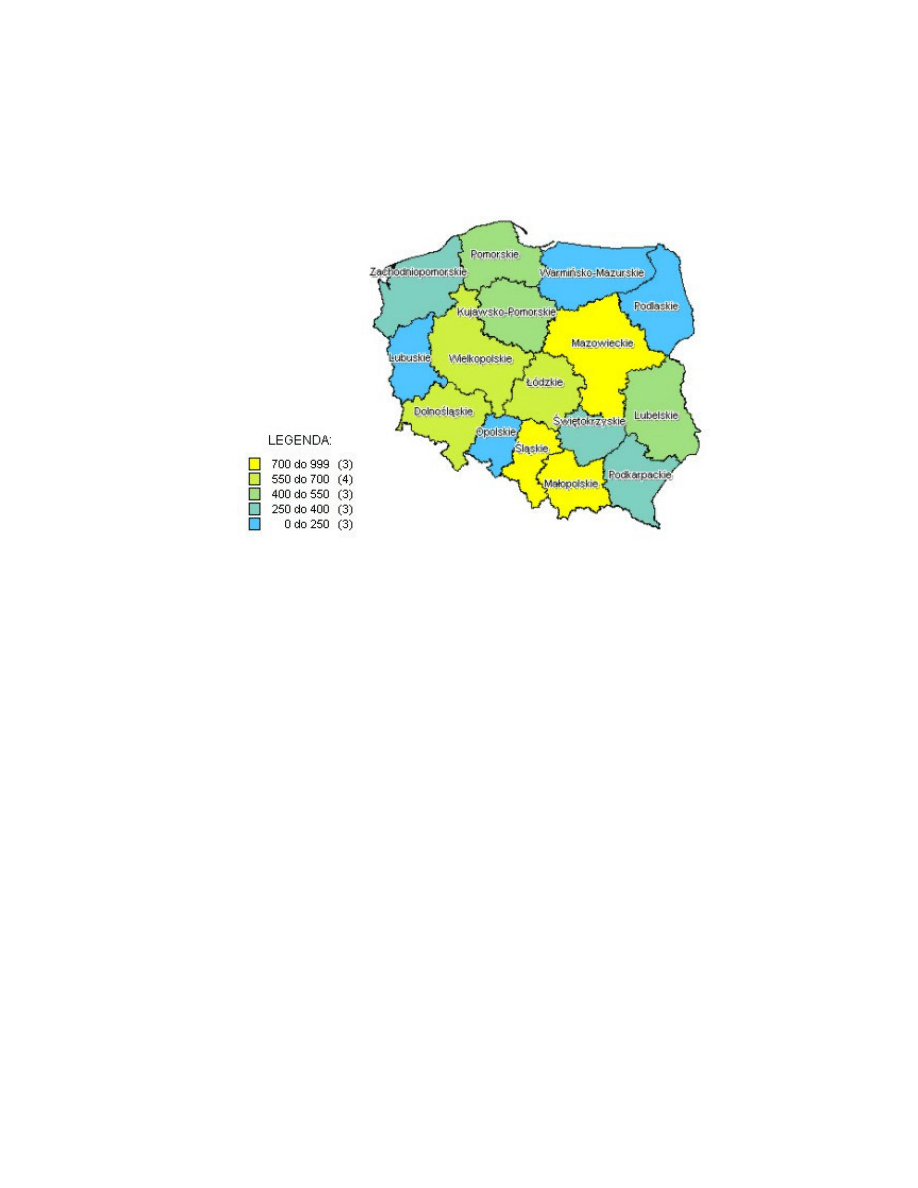
47
Przykładem klasyfikacji jest podział obiektów na klasy w zale
ż
no
ś
ci od pewnej
cechy atrybutowej np.: podział działek na cztery klasy ze wzgl
ę
du na „uzbrojenie”
działki.
Rysunek 19. Funkcja klasyfikacji wykonana na podstawie jednej cechy atrybutowej. Obrazuje ilość
klientów firmy X w poszczególnych województwach.[23]
3.3. Pomiary
Charakterystyczn
ą
cech
ą
tych funkcji jest wykonywanie pomiarów
dotycz
ą
cych obiektów geograficznych. Pomiary, które najcz
ęś
ciej mo
ż
na spotka
ć
to:
pomiar odległo
ś
ci, pola powierzchni poligonu, długo
ś
ci linii. Pomiary w systemach
wektorowych mo
ż
na wykonywa
ć
na dwa sposoby. Pierwszy polega na wykonaniu
pomiarów interakcyjnie, np.: wskazuj
ą
c obiekt na ekranie uzyskujemy jego pole
powierzchni. Drugi sposób to pomiary wykonywane automatycznie dla wszystkich lub
pewnego okre
ś
lonego podzbioru obiektów. Sposób ten jest znacznie bardziej istotny,
gdy
ż
umo
ż
liwia ł
ą
czenie pomiarów z innymi funkcjami.
Przy modelu wektorowym równie
ż
spotykamy si
ę
z funkcjami pomiaru. S
ą
to
głównie pomiary odległo
ś
ci pomi
ę
dzy komórkami rastra lub pomiary powierzchni
podzbioru elementów rastra danej klasy.
Ciekawymi rodzajami pomiarów s
ą
równie
ż
pomiary kształtu. Składaj
ą
si
ę
one z
wielu funkcji mierz
ą
cych relacje geometryczne elementów danego obiektu, np.:
stosunek obwodu do powierzchni. W procesie analizy sieci dróg u
ż
ywa si
ę
cz
ę
sto

48
funkcji okre
ś
laj
ą
cych „kr
ę
to
ść
drogi”. Kr
ę
to
ść
t
ę
wyznacza si
ę
jako stosunek długo
ś
ci
drogi do odcinka ł
ą
cz
ą
cego pocz
ą
tek i koniec drogi.
3.4. Funkcje sąsiedztwa
Funkcje te charakteryzuj
ą
si
ę
tym, i
ż
mo
ż
na bada
ć
za ich pomoc
ą
otoczenie
wokół okre
ś
lonego miejsca. Ka
ż
da z funkcje tego typu powinna mie
ć
okre
ś
lone trzy
podstawowe parametry:
-
jeden lub kilka punktów centralnych
-
obszar wokół punktu centralnego
-
rodzaj operacji wykonywanej na obiektach znajduj
ą
cych si
ę
na tym obszarze
Istnieje wiele odmian funkcji s
ą
siedztwa. Jednak najcz
ęś
ciej wykorzystywan
ą
jest funkcja poszukiwania. Funkcja ta przypisuje pewien wynik, uzyskany w wyniku
charakterystyki otoczenia, do ka
ż
dego celu(punktu centralnego). Celem mog
ą
by
ć
punkty, linie lub wieloboki, odległo
ść
za
ś
mo
ż
e by
ć
wyra
ż
ona w jednostkach czasu,
ceny lub innych.
Przykładem wykorzystania takiej funkcji mo
ż
e by
ć
zadanie polegaj
ą
ce na znalezieniu
parków usytuowanych nie dalej ni
ż
300 m od szkół. W tym przykładzie, punktami
centralnymi b
ę
d
ą
szkoły, otoczeniem, czyli s
ą
siedztwem, koło o promieniu 300 m, w
ś
rodku, którego znajdzie si
ę
szkoła. Operacj
ą
b
ę
dzie oznaczenie i liczenie parków.
Ka
ż
dej szkole b
ę
dzie przypisana liczba odpowiadaj
ą
ca liczbie parków, które znajduj
ą
si
ę
w jej s
ą
siedztwie.
3.5. Funkcje łączenia
Funkcja ł
ą
czenia polegaj
ą
na analizowaniu i zbieraniu informacji wzdłu
ż
pewnej
drogi. Droga taka jest wyznaczana za pomoc
ą
procedury zawieraj
ą
cej zasad
ę
wyboru.
Ka
ż
da z funkcji ł
ą
czenia ma nast
ę
puj
ą
ce cechy:
-
zdefiniowany jest sposób poł
ą
czenia obiektów
-
ustalony jest sposób poruszania
-
ustalona jest wielko
ść
mierzona
Funkcje ł
ą
czenia mo
ż
emy podzieli
ć
na nast
ę
puj
ą
ce grupy: funkcje ci
ą
gło
ś
ci (ang
.
contiguity
), buforowanie (ang.
proximity
)
,
funkcje sieciowe (ang.
network
), funkcje
rozprzestrzeniania (ang.
spread
)
i funkcje widoczno
ś
ci terenu (ang.
intervisibility
).
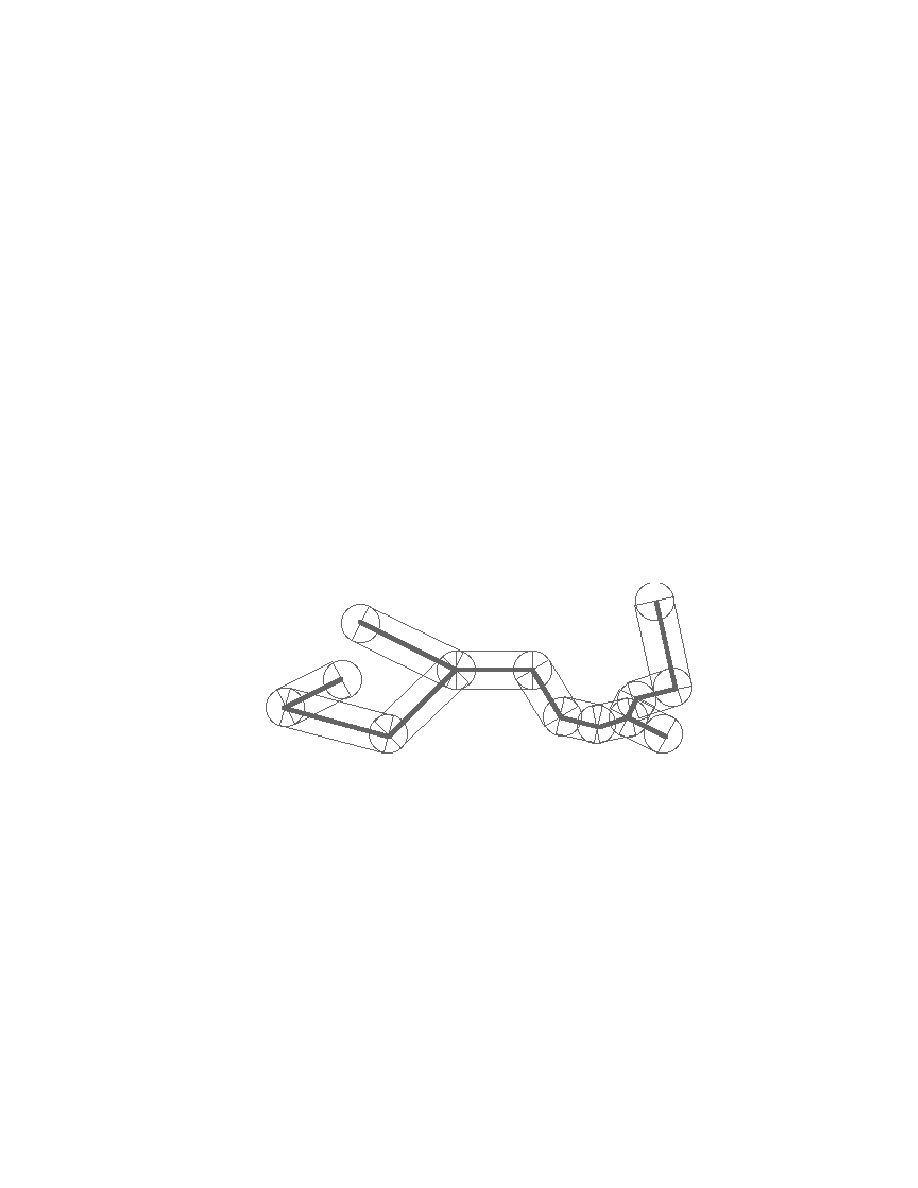
49
3.5.1. Funkcje ciągłości
Pozwalaj
ą
budowa
ć
zbiory obiektów poł
ą
czonych ze sob
ą
i spełniaj
ą
cych pewne
warunki odno
ś
nie swoich cech. Przykładem mo
ż
e by
ć
znalezienie obszarów le
ś
nych o
ł
ą
czne powierzchni ponad 100 km
2
.
3.5.2. Buforowanie
Funkcje buforowania tworz
ą
bufory (ang.
buffer zone
). Bufory s
ą
to polygony
otaczaj
ą
ce dane obiekty w taki sposób,
ż
e ich granice zachowuj
ą
stał
ą
odległo
ść
od
elementów otaczanego obiektu. Bufory mo
ż
na tworzy
ć
dookoła obiektów punktowych,
liniowych i poligonów.
Odległo
ść
od elementów obiektu do granicy bufora nosi nazw
ę
rozmiaru bufora
(ang.
buffer setback
).
Tworzenie buforów jest wa
ż
n
ą
i przydatn
ą
funkcj
ą
w analizie przestrzennej.
Powoduje ona powstawanie nowej warstwy poligonów, któr
ą
mo
ż
na wykorzysta
ć
w
dalszej analizie. Typowym przykładem wykorzystania jest wyznaczenie obiektów lub
ich cz
ęś
ci, które znajduj
ą
si
ę
nie dalej ni
ż
zadana odległo
ść
od wybranego obiektu.
Rysunek 20. Bufor utworzony wzdłuż obiektu liniowego
3.5.3. Funkcje sieciowe
Jest to typ funkcji realizowanych na zbiorach poł
ą
czonych ze sob
ą
obiektów
linowych, czy polilinii. Przykładem takich zbiorów s
ą
ulice miast sie
ć
wodna,
elektryczna, kolejowa.
W systemach SIP spotykamy si
ę
z kilkoma odmianami funkcji sieciowych, s
ą
to:
•
funkcje obci
ąż
enia sieci (ang.
network loading
)
Tego typu funkcja znajduje zastosowanie przy badaniu obci
ąż
enia ruchu
samochodów po ulicach miast. Po wprowadzeniu pewnej ilo
ś
ci samochodów do

50
sieci b
ę
dzie mo
ż
na stwierdzi
ć
jak efektywnie b
ę
d
ą
si
ę
poruszały i przewidzie
ć
,
w których miejscach mog
ą
pojawi
ć
si
ę
zatory w ruchu.
•
optymalizacja poruszania si
ę
po sieci (ang.
route optimalization
)
Typowym przykładem wykorzystania tego typu funkcji jest znalezienie
najkrótszej drogi ł
ą
cz
ą
cej dwa punkty, przy czym „najkrótsza droga” mo
ż
e
oznacza
ć
drog
ę
o najmniejszej długo
ś
ci jak i drog
ę
o najkrótszym czasie
przejazdu.
•
funkcja rozmieszczenia sił i
ś
rodków (ang.
resource allocation
)
Funkcje te wykorzystywane s
ą
do wyznaczania rejonów pracy patroli
policyjnych lub obszarów obsługiwanych przez poszczególne jednostki stra
ż
y
po
ż
arnej
3.6. Funkcje nakładania
Funkcje te pełni
ą
bardzo wa
ż
n
ą
rol
ę
w rastrowych i wektorowych
systemach SIP. Pozwalaj
ą
na budowanie nowych warstw, ł
ą
cz
ą
cych informacje z
warstw nakładanych. Nowe warstwy zawieraj
ą
zarówno zbiór obiektów, jaki i zbiór
atrybutów powstały w wyniku przetworzenia warstw nakładanych. Funkcji tej nie
nale
ż
y myli
ć
z graficznym nakładaniem, które polega na kolejnym wy
ś
wietlaniu
warstw. Operacja ta nie tworzy nowej warstwy, ale przedstawia jednocze
ś
nie obraz z
kilku warstw.
Istnieje pewna ró
ż
nica mi
ę
dzy operacj
ą
nakładania w systemie rastrowym i
wektorowym.
W modelu rastrowym jest ona bardzo prosta z technicznego punkt widzenia.
Nało
ż
eniu podlegaj
ą
kolejne komórki warstwy rastrowej, ka
ż
d
ą
na odpowiadaj
ą
c
ą
jej
komórk
ę
w kolejnej warstwie. Nakładanie mo
ż
na podzieli
ć
na arytmetyczne, gdzie
nast
ę
puje wykonanie operacji arytmetycznej na kolejnych odpowiadaj
ą
cych sobie
komórkach dwóch tablic rastrowych. Wynikiem tej operacji jest utworzenie trzeciej
tablicy. Kolejny sposób nakładania to nakładanie logiczne, gdzie wyst
ę
puje operacja
logiczna, której wynikiem jest równie
ż
trzecia tablica. Nakładanie logiczne jest
równowa
ż
ne z funkcj
ą
klasyfikacji.
Proces nakładanie w przypadku modelu wektorowym jest znacznie bardzie
zło
ż
ony, ze wzgl
ę
du na ró
ż
ne kształty nakładanych na siebie obiektów.

51
Nowa warstwa mo
ż
e zosta
ć
utworzona przez modyfikacj
ę
starej warstwy, która mo
ż
e
składa
ć
si
ę
z obiektów punktowych, liniowych lub polygonów. Modyfikacja taka mo
ż
e
polega
ć
na wyci
ę
ciu, rozdzieleniu lub aktualizacji warstwy. Podstawow
ą
grup
ą
funkcji
nakładania s
ą
funkcje wykonuj
ą
ce operacje nakładania dwóch ró
ż
nych warstw. Mo
ż
e to
by
ć
operacja nakładania warstwy punktów na warstw
ę
poligonów. Rezultatem takiej
operacji jest nowa warstwa, która zawiera tylko te punkty, które weszły w skład grupy
oznaczonych poligonów. Mo
ż
na równie
ż
nało
ż
y
ć
warstw
ę
linii na warstw
ę
polygonów.
Przykładem takiej funkcji jest obliczenie długo
ś
ci rzek w granicach danej jednostki
administracyjnej.
3.7. Autokowariancja geostatystyczna (przestrzenna)
W 1963 roku Matheron zaproponował metod
ę
ilo
ś
ciowego opisu zró
ż
nicowania,
zwan
ą
analiz
ą
zmiennych regionalizowanych (ang.
regionalized variables
), której
podstaw
ą
jest semiwariogram. Semiwariogram jest to funkcja obrazuj
ą
ca
autokowariancj
ę
przestrzenn
ą
, czyli podobie
ń
stwo punktów pomiarowych w funkcji
odległo
ś
ci. W metodzie tej zakładamy,
ż
e ró
ż
nice pomi
ę
dzy punktami pomiarowymi
wzrastaj
ą
w miar
ę
oddalenia, a wszelkie podobie
ń
stwo zanika po przekroczeniu
odległo
ś
ci zwanej promieniem oddziaływania.
Pomiary wykonane t
ą
metod
ą
mog
ą
zosta
ć
zakłócone przez istnienie ogólnej tendencji
w rozkładzie próby, np.: dane o rozprzestrzenieniu si
ę
zanieczyszcze
ń
wody
podziemnej mog
ą
wykazywa
ć
dominuj
ą
ce trendy wynikaj
ą
ce z kierunku przepływu
wody w warstwie wodono
ś
nej. W takie sytuacji nale
ż
y najpierw dokona
ć
analiz
ę
trendu
i z rozkładu warto
ś
ci wyeliminowa
ć
składow
ą
systematyczn
ą
[8].
Metod
ę
analizy autokowariancji przestrzennej mo
ż
na u
ż
ywa
ć
do opisu zró
ż
nicowania
wła
ś
ciwo
ś
ci gruntów, gleb, warstw wodono
ś
nych i innych pól.[13]
3.8. Konwersja formatów danych
W celu przej
ś
cia z modelu rastrowego na wektorowy lub odwrotnie nale
ż
y
zastosowa
ć
specjalne funkcje konwersji.
Konwersja danych rastrowych na wektorowe nazywana jest rasteryzacj
ą
(ang.
rasterization
). Proces rasteryzacji składa si
ę
z kilku etapów. Pierwszy etap polega na
wprowadzaniu danych opisuj
ą
cych obraz wektorowy do komputera. W drugim etapie
tworzy si
ę
tablice rastrow
ą
, w której b
ę
d
ą
zapisywane wyniki rasteryzacji.
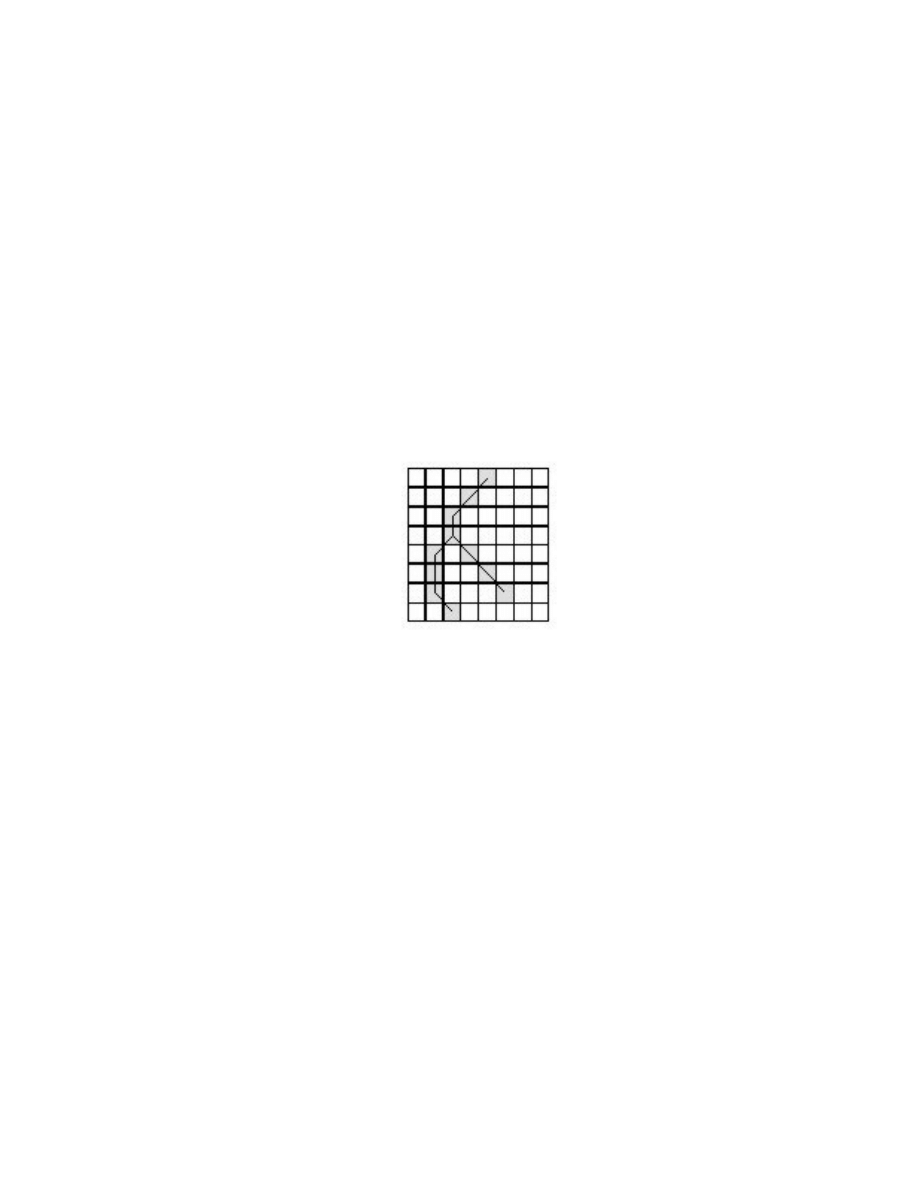
52
Najwa
ż
niejsz
ą
spraw
ą
w czasie tego procesu jest okre
ś
lenie wielko
ś
ci elementu rastra.
Tablic
ę
tak
ą
mo
ż
na umiejscowi
ć
w pami
ę
ci komputera lub, je
ż
eli jest zbyt du
ż
a,
zapisa
ć
tylko poło
ż
enie elementów rastra, które zawieraj
ą
elementy obrazu
wektorowego. Rasteryzacja jest równoznaczna z rozwi
ą
zaniem procesem rysowania
odcinka na ekranie. Znaj
ą
c punkt pocz
ą
tku i ko
ń
ca odcinka jeste
ś
my w stanie okre
ś
li
ć
,
które elementy rastra powinny by
ć
wypełnione. Ka
ż
dy z obiektów liniowych i
powierzchniowych zbudowany jest z odcinków, co sprawia, i
ż
łatwo mo
ż
na je
przenosi
ć
do postaci rastrowej.
Praktycznym przykładem zastosowania tego rodzaju konwersji mo
ż
e by
ć
operacja nakładania dwóch warstw wektorowych. W przypadku bardzo du
ż
ej
zło
ż
ono
ś
ci warstw, mo
ż
e si
ę
okaza
ć
, i
ż
bardziej opłacalne b
ę
dzie wykonanie rasteryzcji
obu warstw, a nast
ę
pnie nało
ż
enie ich jako warstw rastrowych.
Rysunek 21. Rasteryzacja - zmiana linii na raster
Konwersja formatu rastrowego na wektorowy nosi nazw
ę
wektoryzacji i jest to
znacznie bardziej zło
ż
ony proces od poprzedniego. Jednak ze wzgl
ę
du na łatwo
ść
skalowania takich map coraz bardziej ro
ś
nie potrzeba wykonywania tego typu operacji.
Podobnie jak proces rasteryzacji, wektoryzacja składa si
ę
z kilku etapów. W pierwszym
etapie nast
ę
puje zmniejszenie grubo
ś
ci linii obrazu rastrowego, nast
ę
pnie dochodzi do
wyodr
ę
bnienie linii z obrazu. Odbywa si
ę
to przez wyznaczenie punktów, przez które
b
ę
d
ą
przebiega
ć
linie rysunku. Ostatni etap polega na wyodr
ę
bnieniu w
ę
złów, czyli
punktów, w których linie si
ę
ł
ą
cz
ą
, ko
ń
cz
ą
lub zaczynaj
ą

53
Rozdział 4. Przegląd najbardziej
popularnych systemów SIP/GIS.
W rozdziale tym zaprezentuje najpopularniejsze programy typu SIP/GIS, jakie
mo
ż
na spotka
ć
na polskim rynku. Pełne zestawienie programów znajduje si
ę
w
zał
ą
czniku B. Wszystkie programy pracuj
ą
w wektorowym oraz rastrowym modelu
danych.
4.1. PC Arc/Info
Jest to oprogramowanie firmy ESRI, która stanowi czołówk
ę
firm zajmuj
ą
cych
si
ę
tematyk
ą
systemów informacji przestrzennej. Swego czasu było to najpopularniejsze
oprogramowanie na
ś
wiecie.
PC ArcInfo
jest zbiorem sze
ś
ciu zintegrowanych modułów
oprogramowania, które obejmuj
ą
podstawowe funkcje SIP oraz narz
ę
dzia do
projektowania map, wprowadzania i edycji danych, konwersji danych oraz analiz
przestrzennych.
U
ż
ywaj
ą
c
ArcInfo
mo
ż
emy :
-
automatycznie pozyskiwa
ć
i zarz
ą
dza
ć
danymi geograficznymi i opisowymi
-
analizowa
ć
dane kartograficzne
-
dokonywa
ć
jednoczesnej analizy danych przestrzennych i opisowych
-
wykonywa
ć
analizy sieciowe
Produkt firmy ESRI składa si
ę
z sze
ś
ciu zintegrowanych modułów:
-
PC STARTER KIT
- podstawowy moduł obejmuj
ą
cy narz
ę
dzia digitalizacji i
tworzenia map, tworzenia struktury topologicznej danych, tworzenia tabel
danych opisowych, plotowania map, tworzenia aplikacji i interfejsów
u
ż
ytkownika oraz komunikacji z serwerem sieciowym
-
PC ARCPLOT
- odpowiada za wła
ś
ciw
ą
jako
ść
graficzn
ą
zarówno obrazów
wy
ś
wietlanych
na
ekranie
monitora,
jak
równie
ż
produktów
kartograficznych, a tak
ż
e umo
ż
liwia działanie funkcji analiz przestrzennych.
-
PC ARCEDIT
- umo
ż
liwia edycj
ę
obiektów oraz jednoczesn
ą
przetwarzanie
i edycj
ę
warstw graficznych i danych opisowych
-
PC ARCEDIT - umo
ż
liwia edycj
ę
obiektów oraz jednoczesn
ą
przetwarzanie
i edycj
ę
warstw graficznych i danych opisowych
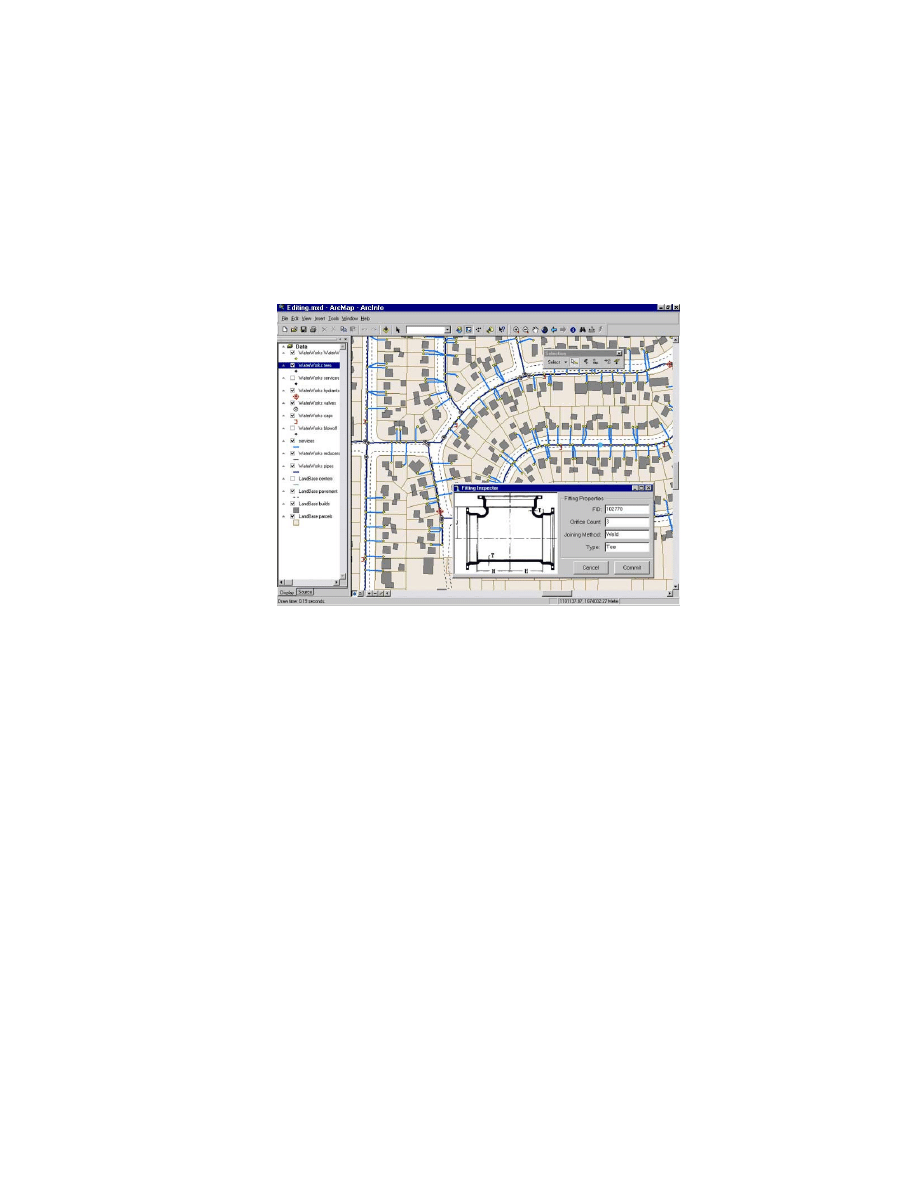
54
-
PC DATA CONVERSION
- obejmuje narz
ę
dzia słu
żą
ce transferowi danych
pomi
ę
dzy warstwami ArcInfo i innymi formatami danych geograficznych.
-
PC OVERLAY
- udost
ę
pnia zaawansowane funkcje analiz przestrzennych
obejmuj
ą
ce m.in.: nakładanie poligonów, buforowanie i wiele innych
-
PC NETWORK
- udost
ę
pnia zaawansowane funkcje analiz sieciowych i
geokodowanie(Rysunek 22).
Rysunek 22. Moduł PC Network systemu ArcInfo [26]
ArcInfo
posiada wewn
ę
trzny j
ę
zyk polece
ń
SML(ang.
Simple Macro Language
)
umo
ż
liwiaj
ą
cy tworzenie aplikacji u
ż
ytkownika.
Ogromn
ą
zalet
ą
tego oprogramowania jest, mo
ż
liwo
ść
instalacja na kilkunastu typach
komputerów, od „mainfram” po komputery osobiste, oraz kompleksowo
ść
gromadzenia
i przetwarzania danych wektorowych i rastrowych w powi
ą
zaniu z relacyjnymi bazami
danych.
4.2. MapInfo
Jest to sztandarowy produkt firmy MapInfo dost
ę
pny w wersji
Desktop
oraz
Professional
. Jest to rozbudowane
ś
rodowisko do zarz
ą
dzania danymi przestrzennymi,
jednak charakteryzuje si
ę
bardzo łatw
ą
obsług
ą
.
Sił
ą
analityczn
ą
MapInfo
jest bogactwo map tematycznych. To dzi
ę
ki nim mo
ż
liwa jest
łatwa analiza danych przestrzennych. Ich wyniki w postaci barwnych map s
ą
sugestywnymi narz
ę
dziami wspierania decyzji(Rysunek 23).
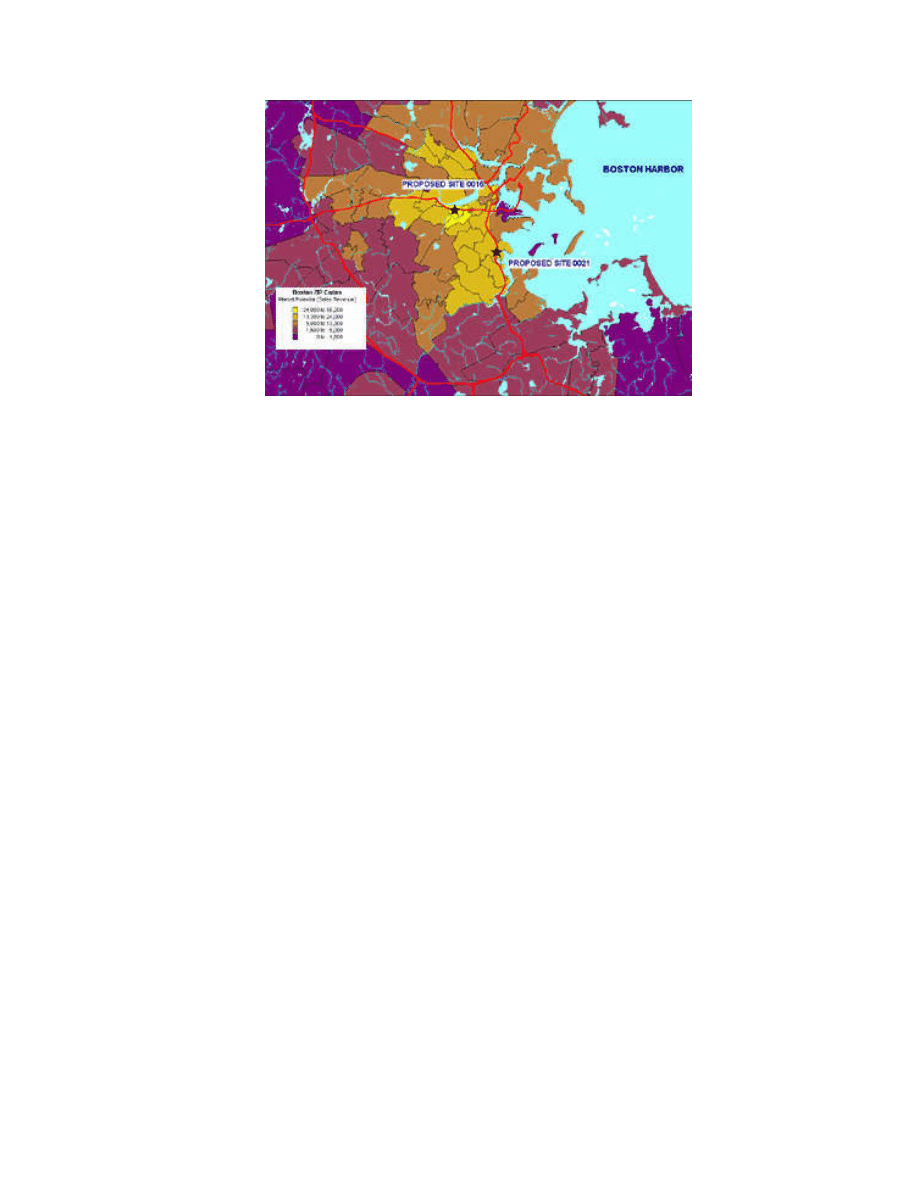
55
Rysunek 23. Klasyfikacja mapy w systemie MapInfo Professional [23]
Program współpracuje ze wszystkimi popularnymi formatami baz danych.
Bezpo
ś
rednio czyta pliki utworzone w MS Access, MS Excel, Lotus 1-2-3, pliki
tekstowe. Aplikacja oferuje równie
ż
szeroki dost
ę
p do plików rastrowych. Mo
ż
liwy jest
tak
ż
e import map wektorowych, danych oraz siatek rastrowych utworzonych w innych
systemach.
MapInfo
posiada wewn
ę
trzny j
ę
zyk MapBasic, który umo
ż
liwia poszerzenie
funkcjonalno
ś
ci oraz integracj
ę
z innymi aplikacjami. Na rynku jest wiele aplikacji
wspomagaj
ą
cych pakiet MapInfo. Na uwag
ę
zasługuj
ą
Vertical Mapper – program
obsługuj
ą
cy dane trójwymiarowe lub RouteView – aplikacja do analiz sieciowych.
4.3. MGE (Modular GIS Enviroment)
Jest to modularne
ś
rodowisko GIS pracuj
ą
ce zarówno na wektorowym, jak I
rastrowym modelu danych.
MGE
firmy Intergraph jest najwi
ę
kszym konkurentem
ArcInfro
. Jego najwi
ę
ksz
ą
zalet
ą
jest dobrej jako
ś
ci grafika oraz łatwo
ść
obsługi.
Moduły zawarte w systemie dotycz
ą
szerokiego zakresu zagadnie
ń
, takich jak: analiza
zdj
ęć
satelitarnych i lotniczych, wspomaganie prac geodezyjnych, kartografia,
modelowanie terenu i wspomaganie prac geologicznych.
Wszystkie moduły systemu s
ą
zintegrowane i za ich pomoc
ą
mo
ż
na tworzy
ć
narz
ę
dzia
przeznaczone do konkretnych zada
ń
. Program pracuje zarówno w
ś
rodowisku Unix jaki
i Windows NT. Podstawowym modułem jest
MGE Basic Nucleus
, który słu
ż
y do
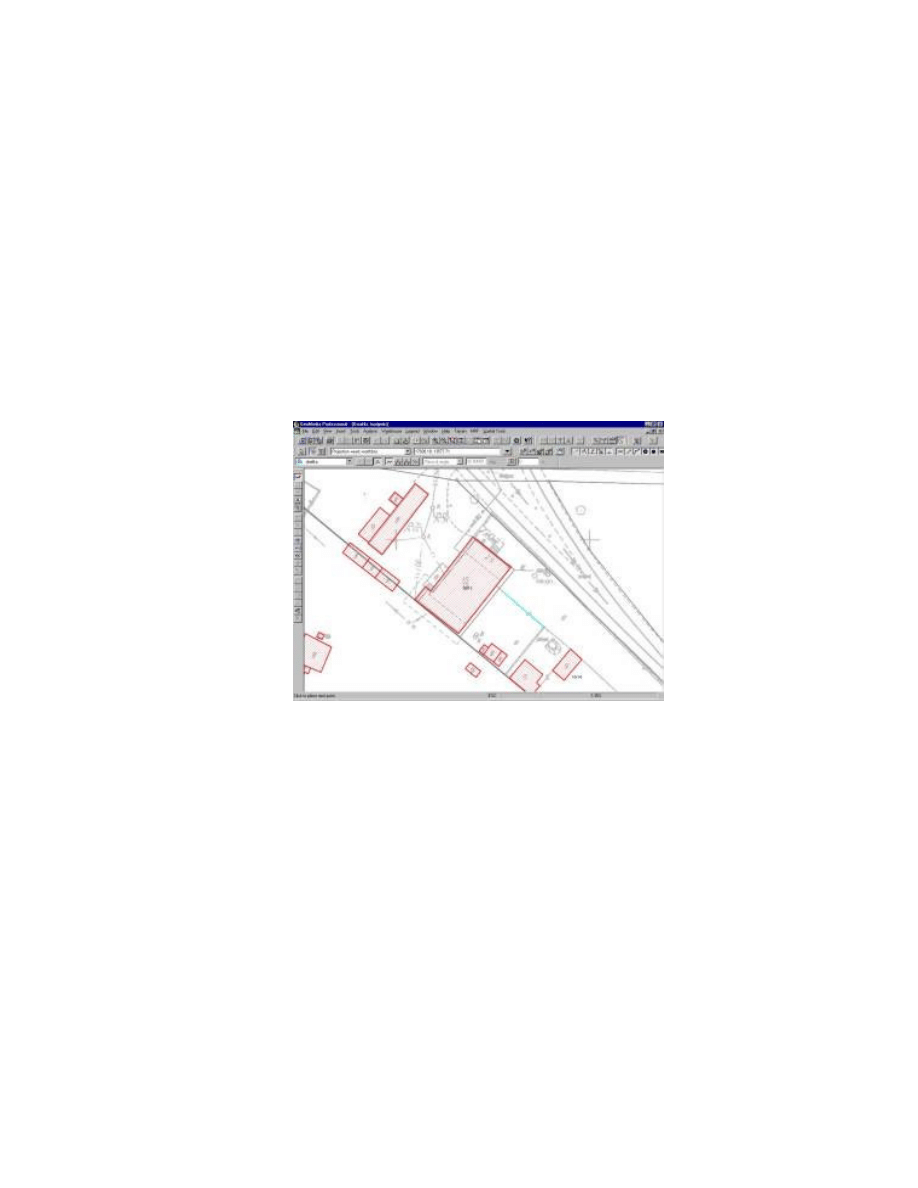
56
tworzenia projektu i wywołania programów zawartych w innych modułach. Kolejne
moduły to:
-
MGE Analyst
– zawiera zestaw funkcji do pracy na danych wektorowych,
przy wykorzystaniu ich topologii(Rysunek 24)
-
MGE GRID Analyst –
zawiera funkcje analizy modelu rastrowego
-
MGE Terrain Modeler
– posiada zestaw funkcji pracuj
ą
cy w modelu
TIN(nieregularnej siatki trójk
ą
tów)
-
MGE Administrator
– moduł zarz
ą
dzania baz
ą
danych w projekcie
-
MGE Base Mapper
– posiada narz
ę
dzia do zbierania i manipulacji danymi
SIP w
ś
rodowisku MGE
Rysunek 24 MGE Analyst [25]
Wykorzystuj
ą
c zewn
ę
trzn
ą
baz
ę
danych(relacyjn
ą
) MGE umo
ż
liwia wybór
dowolnej bazy danych(SQL Server, Oracle, Access, Informix, DB2). Komunikacja
pomi
ę
dzy aplikacjami odbywa si
ę
przy u
ż
yciu RIS(ang.
Relational Interface System)
lub ODBC(ang.
Open Data Base Connection
)
4.4. Microstation GeoGraphics
Jest to oprogramowanie firmy Bentley, które stanowi SIP-ow
ą
wersje CAD-
owsiego programu
Microstation.
Moduł graficzny stanowi uznany program
Mi
crostation,
który
przeznaczony jest głównie do komputerowego wspomagania
projektowania.
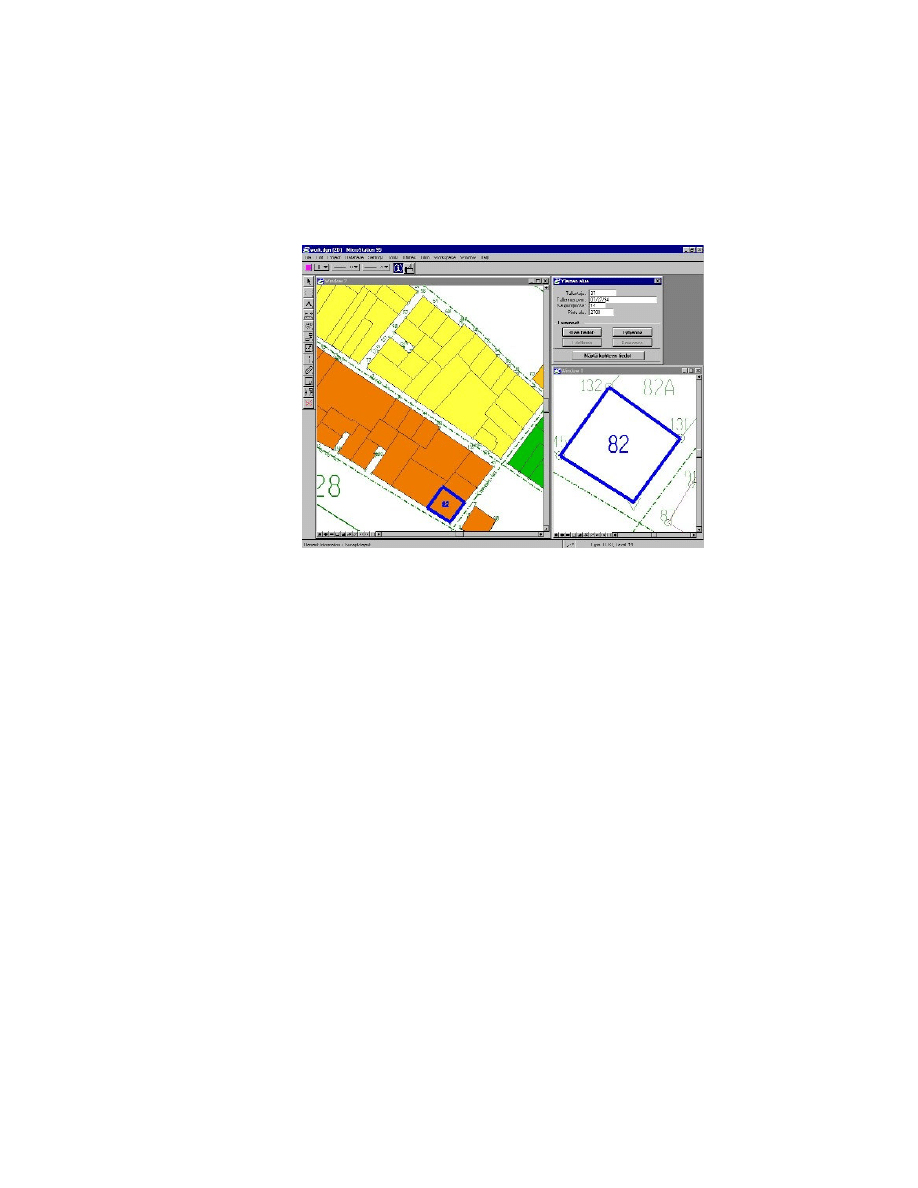
57
GeoGraphics posiada wiele rozszerze
ń
znacznie ułatwiaj
ą
cych korzystanie z baz
danych. W
ś
ród nich s
ą
narz
ę
dzia do wyszukiwania i edycji własno
ś
ci
graficznych obiektów oraz danych opisowych – przez ODBC(Access, SQL
Server, Oracle, Informix).
Rysunek 25. Przykład użycia Microstation Geographics [27]
Razem z pakietem dostarczane s
ą
procedury j
ę
zyka MCL. Daje to dost
ę
p do
wewn
ę
trznych funkcji GeoGraphics i umo
ż
liwia budowanie zupełnie nowych
aplikacji opartych na Microstation. Mo
ż
liwe jest te
ż
tworzenie makr w module
Microstation BASIC.
Niestety program nie posiada mo
ż
liwo
ś
ci przeprowadzania analiz w rodzaju
map tematycznych. Do tych celów słu
ż
y osobna przegl
ą
darka GIS –
Microstation GeoOutlook. Posiada ona wygodne funkcje tworzenia zapyta
ń
SQL, klasyfikacji danych i prezentacji w formie map tematycznych.
4.5. Mapa - 500
Jest to zbiór narz
ę
dzie zwi
ą
zanych z systemem AutoCAD słu
żą
cym do
tworzenia geodezyjnej mapy numerycznej. Podstaw
ą
systemu jest Prototyp Mapa – 500,
który jest rysunkiem AutoCad-u zawieraj
ą
cym definicje wszystkich elementów mapy,
które mog
ą
pojawia
ć
si
ę
na mapie. Aplikacja składa si
ę
z dwóch modułów:
-
GEO_POLA
– umo
ż
liwia wprowadzanie współrz
ę
dnych punktów, ich
poł
ą
cze
ń
oraz wst
ę
pn
ą
weryfikacj
ę
58
-
GEOSECMY -
dowolne obliczenia geodezyjne oparte na danych zawartych
w bazie, tworzy model terenu, generuje warstwice.
4.6. TNTmips
Jest to oprogramowanie firmy MicroImages. Przeznaczony jest głównie do
analizy danych rastrowych. Pracuje na obiektach rastrowych, wektorowych. Program
zawiera szerok
ą
gam
ę
funkcji przydatnych do analizy zdj
ęć
lotniczych i satelitarnych.
Funkcje obsługuj
ą
ce model rastrowy dost
ę
pne s
ą
w pełnym zakresie, natomiast model
wektorowy w ograniczonym.
Rysunek 26. Praca na mapie wektorowej z podkładem rastrowym [28]
Aplikacja pracuje w
ś
rodowisku Unix oraz Windows.

59
Rozdział 5. Założenia systemu EGB2000-SIP
System EGB2000–SIP stanowi moduł systemu Ewidencji Gruntów, Budynków i
Lokali EGB2000. W dalszej cz
ęś
ci tego rozdziału przedstawi
ę
zarys systemu EGB2000
oraz zało
ż
enia systemu realizuj
ą
cego analizy przestrzenne EGB2000-SIP.
5.1. Opis systemu EGB2000
Zgodnie z nowym rozporz
ą
dzeniem Ministra Rozwoju Regionalnego i
Budownictwa z dnia 29.03.2001r. w sprawie ewidencji gruntów i budynków zaistniała
potrzeba prowadzenia ewidencji gruntów i lokali. W tym celu powstał system
EGB2000, który wspomaga operatora w przyporz
ą
dkowaniu budynków i lokali do ich
odpowiednich jednostek rejestrowych oraz zapewnia wgl
ą
d do powi
ą
zanych za sob
ą
gruntów, budynków i lokali.
System EGB2000 funkcjonuje w
ś
rodowisku Windows jako aplikacja klient-serwer
oraz jako system internetowy. Mo
ż
e współpracowa
ć
zarówno z baz
ą
danych SQL
Server 2000 jak i Oracle 9i. Wersja internetowa systemu działa w technologii ASP(ang.
Active Server Pages
) na serwerze internetowym IIS, który wchodzi w skład systemu
Windows NT/2000/XP.
Wersja aplikacyjna(klient-serwer) posiada nast
ę
puj
ą
ce własno
ś
ci:
-
uwzgl
ę
dnia najnowsze przepisy prawne dotycz
ą
ce ewidencji gruntów,
budynków i lokali
-
pozwala na ewidencj
ę
i udost
ę
pnianie informacji o :
o
gruntach, budynkach i lokalach
o
prawach podmiotów i władaj
ą
cych do nieruchomo
ś
ci
o
warto
ś
ci działek, budynków i lokali
-
umo
ż
liwia generowanie du
ż
ej liczby raportów i zestawie
ń
-
zapewnia wysoki stopie
ń
bezpiecze
ń
stwa, zarówno przed nieuprawnionym
dost
ę
pem jak i utrat
ą
danych
-
umo
ż
liwia zadawanie zaawansowanych zapyta
ń
, przegl
ą
danie i drukowanie
uzyskanych danych
-
umo
ż
liwia sporz
ą
dzenie wypisu z rejestru gruntów, budynków i lokali
60
Internetowa wersja systemu została zrealizowana w ramach pracy magisterskiej przy
Zakładzie Systemów Informacyjnych Politechniki Wrocławskiej [16]. System pozwala
uprawnionym jednostkom organizacyjnym i osobom na zdalnym dost
ę
p do danych
ewidencji gruntów w sieci intranet w ramach wybranego urz
ę
du, jak i z dowolnego
miejsca na
ś
wiecie poprzez sie
ć
Internet. Jest to bardzo wygodne rozwi
ą
zanie gdy
ż
nie
wymaga, aby na ka
ż
dym stanowisku była zainstalowana aplikacja, wystarczy jedynie
przegl
ą
darka internetowa. Skraca to równie
ż
czas instalacji systemu oraz obni
ż
a koszty
zwi
ą
zane z przeszkoleniem pracowników. U
ż
ytkownik dostaje dost
ę
p do wybranych
elementów systemu, nie musi si
ę
uczy
ć
zło
ż
onej cz
ęś
ci klient-serwer.
Rysunek 27. Główne okno EGB2000 Internet
System umo
ż
liwia dokonywanie nast
ę
puj
ą
cych operacji:
-
generowanie raportów
-
umo
ż
liwia rzeczoznawcom maj
ą
tkowym zdalne wprowadzanie wycen
nieruchomo
ś
ci

61
-
rejestrowanie oraz logowanie u
ż
ytkownika do systemu. Ka
ż
dy u
ż
ytkownik
jest nadzorowany tzn. zapisywane s
ą
informacje o czynno
ś
ciach, które
wykonywał
-
jednostki i osoby upowa
ż
nione mog
ą
uzyska
ć
nast
ę
puj
ą
ce zestawienia i
raporty:
o
stan wyszukanych jednostek rejestrowych
o
wykaz wła
ś
cicieli i władaj
ą
cych wyszukanych gruntów
o
zestawienie danych dotycz
ą
cych obrotu wyszukanymi
nieruchomo
ś
ciami
Ponadto wersja klient-serwer umo
ż
liwia zobrazowanie danych graficznych w aplikacji
Microstation GeoGraphics firmy Bentley. Microstation udost
ę
pnia du
żą
liczba opcji
zwi
ą
zanych z zarz
ą
dzaniem danymi przestrzennymi a tak
ż
e pozwala za edycj
ę
danych
przestrzennych i ich zapis w bazie danych. Rozwi
ą
zanie to posiada jednak pewn
ą
wad
ę
:
cen
ę
.
Wersja internetowa EGB 2000 pozwala generowa
ć
du
żą
liczb
ę
raportów, jednak nie ma
mo
ż
liwo
ś
ci generowania mapy i prowadzenia analiz. System EGB2000–SIP stanowi
rozszerzenie wersji Internetowej systemu EGB2000 o mo
ż
liwo
ść
zarz
ą
dzania map
ą
numeryczn
ą
. Dodatkow
ą
zalet
ą
systemu jest fakt, i
ż
po niewielkiej modyfikacji sposobu
pobierania danych mo
ż
e zosta
ć
zaimplementowany w wersji klient-serwer systemu. Jest
to mo
ż
liwe dzi
ę
ki temu, i
ż
zbudowany jest w postaci kontrolki ActiveX.
5.2. Cel systemu
Wyobra
ź
my sobie sytuacj
ę
. Pan X posiada pewn
ą
sum
ę
pieni
ę
dzy, za któr
ą
chciałby naby
ć
działk
ę
, na której mógłby wybudowa
ć
dom. Niestety ka
ż
dy z członków
rodziny pana X ma inne upodobania. Pan X chciałby działk
ę
, której powierzchnia
przekracza 200 m kw., natomiast jego
ż
ona chciałaby mieszka
ć
z dala od ruchu
ulicznego. Aby rozwi
ą
za
ć
problem, który tkwi w tym gdzie powinna znajdowa
ć
si
ę
owa
działka, nale
ż
y u
ż
y
ć
systemu SIP, który pozwoli na dokonanie stosownych analiz. Ich
wynikiem b
ę
dzie informacja, dzi
ę
ki której mo
ż
liwe b
ę
dzie podj
ę
cie odpowiedniej
decyzji. Tego typu systemem jest EGB2000–SIP. Na wej
ś
ciu aplikacja dostaje zbiór
obiektów, którym mo
ż
e by
ć
-
zawarto
ść
całego arkusza mapy
62
-
obiekty zawarte w prostok
ą
cie o zadanych wymiarach
-
pojedynczy obiekt wraz z obiektami granicznymi
-
zadana lista obiektów, wraz z obiektami granicznymi
-
wybrane obiekty na tle arkusza
Po czym mo
ż
liwe jest zarz
ą
dzanie danymi zobrazowanymi w postaci mapy i
dokonywanie analiz przestrzennych (szczegółowy wykaz funkcji analitycznych znajdzie
si
ę
w dalszej cz
ęś
ci pracy). Ponadto system posiada szereg mechanizmów, które
ułatwiaj
ą
prac
ę
, jak: powi
ę
kszanie i pomniejszanie obiektów, obroty wokół własnej osi
oraz narz
ę
dzia dodatkowe jak „nawigator”, który ułatwia nawigowanie po mapie przy
du
ż
ej liczbie obiektów.
EGB2000–SIP stanowi alternatywne rozwi
ą
zanie dla aplikacji typu Microstation
GeoGraphics firmy Bentley, czy tez Geomedia firmy Intergraph, których cena wynosi
kilka tysi
ę
cy dolarów. (Szczegółowy wykaz programów wraz z cenami mo
ż
na znale
źć
w zał
ą
czniku B). Posiada przy tym podobn
ą
funkcjonalno
ść
oraz zdolno
ś
ci analityczne.
5.3. Przyjęte założenia
Od strony technicznej zostały przyj
ę
te pewne zało
ż
enia. System reprezentuje
wektorowy model danych, gdzie ka
ż
dy obiekt posiada pewn
ą
okre
ś
lon
ą
lokalizacj
ę
i
jest rozró
ż
nialny. Informacje wy
ś
wietlane na mapie podzielono na poszczególne
warstwy tematyczne, co zapewnia łatwiejsz
ą
obsług
ę
systemu, a jednocze
ś
nie pozwala
na dogł
ę
bne analizowane danych. Mo
ż
na wyró
ż
ni
ć
warstw
ę
: działek, numerów działek,
budynków oraz etykiet. Informacje te tworz
ą
pełn
ą
i warto
ś
ciow
ą
pod wzgl
ę
dem
merytorycznym map
ę
. W pracy skupiłem si
ę
na warstwie działek, na które prowadzone
b
ę
d
ą
wszystkie analizy. Pozostałe elementy tworz
ą
tło, jednak s
ą
niezb
ę
dne dla ka
ż
dej
mapy ewidencyjnej.
Mapa wy
ś
wietlana jest w taki sposób, aby w cało
ś
ci zmie
ś
ci
ć
si
ę
na ekranie
monitora w rozdzielczo
ś
ci 1024x768. Dzi
ę
ki temu tu
ż
po wy
ś
wietleniu, widzimy j
ą
w
cało
ś
ci. Sytuacja ta powoduje, i
ż
skala mapy nie jest zgodna z rzeczywisto
ś
ci
ą
.
Operacja powi
ę
kszania i pomniejszania wykonywana jest procentowo (+-5%).
Utrzymanie dokładnej skali jest niezwykle trudne ze wzgl
ę
du na ró
ż
ne parametry

63
monitorów, rozdzielczo
ść
u
ż
ytkownika. Ukazywanie mapy w wy
ż
ej opisany sposób
wydaje si
ę
słuszne. W przypadku du
ż
ej liczby obiektów mapa jest pomniejszana,
natomiast w sytuacji odwrotnej jest powi
ę
kszana. U
ż
ytkownik od pocz
ą
tku widzi map
ę
w cało
ś
ci, a przy u
ż
yciu dost
ę
pnych narz
ę
dzi mo
ż
e dokonywa
ć
na niej dowolne
operacje
EGB2000–SIP został zaprojektowany do pracy w sieci Intranet, w obr
ę
bie
danego urz
ę
du. W takim
ś
rodowisku mo
ż
liwo
ść
wydostania si
ę
danych poza urz
ą
d, w
którym pracuje system jest znikoma. W przypadku działania przez sie
ć
Internet nale
ż
y
zastanowi
ć
si
ę
, czy bezpiecze
ń
stwem jest wystarczaj
ą
ce. Zastosowano rozwi
ą
zania,
które pozwalaj
ą
na zwi
ę
kszenie ich, jak np.: minimalizacji liczby poł
ą
cze
ń
z baz
ą
danych(szerzej w dalszej cz
ęś
ci pracy). Temat bezpiecze
ń
stwa znakomicie nadaje si
ę
do
dalszego rozwoju pracy.

64
Rozdział 6. Implementacja modułu
internetowego EGB2000–SIP
6.1. Platforma systemowa
System zaprojektowany został do pracy z komputerami klasy PC, które
wyposa
ż
one s
ą
system operacyjny z rodziny Microsoft Windows.
Pracuje w sieci Internet, co sprawia, i
ż
ka
ż
dy u
ż
ytkownik musi posiada
ć
przegl
ą
dark
ę
internetow
ą
(najlepiej Microsoft Internet Explorer), by móc poł
ą
czy
ć
si
ę
z serwerem
oferuj
ą
cym usługi rysowania i analizowania danych przestrzennych.
Na serwerze znajduje si
ę
serwer bazy danych w wersji MS SQL Server 7.0 oraz
Oracle9i.
6.2. Użyte technologie i narzędzia programistyczne
W punkcie tym przedstawi
ę
kluczowe technologie, które zostały u
ż
yte przy
realizacji systemu.
6.2.1. Technologia ASP (ang. Active Server Pages)
System działa w oparciu o technologie ASP, która wykorzystywana jest do
wywołania odpowiedniego zapytania w graficznej bazie wiedzy oraz słu
ż
y do
inicjalizacji obiektu ActiveX.
ASP (ang.
Active Server Pages
)
jest technologi
ą
firmy Microsoft i wchodzi w
skład platformy „Active”. Strony ASP stanowi
ą
element j
ę
zyka HTML, tekstu i komend
j
ę
zyka skryptowego (VBScript, JScript). Wykonywane s
ą
w cało
ś
ci na serwerze
WWW, wi
ę
c gdy u
ż
ytkownik klika w przegl
ą
darce na link do strony z rozszerzeniem
*.asp, serwer przekształca kod skryptu (uwzgl
ę
dniaj
ą
c ewentualne przekazane
parametry) i wysyła do przegl
ą
darki gotow
ą
stron
ę
zawieraj
ą
c
ą
ju
ż
tylko "czysty"
format HTML. Dzi
ę
ki takiemu działaniu cały ci
ęż
ar przetwarzania pozostaje na
serwerze, gdzie dodatkowo przy wykorzystaniu mechanizmów ActiveX, skrypty ASP
mog
ą
pobiera
ć
dane z baz danych oraz wykonywa
ć
inne zadania wymagaj
ą
ce du
ż
ej
mocy lub centralnego przetwarzania.

65
Skrypty ASP obsługiwane s
ą
przez serwer IIS. Du
żą
zalet
ą
tej technologii jest
mo
ż
liwo
ść
wywoływania w prosty sposób obiektów ActiveX oraz DLL.
6.2.2. Bazy danych
Dost
ę
pne s
ą
dwie bazy danych SQL Server oraz Oracle. W zale
ż
no
ś
ci od
potrzeb mo
ż
liwe jest uruchomienie aplikacji na jednym z dwóch wymienionych
systemów bazodanowych. Dlaczego SQL Server i Oracle?
Obecnie s
ą
to jedne z najlepszych i najcz
ęś
ciej stosowanych rozwi
ą
za
ń
. Od lat
trwa walka o prymat w dziedzinie baz danych mi
ę
dzy firm
ą
Microsft i Oracle.
MS SQL Server 2000 jest przeznaczony do pracy w systemie Windows i mo
ż
e by
ć
wykorzystany we wszystkich
ś
rodowiskach sprz
ę
towych, na których funkcjonuje
system operacyjny. Serwer ten oferuje wsparcie dla obiektowej technologii
internetowych baz danych i ich opisu w j
ę
zyku XML oraz przetwarzania transakcyjnego
T-SQL (Transact SQL) przeznaczonego dla technologii XML. System nadaje si
ę
do
tworzenia dowolnie du
ż
ych systemów hurtowni danych, systemów OLAP(ang.
On Line
Analyrtical Processing
) oraz rozwi
ą
za
ń
zaliczanych do Business Inteligence. Obejmuje
to systemy zarz
ą
dzania firmami oraz kontaktami z klientami CRM.
Baza danych Oracle 9i ustanowiła nowy standard w technologii przetwarzania
danych, jakim jest model relacyjno – obiektowy. Nowa metoda definiowania struktur
danych umo
ż
liwia projektantom aplikacji odwzorowanie obiektów
ś
wiata
rzeczywistego, takich jak zamówienia czy stany magazynowe, bezpo
ś
rednio na obiekty
bazy Oracle9i. Taka technika skraca czas produkcji nowych aplikacji i ułatwia
utrzymanie gotowych systemów.
Dzi
ę
ki zastosowaniu bazy Oracle przedsi
ę
biorstwa w pełni wykorzystuj
ą
inwestycje w
rozwój, wdro
ż
enie i utrzymanie systemów informacyjnych przedsi
ę
biorstwa. Oracle9i
zapewnia zintegrowane, bezpieczne i niezawodne
ś
rodowisko tworzenia zarówno
scentralizowanych, jak i rozproszonych, otwartych systemów informacyjnych.
Skalowalna i wysoce niezawodna architektura Oracle9i zapewnia najwy
ż
sz
ą
wydajno
ść
pracy w krytycznych systemach przetwarzania transakcji. Oracle9i optymalnie korzysta
z dost
ę
pnych zasobów systemowych, zarówno na prostych maszynach
jednoprocesorowych, jak równie
ż
na maszynach przetwarzania równoległego SMP i
MPP.

66
6.2.3. Dostęp do bazy danych
Dost
ę
p do bazy danych realizowany jest za pomoc
ą
OLE DB. Jest to interfejs
pomi
ę
dzy dostawc
ą
danych, a aplikacjami klienta.
Kluczow
ą
dla działania OLE DB ide
ą
jest wydzielenie konsumenta i dostawcy (ang.
consumer
i
provider
).
Konsument to nic innego, jak zwykły klient, natomiast dostawca
odpowiedzialny jest za sformatowanie danych do postaci tablicy i przekazanie ich do
klienta.
Dostawca jest zbiorem komponentów COM, zawieraj
ą
cych zestaw interfejsów.
Poniewa
ż
s
ą
to interfejsy standardowe, ka
ż
dy klient OLE DB mo
ż
e czerpa
ć
dane za
po
ś
rednictwem dowolnego providera. Skoro za
ś
dostawcy s
ą
obiektami COM, mo
ż
na
przy tym korzysta
ć
z dowolnych j
ę
zyków (C++, Basic, Java).
Dostawca danych mo
ż
e je dostarcza
ć
w dowolnej postaci – od relacyjnych baz danych,
poprzez arkusze kalkulacyjne do zwykłych plików.
6.2.4. Biblioteka graficzna
Moduł rysuj
ą
cy oraz analizuj
ą
cy dane pochodz
ą
ce z bazy danych został oparta
na dynamicznej bibliotece DLL o nazwie VeCAD ver. 5.2. Mo
ż
na powiedzie
ć
, i
ż
jest
ona sercem całego systemu Biblioteka ta mo
ż
e by
ć
u
ż
ywana z aplikacjami napisanymi
w takich j
ę
zykach jak: Visual Basic, Delphi, C++ oraz Visual C++. Oferuje bardzo
szerok
ą
gam
ę
funkcji umo
ż
liwiaj
ą
cych prac
ę
na obiektach graficznych, np.: rysowanie
linii, poligonu, powi
ę
kszanie, pomniejszanie, które s
ą
niezb
ę
dne przy realizacji systemu
wektorowego. Jej dodatkowym atutem jest niska cena.
6.2.5. Technologia ActiveX i COM
Projekt został wykonany jako system typu WEB-GIS, czyli dost
ę
pny jest z
poziomu przegl
ą
darki internetowej. Aby tego typu operacja była mo
ż
liwa konieczne
było utworzenie kontrolki ActiveX. Stanowi ona serce całego systemu, pozwala na
wy
ś
wietla
ć
dane oraz zawierała mechanizmy dokonuj
ą
ce analiz przestrzennych. Czym
jest technologia ActiveX? Jest to pełnowarto
ś
ciowy program wczytywany z Internetu i

67
uruchamiany na komputerze u
ż
ytkownika. Podstaw
ą
tej technologii jest COM (ang.
Component Object Model
).
Sedno modelu COM polega na umo
ż
liwieniu aplikacjom nawi
ą
zania ł
ą
czno
ś
ci z innymi
aplikacjami COM i wzajemnym wykorzystywaniu przez nie swoich mo
ż
liwo
ś
ci bez
wzgl
ę
du na j
ę
zyk, w jakim je napisano. Wykorzystuj
ą
c technologi
ę
COM mo
ż
na
tworzy
ć
programy typu plug-and-play. Główny moduł programu obsługuje wszystkie
podstawowe funkcje, natomiast elementy dodatkowe wczytywane s
ą
na
ż
yczenie
u
ż
ytkownika. Rozwi
ą
zanie to jest ju
ż
stosowane w Wordzie czy Excelu - przykładem
mo
ż
e by
ć
edytor tabel. Taki sposób tworzenia aplikacji pozwala znacznie zwi
ę
kszy
ć
elastyczno
ść
i u
ż
yteczno
ść
produktów, zmniejszy
ć
koszty wytworzenia oraz skróci
ć
czas kodowania.
Technologie COM mo
ż
na okre
ś
li
ć
jako klej, przy u
ż
yciu, którego budowany jest
Windows i jego aplikacje. Pozwala zł
ą
czy
ć
obiekty pochodz
ą
ce od ró
ż
nych
producentów i wykorzysta
ć
je we własnych aplikacjach.
Sukces tej technologii w rozwi
ą
zaniach lokalnych sprawił, i
ż
zacz
ę
to zastanawia
ć
na
wykorzystaniem tego rozwi
ą
zania w sieci i tym samym zapewnienie tych samych usług.
W ten sposób narodziła si
ę
technologia DCOM, która jest rozproszon
ą
wersj
ą
technologii COM, pracuj
ą
ca w
ś
rodowisku sieciowym. W ten sposób klient mo
ż
e
wywoływa
ć
metody komponentu bez zwracania uwagi na to, gdzie dany komponent si
ę
znajduje. W modelu DCOM klient ł
ą
czy si
ę
z zast
ę
pczym komponentem. Nast
ę
pnie
żą
danie wywołania danej metody zostaje przekazane do prawdziwego obiektu i od
niego wraca wynik działania.
Mo
ż
liwo
ś
ci kontrolek ActiveX z punktu widzenia programisty s
ą
bardzo du
ż
e:
-
mog
ą
robi
ć
wszystko to, co zwykła biblioteka dynamiczna DLL, oprócz
udost
ę
pniania obiektów publicznych innych ni
ż
sama kontrolka oraz nie
wspieraj
ą
wielow
ą
tkowo
ś
ci; kontrolka ActiveX jest jednow
ą
tkowa
-
maj
ą
własny interfejs u
ż
ytkownika wy
ś
wietlany w ramach okna w którym
została osadzona kontrolka. Mo
ż
liwa jest interakcja kontrolki z aplikacj
ą
, w
której została osadzona
-
posiadaj
ą
wsparcie dla standartowych wła
ś
ciwo
ś
ci przegl
ą
darek (ang.
Property browser
)
Podsumowuj
ą
c, kontrolki ActiveX składaj
ą
si
ę
z: komponentów zawieraj
ą
cych kod,
interfejsu u
ż
ytkownika oraz wła
ś
ciwo
ś
ci umo
ż
liwiaj
ą
cych osadzanie.
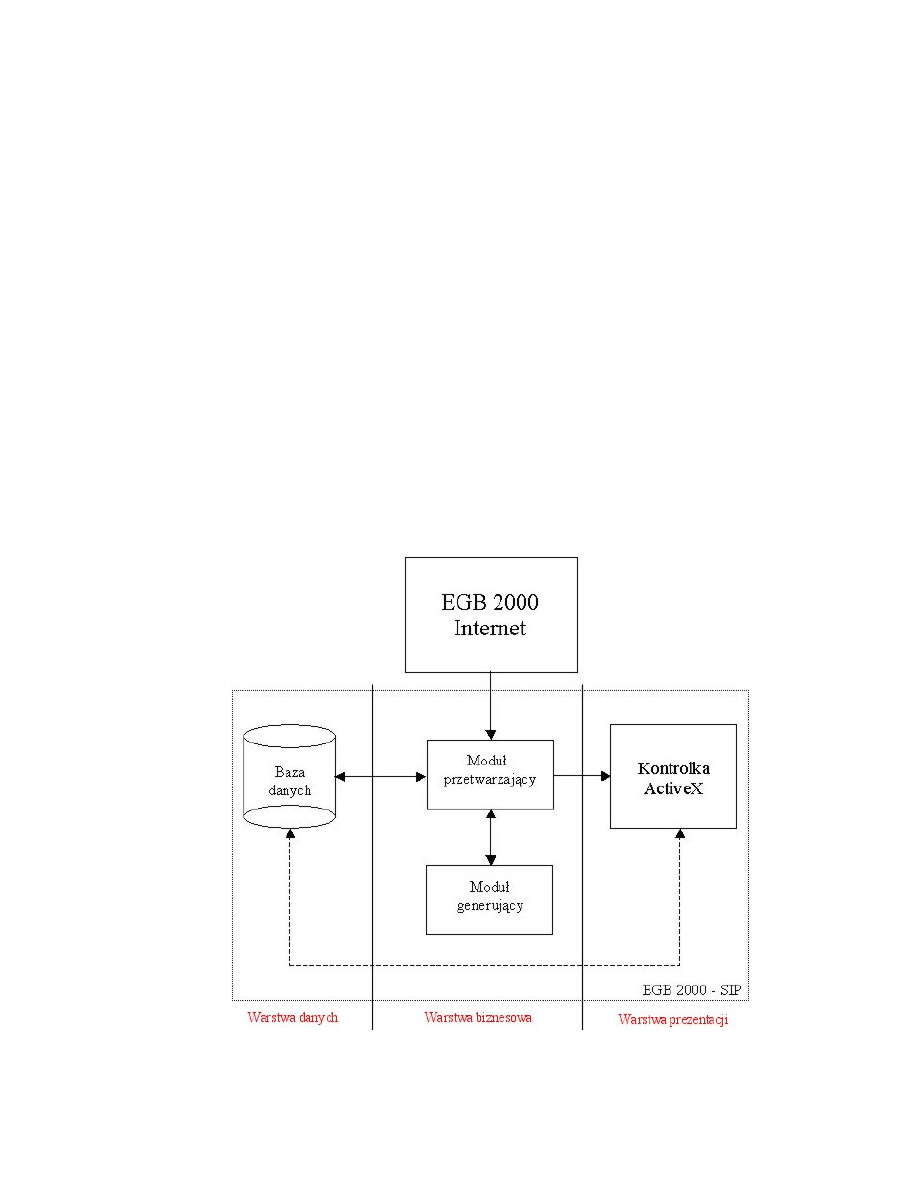
68
Jako narz
ę
dzia programistycznego u
ż
yłem Microsoft Visual Basic 6.0, z pakietu Visual
Studio, który znakomicie nadaje si
ę
do tworzenia obiektów osadzanych.
6.3. Zastosowane rozwiązania
W punkcie tym zaprezentuj
ę
rozwi
ą
zania, jakie przyj
ę
to w realizowanym
systemie.
6.3.1. Sposób działania EGB2000-SIP
System EGB2000-SIP posiada budow
ą
modularn
ą
i składa si
ę
z:
-
bazy danych
-
modułu przetwarzaj
ą
cy
-
modułu generuj
ą
cy
-
kontrolki ActiveX (główna cz
ęść
systemu)
Rysunek 28. Schemat działania systemu EGB2000-SIP

69
Aplikacja internetowa EGB2000 wysyła
żą
danie wy
ś
wietlenia danych
graficznych do modułu przetwarzaj
ą
cego (Rysunek 28) w warstwie biznesowej. W
kolejnym kroku moduł przetwarzaj
ą
cy, zbudowany w technologii ASP wykonuje
odpowiednie zapytanie do bazy danych. Wynikiem jest zbiór rekordów posiadaj
ą
cy
informacje o budowie poszczególnych obiektów oraz ich umiejscowieniu na mapie.
Nast
ę
pnie dane te zostaj
ą
poddany “obróbce” w module generuj
ą
cym (bibliotece
dynamicznej DLL). Z uzyskanych danych generowany jest plik w formacie ASP, gdzie
zawarte s
ą
wszystkie niezb
ę
dne informacje do utworzenia mapy.
W ostatnim etapie, kontrolka ActiveX pobiera dane z pliku wynikowego i na ich
podstawie dochodzi do wygenerowania mapy.
Taki sposób pobierania danych zapewnia du
ż
y stopie
ń
bezpiecze
ń
stwa, gdy
ż
dane przesyłane s
ą
do klienta razem z kontrolka. Komunikacja z baz
ą
danych jest
ograniczona i wyst
ę
puje tylko po stronie serwera. S
ą
jednak przypadki, gdy dochodzi
do poł
ą
czenia z baz
ą
danych z wn
ę
trza kontrolki ActiveX. Wyst
ę
puje to przy
ś
ci
ą
ganiu
szczegółowych informacji o obiektach i analizach na nich. Zastosowanie takiego
rozwi
ą
zanie było konieczne, ze wzgl
ę
du na to, i
ż
przesyłanie tak du
ż
ej liczby informacji
w trakcie generowania kontrolki bardzo mocno spowalniało ładowanie komponentu.
Ponadto na powy
ż
szym rysunku wida
ć
, i
ż
system posiada architektur
ę
trójwarstwow
ą
. Mo
ż
na wyró
ż
ni
ć
nast
ę
puj
ą
ce warstwy: danych, biznesow
ą
, prezentacji.
W pierwszej warstwie dane na temat wszystkich obiektów. W warstwie biznesowej
pobrane dane zostaj
ą
przetworzone na format rozpoznawalny przez kontrolk
ą
ActiveX.
Warstwa prezentacji prezentuje wynik działa z dwóch wcze
ś
niejszych warstw w postaci
mapy numerycznej. Na której prowadzone s
ą
ju
ż
wewn
ę
trzne analizy.
6.3.2. Baza danych
Baza danych systemu EGB2000 została podzielona na dwie cz
ęś
ci: cz
ęść
graficzn
ą
oraz cz
ęść
opisow
ą
. Pierwsza z nich zawiera informacje o budowie obiektów
tworz
ą
cych map
ę
, natomiast cz
ęść
opisowa przechowuje informacje opisuj
ą
ce grunty,
budynki oraz lokale. Jak ju
ż
wcze
ś
niej wspomniano dost
ę
pne s
ą
dwa systemy
bazodanowe: SQL Server oraz Oracle. Struktura bazy danych w obu przypadkach jest
identyczna, zmienia si
ę
jedynie metoda poł
ą
czenia z baz
ą
danych. Jest to mo
ż
liwe
dzi
ę
ki temu, i
ż
wszystkie zapytania zastały napisane w taki sposób, by obsłu
ż
y
ć
oba
systemu (zapytania zgodne z ANSI SQL).

70
Poni
ż
ej przedstawi
ę
tabele, które dodałem do systemu oraz tabele, które były dla mnie
kluczowe przy tworzeniu cz
ęś
ci SIP’owej systemu.
Wykaz najwa
ż
niejszy tabel z punktu widzenia analiz przestrzennych:
•
G_DzialkiNaglowki(
IdDzialki, IdGminy, IdObrebu, Arkusz, NazwaUlicy,
NrDomu, NrDzialki, Xnrdz, Ynrdz, NazwaWlasnaDzialki, Xnazdz, Ynazdz,
Knazdz,
NrAdresowyDzialki)
Tabela zawiera identyfikatory wszystkich działek, jakie znajduj
ą
si
ę
w
systemie. Dodatkowo dla ka
ż
dej działki okre
ś
lone s
ą
takie informacje jak
arkusz, gmina oraz obr
ę
b. Pola
NrDzialki, Arkusz, Gmina, Obreb
stanowi
ą
klucz, który ł
ą
czy baz
ę
danych graficznych z baz
ą
danych opisowych systemu
EGB2000.
•
G_DzialkiGraniczniki(
IdDzialki, IdGranicznika, Kolejnosc
)
Tabela okre
ś
laj
ą
ca zale
ż
no
ś
ci pomi
ę
dzy identyfikatorem działki a jej
granicznikam oraz kolejno
ść
graniczników. Pole
Kolejnosc
okre
ś
la kolejno
ść
graniczników w działce i niezb
ę
dne w procesie tworzenia obiektów.
•
G_Graniczniki(
IdGranicznika, Xgranicz, Xgranicz, Ygranicz, NrGranicznika,
CzyStabilizowany, CzyGranicaPanstwa, Status, DataWpisuG, OperatorWpisuG,
DataSkasowaniaG, OperatorSkasowaniaG, DataWpisuO, OperatorWpisuO,
DataSkasowaniaO, OperatorSkasowaniaO)
Tabela zawiera graniczniki, z których budowane s
ą
działki. Pola
Xgranicz
oraz
Ygranicz
okre
ś
laj
ą
współrz
ę
dne granicznika w dwuwymiarowym układzie
współrz
ę
dnych. Dodatkowo tabela posiada szereg dodatkowych parametrów,
które nie s
ą
u
ż
ywane w systemie EGB2000–SIP, ale maj
ą
zastosowanie w
przypadku współpracy aplikacji EGB2000 z programem Microstation
GeoGraphics, gdzie mo
ż
liwa jest edycja danych.
•
G_GraniceGraniczniki(
IdGranicyD, IdGranicznika, LpGranicznika
)

71
W tabeli tej zawarte s
ą
informacje o tym czy granicznik tworzy wi
ę
cej ni
ż
jedn
ą
granic
ę
. Informacja ta umo
ż
liwia prawidłowe skonstruowanie obiektu na
ekranie. Gdy
ż
bardzo cz
ę
sto wyst
ę
puje sytuacja, w której jeden granicznik mo
ż
e
wchodzi
ć
w skład kilku działek. Wyst
ę
puje to w przypadku, gdy działki s
ą
do
siebie przyległe. Pole
LpGranicznika
okre
ś
la, który w kolejno
ś
ci jest to
granicznik.
•
Obreby(
IdObrebu,IdGminy,KodObrebu, NazwaObrebu, CzyDzialkiWArkuszach,
PowEwidencyjna, Miasto_Wies
)
Tabela zawiera definicje obr
ę
bów wchodz
ą
cych w skład Gminy. Ka
ż
dy
obr
ę
b ma takie parametry jak: nazwa, powierzchnie ewidencyjn
ą
, a tak
ż
e nazwa
miasta lub wsi, w której wyst
ę
puje.
•
Gminy(
IdGminy, KodGminy, NazwaGminy, Miasto_Wies, PowEwidencyjna,
Powiatu, NazwaPowiatu, IdWojew, NazwaWojew
)
Zawiera wykaz Gmin, którymi posługuje si
ę
system. Ka
ż
da z gmin ma
zdefiniowan
ą
nazw
ę
, powierzchni
ę
ewidencyjn
ą
, nazw
ę
powiatu oraz
województwa.
•
G_Classification(
id_classyfiaction, id_dzialki, id_type, ival, fval, sval
)
Tabela okre
ś
la warto
ś
ci, jakie przyjmuj
ą
poszczególne rodzaje klasyfikacji
wykorzystywane w procesie analizy danych. Mo
ż
liwe s
ą
warto
ś
ci typu:
całkowitego(
ival
), rzeczywistego(
flav
) oraz w postaci ci
ą
gu znakowego(
sval
).
Dzi
ę
ki temu tabela ma charakter uniwersalny i mo
ż
e przyjmowa
ć
ka
ż
dy typ
danych.
•
G_Classification_type (
id_type
,
name, status
)
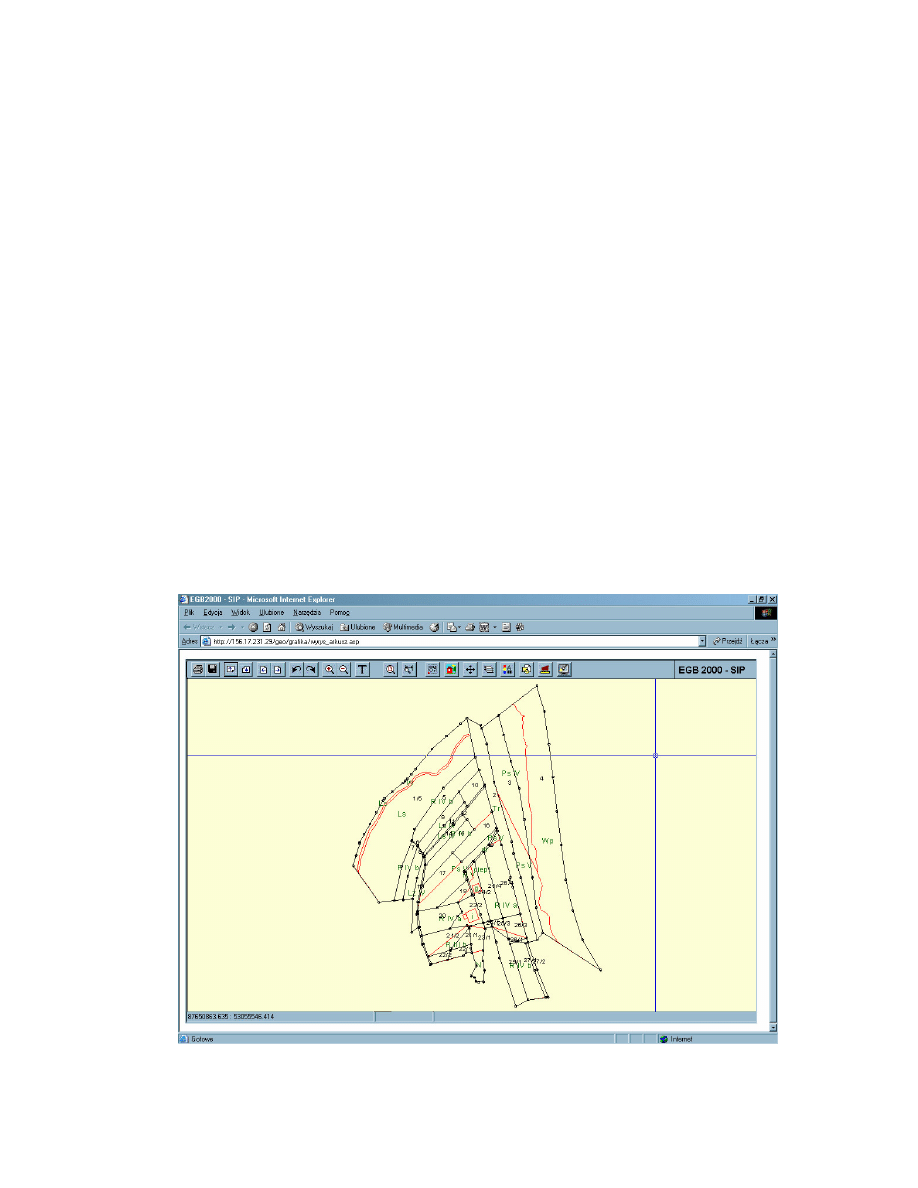
72
W tabeli tej definiowane s
ą
nowe rodzaje klasyfikacji. Pole
status
oznacza
czy dany typ klasyfikacji ma by
ć
dost
ę
pny dla u
ż
ytkownika systemu.
Ponadto w systemie istnieje znacznie wi
ę
cej dodatkowych tabel, których nie
wymieniłem.
6.4. Implementacja funkcji analitycznych systemu EGB2000–
SIP
Główne okno programu przedstawia map
ę
numeryczn
ą
, na której widoczne s
ą
:
-
działki - kolor czarny
-
numery działek – symbole koloru czarnego
-
budynki - kolor czerwony
-
etykiety – symbole koloru zielonego
Ka
ż
dy z tych elementów umieszczony jest na innej warstwie. W górnej cz
ęś
ci
głównego okna znajduje si
ę
pasek narz
ę
dziowy. W lewym dolnym roku umieszczone s
ą
współrz
ę
dne wska
ź
nika myszki, co ułatwia nawigowanie po mapie.
Rysunek 29. Główne okno programu EGB2000–SIP
73
Ze wzgl
ę
du na mnogo
ść
obiektów, przy nast
ę
pnych rysunkach pochodz
ą
cych z systemu
warstwa budynków i etykiet nie b
ę
dzie wy
ś
wietlana, co zapewni lepsz
ą
widoczno
ść
.
EGB2000-SIP oferuje podstawowe funkcje analityczne, jakie posiada ka
ż
dy z
systemów klasy SIP. Ze wzgl
ę
du na ich du
żą
licz
ę
podzieliłem je na dwie cz
ęś
ci:
analizy zewn
ę
trzne realizowane w module przetwarzaj
ą
cym oraz analizy wewn
ę
trzne
wykonywane w komponencie na mapie numerycznej.
6.4.1. Analizy zewnętrzne
Jako analizy wewn
ę
trzne nale
ż
y rozumie
ć
operacje wykonywane po stronie
serwera na bazie danych w warstwie biznesowej. Polegaj
ą
one na zadaniu
odpowiedniego zapytania do bazy danych, którego wynikiem jest zbiór danych.
Nast
ę
pnie dane te s
ą
prezentowane w postaci mapy numerycznej.
Mo
ż
na wyró
ż
ni
ć
nast
ę
puj
ą
ce rodzaje analiz wewn
ę
trznych:
•
pobranie arkusza danych
Operacja ta polega na wybraniu wszystkich danych z arkusza. Jako dane
wej
ś
ciowe nale
ż
y poda
ć
: gmin
ę
, obr
ę
b oraz arkusz. Wynikiem jest mapa
numeryczna ukazuj
ą
ca wszystkie obiekty zawarte w wybranym arkuszu.
Rysunek 30. Wyświetlenie arkusza danych.
74
•
wybrane działki z arkusza
Operacja ta polega na pobraniu działek z arkusza spełniaj
ą
cych okre
ś
lone
kryteria wyszukiwania. Dodatkowo istnieje mo
ż
liwo
ść
okre
ś
lenia, które z
wyszukanych działek b
ę
d
ą
wyodr
ę
bnione na mapie.
Wynikiem jest mapa numeryczna prezentuj
ą
ca arkusz, na którym wyszukane
działki oznaczone s
ą
szrafur
ą
.
Rysunek 31. Arkusz z wybranymi dzialkiami.
Kryteria wyszukiwania działek:
-
Pola obowi
ą
zkowe (Gmina, Obr
ę
b, Arkusz)
-
Pola opcjonalne
o
Kryteria podmiotowe (Osoba fizyczna/prawna, Regon/Pesel,
Nazwisko, Imi
ę
, Nr jednostki rejestrowej, Nazwa skrócona)
o
Kryteria przedmiotowe (Ulica, Nr domu, Działka, Powierzchnia od –
do, KW działki)
75
•
pojedyncza działka z otoczeniem
Operacja ta polega na pobraniu pojedynczej działki wraz z działkami j
ą
otaczaj
ą
cymi. Jako dane wej
ś
ciowe nale
ż
y poda
ć
: gmin
ę
, obr
ę
b, arkusz oraz
numer działki. Wynikiem jest mapa numeryczna prezentuj
ą
ca działk
ę
szukan
ą
oraz działki do niej przyległe. Działka szukana oznaczona jest szrafur
ą
.
Rysunek 32. Pojedyncza działka z otoczeniem.
•
jednostka rejestrowa
Jako jednostk
ę
rejestrow
ą
nale
ż
y rozumie
ć
wi
ę
cej ni
ż
jedn
ą
działka. Proces
analizy polega na wy
ś
wietleniu listy działek wraz z ich otoczeniem. Z tym,
ż
e
działki mog
ą
pochodzi
ć
z odr
ę
bnych arkuszy.
Jako dane wej
ś
ciowe nale
ż
y poda
ć
gmin
ę
oraz obr
ę
b. Po czym okre
ś
la si
ę
jednostk
ę
rejestrow
ą
, która ma zosta
ć
wy
ś
wietlona w postaci mapy
numerycznej.
Działki wy
ś
wietlane w ramach jednostki rejestrowej bardzo cz
ę
sto s
ą
rozrzucone
po mapie. W takim przypadku niezwykle przydatne okazuje si
ę
narz
ę
dzie
nawigator, które pozwala na du
żą
swobod
ę
przy poruszaniu si
ę
na mapie(wi
ę
cej
o tym narz
ę
dzi u dalszej cz
ęś
ci pracy).
76
Rysunek 33. Jednostka rejestrowa.
•
według współrz
ę
dnych
Operacja sprowadza si
ę
do pobrania i wy
ś
wietlenia działek wchodz
ą
cych w
skład prostok
ą
ta o zadanych współrz
ę
dnych. Działka zawarta jest w prostok
ą
cie,
je
ż
eli którakolwiek z granic znalazła si
ę
w zadanym obszarze. Jako dane
wej
ś
ciowe nale
ż
y poda
ć
: gmin
ę
, obr
ę
b, arkusz oraz współrz
ę
dne
prostok
ą
ta(dwóch przeciwległych ko
ń
ców). Wynikiem jest mapa numeryczna z
działkami, które jedn
ą
z granic przeci
ę
ły si
ę
z prostok
ą
tem.
Rysunek 34. Działki zawarte w prostokącie o zadanych wymiarach.
77
6.4.2. Analizy wewnętrzne
Tworzenie i wyświetlanie obiektów
System EGB2000-SIP jest systemem wektorowym opieraj
ą
cym si
ę
na
obiektach. Ka
ż
dy element na mapie jest rozró
ż
nialny i posiada swoje własno
ś
ci, co
zapewnia szybko
ść
działania oraz mo
ż
liwo
ść
prowadzenia ró
ż
norodnych analiz
przestrzennych.
Dane graficzne, które „przychodz
ą
” do kontrolki ActiveX dzielone s
ą
na
warstwy oraz kolekcje. Ka
ż
da z warstw reprezentuje inny rodzaj obiektów;
wyró
ż
niamy:
-
warstw
ę
działek
-
warstw
ę
numerów działek
-
warstw
ę
budynków
-
warstw
ę
etykiet
Na ka
ż
dej z wymienionych warstw rysowane s
ą
odr
ę
bne obiekty, które reprezentuj
ą
topologiczny model danych.
Pojedyncza działka jest polygonem, który zbudowany jest z graniczników poł
ą
czonych
liniami prostymi, natomiast numery działek s
ą
etykietami tekstowymi.
Nowo utworzony obiekt dodawany jest do kolekcji reprezentuj
ą
cej pojedyncz
ą
warstw
ę
. Taka kolekcja zawiera identyfikator obiektu pochodz
ą
ce z bazy danych oraz
identyfikator biblioteki VeCAD, dzi
ę
ki któremu mo
ż
liwe b
ę
dzie pó
ź
niejsze
zlokalizowanie obiektu.
Wskazywanie
Jest to jeden z prostszych sposobów analizy. Sprowadza si
ę
do najechania
przez u
ż
ytkownika na wybrany obiekt, w tym przypadku działk
ę
. Po dwukrotnym
klikni
ę
ciu na obiekt zmienia on barw
ę
i ukazuje si
ę
dodatkowe okienko z informacjami
o tym obiekcie (Rysunek 35).
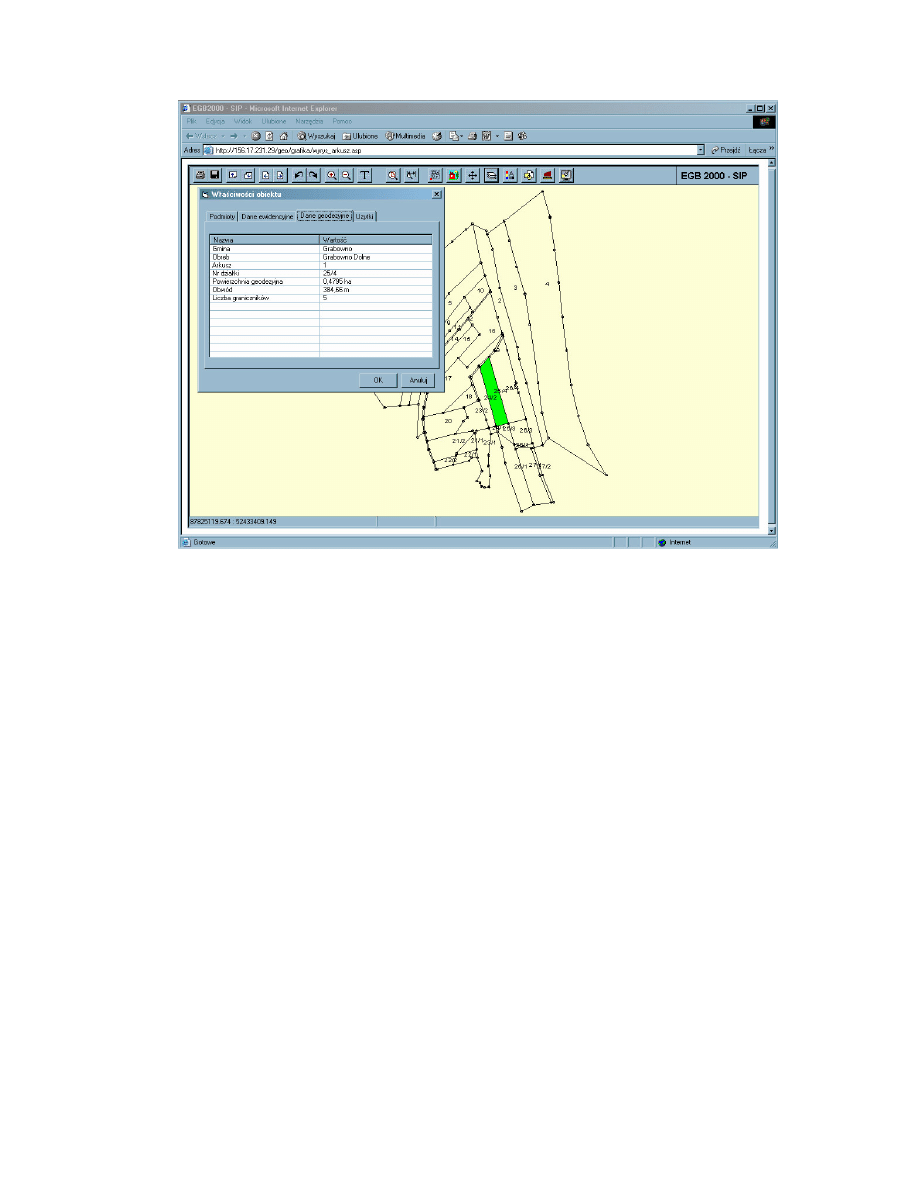
78
Rysunek 35. Przykład użycia funkcji wskazywania w systemie.
Dane o działce zostały podzielone na cztery odr
ę
bne zakładki:
-
podmioty
Osoby fizyczne lub prawne, które mog
ą
mie
ć
prawa i obowi
ą
zki. Osoby te
maj
ą
pewne
ś
ci
ś
le wydzielony udział w wybranej działce. Dost
ę
pne
informacje to: charakter władania, udział, grupa rejestrowa, nazwisko lub
nazwa.
-
dane ewidencyjne
S
ą
to informacje maj
ą
ce charakter ogólny, nale
żą
do nich: nazwa gminy,
nazwa obr
ę
bu, numer arkusza, numer działki, jednostka rejestrowa, ulica,
numer domu, powierzchnia ewidencyjna, KW, warto
ść
, data okre
ś
lenia
warto
ś
ci, rejestr zabytków oraz rejon statystyczne.
-
dane geodezyjne
Informacje maj
ą
charakter
ś
ci
ś
le geodezyjna, a s
ą
to: nazwa gminy, nazwa
obr
ę
bu, nr działki, powierzchnia geodezyjna, liczba graniczników.
79
-
u
ż
ytki
Dane dodatkowe na temat samego obiektu, które stanowi
ą
etykiet
ę
działki;
oznaczenie konturu, oznaczenie sposobu u
ż
ytku, powierzchnia konturu.
Od strony technicznej działanie funkcji przedstawia si
ę
nast
ę
puj
ą
co:
•
krok 1 : pobranie pozycji myszki z ekranu przegl
ą
darki internetowej. Do tego
celu posłu
ż
yła biblioteka VeCAD. Zbudowałem funkcj
ę
o nazwie
DwgProc
, z
nast
ę
puj
ą
cymi atrybutami:
o
hDwg –
identyfikator osadzonego obiektu VeCAD
o
Msg
– typ funkcji, jaka ma zosta
ć
wykonana. W tym przypadku jest to
VM_LBDBLCLK, która pobiera pozycj
ę
myszki po dwukrotnym
klikni
ę
ciu
o
Prm1 – Prm5 –
dodatkowe parametry, które nale
ż
y przekaza
ć
do funkcji
identyfikowanej przez
Msg.
•
kroku 2: nale
ż
y sprawdzi
ć
czy pobrany punkt o współrz
ę
dnych (x,y) znajduje
si
ę
wewn
ą
trz jednego z wy
ś
wietlonych obiektów. Proces ten realizuje funkcja
PointInPolygon,
z nast
ę
puj
ą
cymi atrybutami:
o
x
– współrz
ę
dna x ekranu
o
y
– współrz
ę
dna y ekranu
o
poly
– identyfikator obiektu
Wyszukiwanie działek
W systemie istniej
ą
dwa rodzaje wyszukiwania:
•
wyszukiwanie wg numerów
Wyszukiwanie według numerów polega na wyszukaniu na mapie działki o
zadanym numerze. Funkcja daje mo
ż
liwo
ść
zdefiniowania koloru oznaczenia
oraz typu oznaczenia działki(wypełnienie lub szrafura); Rysunek 36.
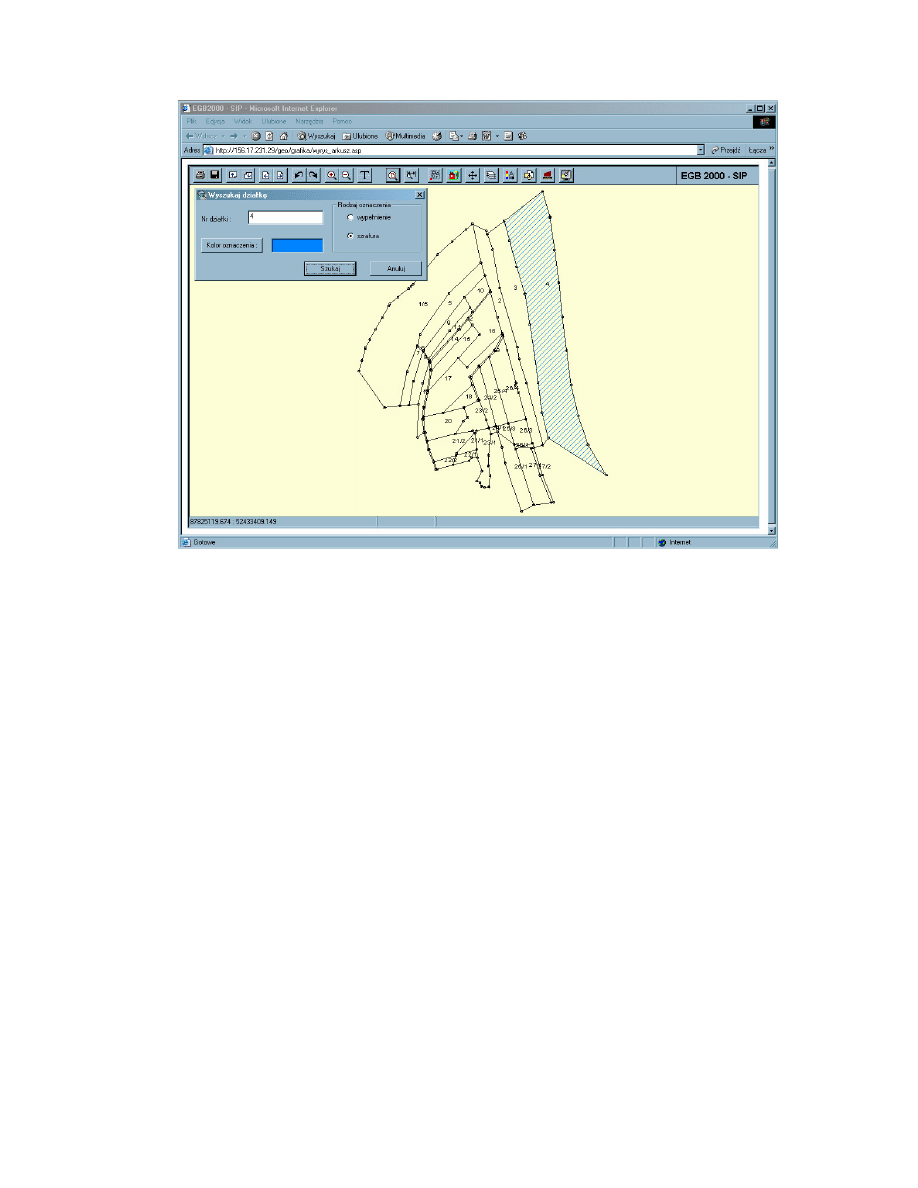
80
Rysunek 36. Wyszukiwanie wg numerów; działka o numerze 4.
Funkcja wykonywana jest w kilku etapach:
-
z bazy danych pobierany jest identyfikator działki o zadanym numerze
-
w kolekcji reprezentuj
ą
cej warstw
ę
działek wyszukiwany jest element o
identyfikatorze pobranym z bazy danych.
-
wyszukana działka posiada identyfikator programowy, dzi
ę
ki któremu
mo
ż
liwa jest lokalizacja obiektu na mapie
-
oznaczenie działki wybranym kolorem i typem oznaczenia
Mechanizm jest bardzo pomocny i przydatny, poniewa
ż
na dowolnie du
ż
ej
mapie pozwala zlokalizowa
ć
działk
ę
, która interesuje u
ż
ytkownika. Wystarcz
poda
ć
numer działki, wybra
ć
kolor i typ selekcji, a system sam zaznaczy działk
ę
.
•
Wyszukiwanie wg powierzchni (selektywne wyszukiwanie)
Jest to operacja polegaj
ą
ca na wybraniu działek, których powierzchnia spełnia
pewne kryterium. Mo
ż
liwe kryteria wyszukiwania wg powierzchni to
powierzchnia:
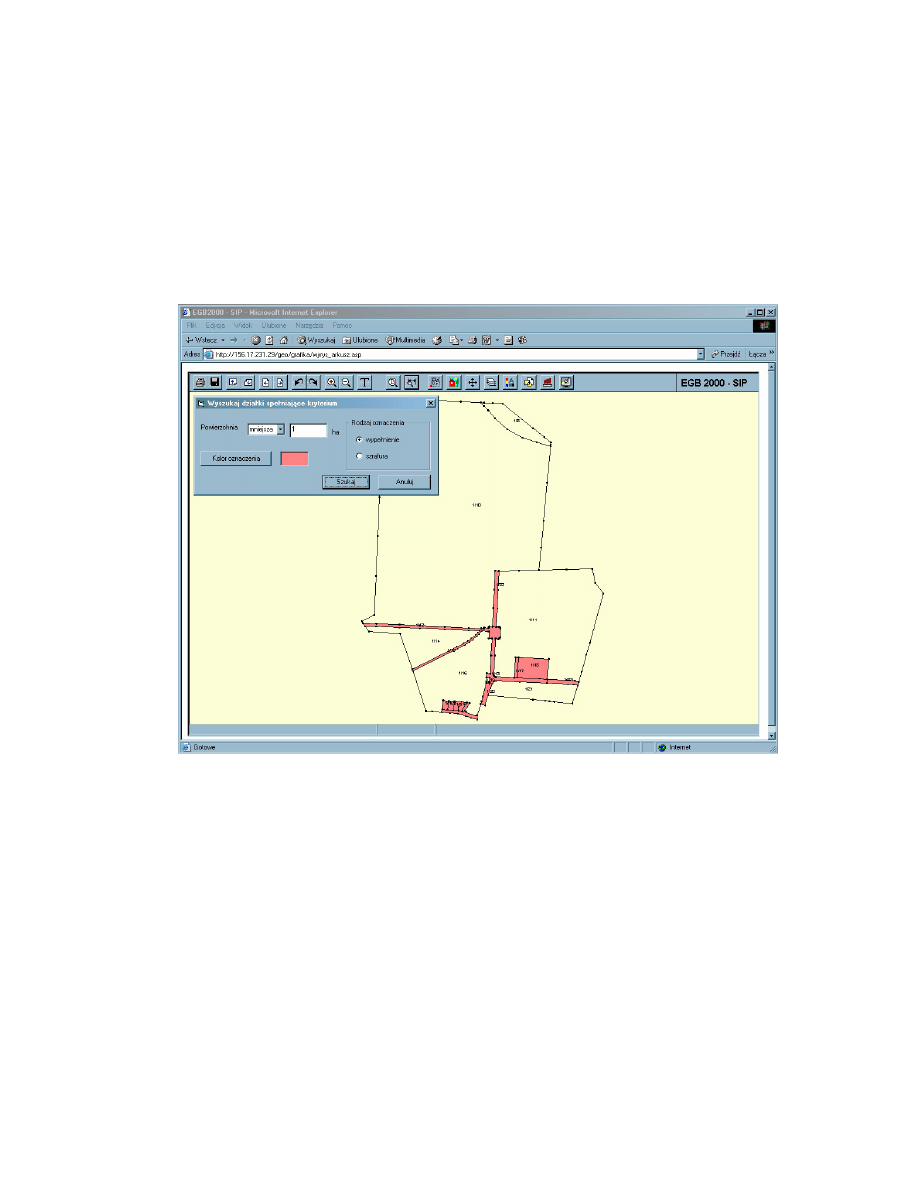
81
-
równa,
-
wi
ę
ksza,
-
mniejsza
od zadanej warto
ś
ci. Jednostk
ą
obliczeniow
ą
jest tu hektar. Podobnie jak w
przypadku wyszukiwania wg numerów, istnieje mo
ż
liwo
ść
wybrania koloru oraz
rodzaju oznaczenia (Rysunek 37).
Rysunek 37. Wyszukane działek, których powierzchnia jest mniejsza od jednego hektara.
Analiza realizowana jest w nast
ę
puj
ą
cych krokach:
-
u
ż
ytkownik definiuje kryterium wyszukiwania, kolor oraz typ oznaczenia
-
dla ka
ż
dej z działek sprawdzana jest powierzchnia; w przypadku spełnienia
warunku okre
ś
lonego jako kryterium, obiekt zostaje oznaczony we wcze
ś
niej
zdefiniowany sposób
Operacja ta nale
ż
y do analiz pomiarowych. Jest pomocna w przypadku, gdy
u
ż
ytkownika interesuj
ą
działki o okre
ś
lonej powierzchni, przykładem mo
ż
e by
ć
poszukiwane terenów pod budow
ę
supermarketów czy te
ż
osiedli.
82
Klasyfikacja
Klasyfikacja polega na podziale obiektów na klasy. W systemie EGB2000–SIP
istnieje mo
ż
liwo
ść
prowadzenia klasyfikacji działek na mapie według jednego z
dost
ę
pnych kryteriów. Dodatkowo operacja ta została wzbogacona o kilka dodatkowych
elementów, jak wybór
ź
ródła klasyfikacja, co zapewnia jej wi
ę
ksz
ą
elastyczno
ść
i
skuteczno
ść
.
Funkcja realizowana jest w kilku krokach:
-
wybór
ź
ródła danych
Zanim proces klasyfikacji zostanie uruchomiony nale
ż
y okre
ś
li
ć
ź
ródło
danych do klasyfikacji(Rysunek 38).
Ź
ródłem tym jest tabela systemowa.
Zastosowałem takie rozwi
ą
zanie w celu zapewnienia wi
ę
kszej elastyczno
ś
ci
dla funkcji analitycznych. Dzi
ę
ki temu ka
ż
dy urz
ą
d(u
ż
ytkownik) mo
ż
e
dosta
ć
odr
ę
bn
ą
tabel
ę
z własnymi rodzajami klasyfikacji. W tym przypadku
jest to tabela
G_Classification
, która mo
ż
e mie
ć
dowoln
ą
nazw
ę
. Posiada
uniwersaln
ą
budow
ę
, co pozwala na trzymanie danych ka
ż
dego typu,
zarówno liczbowe jak i znakowe.
Tabela ta powi
ą
zana z tabel
ą
G_Classification_Type
, która jest słownikiem z
nazwami rodzajów klasyfikacji. Jej nazwa jest stała. Tutaj mo
ż
na doda
ć
now
ą
klasyfikacj
ę
, a w tabeli
G_Classification
(nazwa opcjonalna) umie
ś
ci
ć
warto
ś
ci tej klasyfikacji dla poszczególnych działek
Rysunek 38. Wybór źródła danych do klasyfikacji.
-
wybór kryteria klasyfikacji oraz sposobu oznaczenia
Po zdefiniowaniu nazwy tabeli nale
ż
y wybra
ć
jeden z typów klasyfikacji,
które zostały pobrane z bazy danych. Konieczne jest równie
ż
wybranie
sposobu oznaczania działek tzn. wypełnienie, szrafura.
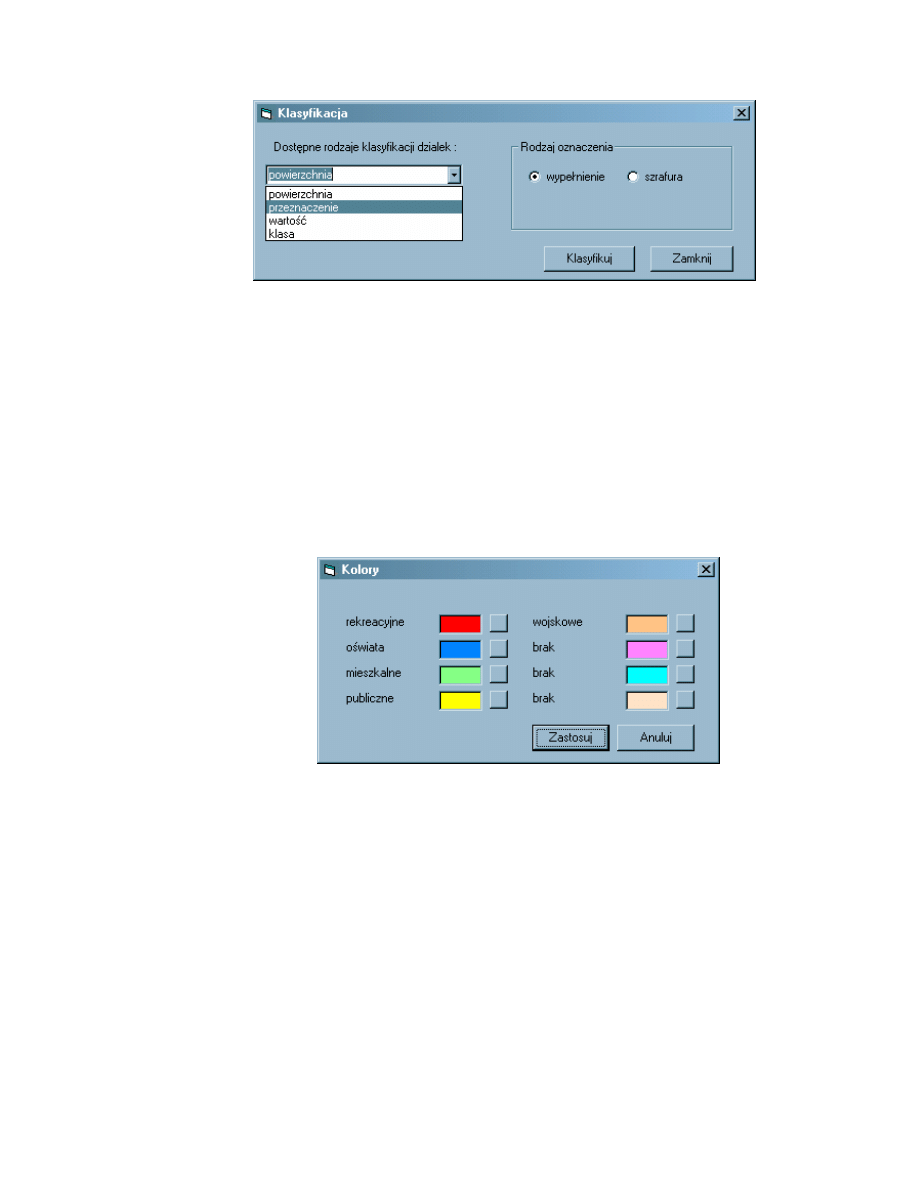
83
Rysunek 39. Wybór klasyfikacji i typu oznaczenia działek.
-
okre
ś
lenie kolorystyki
W ostatnim etapie dla ka
ż
dej z warto
ś
ci klasyfikacji przypisywany jest
domy
ś
lny kolor, który u
ż
ytkownik mo
ż
e zmieni
ć
. Maksymalnie mo
ż
e by
ć
osiem ró
ż
nych warto
ś
ci dla klasyfikacji. Ograniczenie to zostało nało
ż
one w
celu zwi
ę
kszenia czytelno
ś
ci mapy, gdy
ż
zbyt du
ż
a liczba kolorów na mapie
sprawiała, i
ż
mapa była niewyra
ź
na.
Rysunek 40. Wybór gamy kolorów dla klasyfikacji wg przeznaczenia działek.
Efektem jest mapa poddana klasyfikacji. Działki, dla których zdefiniowano klasyfikacj
ę
przyjmuj
ą
okre
ś
lony kolor, natomiast działki niesklasyfikowane maj
ą
kolor tła.
Obok klasyfikacji pobieranych z bazy dodano klasyfikacj
ę
wg powierzchni. Po
wyborze tej opcji u
ż
ytkownik musi okre
ś
li
ć
typ oznaczenia, przedziały powierzchniowe
oraz kolorystyk
ę
.
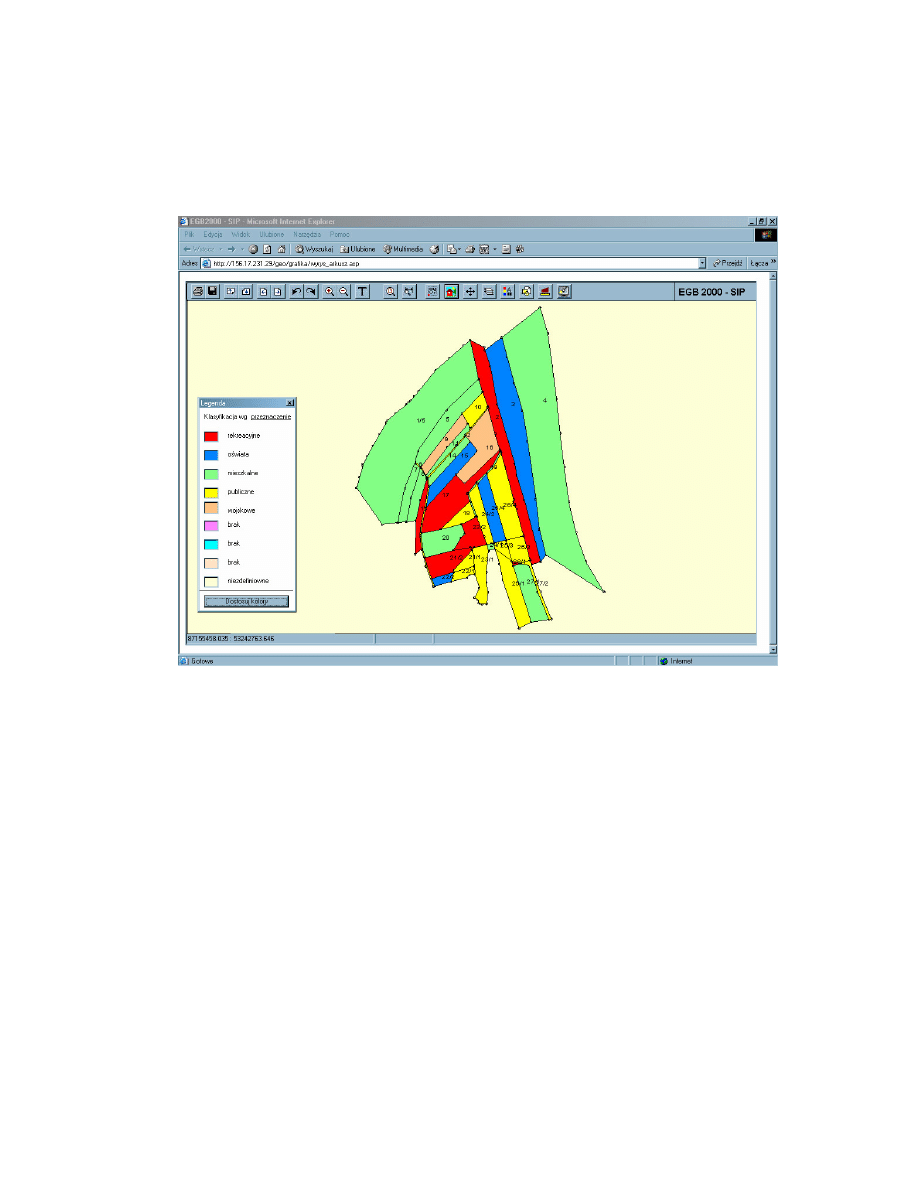
84
Po dokonaniu ka
ż
dej z klasyfikacji wy
ś
wietlana jest legenda informuj
ą
ca o znaczeniu
poszczególnych kolorów na mapie. W tym momencie nadal mo
ż
emy zmodyfikowa
ć
kolorystyk
ę
dla wybranej warto
ś
ci.
Rysunek 41. Klasyfikacja mapy wg przeznaczenia.
Samodzielne kolorowanie mapy
Czasem zachodzi potrzeba dokonania samodzielnych oznacze
ń
kolorystycznych
dla niektórych działek np.: dokonano klasyfikacji czy te
ż
wyszukania działek, ale
dodatkowo zaszła potrzeba oznaczenia niektórych działek zupełnie innym kolorem. W
takiej sytuacji przydatna staje si
ę
opisywana funkcja.
Sposób jej działania wygl
ą
da nast
ę
puj
ą
co:
-
na pocz
ą
tku nale
ż
y aktywowa
ć
funkcj
ę
. Jest to konieczne w celu wył
ą
czenia
oznacze
ń
stosowanych przy jednokrotnym i dwukrotnym klikni
ę
ciu na
działk
ę
. W przeciwnym razie dochodziłoby do nakładania na siebie warstw
kolorystycznych
-
wybór koloru oraz sposobu oznaczenia
-
oznaczanie działek przez klikanie na nie
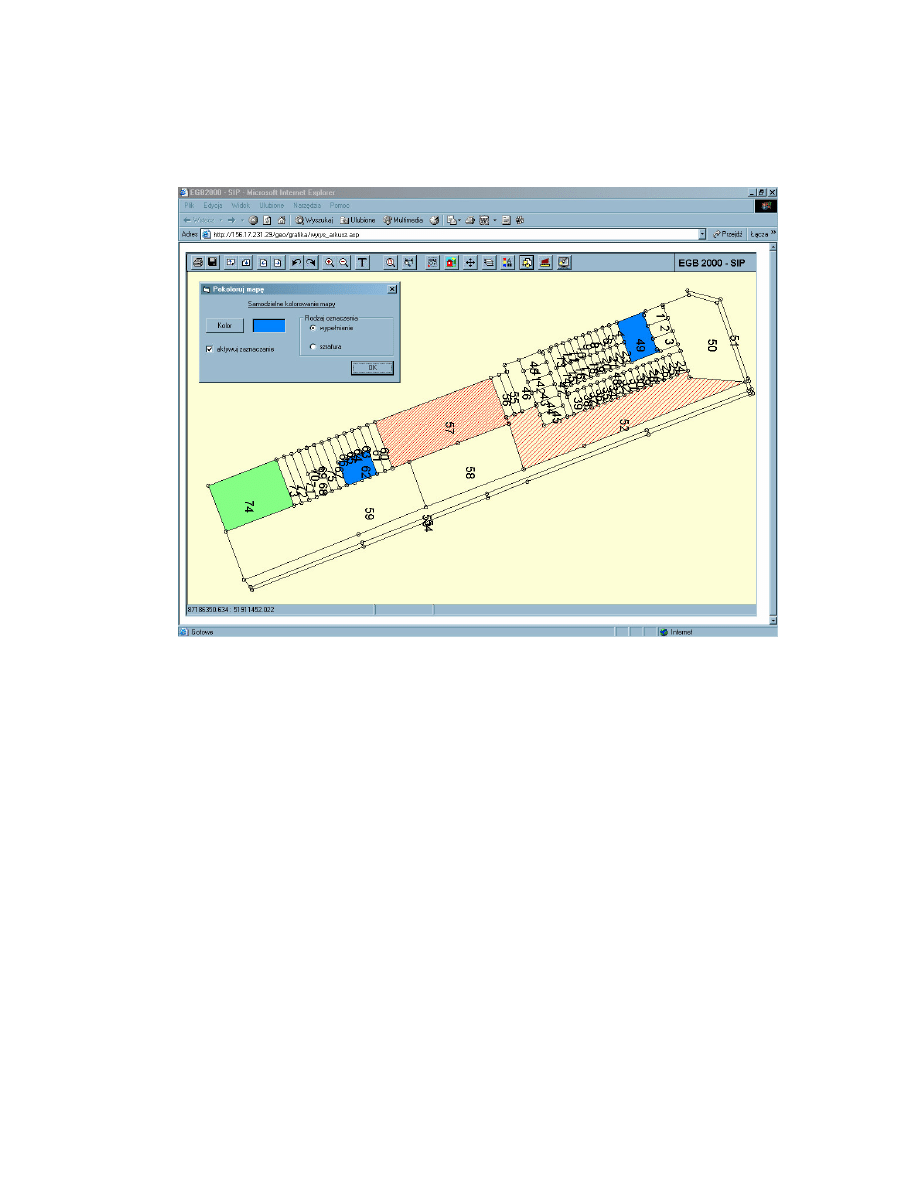
85
W ka
ż
dym momencie kolorowania mapy istnieje mo
ż
liwo
ść
zmiany koloru oraz
sposobu stosowanego oznaczenia.
Rysunek 42. Samodzielne ustalanie gamy kolorystycznej mapy.
Pomiary
Charakterystyczn
ą
cech
ą
pomiarów jest fakt, i
ż
dotycz
ą
obiektów
geograficznych. Najcz
ęś
ciej wykonywane pomiary to: pomiar odległo
ś
ci, pola
powierzchni, długo
ś
ci linii, obwodu. Funkcje pomiaru pola powierzchni oraz obwodu
wykorzystywane były przy wcze
ś
niej opisywanych mechanizmach, a tak
ż
e weszły w
skład specjalistycznego narz
ę
dzia do wykonywania pomiarów. Umo
ż
liwia ono
dokonywania wszystkich wymienionych wcze
ś
niej oblicze
ń
, pozwala tak
ż
e na
obliczenie k
ą
ta, pod jakim nachylona jest linia pomiarowa; Rysunek 43. Jednostk
ą
obowi
ą
zuj
ą
c
ą
jest milimetr w celu odwzorowania wi
ę
kszej dokładno
ś
ci.
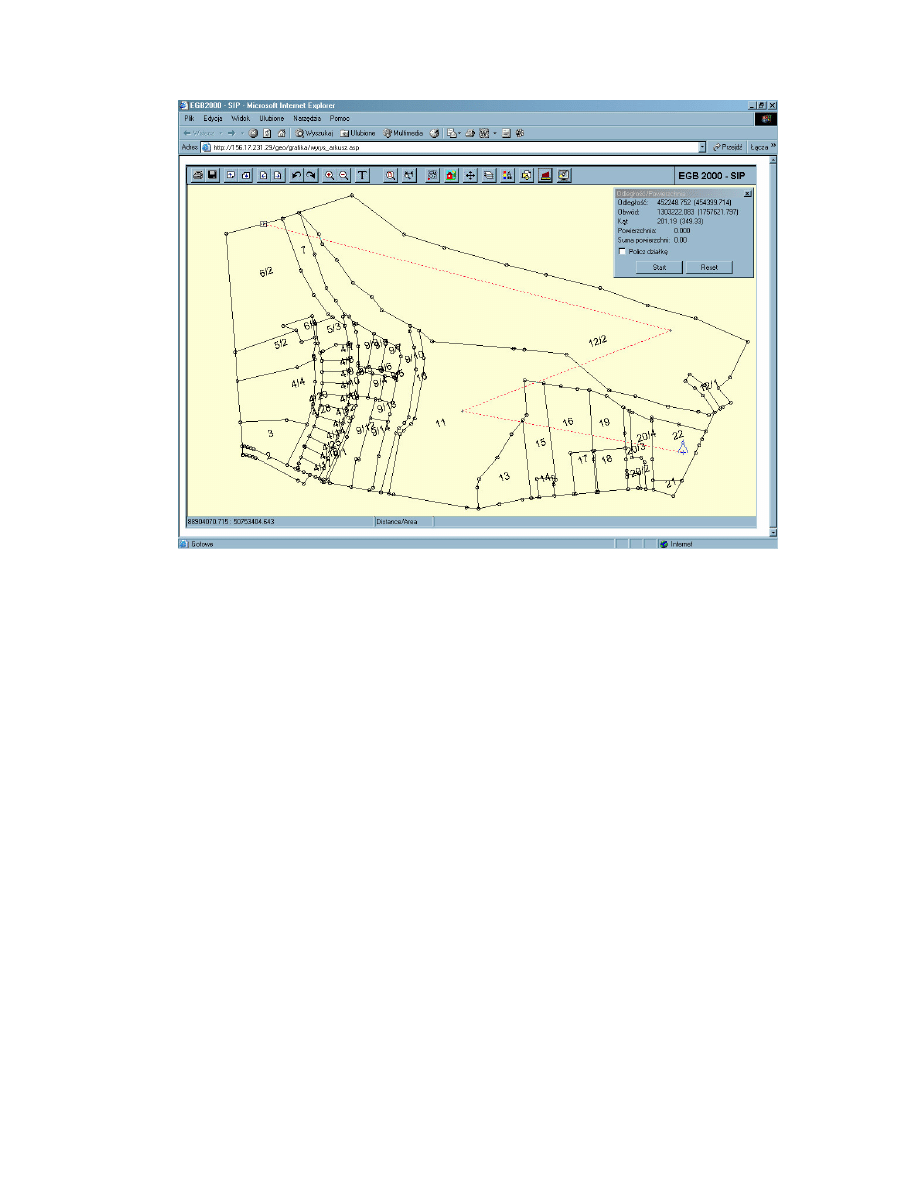
86
Rysunek 43. Pomiar odległości.
Sposób działania funkcji wygl
ą
da nast
ę
puj
ą
co:
-
w pierwszym etapie nale
ż
y aktywowa
ć
narz
ę
dzie pomiarowe. Czynno
ść
ta
jest konieczna gdy
ż
nale
ż
y odblokowa
ć
warstwy, na których b
ę
d
ą
dokonywane pomiary
-
w celu rozpocz
ę
cia pomiarów nale
ż
y nacisn
ąć
przycisk start na narz
ę
dziu
pomiarowym. Od tej chwili mo
ż
na dokonywa
ć
interaktywnych pomiarów na
mapie. Przycisk reset powoduje wykasowanie wcze
ś
niejszych pomiarów i
rozpocz
ę
cie od nowa.(Rysunek 43)
-
je
ż
eli zaznaczono pole „policz działk
ę
” wówczas po klikni
ę
ciu na obiekt,
uzyskujemy szczegółowe informacje o jego powierzchni i obwodzie, czyli
dane geometryczne. Dodatkowo, gdy u
ż
ytkownik kliknie na kolejny obiekt
uzyska zsumowane pola powierzchni działek. Jest to bardzo wygodne, gdy
ż
pozwala w szybki sposób policzy
ć
sum
ę
powierzchni kilku działek.
-
mo
ż
liwe jest równie
ż
policzenie odległo
ś
ci pomi
ę
dzy klikowa punktami, a
tak
ż
e policzenie obwodu i pola powierzchni po stworzeniu poligonu z tych
punktów
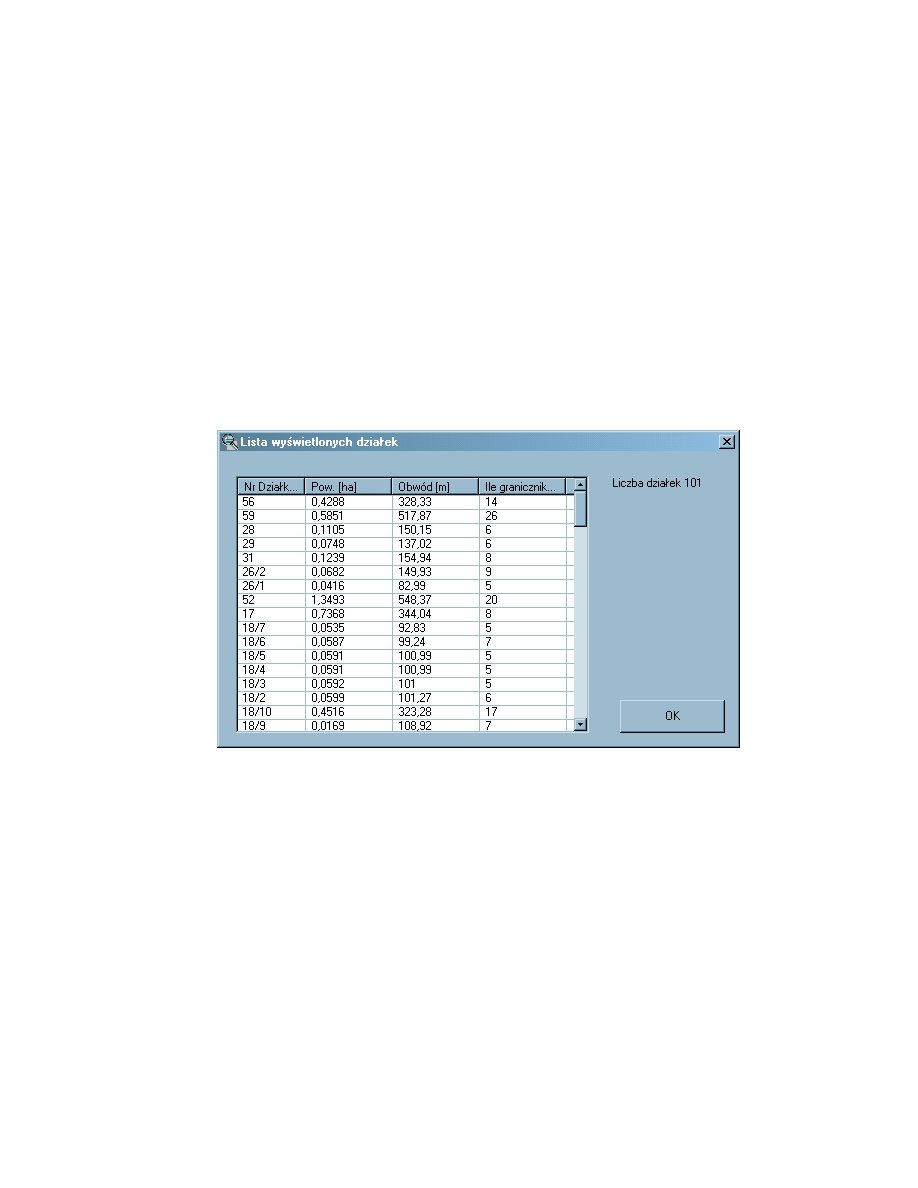
87
6.5. Dodatkowe opcje
W systemie dodatkowo zaimplementowano szereg funkcji, które nie maj
ą
analitycznego charakteru, ale s
ą
bardzo u
ż
yteczne.
6.5.1. Lista wyświetlonych działek
W przypadku du
ż
ej liczby działek zachodzi potrzeba uzyskania podstawowych
informacji o wszystkich działkach na mapie. EGB2000-SIP wy
ś
wietla list
ę
wszystkich
działek tworz
ą
cych map
ę
. Dla ka
ż
dej z działki podany jest obwód w metrach,
powierzchnia w hektarach oraz numer działki. Dodatkowo wy
ś
wietlona jest liczba
działek.
Rysunek 44. Lista wyświetlonych działek.
6.5.2. Menadżer warstw
System posiada budow
ę
warstwow
ą
. Ka
ż
da z warstw reprezentuje odr
ę
bne
obiekty, które s
ą
dla niej charakterystyczne. Wyró
ż
niamy:
-
warstwa działek
-
warstwa numerów działek
-
warstwa budynków
-
warstwa etykiet
Menad
ż
er warstw jest narz
ę
dziem, które umo
ż
liwia zarz
ą
dzanie warstwami
tematycznymi mapy. W wielu przypadkach, jak np.: w czasie wydruku lub w celu
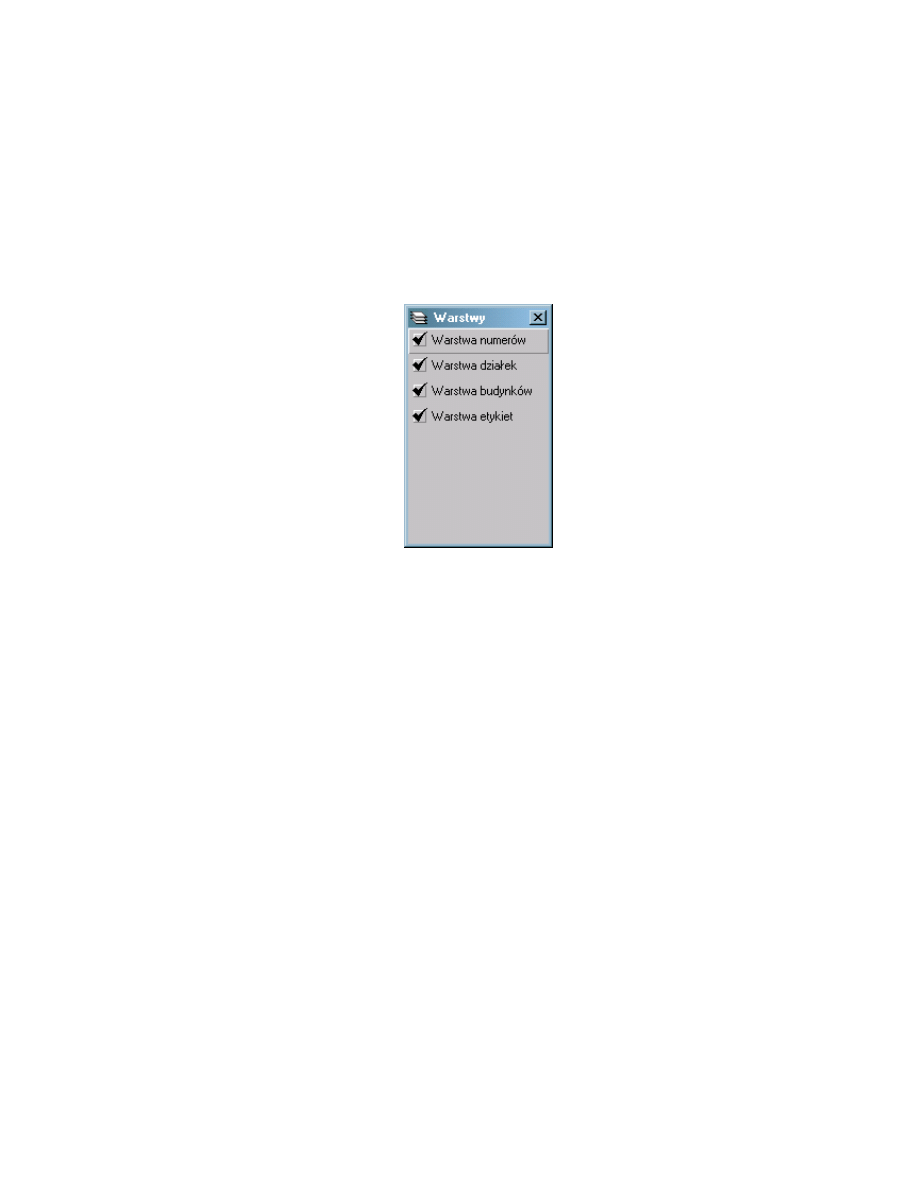
88
zwi
ę
kszenia czytelno
ś
ci mapy zachodzi potrzeba zmniejszenia szczegółowo
ś
ci mapy.
Do tego celu znakomicie nadaje si
ę
ten mechanizm. W ka
ż
dej chwili istnieje mo
ż
liwo
ść
wył
ą
czenia wybranej warstwy lub te
ż
aktywowania jej. Pod pewnym wzgl
ę
dem jest on
porównywalne do procesu generalizacji, z tym,
ż
e nie jest wykonywany automatycznie.
W danym momencie musi by
ć
widoczna co najmniej jedna warstwa. Brak takiego
warunku powodował, i
ż
u
ż
ytkownik mógł spowodowa
ć
całkowite wył
ą
czenie mapy.
Rysunek 45. Menadżer warstw
6.5.3. Nawigator
Nawigator jest narz
ę
dziem, które ułatwia i znacznie usprawnia poruszanie si
ę
po
mapie. Pozwala zorientowa
ć
si
ę
, gdzie aktualnie znajduje si
ę
u
ż
ytkownik. Mechanizm
ten jest bardzo pomocny w przypadku du
ż
ych powi
ę
ksze
ń
lub, gdy zachodzi potrzeba
znacznego przemieszczenia si
ę
na mapie np.: przy wy
ś
wietlaniu jednostki rejestrowej.
Nawigator obrazowany jest w postaci odr
ę
bnego okienka wywoływanego na
żą
danie.
Przedstawia on wła
ś
ciw
ą
map
ę
w du
ż
ym pomniejszeniu. Miejsce, w którym aktualnie
znajduje si
ę
u
ż
ytkownik oznaczone jest prostok
ą
t. Prostok
ą
t ten dynamicznie zmienia
rozmiar i poło
ż
enie. Powi
ę
kszanie mapy wła
ś
ciwej sprawia, i
ż
prostok
ą
t maleje,
pomniejszanie powoduje odwrotn
ą
akcj
ę
. W trakcie przesuwania si
ę
na mapie prostok
ą
t
równie
ż
zmienia poło
ż
enie. Wszystkie te zmiany s
ą
widoczne przy zało
ż
eniu,
ż
e
nawigator jest otwarty.
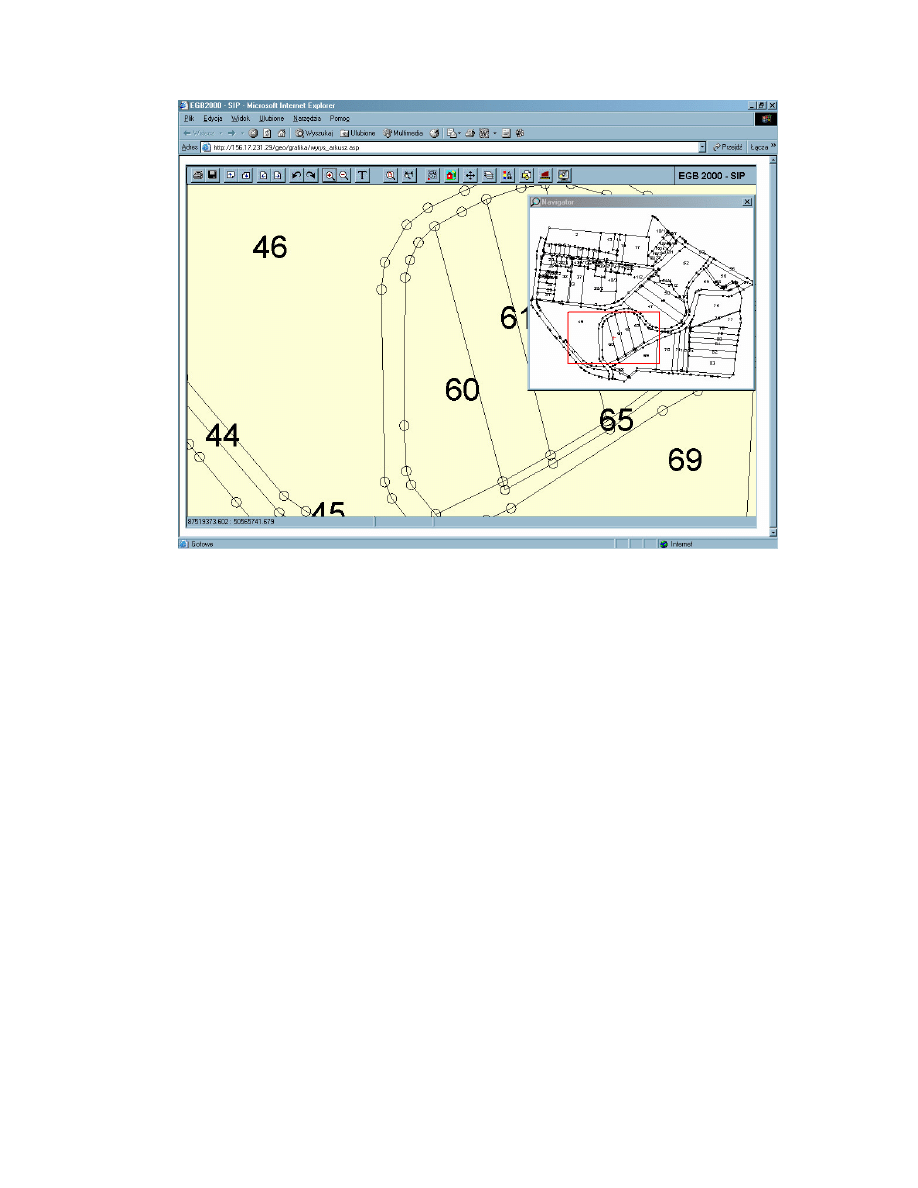
89
Rysunek 46. Przykład użycia narzędzia nawigator.
Istnieje równie
ż
mo
ż
liwo
ść
przemieszczania si
ę
po mapie przy pomocy okna
nawigatora. Wystarczy „chwyci
ć
” myszk
ą
prostok
ą
t w nawigatorze i go przesuwa
ć
.
Zmiana poło
ż
enia na mapie dokonywana jest na bie
żą
co lub te
ż
po zwolnieniu
przycisku myszki. Zale
ż
y to od ustawie
ń
w opcjach narz
ę
dzia, które dost
ę
pne s
ą
po
klikni
ę
ciu na tło nawigatora.
6.5.4. Inne funkcje systemu
Dodatkowo system posiada szereg innych funkcji, które ułatwiaj
ą
w znacznym
stopniu prac
ę
z map
ą
:
-
r
ę
czne przesuwanie mapy
Opcja ta pozwala na r
ę
czne przesuwanie mapy w czterech kierunkach; góra
dół, lewo, prawo. Na postawie tej funkcji zbudowano narz
ę
dzie nawigator,
jednocze
ś
nie ulepszaj
ą
c jej działanie.
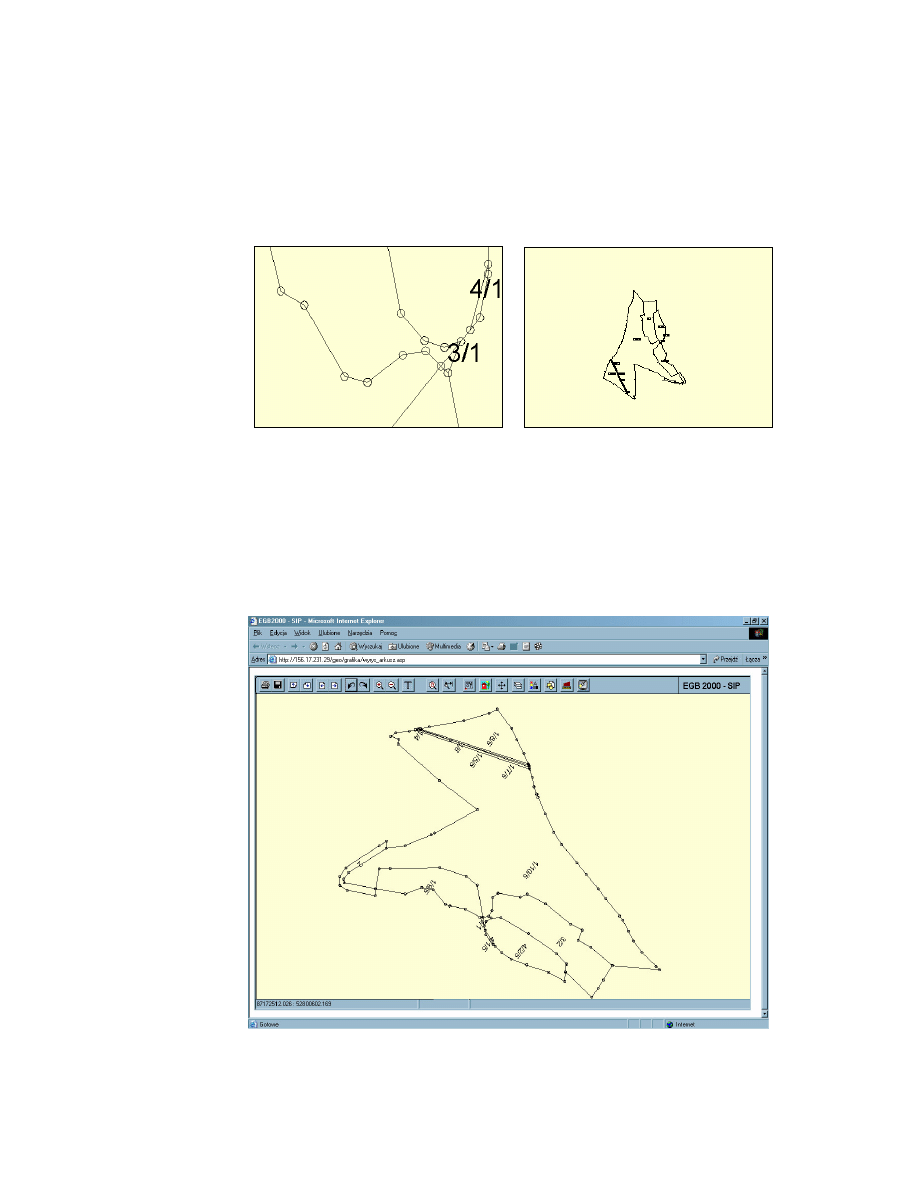
90
-
powi
ę
kszanie i pomniejszanie mapy
Przy zmniejszaniu mapy ilo
ść
widocznych elementów maleje(Rysunek 477),
natomiast przy zwi
ę
kszaniu szczegółowo
ść
mapy wzrasta(Rysunek 478).
Zastosowano tu wbudowan
ą
generalizacj
ę
z biblioteki graficznej VeCAD.
Rysunek 47. Operacja powiększenia
Rysunek 48. Operacja pomniejszenia
-
obrót w lewo i prawo
Mo
ż
liwe jest dokonywanie obrotów w układzie dwuwymiarowym; lewo,
prawo. Operacja pozwala idealnie dopasowa
ć
map
ę
do wielko
ś
ci okna, lub
przygotowa
ć
do wydruku.
Rysunek 49. Obrót mapy.
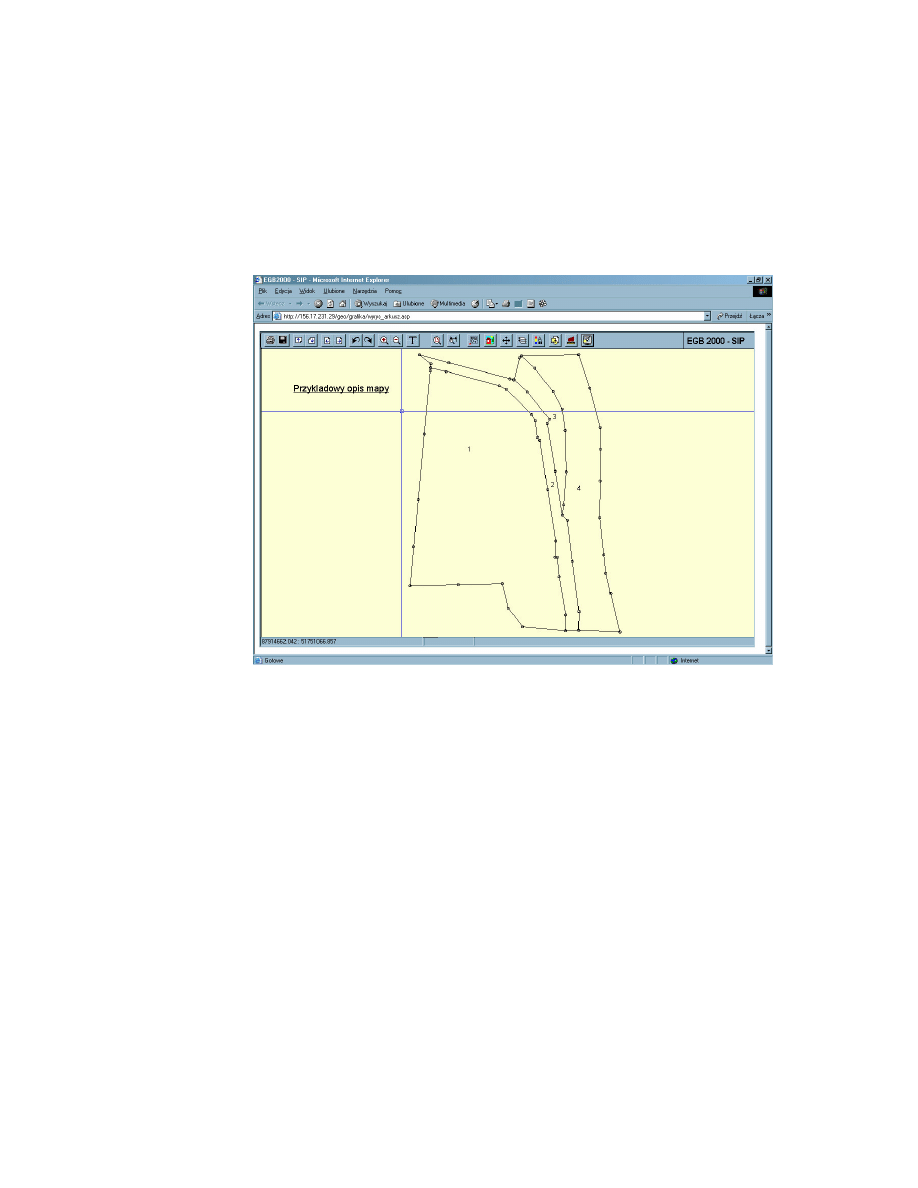
91
-
dodawanie opisu tekstowego na mapie
Mechanizm pomocy w przypadku robienia wydruków z mapy gdzie trzeba
doda
ć
jaki
ś
dodatkowy opis. Mo
ż
liwe jest okre
ś
lenie podstawowych
parametrów tekstu, jak: czcionka, rozmiar, kolor, styl.
Rysunek 50. Przykładowy opis mapy
-
zapis mapy do formatu BMP
Funkcja pozwala na zapisanie zawarto
ś
ci ekranu, któr
ą
stanowi mapa do
pliku graficznego w formacie BMP na dysku klienta.

92
Podsumowanie
W pracy
przedstawiłem dynamicznie rozwijaj
ą
c
ą
si
ę
klas
ę
systemów
informacyjnych
, jak
ą
s
ą
Systemy Informacji Przestrzennej (
SIP
) oraz to, co w nich
najcenniejsze, czyli analizy przestrzenne. Na podstawie zdobytych do
ś
wiadcze
ń
zbudowałem system typu SIP, realizuj
ą
cy wybrane metody analityczne.
Analiza danych jest zagadnieniem niezwykle zło
ż
onym z tego wzgl
ę
du cel pracy
realizowany był etapami. W pocz
ą
tkowej fazie nale
ż
ało zapozna
ć
si
ę
z tematyk
ą
Systemów Informacji Przestrzennej oraz budow
ą
mapy numerycznej. Zagadnienie te
stanowiło fundament dla dalszych prac. Kolejny etap posłu
ż
ył rozpoznaniu funkcji
analitycznych, jakie oferuj
ą
systemy SIP. Okazało si
ę
, i
ż
s
ą
to zagadnienia niezwykle
zawiłe i rozbudowane. Stanowi
ą
serce ka
ż
dego systemu przestrzennego i s
ą
jego
najsilniejsz
ą
stron
ą
. System operuj
ą
cy na danych przestrzennych nie mo
ż
e by
ć
nazywane systemem SIP, je
ż
eli nie posiadaj
ą
funkcji analitycznych. To one stanowi
ą
jego najcenniejszy element.
Niezwykle istotne było rozpoznanie obecnego stanu systemów informacji przestrzennej.
Niestety s
ą
to narz
ę
dzia bardzo trudno dost
ę
pne i kosztowne. Mo
ż
na jedynie poczyta
ć
o
nich w ulotkach reklamowych, albo ogl
ą
dn
ąć
przykładowy film z działania aplikacji.
Udało mi
si
ę
dotrze
ć
do Geomedia, produktu firmy Intergraph, na którym wzorowałem
niektóre funkcje systemu. Równie
ż
współpraca z geodet
ą
była niezwykle pomocna i
pozwoliła na poprawn
ą
merytorycznie realizacj
ę
systemu.
Ostatni krok polegał na stworzeniu systemu realizuj
ą
cego wybrane funkcje
analityczne. Istnieje wiele metod analizy od tych prostych, jak wskazywanie do
niezwykle skomplikowanych, typu buforowanie czy pomiary. W pracy wybrałem
analizy, które s
ą
u
ż
yteczne i mo
ż
liwe do zrealizowania w zało
ż
onym czasie, a
mianowicie ................................................................................. Cel pracy został w pełni
zrealizowany
.
Sysetm EGB2000-SIP został zrealizowany przy współpracy z wrocławsk
ą
firm
ą
BOGART oraz Zarz
ą
dem Geodezji, Kartografii i Katastru Miejskiego we Wrocławiu.
jest on zintegrowany z internetowym systemem dost
ę
pu do ewidencji gruntów,
budynków i lokali iEGB wykonywanym w ramach równolegle prowadzonych prac
magisterskich [13,18].

93
EGB2000-SIP oferuje funkcjonalno
ść
, zbli
ż
on
ą
do rozwi
ą
za
ń
komercyjnych,
pod niektórymi wzgl
ę
dami dorównuj
ą
ce systemom informacji przestrzennej
renomowanych firm
ś
wiatowych, np. Intergraph i ESRI.
Stworzony system charakteryzuje si
ę
bardzo du
żą
elastyczno
ś
ci
ą
, dzi
ę
ki czemu
mo
ż
na go łatwo rozwija
ć
. Przewidywane jest wykorzystanie opracowanych w ramach
niniejszej pracy metod analizy w głównym systemie ewidencji gruntów budynków i
lokali EGB2000 funkcjonuj
ą
cym w architekturze klient-serwer. W planach jest
wdro
ż
enie systemu EGB2000-SIP w urz
ę
dach miajskich we Wrocławiu i w Toruniu
oraz w staostwach powiatowych w Górze i w Trzebnicy.
Mo
ż
liwo
ś
ci dalszego rozwoju mo
ż
na upatrywa
ć
równie
ż
we wprowadzeniu
elementów edycji danych w systemie. Ciekawym zagadnieniem wydaje si
ę
mo
ż
liwo
ść
dodanie trzeciego wymiaru, dzi
ę
ki czemu mo
ż
liwe stanie si
ę
wprowadzenie wielu
ciekawych elementów jak: pomiar wysoko
ś
ci obiektu, czy te
ż
obroty w przestrzeni.
Tak
ż
e funkcje typu buforowanie, autokowariancja przestrzenna stanowi
ą
ciekawy
element dalszych bada
ń
i mog
ą
znacznie poszerzy
ć
mo
ż
liwo
ś
ci systemu.Uwa
ż
am, i
ż
dziedzina ta wydaje si
ę
by
ć
niezwykle interesuj
ą
c
ą
i warta dalszego poznania.

94
Bibliografia
1.
Adamczewski Z.:
Wprowadzenie do numerycznego modelowania terenu.
Polskie
Towarzystwo Informacji Przestrzennej, VII Konferencja Naukowo –
Techniczna. Warszawa, 1998
2.
Cowen D.J.
The National Center for Geographic Information and Analysis
(
http://www.ncgia.ucsb.edu
)
3.
Fotheringham S., Rogerson P. :
Spatial Analysis and Geographic Information
Systems.
Taylor & Francis, 1994.
4.
Ga
ź
dzicki J.:
Systemy informacji przestrzennej.
PPWK, Warszawa 1990.
5.
Instrukcja techniczna "K-1 Mapa zasadnicza", wydana w 1998 r. przez
Głównego Geodet
ę
Kraju
6.
Kraak M., Ormeling F.:
Kartografia: wizualizacja danych przestrzennych.
PWN, Warszawa 1998
.
7.
Laurini R., Thompson D. :
Fundamental
s
of Spatial Information Systems
.
Academic Press London 1992.
8.
Magnuszewski A.:
GIS w geografii fizycznej
. PWN, Warszawa 1999
9.
Muller J.C.:
Generalization of spatial databases.
Longman Scientific &
Technical, Harlow 1989
10.
Microsoft Corporation:
Microsoft SQL Server Books online,
Microsoft
Corporation 1988 – 2000
11.
Myrda G.:
GIS, czyli mapa w komputerze.
HELION, Gliwice 1997
12.
Star J., Estes J.:
Geographic Information Systems: An Introduction
.
Prentice
Hall, 1990
13.
Urba
ń
ski J.:
Zrozumieć GIS. Analiza informacji przestrzennej.
PWN, Warszawa
1997
14.
Weber P.:
Wprowadzenie do geograficznych systemów informacyjnych.
Uniwersytet Warszawski, Warszawa 1992
15.
Winemiller E., Heyman B.:
Visual Basic w Bazach danych.
Robomatic,
Wrocław 1999
16.
Włochowicz S.:
Internetowy system dostępu do ewidencji gruntów.
Praca
magisterska na
Wydziale Informatyki i Zarz
ą
dzania Politechniki Wrocławskiej
(w opracowaniu)
Wrocław, 2002

95
17.
Yeh T.C.J:
Stochastic modeling of groundwater flow and solute transport in
aqufers.
Hydrological Processes. Vol.6, 1992
18.
Zapart P.:
Komputerowe Systemy Informacji Przestrzennej.
Warszawa
Intersoftland, 1994
Internet
19.
http://sun10.ci.pwr.wroc.pl/~zaklada/index.html
20.
http://witch.sggw.waw.pl/pl/edu/mat_do_cw/SIP/uzup
21.
http://www.virtualtourist.com
22.
http://credit.ae.wroc.pl/~laska/index_SIP.html
23.
http://www.fes.uwaterloo.ca/crs/geog255.f99/Geog255.html
24.
http://www.mapinfo.pl
25.
http://www.oracle.com/pl/
26.
http://www.intergraph.com
27.
http://www.gis.com.pl
28.
http://www.bentley.com
29.
http://www.microimages.com
30.
http://www.lasypanstwowe.gov.pl

96
Spis ilustracji
Rysunek 1. Obiekt punktowy (A), liniowy (B) i powierzchniowy (C) w prostym modelu
wektorowym..................................................................................................15
Rysunek 2. Topologiczny model danych. ....................................................................16
Rysunek 3. Rastrowy i wektorowy model danych........................................................17
Rysunek 4. Ilustracja triangulacji Delaunaya ..............................................................18
Rysunek 5. Warstwice; utworzone w programie Surfer 7.............................................19
Rysunek 6. Barwne zdj
ę
cie lotnicze w podczerwieni. Przedstawia struktur
ę
wiekow
ą
i gatunkow
ą
drzewostanów oraz jako
ść
upraw le
ś
nych.[30] ............25
Rysunek 7. Mapa numeryczna miasta Tuchole. [23] ....................................................28
Rysunek 8. Fragment al. LOP w mie
ś
cie Tuchole; widoczna jest tak
ż
e sie
ć
uzbrojenia
podziemnego.[23] ..........................................................................................28
Rysunek 9. Rozwarstwienie informacji przestrzennej.[30]...........................................30
Rysunek 10. Wypełnienie............................................................................................31
Rysunek 11. Szrafura...................................................................................................31
Rysunek 12. Kształt i orientacja powierzchni odwzorowuj
ą
cych.[4]............................36
Rysunek 13. Podział na strefy według 1965.................................................................37
Rysunek 14. Fragment mapy rastrowej u
ż
ywanej jako podkład. ..................................39
Rysunek 15. Cz
ęść
mapy z rys. 14 w du
ż
ym powi
ę
kszeniu .........................................40
Rysunek 16. Schemat działania Web GIS ....................................................................41
Rysunek 17. Funkcja przynale
ż
no
ś
ci do zbioru (od lewej): w logice standardowej, w
logice rozmytej ..............................................................................................44
Rysunek 18. Funkcja wskazywania[23] .......................................................................46
Rysunek 19. Funkcja klasyfikacji wykonana na podstawie jednej cechy atrybutowej.
Obrazuje ilo
ść
klientów firmy X w poszczególnych województwach.[23] .....47
Rysunek 20. Bufor utworzony wzdłu
ż
obiektu liniowego ............................................49
Rysunek 21. Rasteryzacja - zmiana linii na raster ........................................................52
Rysunek 22. Moduł PC Network systemu ArcInfo [26] ...............................................54
Rysunek 23. Klasyfikacja mapy w systemie MapInfo Professional [23].......................55
Rysunek 24 MGE Analyst [25]....................................................................................56
Rysunek 25. Przykład u
ż
ycia Microstation Geographics [27] ......................................57
Rysunek 26. Praca na mapie wektorowej z podkładem rastrowym [28] .......................58
Rysunek 27. Główne okno EGB2000 Internet .............................................................60
Rysunek 28. Schemat działania systemu EGB2000-SIP...............................................68
Rysunek 29. Główne okno programu EGB2000–SIP...................................................72
Rysunek 30. Wy
ś
wietlenie arkusza danych..................................................................73
Rysunek 31. Arkusz z wybranymi dzialkiami. .............................................................74
Rysunek 32. Pojedyncza działka z otoczeniem. ...........................................................75
Rysunek 33. Jednostka rejestrowa. ..............................................................................76
Rysunek 34. Działki zawarte w prostok
ą
cie o zadanych wymiarach. ...........................76
Rysunek 35. Przykład u
ż
ycia funkcji wskazywania w systemie. ..................................78
Rysunek 36. Wyszukiwanie wg numerów; działka o numerze 4. .................................80
Rysunek 37. Wyszukane działek, których powierzchnia jest mniejsza od jednego
hektara...........................................................................................................81
Rysunek 38. Wybór
ź
ródła danych do klasyfikacji.......................................................82
Rysunek 39. Wybór klasyfikacji i typu oznaczenia działek. .........................................83
Rysunek 40. Wybór gamy kolorów dla klasyfikacji wg przeznaczenia działek.............83

97
Rysunek 41. Klasyfikacja mapy wg przeznaczenia. .....................................................84
Rysunek 42. Samodzielne ustalanie gamy kolorystycznej mapy. .................................85
Rysunek 43. Pomiar odległo
ś
ci....................................................................................86
Rysunek 44. Lista wy
ś
wietlonych działek....................................................................87
Rysunek 45. Menad
ż
er warstw ....................................................................................88
Rysunek 46. Przykład u
ż
ycia narz
ę
dzia nawigator.......................................................89
Rysunek 47. Operacja powi
ę
kszenia Rysunek 48. Operacja pomniejszenia...........90
Rysunek 49. Obrót mapy. ............................................................................................90
Rysunek 50. Przykładowy opis mapy ..........................................................................91
98
Załącznik A. Klasyfikacja map tematycznych
Podział map tematycznych na:
zespoły, grupy, podgrupy i przykładowe rodzaje map [5]
Mapy tematyczne
Zespoły
Grupy
Podgrupy
L.p.
Przykładowe rodzaje map
1
2
3
4
5
1. Mapa
zasadnicza
2. Podstawowego
zagospodarowania
terenu
1.
2.
3.
Mapy pochodne od mapy zasadniczej
Mapy zagospodarowania i użytkowania terenu
Mapy ewidencji gruntów
3. Uzbrojenie
terenu
1.
2.
3.
Mapy sieci wodociągowej
Mapy sieci kanalizacyjnej
Mapy sieci cieplnej
4. Komunikacji
1.
2.
3.
Mapy układu komunikacyjnego
Mapy zbiorowej komunikacji miejskiej
Mapy organizacji ruchu kołowego
5. Gospodarki
mieszkaniowej
1.
2.
3.
Mapy rozmieszczenia typów budownictwa
mieszkaniowego
Mapy rozmieszczenia i struktury zasobów
mieszkaniowych
Mapy intensywności zabudowy mieszkaniowej
6. Przemysłu
1.
2.
Mapy zakładów przemysłowych
Mapy zagospodarowania terenu przemysłowego
Mapy
społeczno -
gospodarcze
Mapy
gospodarcze
7. Rolnictwa
1.
2.
3.
Mapy użytkowania ziemi
Mapy struktury władania gruntami
Mapy glebowo - rolnicze
99
8. Usług
1.
2.
3.
Mapy rozmieszczenia i charakterystyki obiektów
oświaty, nauki, kultury i sztuki, układów
zabytkowych i zabytków
Mapy rozmieszczenia i charakterystyki obiektów
ochrony zdrowia
Mapy rozmieszczenia i charakterystyki usług
Mapy
społeczno -
gospodarcze
Mapy
gospodarcze
9. Swobody
dyspozycyjności
terenu
1.
2.
3.
Mapy gleb chronionych
Mapy terenów objętych ochroną przyrody
Mapy charakterystyki prawnej terenu wynikającej
z tytułu własności
1. Demograficzne
1.
2.
3.
Mapy rozmieszczenia ludności
Mapy gęstości zaludnienia
Mapy struktury płci i wieku
2. Wybranych
elementów
socjalno -
bytowych
1.
2.
Mapy rozmieszczenia miejsc pracy i struktury
zawodowej
Mapy migracji dziennych w miastach i
aglomeracjach miejskich
Mapy
społeczno -
gospodarcze
Mapy
społeczne
3. Patologii
społecznych
1.
2.
3.
Mapy chorób społecznych
Mapy wypadków drogowych
Mapy przestępczości
1. Geologiczne
1.
2.
3
Mapy geologiczno - gruntowe
Mapy gruntów
Mapy zasobów mineralnych
2. Rzeźby terenu
1.
2.
3.
Mapy geomorfologiczne
Mapy warstwicowe
Mapy spadku terenu
3. Hydrograficzne
1.
2.
3.
Mapy wód powierzchniowych
Mapy wód gruntowych
Mapy warunków hydrobiologicznych
Mapy
przyrodnicze
Mapy
fizjograficzne
4. Klimatu
lokalnego
1.
2.
Mapy bonitacyjne klimatów lokalnych dla potrzeb
lokalizacji zabudowy mieszkaniowej,
przemysłowej, rekreacyjnej i wypoczynkowej
Mapy nasłonecznienia i lokalnych warunków
wietrznych

100
5. Glebowe
1.
2.
3.
Mapy glebowo – bonitacyjne
Mapy glebowej klasyfikacji gruntów
Mapy glebowo - przyrodnicze
6. Szaty roślinnej
1.
2.
Mapy charakterystyki siedliskowo -
drzewostanowej
Mapy odporności siedliskowej
7. Świata
zwierzęcego
1.
Mapy rozmieszczenia i charakterystyki zwierząt
dzikich
1. Zagrożenia
ś
rodowiska
1.
2.
3.
Mapy zanieczyszczenia wód powierzchniowych
Mapy zanieczyszczenia wód podziemnych
Mapy erozji i stepowienia gleb
Mapy
sozologiczne
2. Ochrony
ś
rodowiska
1.
2.
3.
Mapy ochrony zasobów mineralnych
Mapy obszarów rekultywowanych rolniczo
Mapy ochrony walorów przyrodniczo -
krajobrazowych
101
Załącznik B. Zestawienie programów typu SIP/GIS.
Tabelka została opracowana na podstawie [13] i poddana aktualizacji.
Nazwa
programu
Produ-
cent
Platforma
sprzętowa
Moduły
Analiza
danych
wektoro-
wych
Zasto-
sowanie
topologii
Analiza
danych
rastro-
wych
Model
terenu i
jego
analia
Funkcje
sieciowe
Wspo-
maganie
geodezji
Wbudo-
wany język
Klasy-
fikacja
Zastosowanie Orientacyjna
cena
Work
Station
Arc/Info
ESRI
UNIX
Apollo
DECStatio
n Hewlett-
Packard
Intergraph
NEC
Silicon
Graphics
Sun
ARC/INFO
COGO
TIN
NETWORK
GRID
SCAN
EXPRESS
PRESS
STORM
Tak
(Arc/Info)
Tak
Tak
(Grid)
Tak
wekto-
rowy
(TIN)
Tak
(Net-
work)
Tak
(Cogo)
Tak
(AML)
pełny
system GIS
Wszystkie
prace, bez
analizy zdjęć
satelitarnych
pełen zestaw
około 50000$
(zniżka
akademicka)
PC
Arc/Info
ESRI
PC-DOS
Starter Kit
ArcPlot
ArcEdit
Network
Overlay
Data Con-
version TIN
SEM
Tak
(Starter
Kit,
Overlay)
Tak
Nie
Tak
wekto-
rowy
(TIN,
SEM)
Tak
(Net-
work)
Nie
Tak
(CSML)
system gis
bez modelu
rastro-
wego
wektorowa
analiza GIS
pełen zestaw
około 8000$
ArcCAD ESRI
PC-DOS +
Auto CAD
Nie
Tak
Tak
Nie
Nie
Nie
NIe
Tak
nakładka
GIS na
AutoCAD
wektorowa
analiza GIS
sprzężona z
AutoCAD
1600$ + cena
AutoCAD
ArcView ESRI
UNIX
Windows
Spatial
analyst
Network
analyst
Ograni-
czona
Nie
Ograni-
czona
Nie
Nie
Nie
Tak
(Avenue)
wizuali-
zacja
zbiorów
Arc/Info
wizualizacja
i najprostsza
analiza
UNIX: 2500$
Windows:
1250$
AtlasGIS Strategic
Mapping
PC-DOS
Windows
Nie
Tak
Nie
Nie
Nie
Ograni-
czone
Nie
Tak
(Atlas
Script)
wektorowy
system GIS
bez
wszystkich
funkcji
wektorowa
analiza GIS
750 $
102
Nazwa
programu
Produ-
cent
Platforma
sprzętowa
Moduły
Analiza
danych
wektoro-
wych
Zasto-
sowanie
topologii
Analiza
danych
rastro-
wych
Model
terenu i
jego
analia
Funkcje
sieciowe
Wspo-
maganie
geodezji
Wbudo-
wany język
Klasy-
fikacja
Zastosowanie Orientacyjna
cena
EASI/PA
CE
PCI-
Remote
Sensing
Corp.
UNIX
Hewlett-
Pacard
Intergraph
DECStatio
n Silicon
Graphics
Sun
PC-DOS
Windows
NT
WS-RSP
WS-MLM
WS-TA
inne
Nie
Nie
Tak
(WS-
MLM)
Tak
rastro-wy
(WS-TA)
Nie
Nie
Tak
system
analizy
obrazy
zdjęć
satelitarnyc
h i
lotniczych
analiza obra-
zów satelitar-
nych i lotni-
czych
rastrowy GIS
zestaw z
podstawo-wymi
mod.:
UNIX: 30000$,
Widnows NT:
4200$
ER
Mapper
Earth
Resorce
mapping
Windows
95/NT
UNIX
Nie
Nie
Nie
Tak
Nie
Nie
Nie
NIe
system
analizy
obrazu
analiza zdjęć
i rastrowy
GIS
2900$
Erdas -
Imagine
Erdas
Inc.
UNIX,
Windows
NT
Tak
Nie
Nie
Tak
Tak
rastro-wy
Nie
Nie
Tak
(C-Pro-
grammers
toolkit)
system
analizy
obrazu
analiza zdjęć
i rastrowy
GIS
6000$
Geo-Info Biuro
Informa-
tyki
Systherm
PC-DOS +
AutoCAD
Tak
Nie (tylko
proste
zapytania)
Nie
Nie
Ogra-
niczo-ny
Nie
Tak
Nie
ewidencja
gruntów,
wspomaga-
nie
geodezji
wspomaga-
nie geodezji
tam, gdzie
pracuje CAD
5000$ + cena
AutoCAD
Gemini
Asplan
VIAK
Informa-
sjon ste-
knologi
PC-DOS
Utility
Surveying
NET/GPS
TERRAIN
Nie
NIe
Nie
Ogra-
niczo-ny
Nie
Tak
Nie
wspoma-
ganie prac
geodezyj-
nych
wspomaganie
geodezji
8000$
Idrisi
Clark
Univ.
PC-DOS
Windows
Tak
Nie
Nie
Tak
Tak
rastro-wy
Nie
NIe
Nie
system
rastrowy
GIS
rastrowa
analiza GIS
400-900$ (zniżka
aka-demicka)
Mapa-
500
Aplikom
2001
PC-DOS +
AutoCAD
Mapa-500
Geo-pola
Geosecmy
Nie
Nie
Nie
Ogra-
niczo-ny
Nie
Tak
Nie
wspomaga-
nie prac
geodezyj-
nych
wspomaganie
geodezji
?
103
Nazwa
programu
Produ-
cent
Platforma
sprzętowa
Moduły
Analiza
danych
wektoro-
wych
Zasto-
sowanie
topologii
Analiza
danych
rastro-
wych
Model
terenu i
jego
analia
Funkcje
sieciowe
Wspo-
maganie
geodezji
Wbudo-
wany język
Klasy-
fikacja
Zastosowanie Orientacyjna
cena
MapInfo Map Info
Corp.
Windows
Nie
Tak
Tak
Tak
Tak
Tak
Tak
Tak
(Map
Basic)
Bardzo
dobry
system GIS
proste wekto-
rowe analizy
GIS, desktop
mapping
1500$
MGE
(Modular
GIS
Envi-
ronmet)
Intergrap
h US
UNIX
Intergraph
Windows
NT
Analist
GRID-
Analist
Terrein M.
Network A. i
inne
Tak
(Analist)
Tak
Tak
(GRID
Analist)
Tak
Tak
Tak
?
pełny
system GIS
analizy GIS
wszelkiego
rodzaju
4000$
TNTmips Micro
Images
Inc. US
Windows
UNIX
Silicon
Graphics
Hewlett-
Packard
Apollo Sun
Nie
Niepełna
Tak
Tak
Tak
rastro-wy
Nie
Nie
Tak
(SML)
rastrowy
system GIS
rastrowa
analiza GIS
4000$
Wyszukiwarka
Podobne podstrony:
Rekord bibliograficzny, Studia INiB, Formaty danych w systemach informacyjno-wyszukiwawczych
Opracowanie ekofizjograficzne, Studia - IŚ - materiały, Semestr 06, Systemy informacji przestrzennej
System informacji przestrzennej
Opis tradycyjny dokumentów ciągłych - wzór, Studia INiB, Formaty danych w systemach informacyjno-wys
SIP WYK, Systemy informacji przestrzennej (SIP)
Pytania egz SiP, Geodezja i kartografia, Systemy Informacji Przestrzennych
Portal geostatystyczny, Geodezja i Kartografia UWMSC, Systemy Informacji Przestrzennej
sip (1), Geodezja i Kartografia UWMSC, Systemy Informacji Przestrzennej
SIP sciaga, Systemy informacji przestrzennej (SIP)
cwiczenia.... SIP -opracowanie zagadnien z cwiczen, Systemy informacji przestrzennej (SIP)
SIP WYKład, Systemy informacji przestrzennej (SIP)
Analiza i projektowanie systemow informatycznych S Wrycza 4CT
Technologie informacyjne baz danych w systemach informacyjnych zarządzaniaa
SIP kolos 2 sciąga, Geodezja i Kartografia UWMSC, Systemy Informacji Przestrzennej
Systemy informacji przestrzennej- notatki z wykładów, Geodezja i Kartografia UWMSC, Systemy Informac
Strefy opisu bibliograficznego, Studia INiB, Formaty danych w systemach informacyjno-wyszukiwawczych
gis c2, Systemy Informacji Przestrzennej
Pytania z SIPU egzamin I termin grupa I 2, Geodezja i Kartografia UWMSC, Systemy Informacji Przestrz
więcej podobnych podstron